Embed Size (px)
Citation preview

The Making of XRobots
Jan Köhnlein Miro Spönemann
The Idea
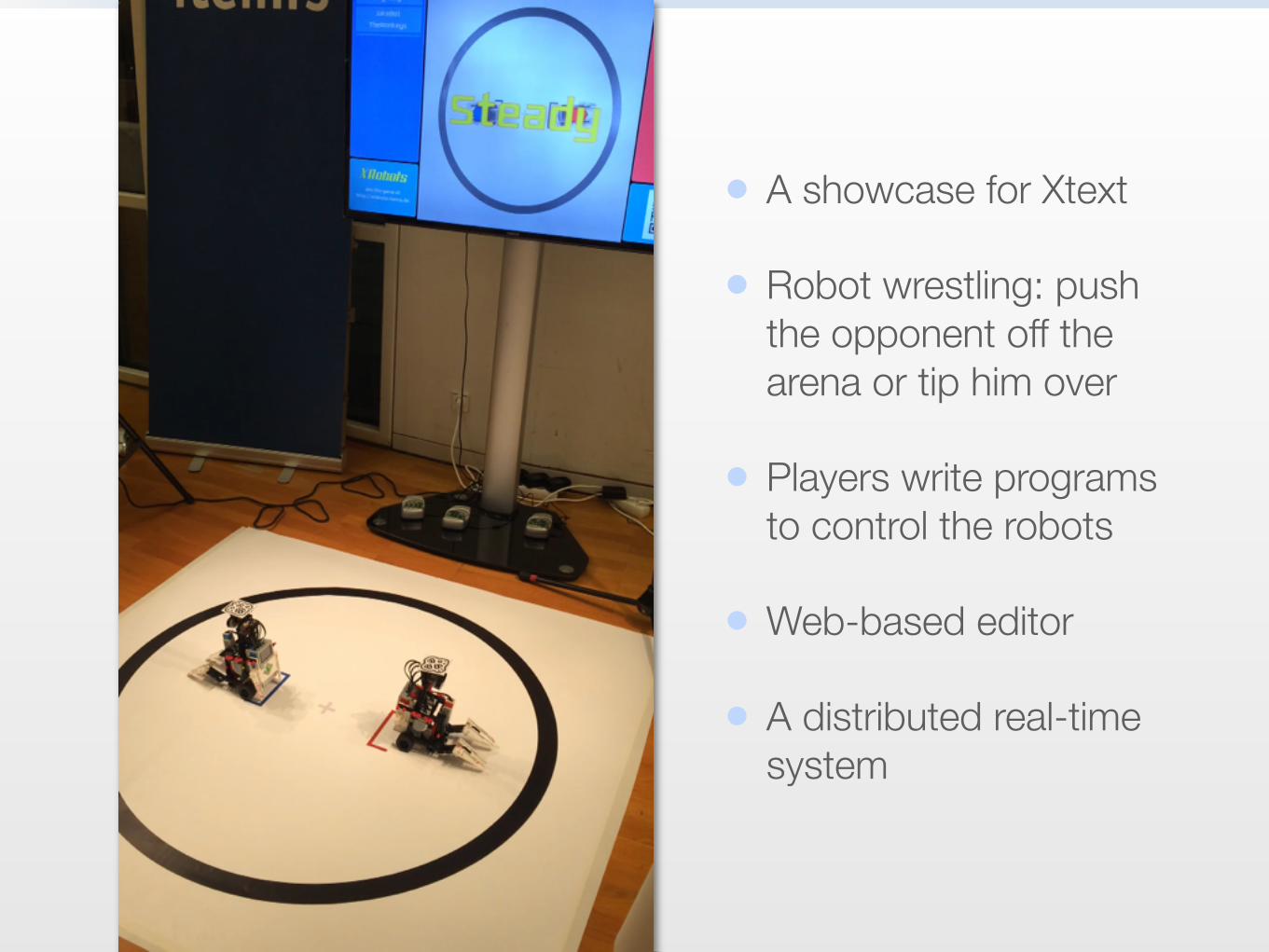
• A showcase for Xtext
• Robot wrestling: push the opponent off the arena or tip him over
• Players write programs to control the robots
• Web-based editor
• A distributed real-time system

Lego Mindstorms EV3
4 motors
4 sensors
USB
Bluetooth
SD card slotlego.com
Unpacking
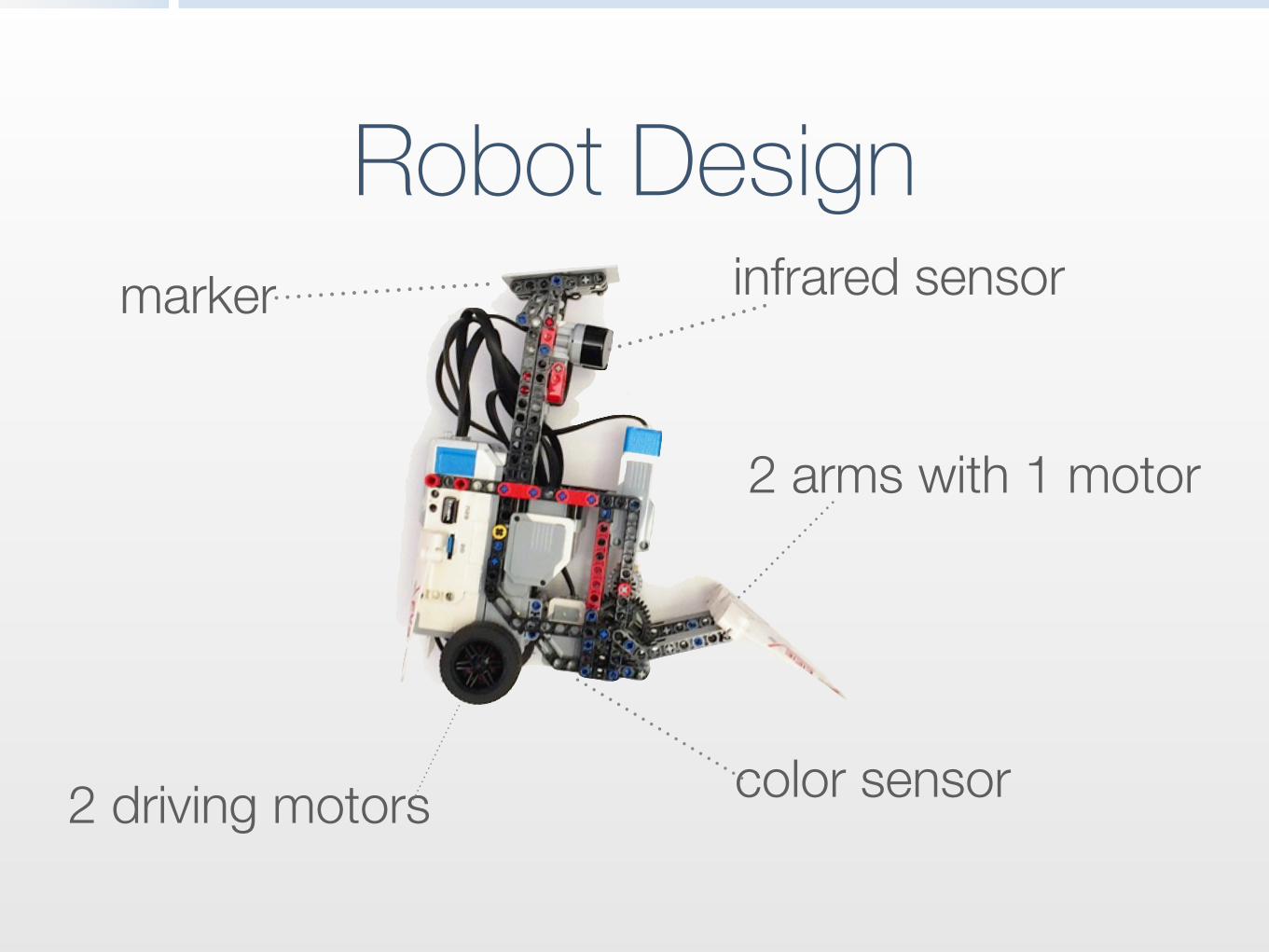
Robot Design
2 driving motors
2 arms with 1 motor
infrared sensor
color sensor
marker
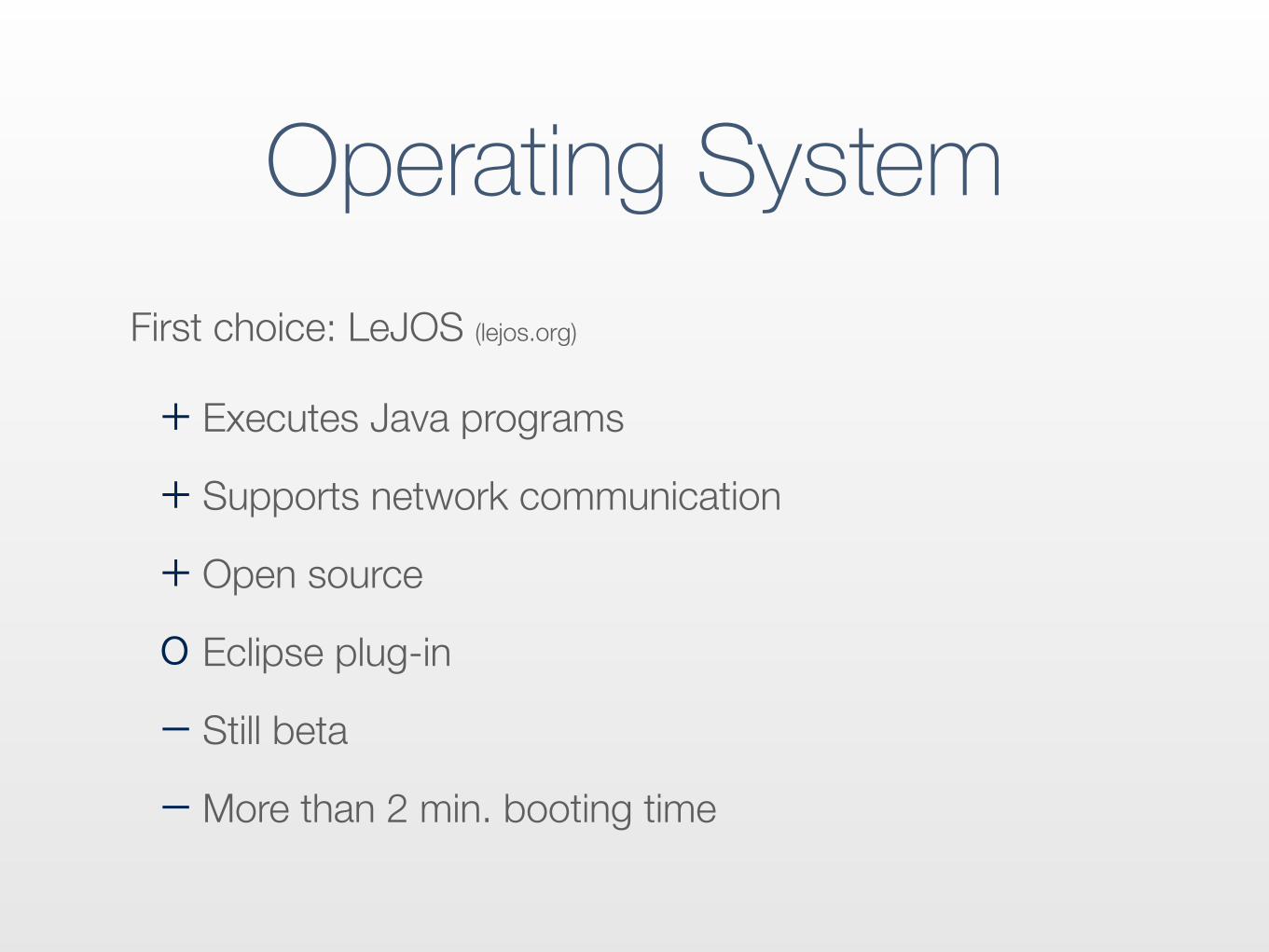
Operating System
+ Executes Java programs
+ Supports network communication
+ Open source
o Eclipse plug-in
− Still beta
− More than 2 min. booting time
First choice: LeJOS (lejos.org)
Robot API
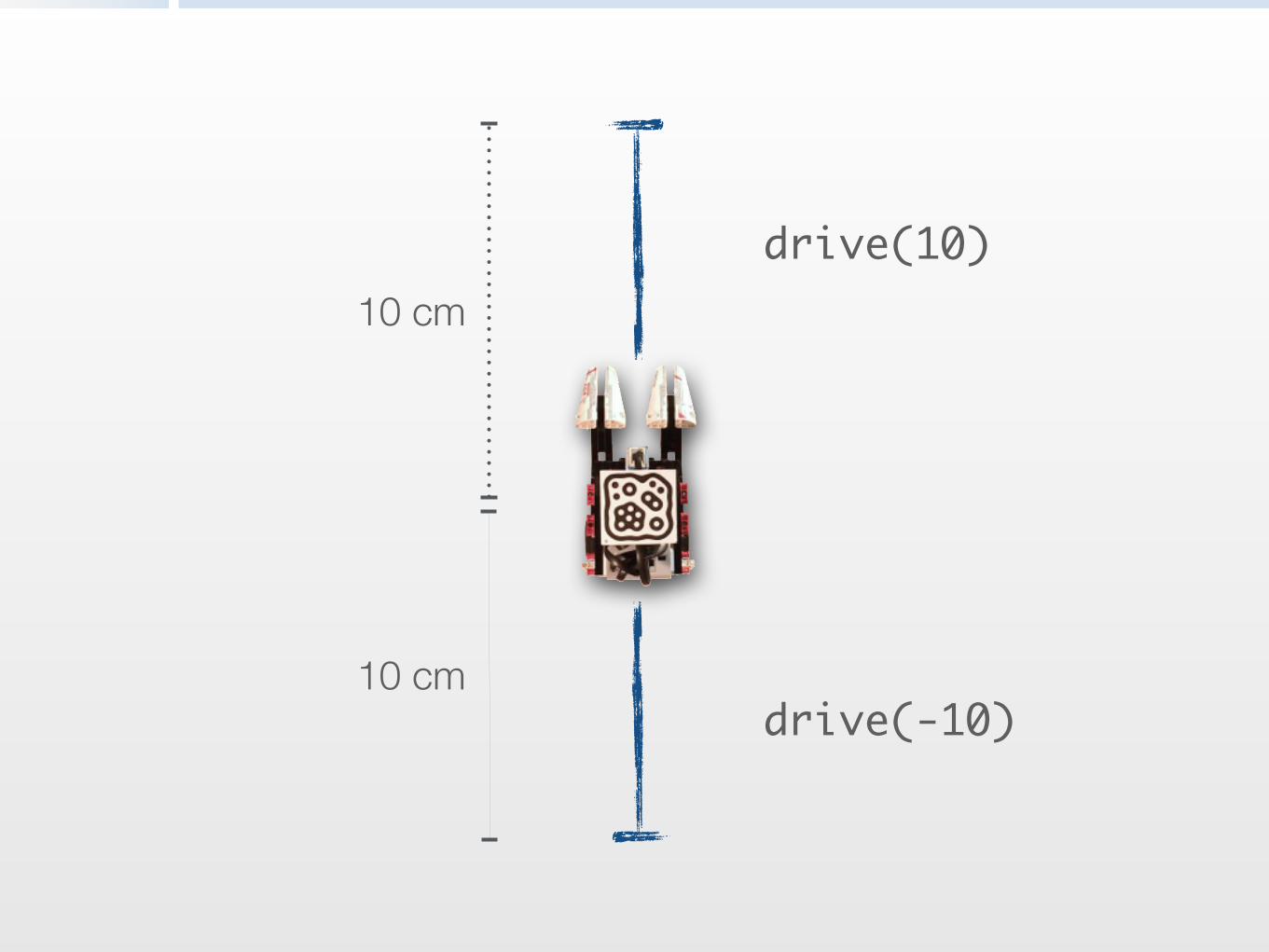
drive(10)
drive(-10)
10 cm
10 cm
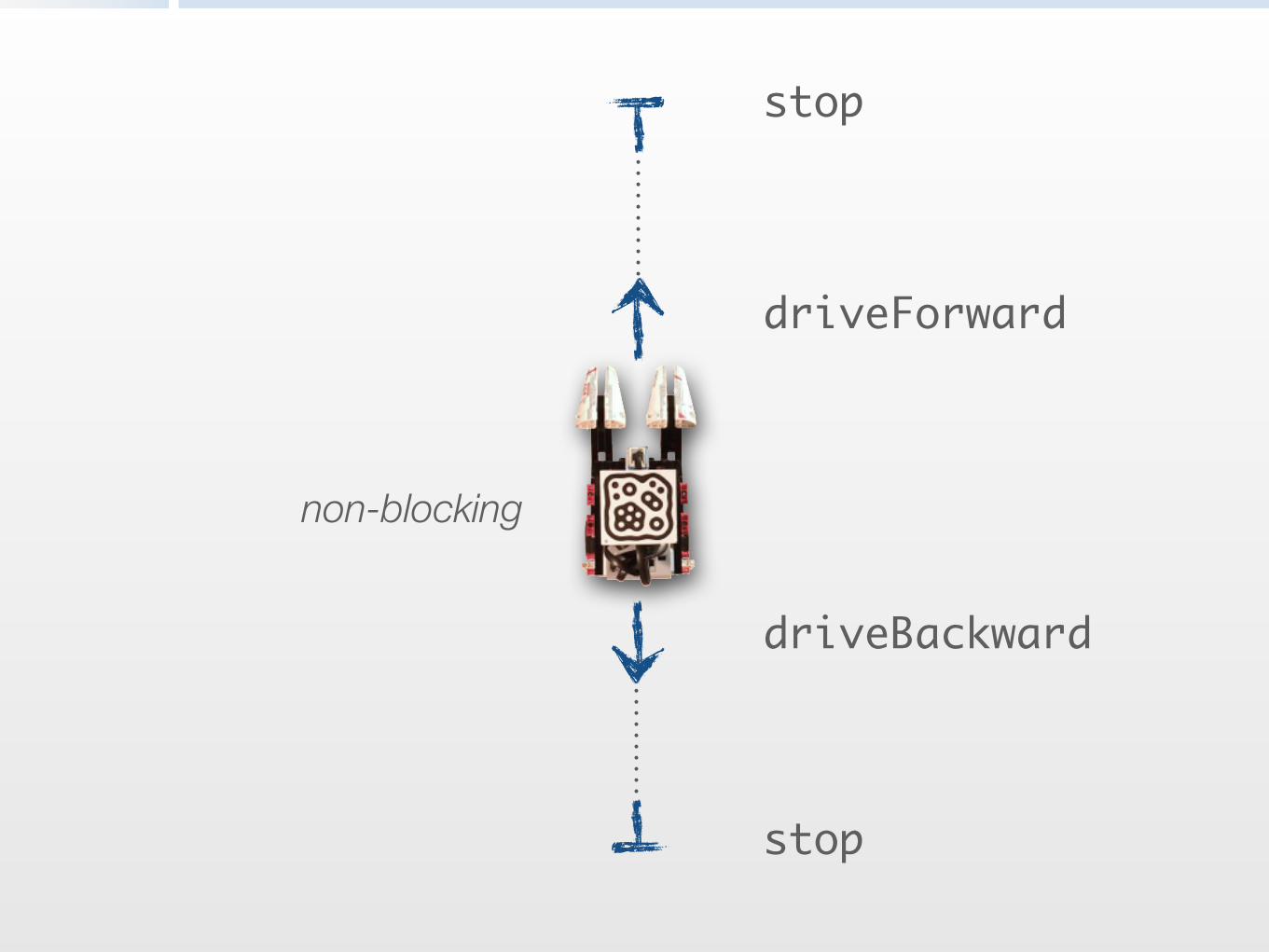
driveForward
driveBackward
non-blocking
stop
stop

rotate(90) rotate(-90)
90° 90°
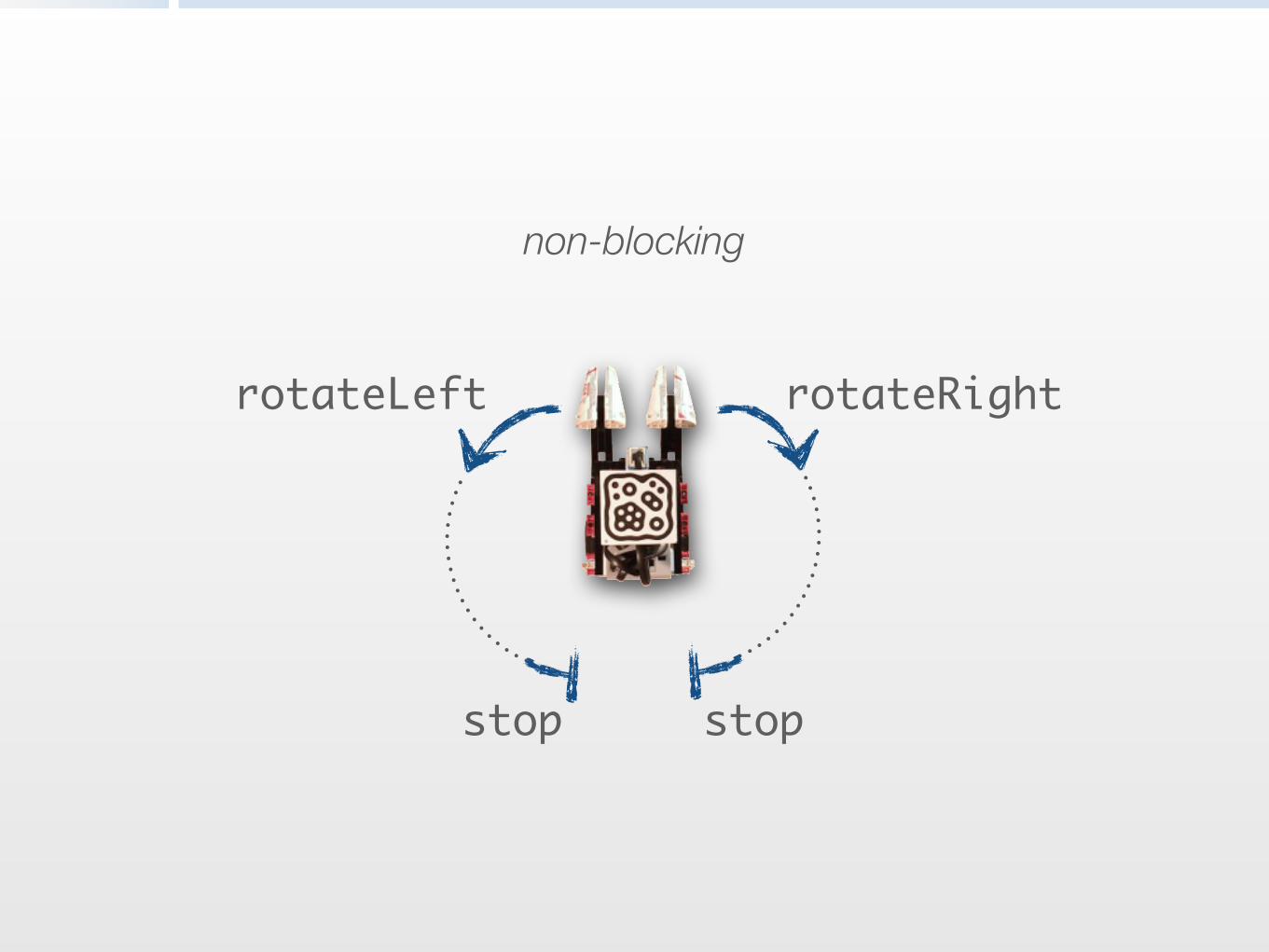
rotateLeft rotateRight
stop stop
non-blocking
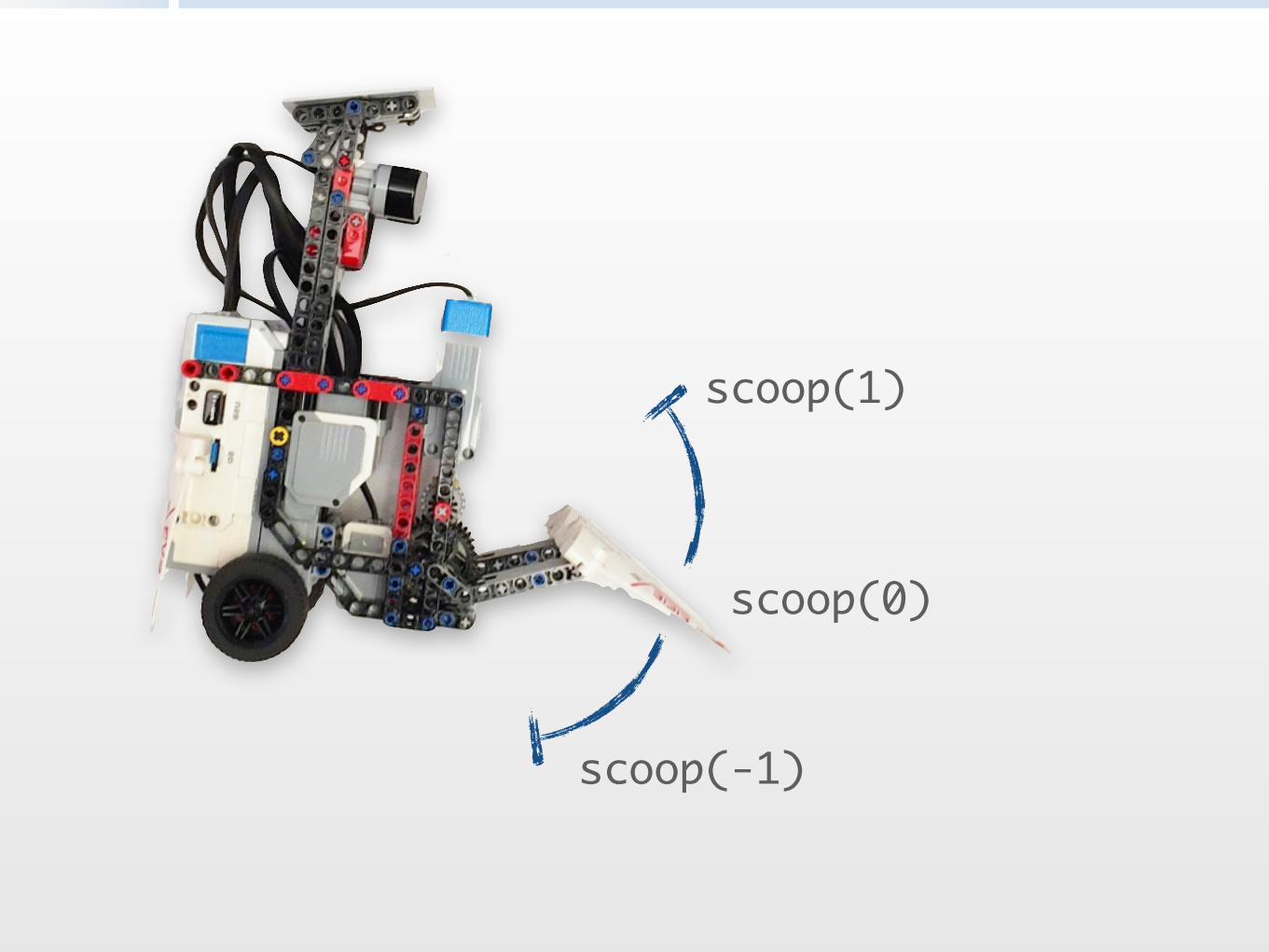
scoop(1)
scoop(-1)
scoop(0)
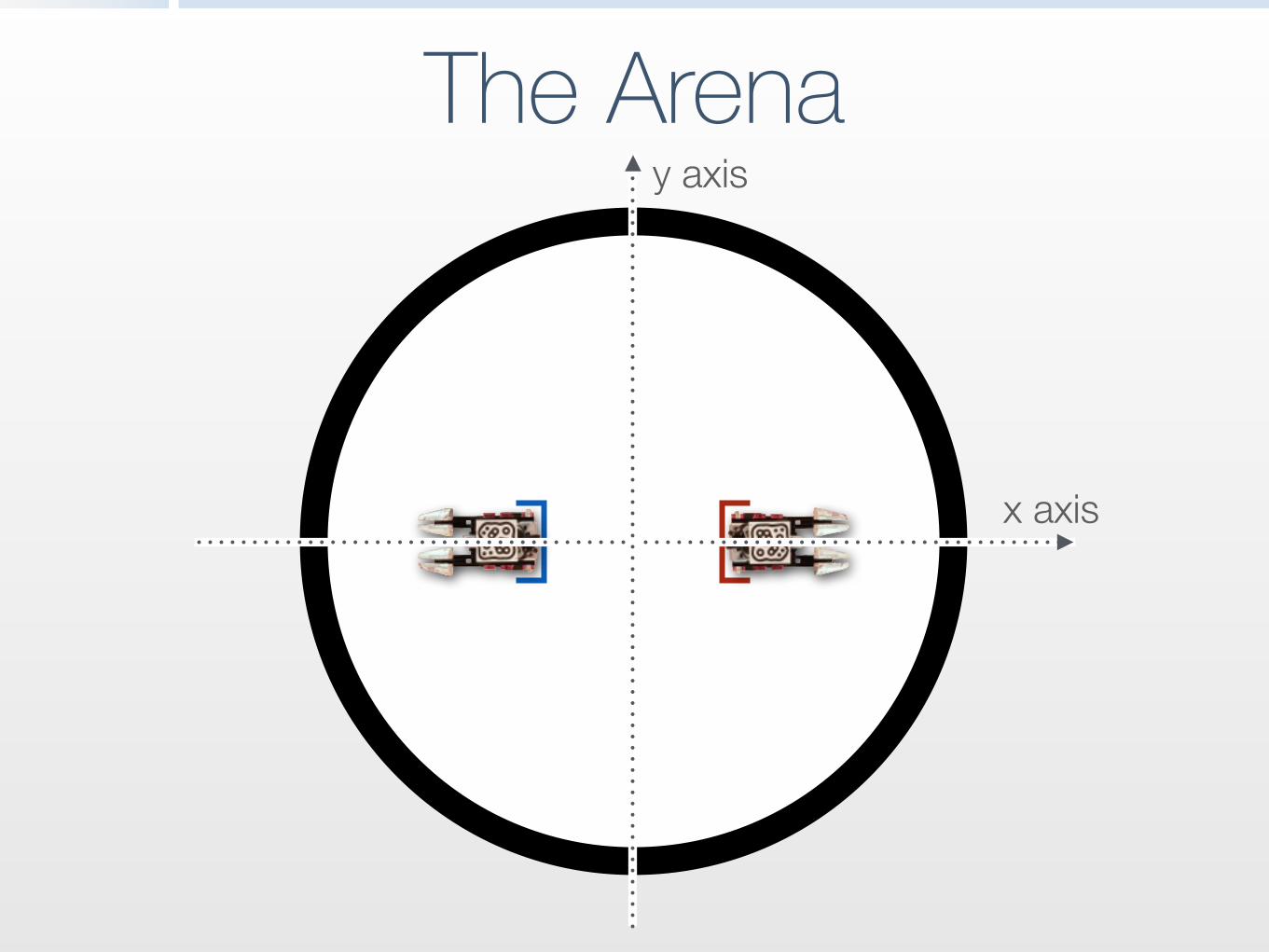
The Arena
x axis
y axis
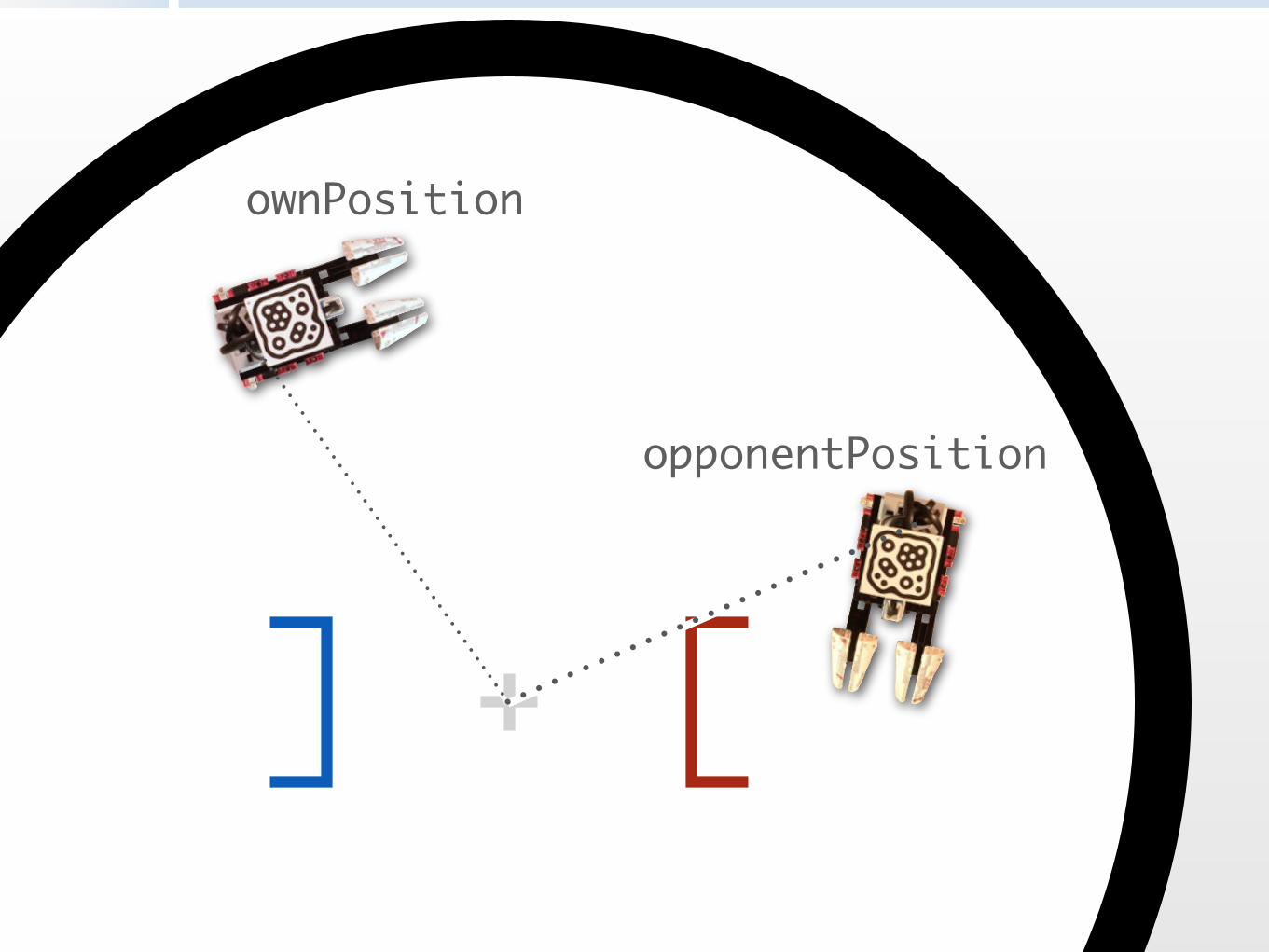
ownPosition
opponentPosition
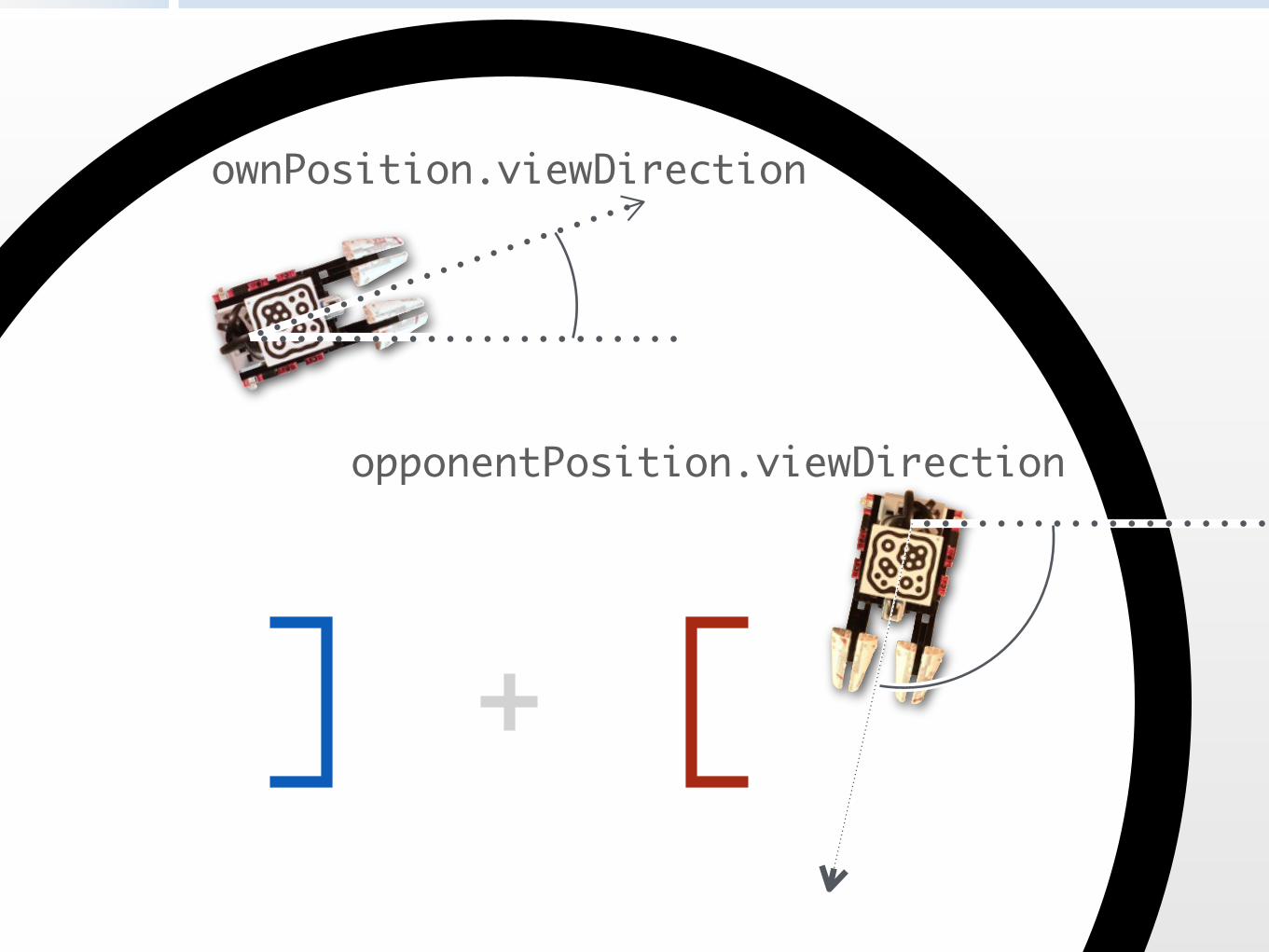
ownPosition.viewDirection
opponentPosition.viewDirection
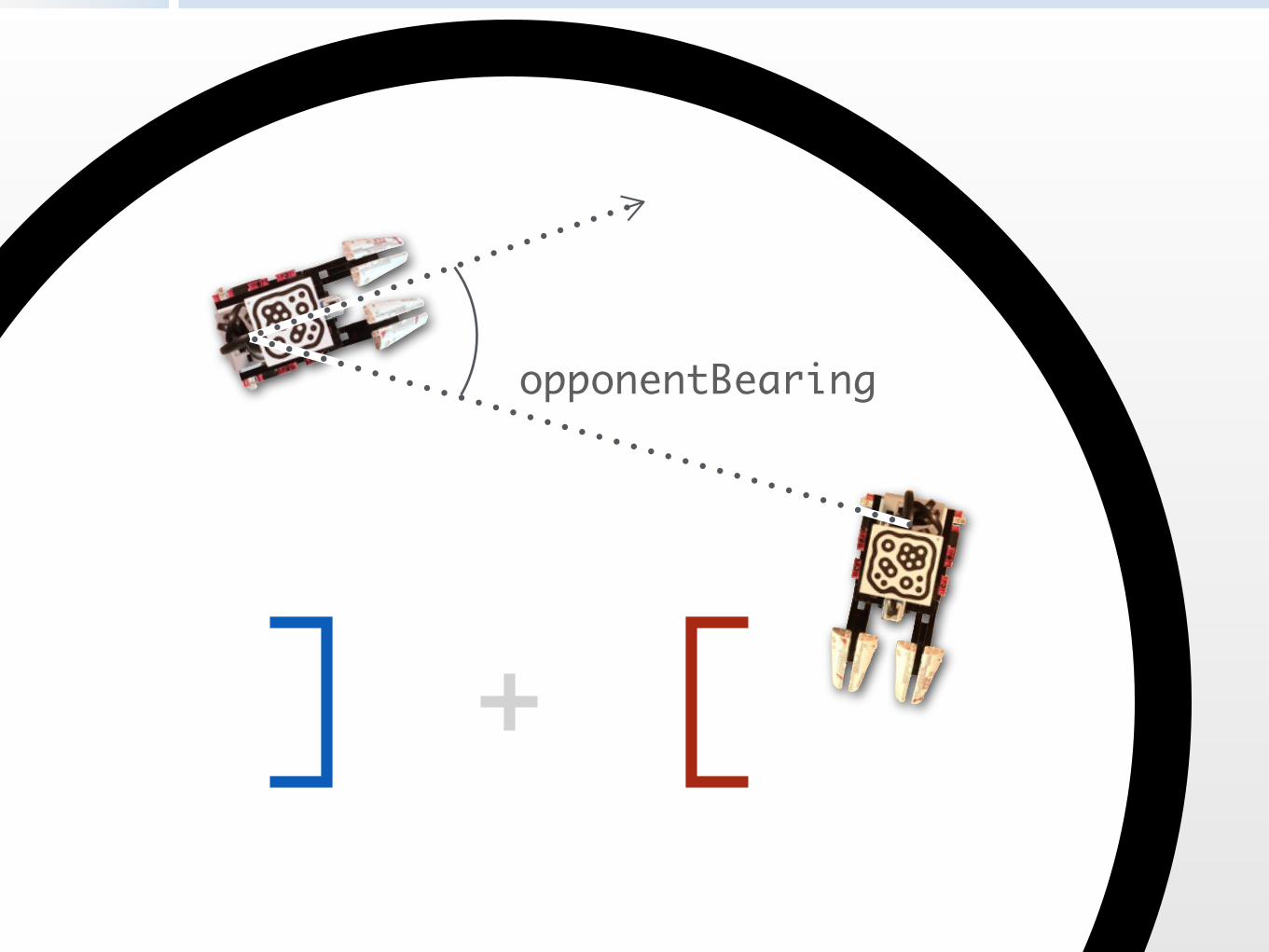
opponentBearing

centerBearing
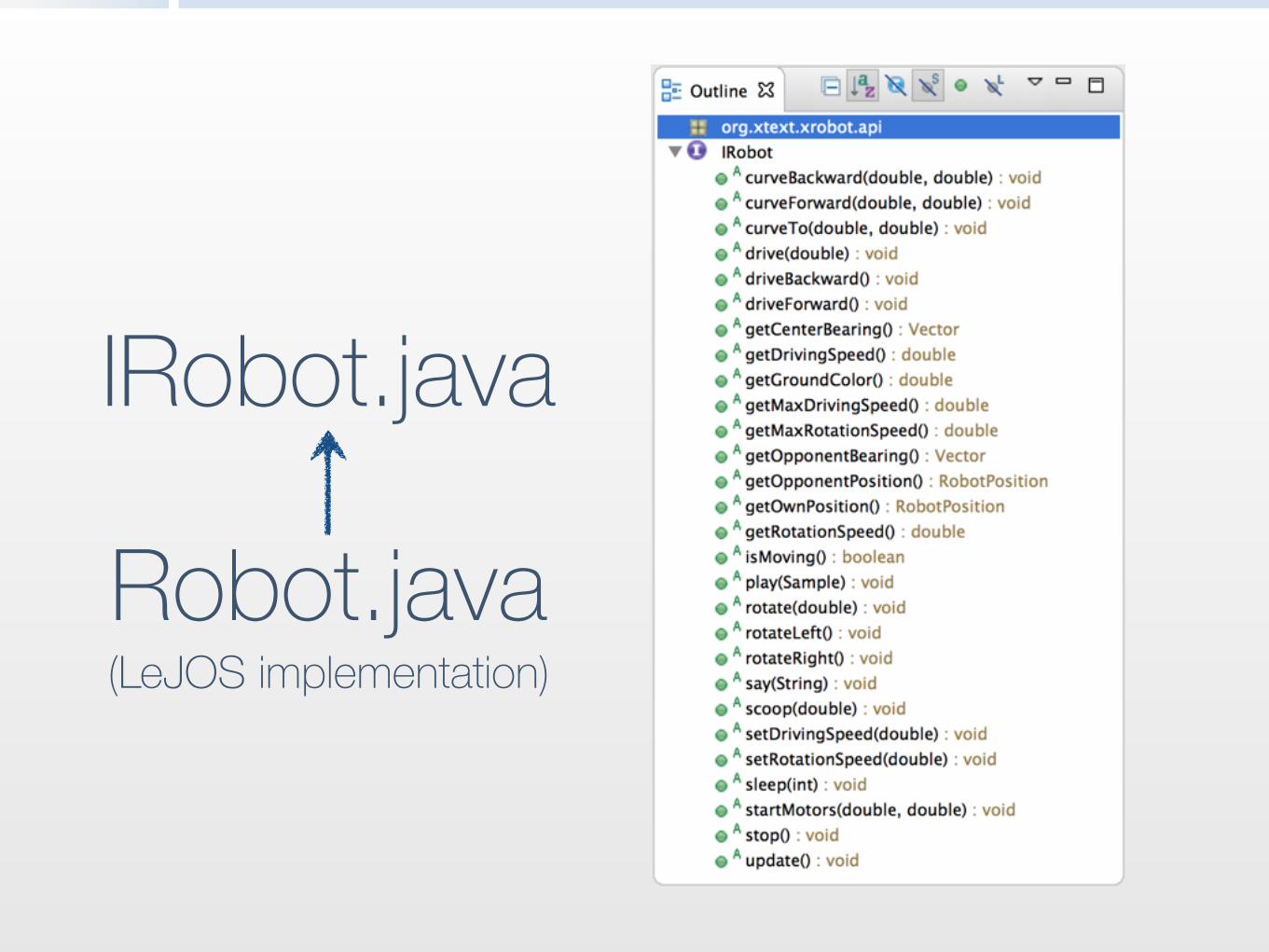
IRobot.java
Robot.java (LeJOS implementation)

Networking
Communication
robots game server
•Keeps the game’s state
•Referee / Security
•Interprets player scripts in a sandbox
•Sends commands to robots
•Receives state from robots
➡Need for very fast communication
Server Side
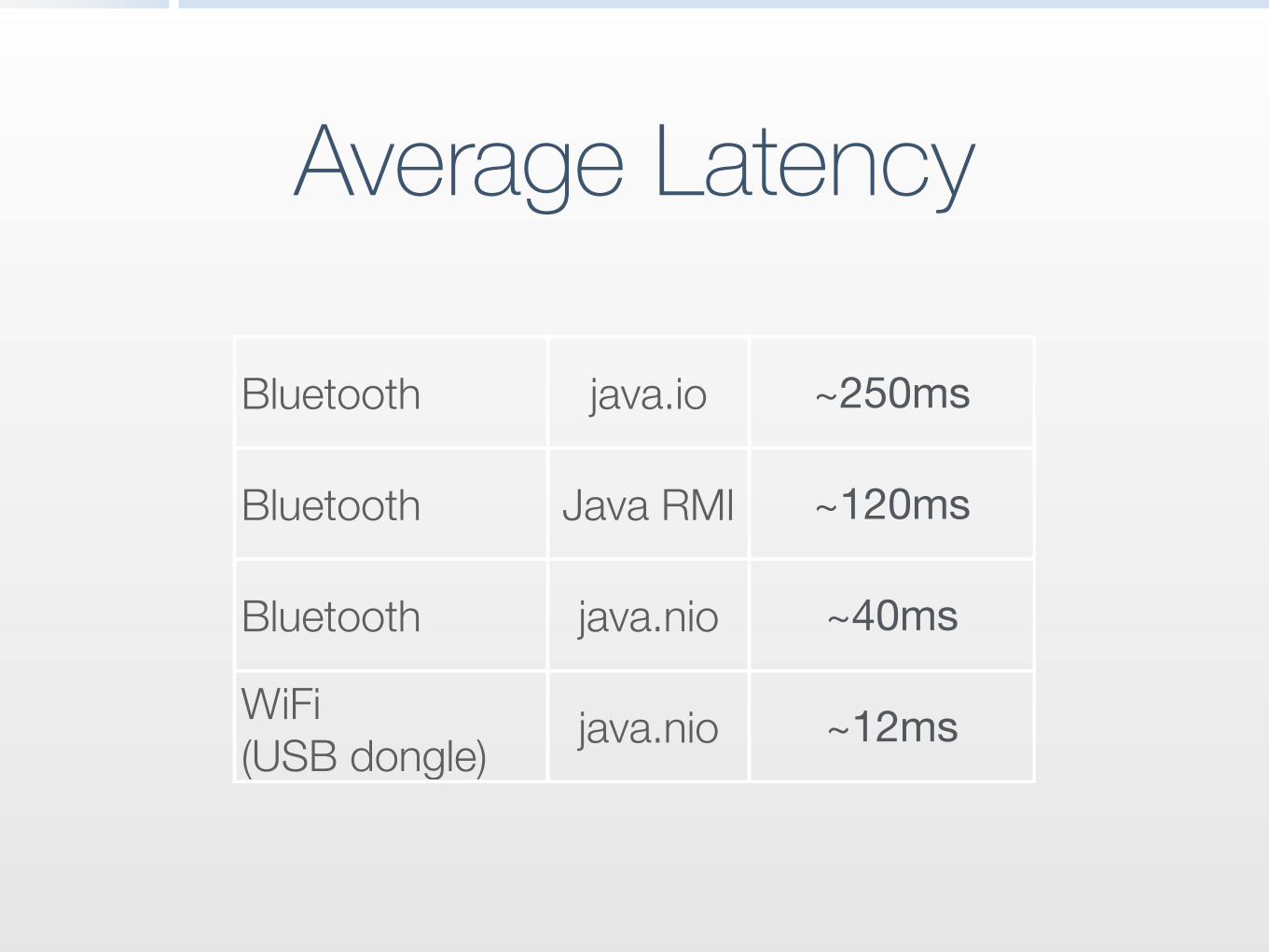
Average Latency
Bluetooth java.io ~250ms
Bluetooth Java RMI ~120ms
Bluetooth java.nio ~40ms
WiFi (USB dongle) java.nio ~12ms
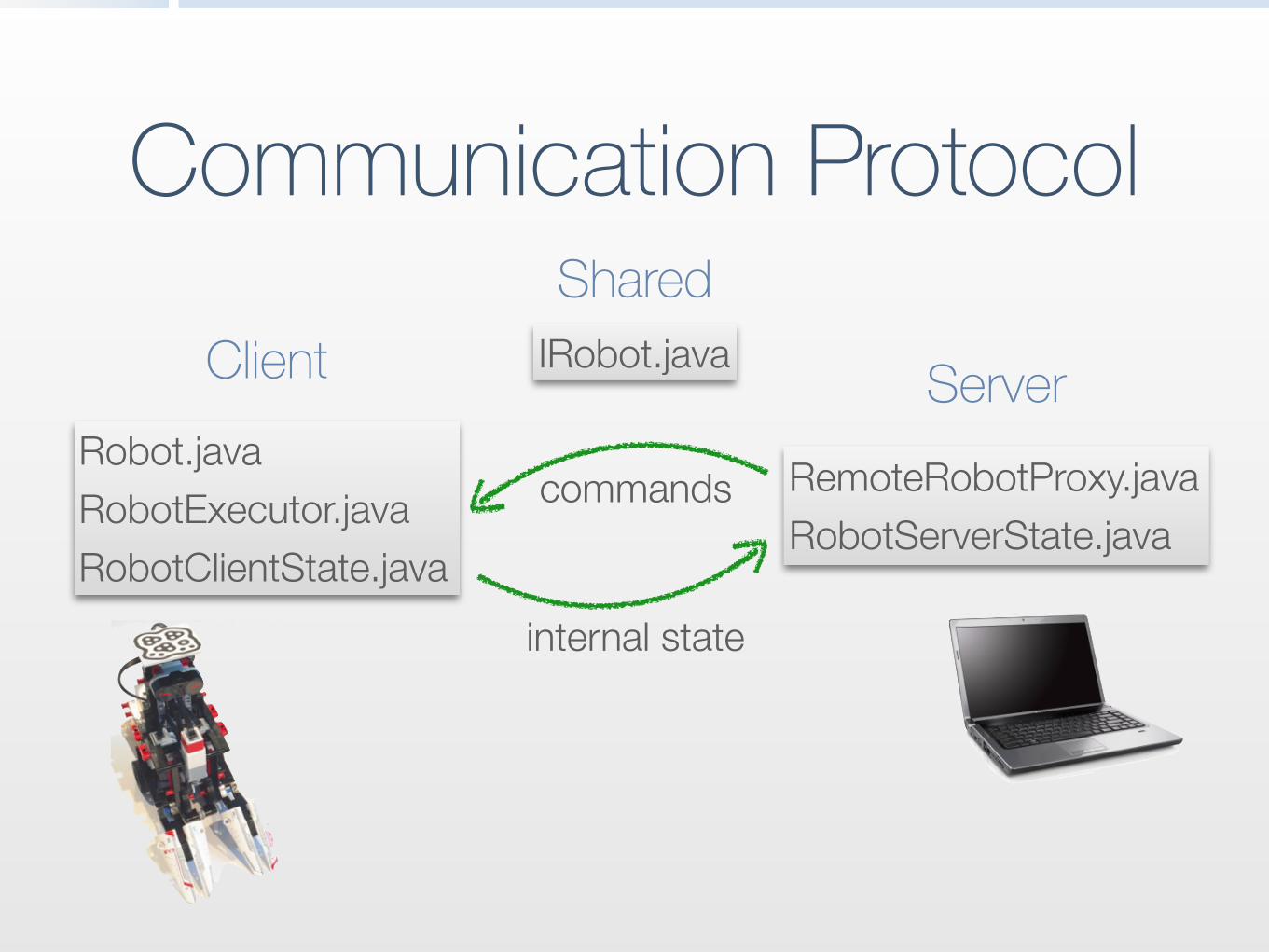
Communication Protocol
Client Server
Shared
Robot.java RobotExecutor.java RobotClientState.java
RemoteRobotProxy.java RobotServerState.java
IRobot.java
internal state
commands
• Programming language based on Java
• Write cleaner code
• Integrated in the Eclipse IDE
• Compiled to Java
• Active Annotations
xtend-lang.org
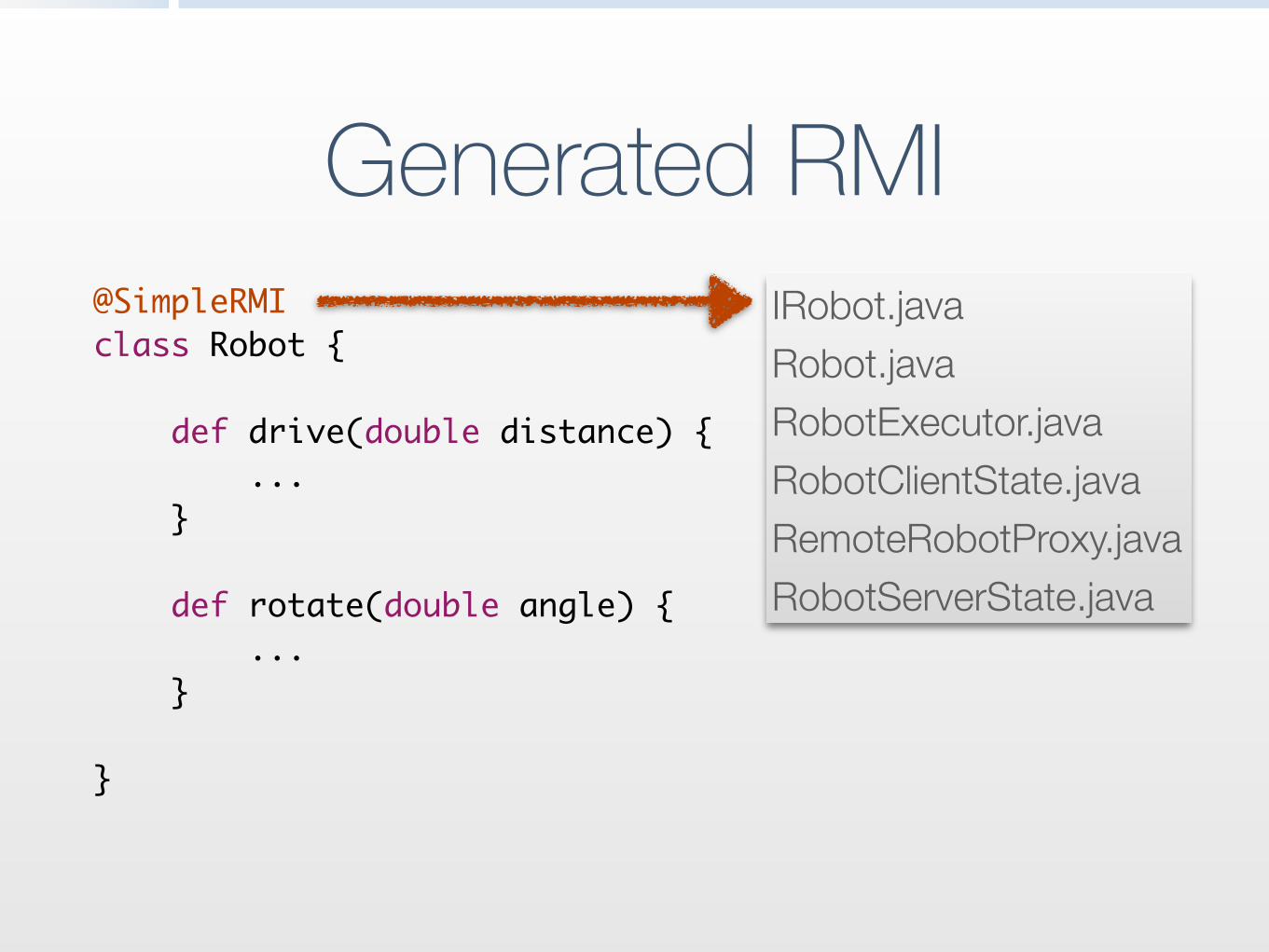
Generated RMI@SimpleRMIclass Robot {! def drive(double distance) { ... }! def rotate(double angle) { ... }!}
IRobot.java Robot.java RobotExecutor.java RobotClientState.java RemoteRobotProxy.java RobotServerState.java
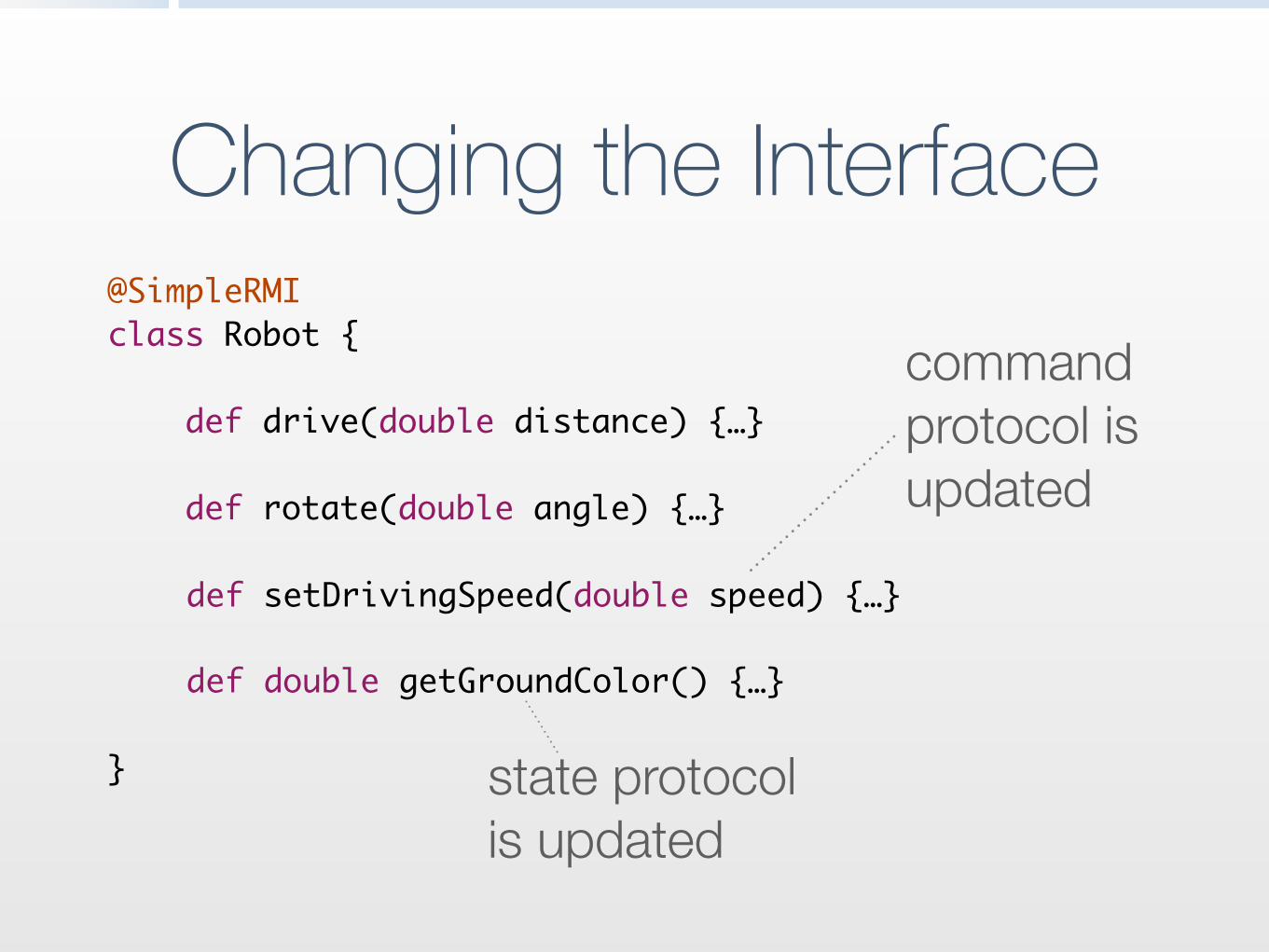
Changing the Interface@SimpleRMIclass Robot {! def drive(double distance) {…}! def rotate(double angle) {…}!!!!!}
def setDrivingSpeed(double speed) {…}
def double getGroundColor() {…}
command protocol is updated
state protocol is updated

Scripting
• Define your own language
• Xtext generates a text editor with syntax highlighting, code completion, error markers, etc.
• Add a code generator or interpreter
xtext.org

An XRobots Scriptrobot 'Hello, World!'author Miro!TurnToOpponent on opponentBearing.length > 35 { rotate(opponentBearing.angle) drive(10)}!Destroy { if (abs(opponentBearing.angle) < 90) drive(100) else drive(-100)}
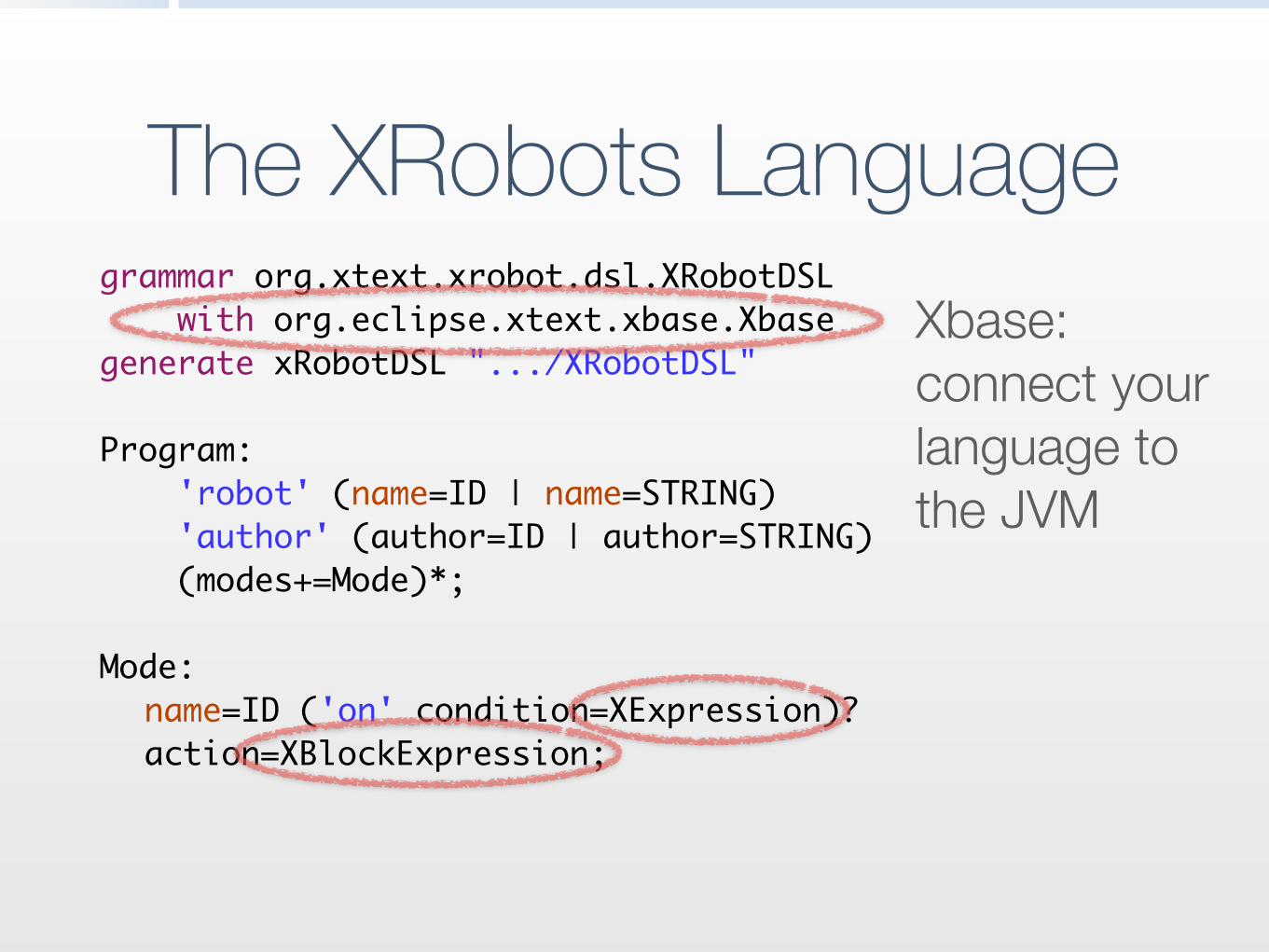
The XRobots Languagegrammar org.xtext.xrobot.dsl.XRobotDSL with org.eclipse.xtext.xbase.Xbasegenerate xRobotDSL ".../XRobotDSL"!Program: 'robot' (name=ID | name=STRING) 'author' (author=ID | author=STRING) (modes+=Mode)*;!Mode: name=ID ('on' condition=XExpression)? action=XBlockExpression;
Xbase: connect your language to the JVM
XRobots &
• Can use all expressions of Xtend
• A Program instance is mapped to a class implementing IRobot
• Can access all methods of IRobot: drive(double), rotate(double), etc.
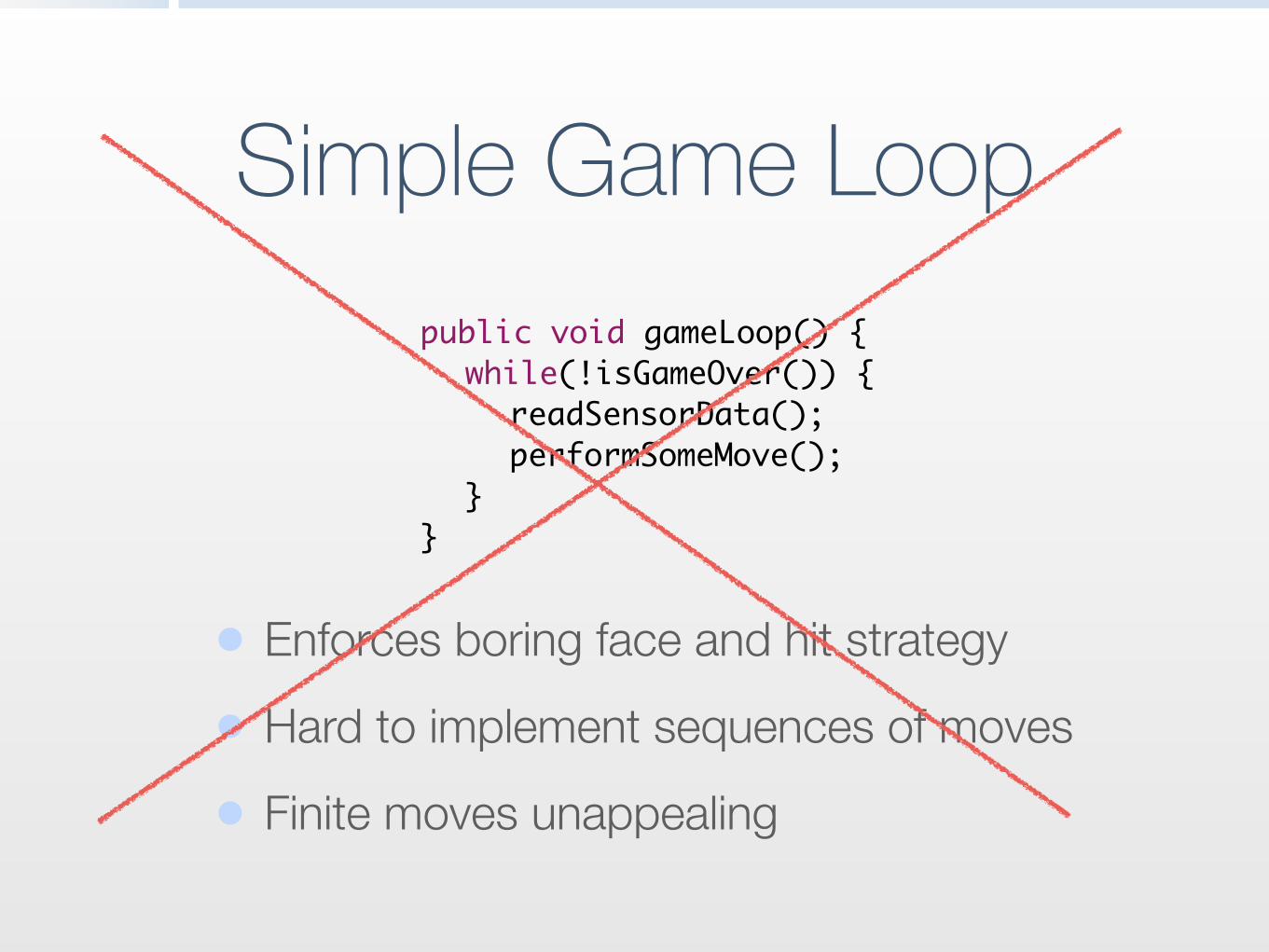
Simple Game Loop public void gameLoop() { while(!isGameOver()) { readSensorData(); performSomeMove(); } }
• Enforces boring face and hit strategy
• Hard to implement sequences of moves
• Finite moves unappealing

Execution Model• Mode conditions are checked periodically
• The first mode with satisfied condition is the active mode
• If the active mode changes, the previous mode is canceled
• Cancellation is built into the runtime
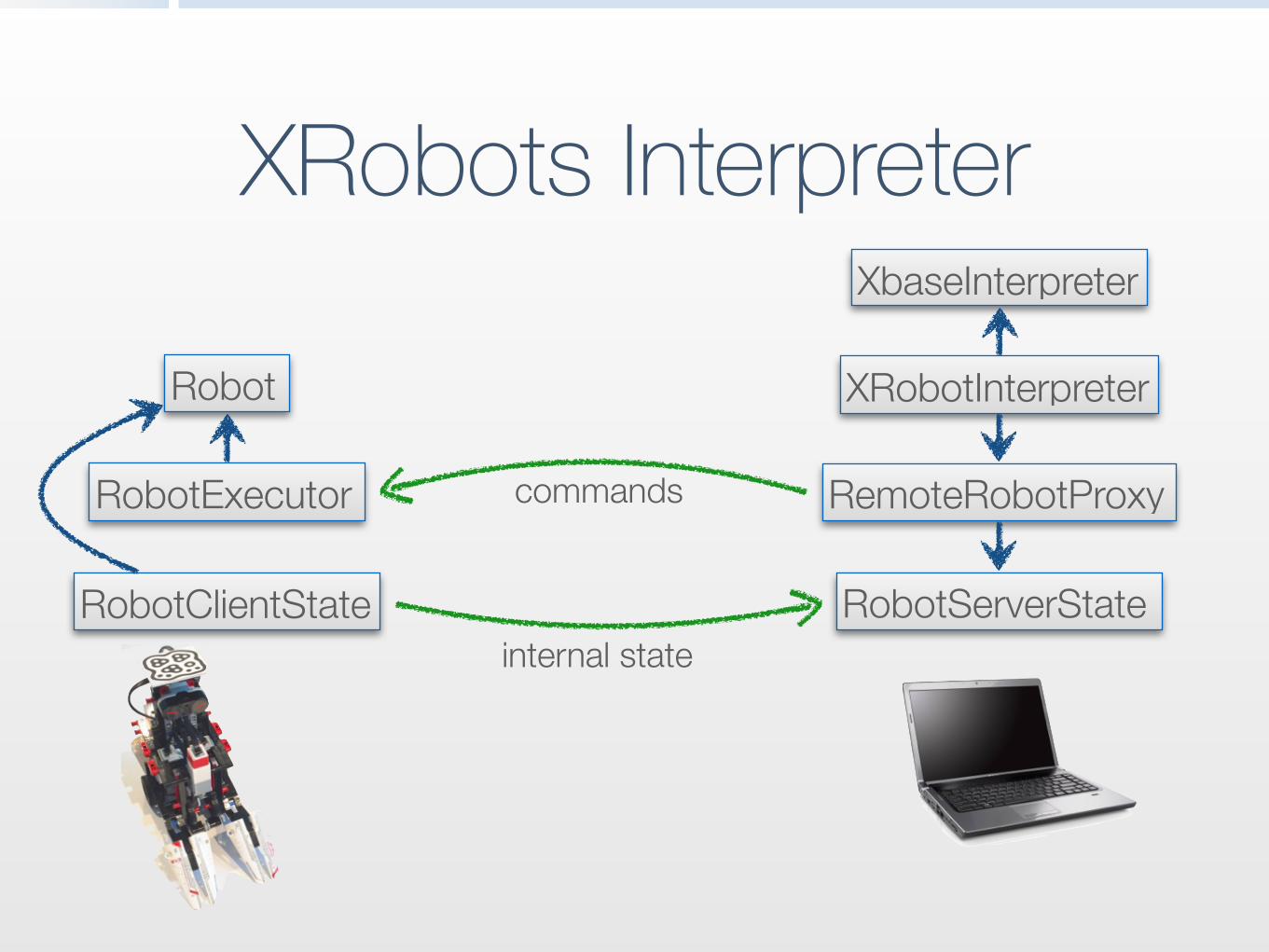
XRobots Interpreter
RobotExecutor
XRobotInterpreter
internal state
commands
RobotClientState
RemoteRobotProxy
RobotServerState
XbaseInterpreter
Robot
Robot Vision

Infrared Sensor
Sender Receiverdetects angle (± 40°) and distance
lego.comlego.com
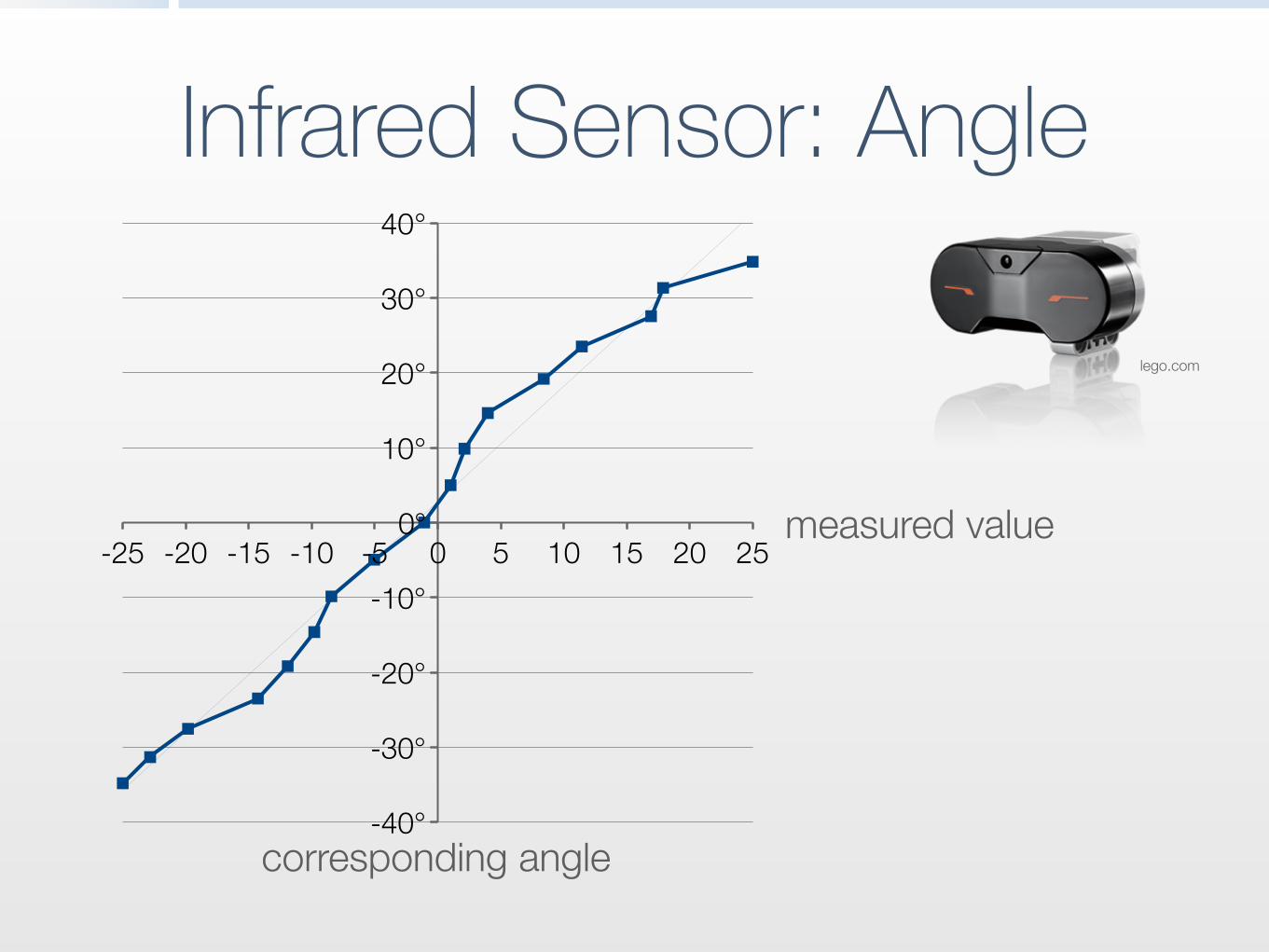
Infrared Sensor: Angle
-25 -20 -15 -10 -5 0 5 10 15 20 25
-40°
-30°
-20°
-10°
0°
10°
20°
30°
40°
-25.00 -20.00 -15.00 -10.00 -5.00 0.00 5.00 10.00 15.00 20.00 25.00
-40.00
-30.00
-20.00
-10.00
0.00
10.00
20.00
30.00
40.00
f(x) = 1.6981305442x + 3.3567996758
measured value
corresponding angle
lego.com
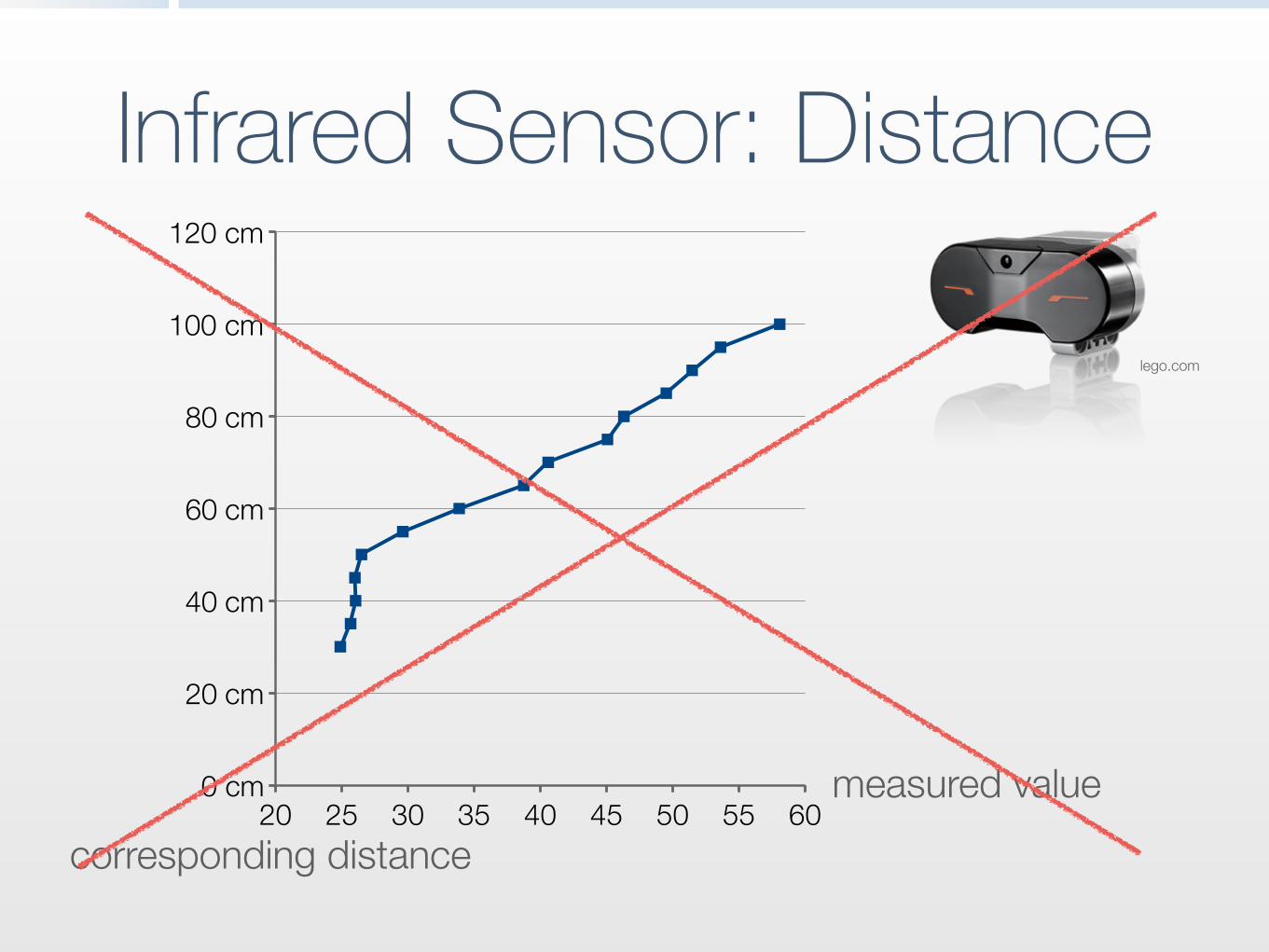
Infrared Sensor: DistanceCharts
Page 1
20 25 30 35 40 45 50 55 60
0 cm
20 cm
40 cm
60 cm
80 cm
100 cm
120 cm
measured valuecorresponding distance
lego.com
Image RecognitionImage processing library: OpenCV (opencv.org)
+ Read and process camera images + Very fast + Open source − Image recognition methods are quite fuzzy
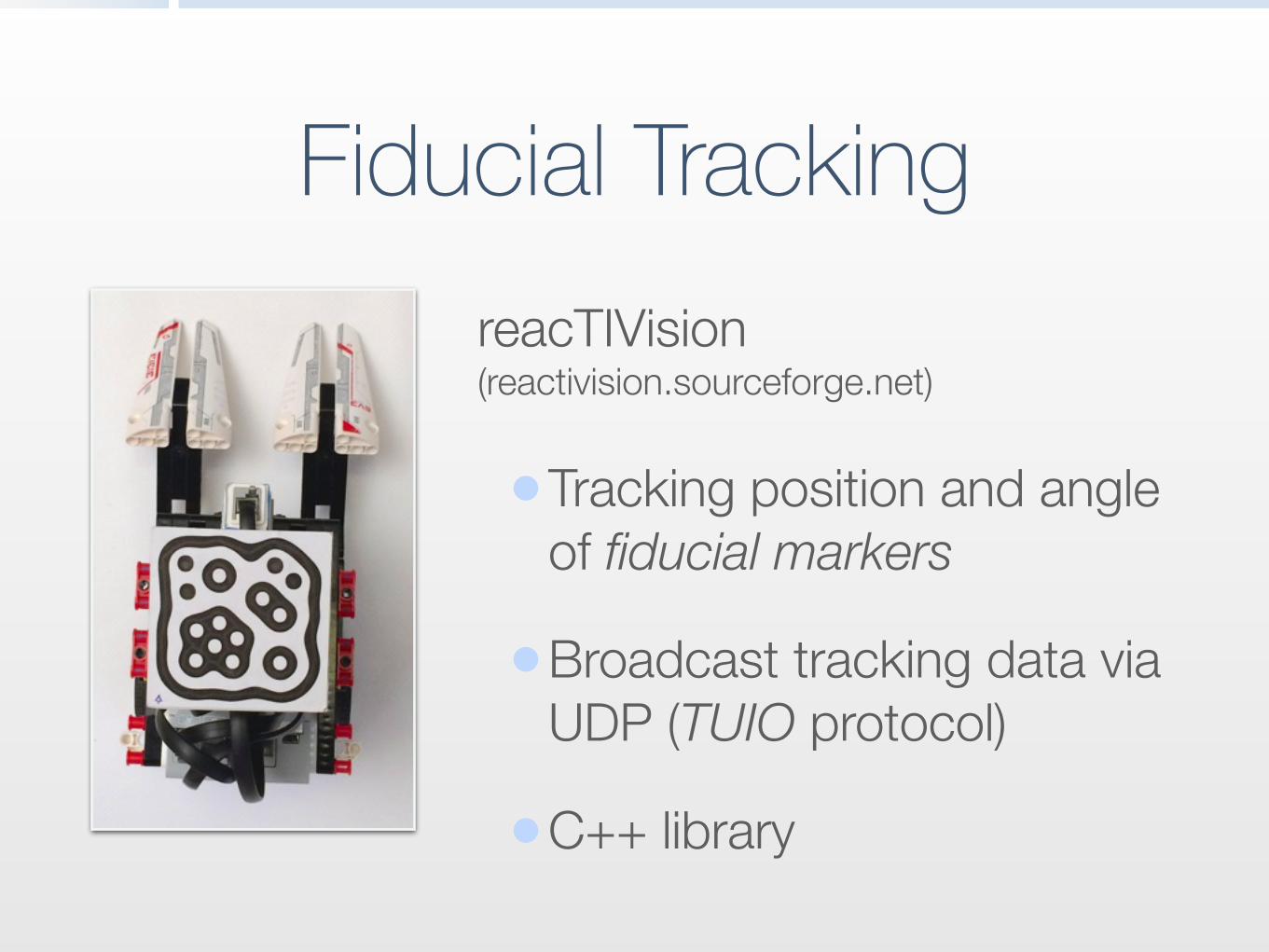
Fiducial TrackingreacTIVision (reactivision.sourceforge.net)
•Tracking position and angle of fiducial markers
•Broadcast tracking data via UDP (TUIO protocol)
•C++ library
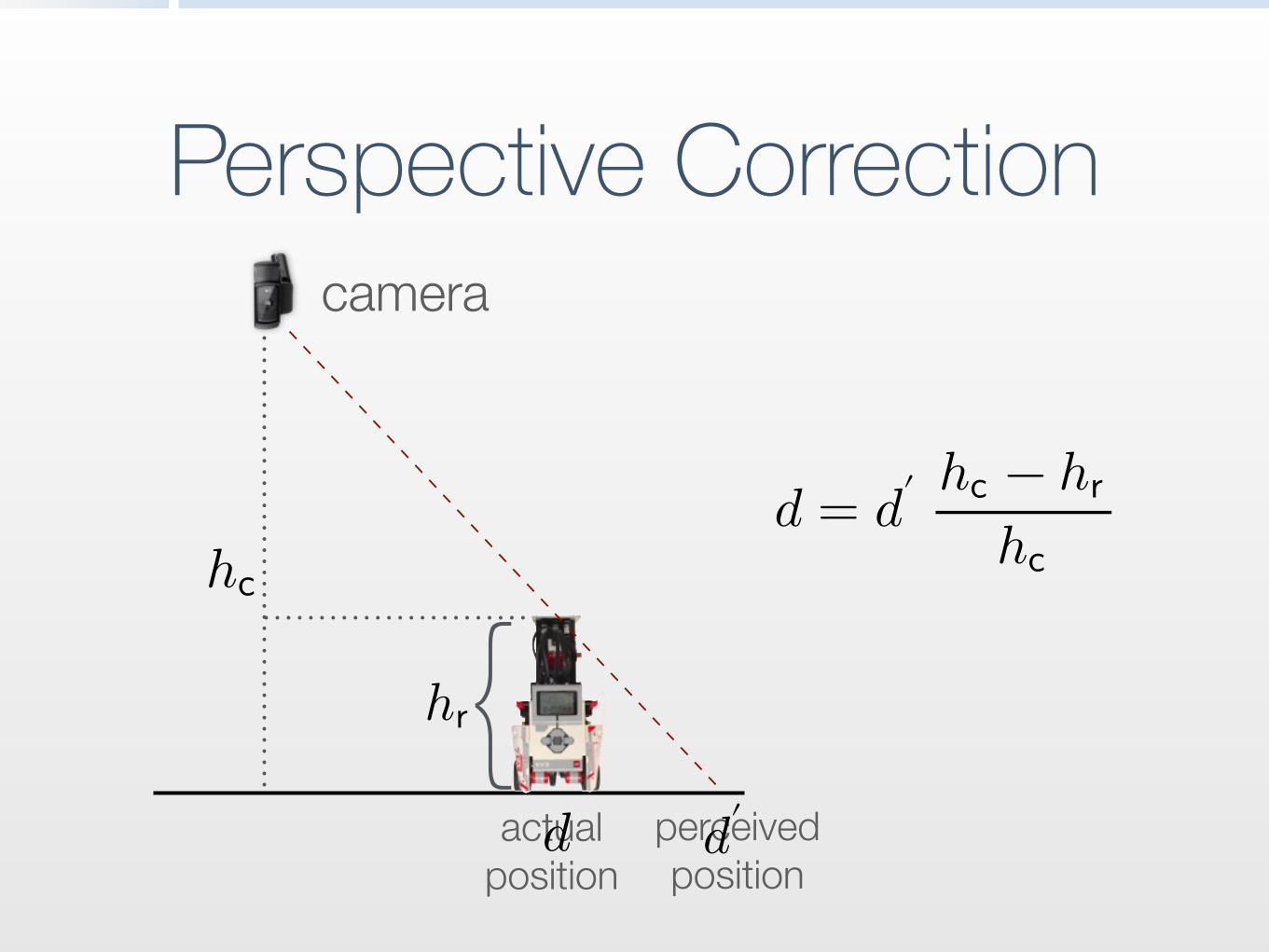
Perspective Correctioncamera
actual position
perceived position
{

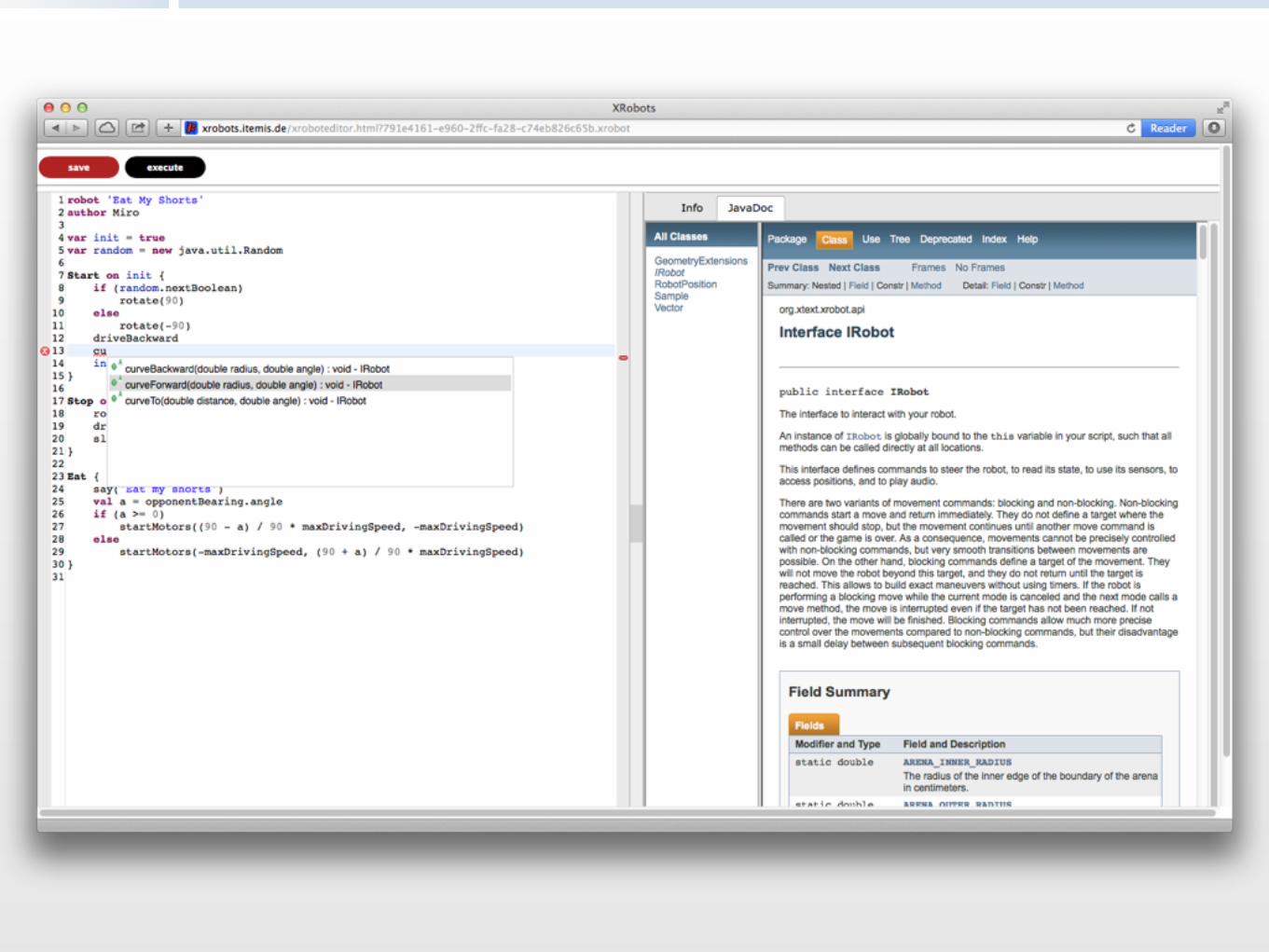
Web Editor
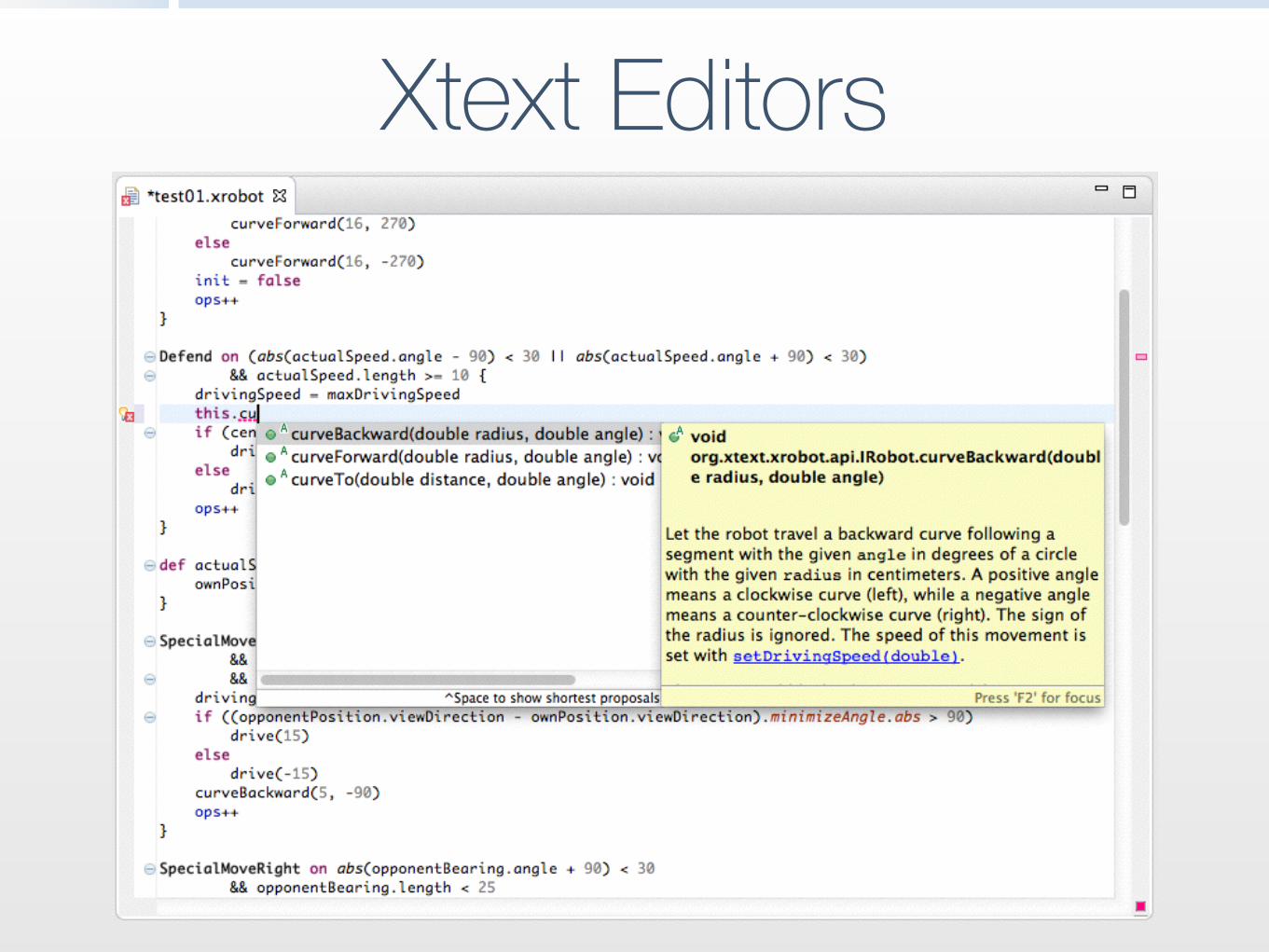
Xtext Editors
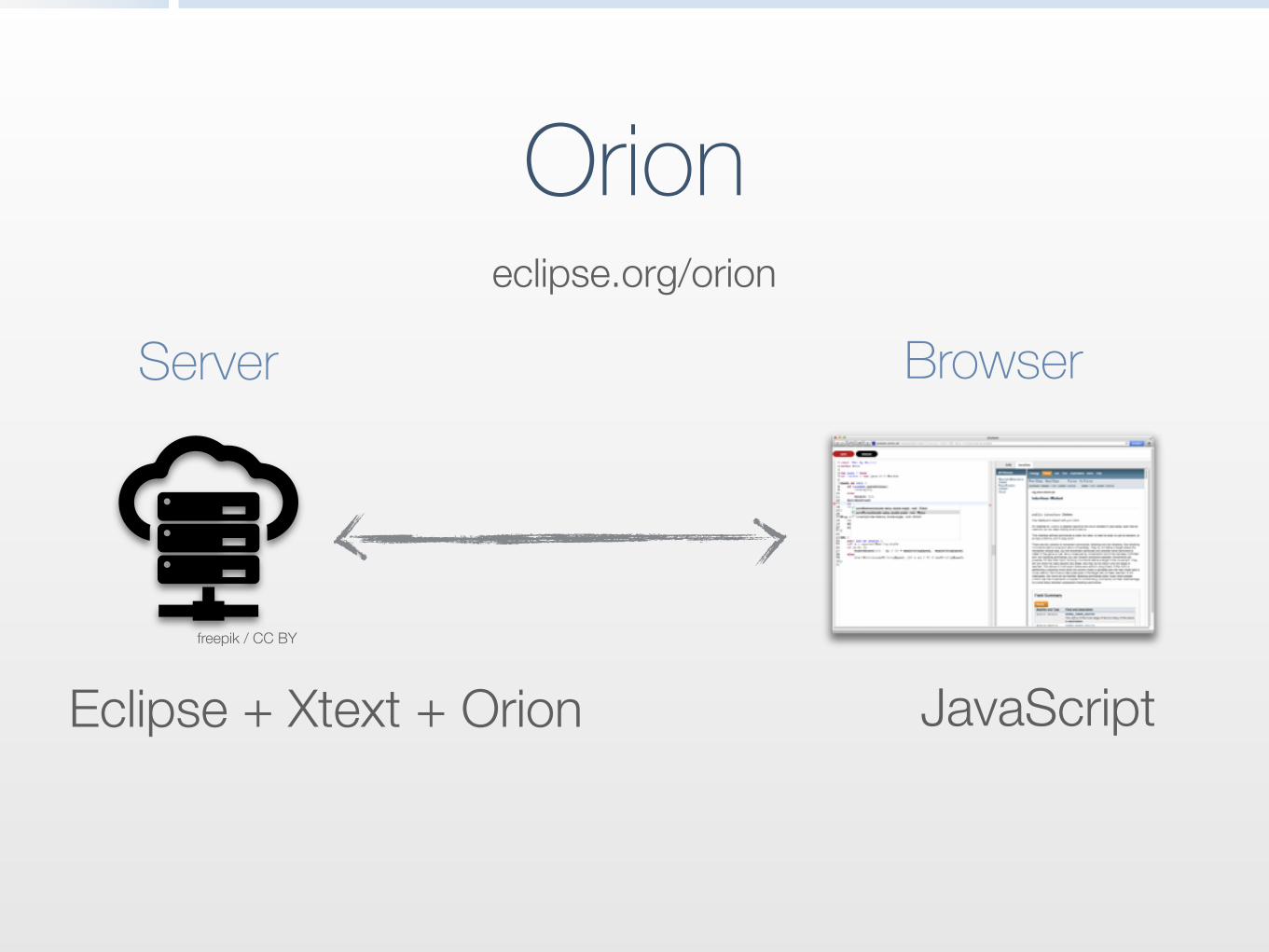
Orion
freepik / CC BY
Server Browser
Eclipse + Xtext + Orion JavaScript
eclipse.org/orion
XRobots in the Web
• Click the button → server generates a script file
• Browser communicates with server for text coloring, code completion, error markers, etc.
xrobots.itemis.de
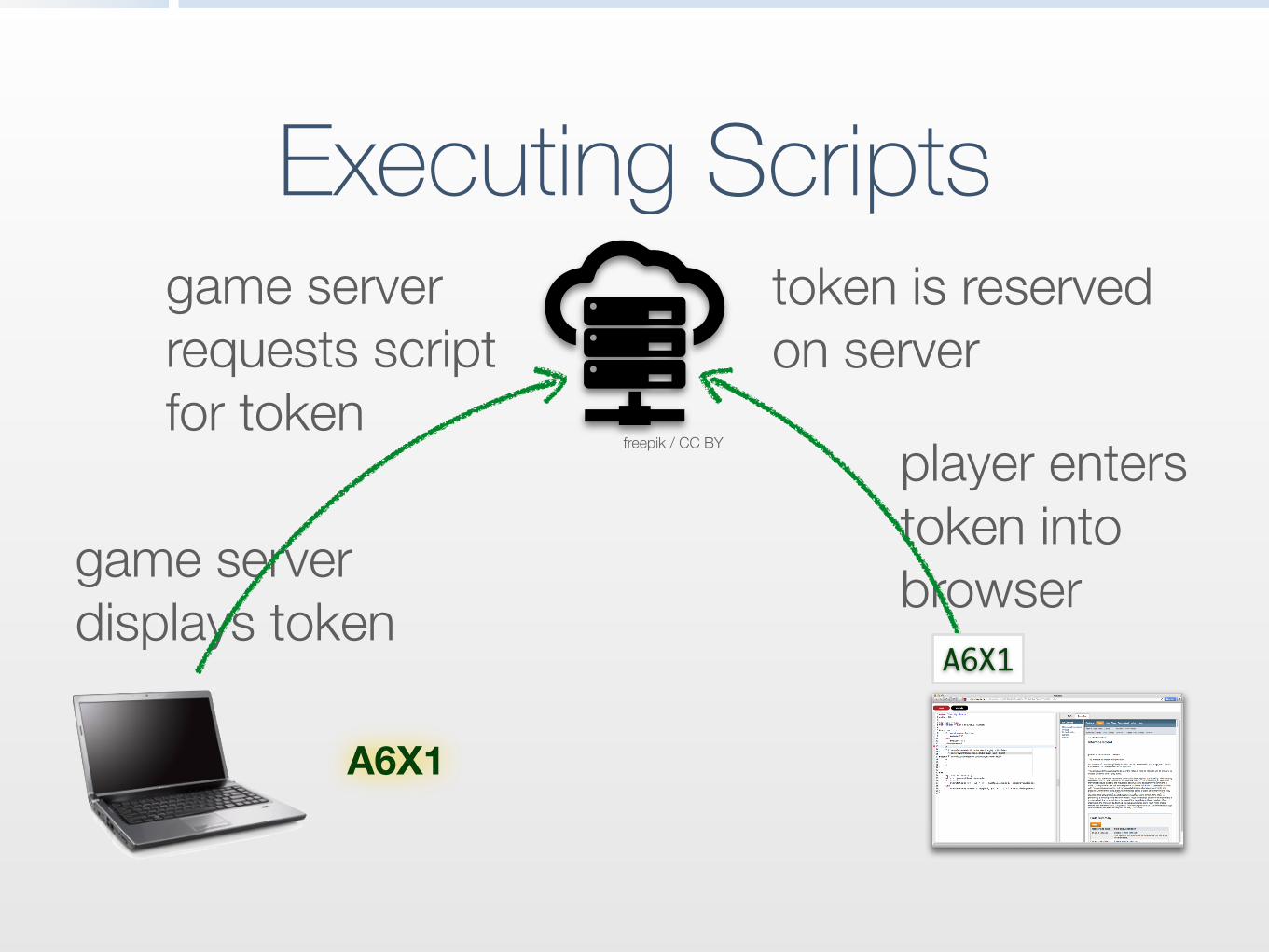
Executing Scripts
freepik / CC BY
game server displays token
A6X1
player enters token into browser
token is reserved on server
A6X1
game server requests script for token
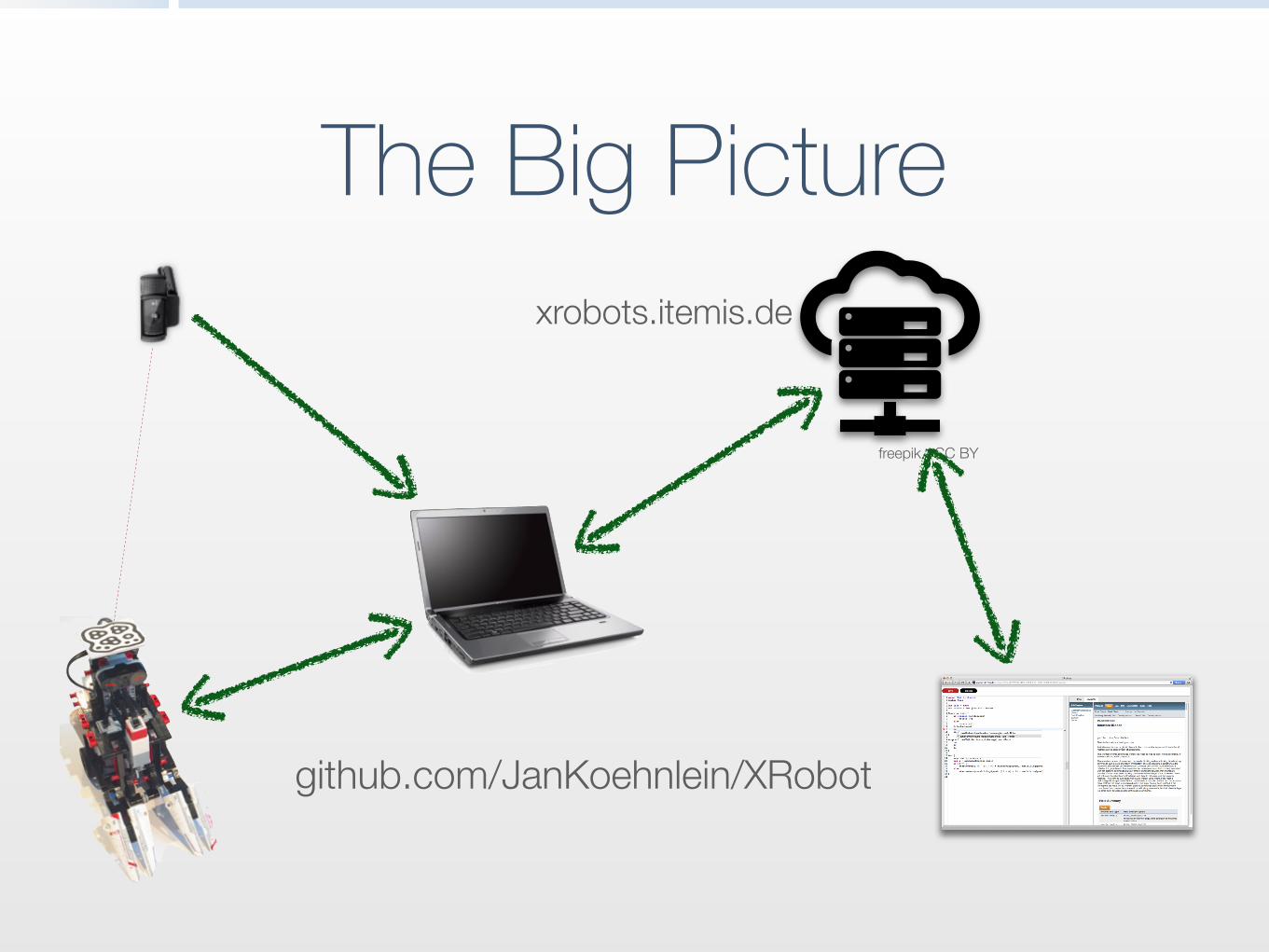
The Big Picture
freepik / CC BY
xrobots.itemis.de
github.com/JanKoehnlein/XRobot
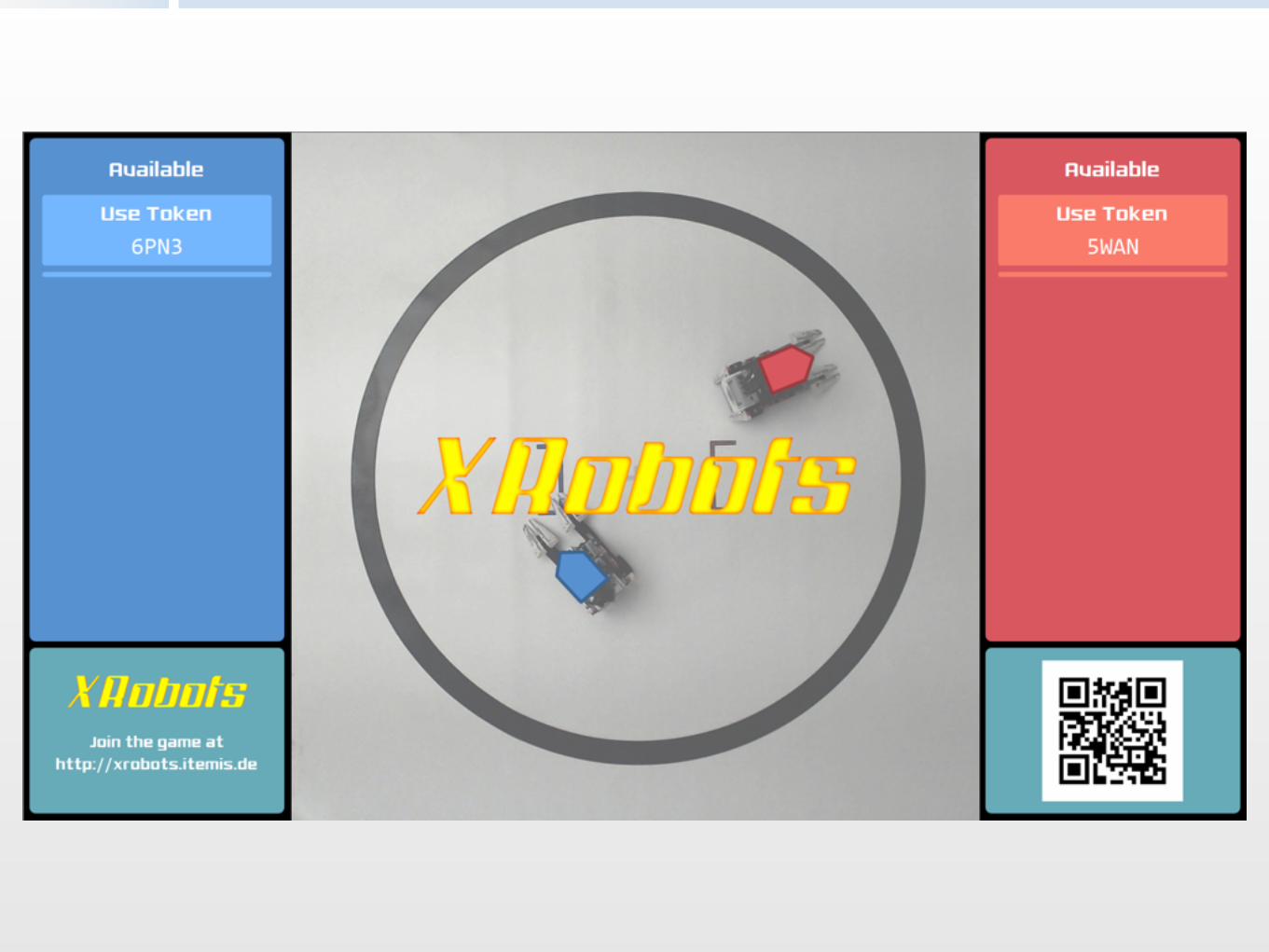
Server Display
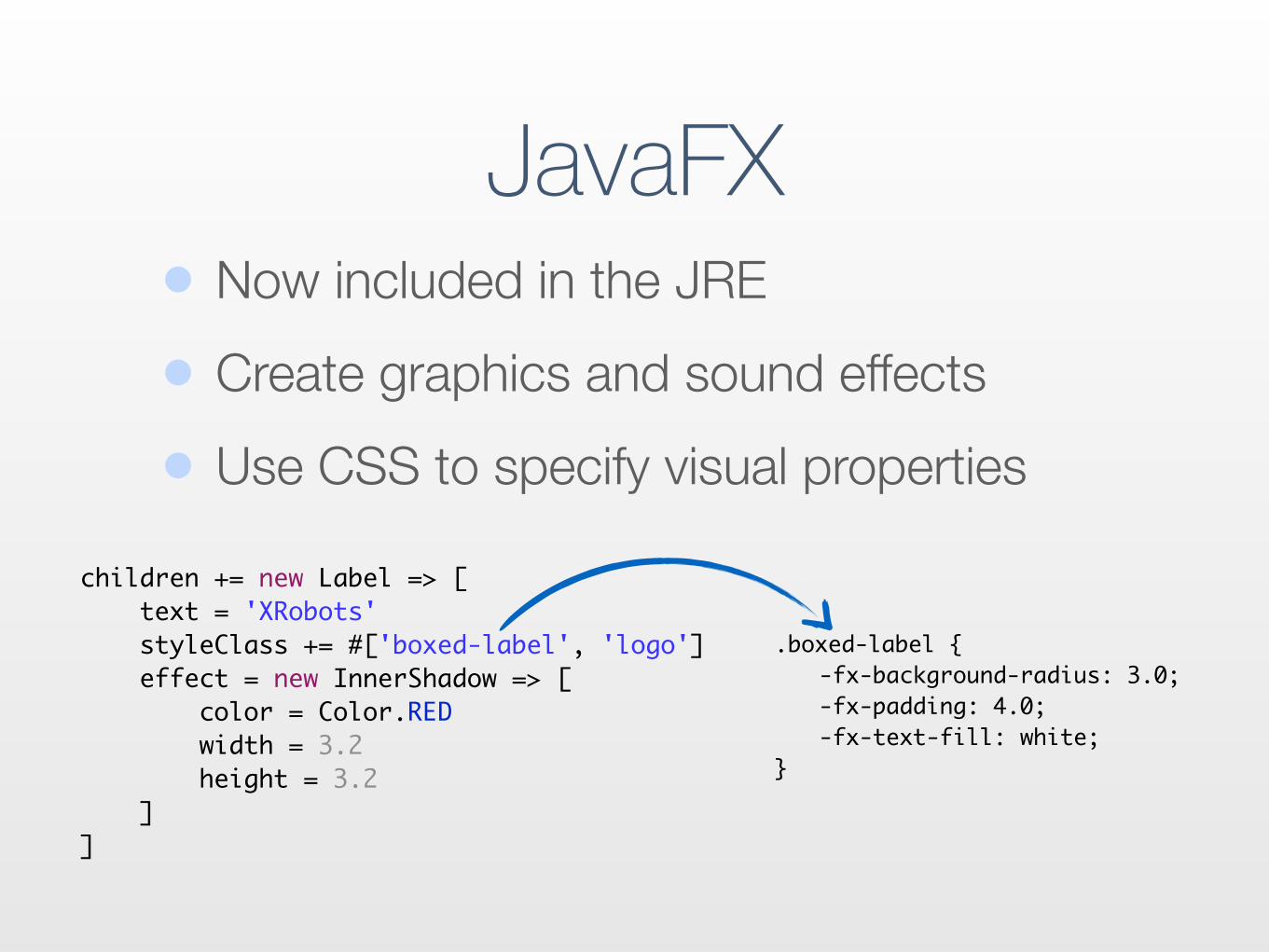
JavaFX• Now included in the JRE
• Create graphics and sound effects
• Use CSS to specify visual properties
children += new Label => [ text = 'XRobots' styleClass += #['boxed-label', 'logo'] effect = new InnerShadow => [ color = Color.RED width = 3.2 height = 3.2 ]]
.boxed-label { -fx-background-radius: 3.0; -fx-padding: 4.0; -fx-text-fill: white;}
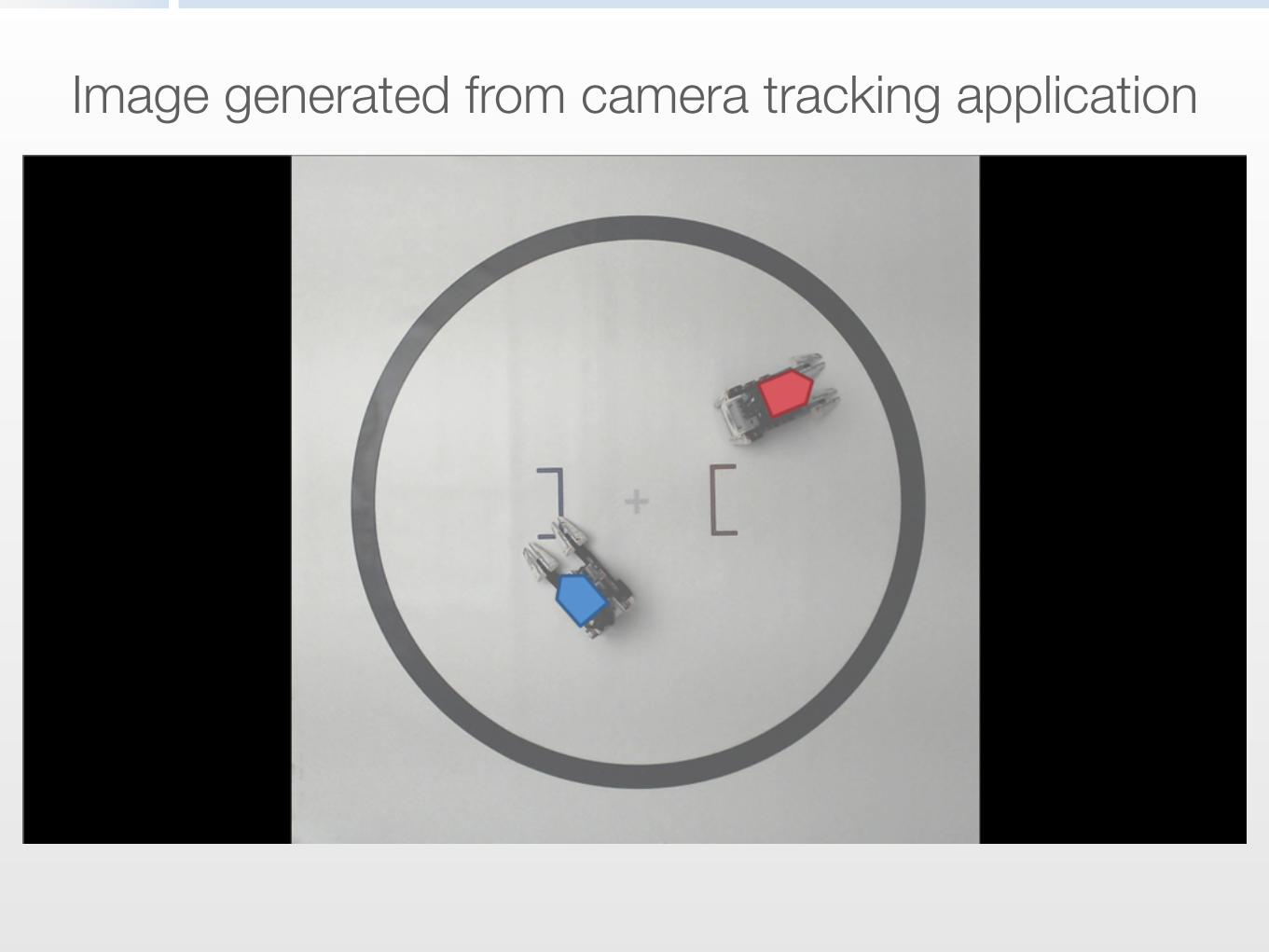
Image generated from camera tracking application
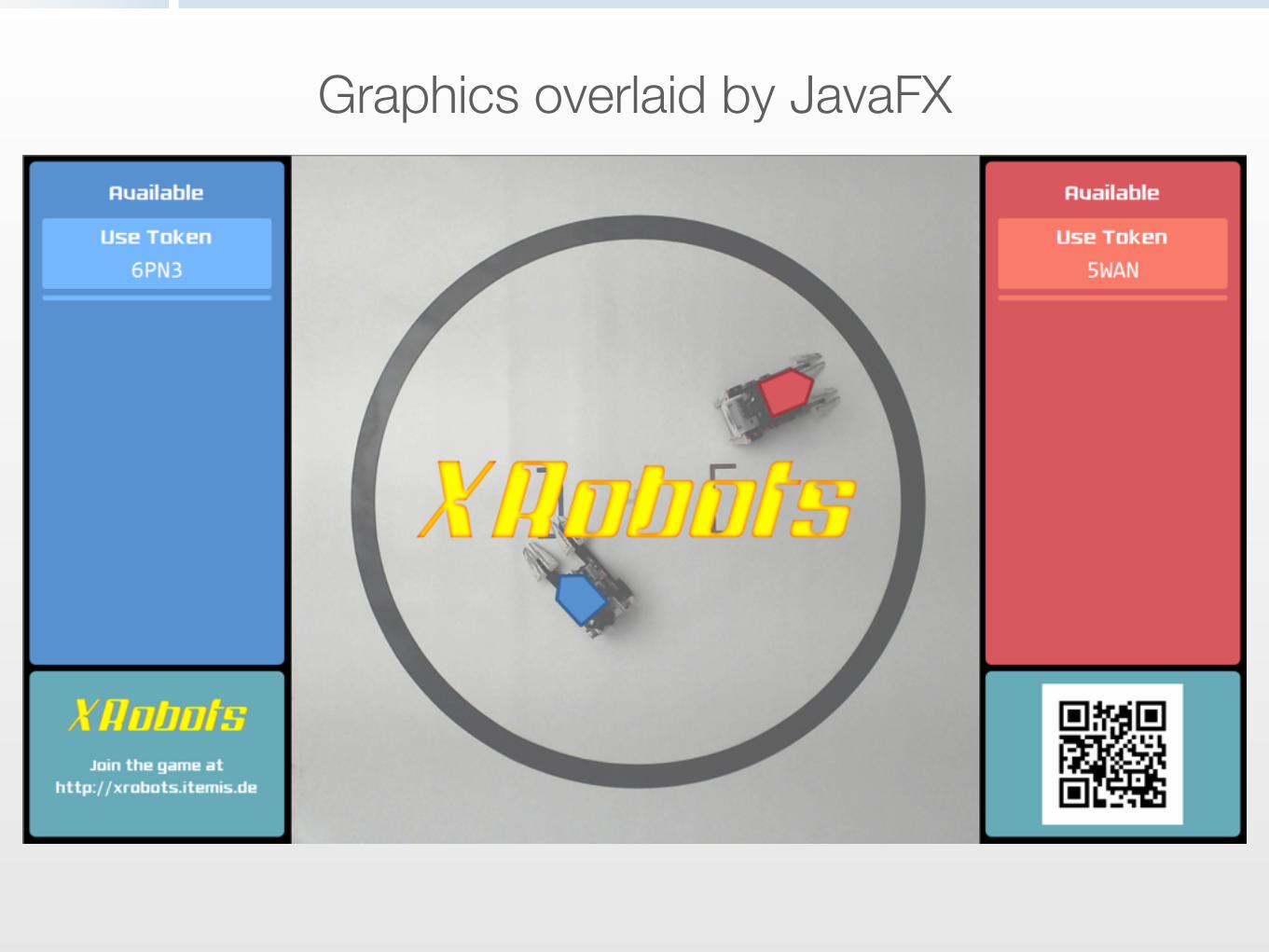
Graphics overlaid by JavaFX
Robots Can TalkText-to-speech library: FreeTTS (freetts.sourceforge.net)
say('Come get some!')
Come get some!


Security
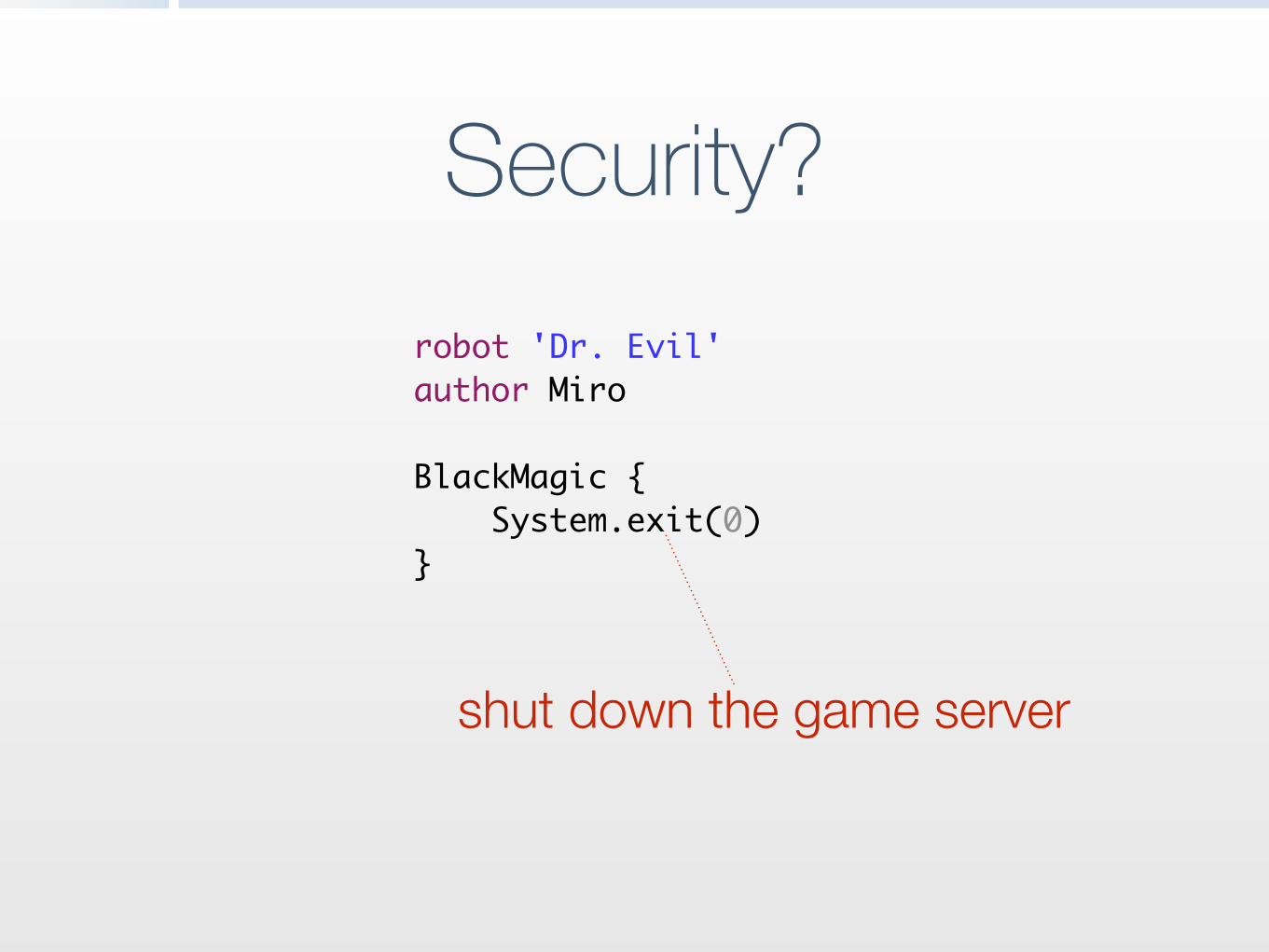
Security?robot 'Dr. Evil'author Miro!BlackMagic { System.exit(0)}
shut down the game server

Security Manager
• Block access to System.exit, file system, network, threads, etc.
• Throws SecurityException ⇒ game over
System.setSecurityManager(...)
thank you












![[JWPA-1]의존성 주입(Dependency injection)](https://img.pdfslide.us/doc/110x75/53fd903e8d7f72a81c8b4982/jwpa-1-dependency-injection.jpg)













![[JWAP-2] DI & Spring](https://img.pdfslide.us/doc/110x75/53fd90328d7f72a81c8b4981/jwap-2-di-spring.jpg)
