Embed Size (px)
Citation preview

AN INTRODUCTION TO LASER SCANNING
PART 3 – MOBILE MAPPING AND ACCURACY
CHALLENGES

MOBILE MAPPING• SURVEYING FROM A GROUND BASED MOVING VEHICLE• COMBINING NAVIGATION DATA WITH LASER SCANNER DATA TO FORM A
POINTCLOUD

WHY MOBILE MAPPING?• FAST
• QUICK TO MOBILISE AND MAP• LOWER OPERATING COSTS
• CHEAPER THAN CONVENTIONAL SURVEY• SAFE
• MINIMISES SURVEY STAFF ON THE HIGHWAY• HIGH RESOLUTION
• HIGH LEVEL OF DETAIL ON THE PAVEMENT AND STRUCTURES• FLEXIBLE
• CAN BE USED ON MANY DIFFERENT TYPES OF PROJECTS

MMS COMPONENTS• NAVIGATION
• INERTIAL NAVIGATION SYSTEM (INS)• GLOBAL NAVIGATION SATELLITE SYSTEM (GNSS)• DISTANCE MEASUREMENT INDICATOR (DMI)
• LASER SCANNER(S)
• CAMERA (OPTIONAL)
• MOUNT

MAINTAINING GOOD ACCURACY• UNLIKE AIRBORNE LIDAR, MOBILE MAPPING SYSTEMS SUFFER FROM LOSS OF GNSS
• WITH NO GNSS, TRAJECTORY ACCURACY DECREASES EXPONENTIALLY OVER TIME DUE TO IMU INACCURACIES• HIGHER GRADE IMUS WILL MINIMISE THESE ERRORS• FOG IMU MORE SUITABLE FOR CHALLENGING GNSS ENVIRONMENTS
• A DMI WILL HELP IMPROVE ACCURACY WHEN GNSS IS NOT AVAILABLE

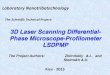
IMU ERROR OVER TIME – MEMS V FOG
0 50 100 150 200 250 300 3500.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
9.00
MEMS 3D Positional Error over Time30 60 120 180 240 300
Time
3D E
rror
(m)
0 50 100 150 200 250 300 3500.00
0.10
0.20
0.30
0.40
0.50
0.60
FOG 3D Positional Error over Time30 60 120 180 240 300
Time
3D E
rror
(m)

INS COUPLING• COUPLING IS A TERM USED TO DESCRIBE HOW THE INS AND GNSS INTERACT WITH EACH
OTHER IN ORDER TO IMPROVE ACCURACY
• LOOSELY COUPLED• THE POSITION AND VELOCITY FROM THE INS AND GNSS ARE COMBINED TO FORM A
TRAJECTORY• ALL MMS’ WILL HAVE AT LEAST A LOOSELY COUPLED INS
• TIGHTLY COUPLED• ALSO COMBINES THE GNSS RAW MEASUREMENTS WITH THE INS, THEREFORE ALLOWING GNSS
POSITION UPDATES WITH FEWER THAN FOUR SATELLITES• DEEPLY COUPLED
• AS TIGHTLY COUPLED BUT INFORMATION IS ALSO PASSED FROM THE INS FILTER TO THE GNSS FILTER, WHICH ENABLES FASTER GNSS SIGNAL REACQUISITION
• DIA+• AS LOOSELY COUPLED BUT INFORMATION IS ALSO PASSED FROM THE INS FILTER TO THE GNSS
FILTER, WHICH ENABLES FASTER GNSS SIGNAL REACQUISITION

COLOURED POINTCLOUD

DO YOU WANT TO KNOW MORE ABOUT MOBILE MAPPING?
IF SO, GO TO WWW.3DLASERMAPPING.COM/STREETMAPPER
UK: +44 1949 838 004South Africa: +27 12 940 0515Australia: +61 (0) 8 9261 7703North America: +1 720 214 3554