Embed Size (px)
Citation preview

Networks in Space: Granular Force Networks and Beyond
MASON A. PORTER (@MASONPORTER)
MATHEMATICAL INSTITUTE UNIVERSITY OF OXFORD
D. S. Bassett, E. T. Owens, K. E. Daniels, and MAP [2012], Physical Review E, Vol. 86, 041306 D. S. Bassett, E. T. Owens, MAP, M. L. Manning, & K. E. Daniels [2015], Soft Matter, Vol. 11, No. 14, 2731–2744 And beyond…

SEE (space, space, space, space, space…)
Soft Matterwww.softmatter.org
ISSN 1744-683X
PAPERDanielle S. Bassett et al.Extraction of force-chain network architecture in granular materials using community detection
Volume 11 Number 14 14 April 2015 Pages 2709–2896D. S. Bassett et al. [2015], Soft Matter, Vol. 11, No. 14, 2731–2744

SEE (space, space, space, space, space…)

Marc Barthelemy’s Review Article on Spatial Networks
• M. Barthelemy, “Spatial Networks”, Physics Reports, Vol. 499, 1–101 (2011)



Force Distribution
Small number of particles carry greater than average force
Force distribution in simulated granular packings with different number of grains Radjai et al. PRL 1996

Sound Propagation
Liu and Nagel J. Phys. Condens. Matter 1993
• Sound amplitude is very sensitive to small rearrangements in the granular packing. • Is this sensitivity due to sound propagation along the force network?

Granular Force Networks
• 2D, vertical, 1 layer aggregate of photoelastic disks • Internal stress pattern in compressed packing manifests as
network of force chains (panel B) • Force network is a weighted graph in which an edge
between 2 particles (nodes) exists if the two particles are in contact with each other; the forces give the weights
• Goal: Use a network-science perspective to try to understand the structure of these force chains

Experimental Setup• Excite acoustic waves from the bottom by sending pulses of 750
Hz waves • Bidisperse ensemble of disks
– Diameters: 9 mm, 11 mm – Density ≈ 1.06 g/cm3
– Viscoelastic, so Young’s modulus is frequency-dependent • E(0) ≈ 4 MPa, E(750 Hz) ≈ 50–100 MPa
• Particles in contact = distance between particle centers is less than 1.05 times sum of particle radii (overcounts)
• 17 experimental runs • Details: E. T. Owens & K. E. Daniels, EPL, Vol. 94, 54005 (2011)

Inter-Particle Force
• Experimentally measure force law to be • This implies that contact area scales as
5/4

Measuring Sound
750 Hz input signal detected via: (1) Change in particle brightness (ΔI) (2) Piezoelectric (V) [voltage increases linearly with change in stress; flat frequency response]

Network Communities• Communities = Cohesive
groups or modules – In statistical physics, one tries to
derive macroscale and mesoscale insights from microscale information
• Community structure is both modular and hierarchical
• Communities have larger density of internal ties relative to some null model for what ties are present at random – Modularity

Detecting Communities
• Survey article: MAP, J.-P. Onnela, & P. J. Mucha [2009], Notices of the American Mathematical Society, Vol. 56, No. 9, 1082–1097, 1164–1166
• Review article: S. Fortunato [2010], Physics Reports, Vol. 486, 75–174

Puck Rombach

Optimizing Modularity• Minimize:
– Potts Hamiltonian • σi = community assignment (spin state) of node i • Jij > 0 è “ferromagnetic” interaction between i & j
– è nodes i and j try to be in the same state • Jij < 0 è “antiferromagnetic” interaction between i & j
– è nodes i and j try to be in different states
• Modularity Optimization: – Aij = adjacency matrix – W = (1/2)ΣijAij = sum of all edge weights – Pij = prob(i connected to j) in null model
• Newman–Girvan: pij = kikj/(2W), where ki = ΣjAij = total edge weight of node i • “Resolution parameter”: use ϒ*pij

Sound Propagation in Granular Force Networks
• D. S. Bassett, E. T. Owens, K. E. Daniels, and MAP [2012], Physical Review E, Vol. 86, 041306
• 2D granular medium of photoelastic disks
• Two networks – Underlying topology (unweighted)
– Forces (weighted)
• Both types of networks are needed for characterizing sound propagation

Some Network Diagnostics• We used 21 diagnostics for the contact (unweighted) networks and
8 diagnostics for the force (weighted) networks • Contact networks: number of nodes, number of edges, global
efficiency, geodesic node betweenness, geodesic edge betweenness, random-walk node betweenness, eigenvector centrality, closeness centrality, subgraph centrality, communicability, clustering coefficient, local efficiency, modularity (optimized using 2 different algorithms), hierarchy, synchronizability, degree assortativity, robustness to targeted and random attacks, Rent exponent, mean connection distance
• Force networks: strength, diversity, path length, geodesic node betweenness, geodesic edge betweenness, clustering coefficient, transitivity, optimized modularity

• Global efficiency: – dij
w = length of weighted shortest path between nodes i and j
• Geodesic node betweenness: – Number of shortest paths through node i divided by number of
shortest paths
• Weighted clustering coefficient:
Some Diagnostics
2
make sure that we don’t induce any further issues and that we only fix things; need to make sure this
notation doesn’t conflict with anything; I don’t like the notation part of the ”solution” above; issue
with the choice of letter for the nodes as well We then calculated a local weighted clustering coe�cient
Cw(i) =N
cyc3(i)
ki(ki � 1)(3)
for all nodes i that are part of at least one 3-cycle. For any node i that is not part of any 3-cycle, we set Cw(i) = 0.The code (clustering_coef_wu.m) that we used for this computation comes from the Brain Connectivity Toolbox[2]. To subsequently calculate a global weighted clustering coe�cient, we computed Cw = 1
N
Pi Cw(i).
B. Weighted Transitivity
For weighted networks, we also calculated a di↵erent type of global clustering coe�cient. We again let ki be theweighted degree of node i. We also computed N
cyc3(i) as above, and we then calculated the global weighted transitivityusing the formula
Tw =
Pi Ncyc3(i)P
i ki(ki � 1)(4)
for all nodes i that are part of at least one 3-cycle. For any node i that is not part of any 3-cycle, we set Tw = 0. Thecode (transitivity_wu.m) that we used for this computation comes from the Brain Connectivity Toolbox [2].
II. TYPOGRAPHICAL ERRORS
Our formula (A2) for the geodesic node betweenness centrality of node i in an unweighted network should read
Bi =X
j,m2G
j,m(i)
j,m, (5)
where all three nodes (j, m, and i) must be di↵erent from each other, j,m is the number of geodesic paths betweennodes j and m, and j,m(i) is the number of geodesic paths between j and m that traverse node i. Our computationsof node betweenness for unweighted networks in Ref. [1] used equation (5), but the equation in the paper makes itlook like we were summing over the nodes. That is not the case, as there is a value of geodesic node betweennessfor each node i. The same change corrects equation (A21) for geodesic node betweenness centrality in a weightednetwork, and again all computations in Ref. [1] used the correct equation.
Our formula (A3) for the geodesic edge betweenness centrality of edge (j,m) that connects nodes j and m in anunweighted network should read
Be(j,m) =X
i,k
i,k(j,m)
j,m, (6)
where j,m is again the number of geodesic paths between nodes j andm, and i,k(j,m) is the number of geodesic pathsbetween i and k that traverse the edge that connects nodes j and m. That is, we used the same type of normalizationas in our computation of geodesic node betweenness centrality. The same comment about normalization applies toequation (A22) for geodesic edge betweenness centrality in a weighted network.
map: is there a specific BCT .m file to cite for edge betweenness?
In equation (A10) for the local e�ciency of node i in an unweighted network, we neglected to state explicitly thatNGi represents the number of nodes in the subgraph Gi.
Our formula (A24) for the transitivity of node i in a weighted network should read
T (i) =2
ki(ki � 1)
X
j,k
⇣WijWjkWik
⌘1/3
, (7)
where we have normalized weights by the maximum edge weight:
Wij =Wij
max (Wij).
2
make sure that we don’t induce any further issues and that we only fix things; need to make sure this
notation doesn’t conflict with anything; I don’t like the notation part of the ”solution” above; issue
with the choice of letter for the nodes as well We then calculated a local weighted clustering coe�cient
Cw(i) =N
cyc3(i)
ki(ki � 1)(3)
for all nodes i that are part of at least one 3-cycle. For any node i that is not part of any 3-cycle, we set Cw(i) = 0.The code (clustering_coef_wu.m) that we used for this computation comes from the Brain Connectivity Toolbox[2]. To subsequently calculate a global weighted clustering coe�cient, we computed Cw = 1
N
Pi Cw(i).
B. Weighted Transitivity
For weighted networks, we also calculated a di↵erent type of global clustering coe�cient. We again let ki be theweighted degree of node i. We also computed N
cyc3(i) as above, and we then calculated the global weighted transitivityusing the formula
Tw =
Pi Ncyc3(i)P
i ki(ki � 1)(4)
for all nodes i that are part of at least one 3-cycle. For any node i that is not part of any 3-cycle, we set Tw = 0. Thecode (transitivity_wu.m) that we used for this computation comes from the Brain Connectivity Toolbox [2].
II. TYPOGRAPHICAL ERRORS
Our formula (A2) for the geodesic node betweenness centrality of node i in an unweighted network should read
Bi =X
j,m2G
j,m(i)
j,m, (5)
where all three nodes (j, m, and i) must be di↵erent from each other, j,m is the number of geodesic paths betweennodes j and m, and j,m(i) is the number of geodesic paths between j and m that traverse node i. Our computationsof node betweenness for unweighted networks in Ref. [1] used equation (5), but the equation in the paper makes itlook like we were summing over the nodes. That is not the case, as there is a value of geodesic node betweennessfor each node i. The same change corrects equation (A21) for geodesic node betweenness centrality in a weightednetwork, and again all computations in Ref. [1] used the correct equation.
Our formula (A3) for the geodesic edge betweenness centrality of edge (j,m) that connects nodes j and m in anunweighted network should read
Be(j,m) =X
i,k
i,k(j,m)
j,m, (6)
where j,m is again the number of geodesic paths between nodes j andm, and i,k(j,m) is the number of geodesic pathsbetween i and k that traverse the edge that connects nodes j and m. That is, we used the same type of normalizationas in our computation of geodesic node betweenness centrality. The same comment about normalization applies toequation (A22) for geodesic edge betweenness centrality in a weighted network.
map: is there a specific BCT .m file to cite for edge betweenness?
In equation (A10) for the local e�ciency of node i in an unweighted network, we neglected to state explicitly thatNGi represents the number of nodes in the subgraph Gi.
Our formula (A24) for the transitivity of node i in a weighted network should read
T (i) =2
ki(ki � 1)
X
j,k
⇣WijWjkWik
⌘1/3
, (7)
where we have normalized weights by the maximum edge weight:
Wij =Wij
max (Wij).

Spatial Embeddesness Induces Correlations in Network Diagnostics

Random Geometric Graphs (RGGs)• Useful to compare properties of real networks to a
random graph ensemble as a “null model”, but we need one that is embedded in 2D Euclidean space
• N nodes (same as number of particles) distributed in 2D uniformly at random. There is an edge between any pair of nodes within some distance 2r. We choose r so that number of edges is the same as in the real system.

Contact Networks versus Random Geometric Graphs (very different)

A Better Model: RGG With A Sprinkling of Physics
• J. Setford, MPhys thesis, University of Oxford, 2014 – Available at http://people.maths.ox.ac.uk/porterm/research/setford-
final.pdf – Paper in preparation
• Start with an RGG, but now relax the centers of the particles – E.g. using a force law f = δβ for some amount of time to move
particles apart • δ = compression between two particles from initial placement • β depends on e.g. particle geometry; we used β = 5/4 based on experimental
measurements – Previous network diagnostics for modified RGG and experimental
packings now (mostly) match very well • Still some mysteries: e.g. degree assortativity is twice as large for the force-
modified RGG than for the experiments

Geographical Community Structure
• Different resolution-parameter values give communities at different scales.
• Averaged results over 100 realizations (spectral optimization of modularity)

Community Structure Constrains Sound Propagation

Ø D. S. Bassett, E. T. Owens, MAP, M. L. Manning, & K. E. Daniels [2015], Soft Matter, Vol. 11, No. 14, 2731–2744
Ø Use a null model that includes more information
Ø Fix topology (i.e. connectivity) but scramble geometry (i.e. edge weights) › Wij = weighted adjacency-
matrix element = force network
› Aij = binary adjacency-matrix element = contact network
Ø Communities obtained from optimization of modularity match well with empirical granular force networks in both laboratory and computational experiments
thereby construct a force-weighted contact network W from alist of all inter-particle forces. If particle i and j are in contact,then Wij ¼ fij/mean (f), where fij is the normal force betweenthem. If two particles are not in contact, then Wij ¼ 0. In addi-tion, we let Wii ¼ 0. We also construct an unweighted (i.e.,binary) matrix B whose elements are
Bij ¼!1; Wijs0;0; Wij ¼ 0:
The matrix B is oen called an “adjacency matrix”,24 and thematrix W is oen called a “weight matrix.”
To obtain force chains fromW, we want to determine sets ofparticles for which strong inter-particle forces occur amidstdensely connected sets of particles. We can obtain a solution tothis problem via “community detection”,34,35,44 in which we seeksets of densely connected nodes called “modules” or “commu-nities.” A popular way to identify communities in a network isby maximizing a quality function known as modularity withrespect to the assignment of particles to sets called “commu-nities.” Modularity Q is dened as
Q ¼X
i;j
"Wij " gPij
#d$ci; cj
%; (1)
where node i is assigned to community ci, node j is assigned tocommunity cj, the Kronecker delta d(ci, cj) ¼ 1 if and only if ci ¼cj, the quantity g is a resolution parameter, and Pij is theexpected weight of the edge that connects node i and nodej under a specied null model.
One can use the maximum value of modularity to quantifythe quality of a partition of a force network into sets of particlesthat are more densely interconnected by strong forces thanexpected under a given null model. The resolution parameterg provides a means of probing the organization of inter-particleforces across a range of spatial resolutions. To provide someintuition, we note that a perfectly hexagonal packing with non-uniform forces should still possess a single community forsmall values of g and should consist of a collection of single-particle (i.e., singleton) communities for large values of g. Atintermediate values of g, we expect maximizing modularity toyield a roughly homogeneous assignment of particles intocommunities of some size (i.e., number of particles) between 1and the total number of particles. (The exact size depends onthe value of g.) The strongly inhomogeneous communityassignments that we observe in the laboratory and numericalpackings (see Section IV) are a direct consequence of thedisorder in the packings.
An important choice in maximizing modularity optimizationis the null model Pij.45,46 The most common null model formodularity optimization is the Newman–Girvan (NG) nullmodel34,35,47,48
PNGij ¼ kikj
2m; (2)
where ki ¼X
j
Wij is the strength (i.e., weighted degree) of node
i and m ¼ 12
X
ij
Wij. The NG null model is most appropriate for
networks in which a connection between any pair of nodes ispossible. Importantly, many networks include (explicit orimplicit) spatial constraints that exert a strong inuence onwhich edges are present.12 For particulate systems, numerousedges are simply physically impossible, so it is important toimprove upon the NG null model for such applications. We usethe term geographical constraints to describe the explicit spatialconstraints in such systems. These constraints exert a signi-cant effect on network structure, so it is important to take theminto account when choosing a null model. For granular mate-rials (and other particulate systems), each particle can only be incontact (i.e., Wij s 0) with its immediate neighbors. We there-fore use a null model, which we call the geographical null model,to account for this constraint. The geographical null model is
Pij ¼ rBij, (3)
where r is themean edge weight in a network and B is the binaryadjacency matrix of the network (such a null model was usedpreviously for applications in neuroscience46). Recall that theadjacency matrix encapsulates the presence or absence ofcontact between each pair of particles. For a granular material,r ¼ !f :¼ hfiji is the mean inter-particle force. Because we havenormalized the edge weights in the force network (Wij¼ fij/mean(f)), we note that in our case r ¼ 1.
Maximizing Q yields a so-called “hard partition” of anetwork into communities in which the total edge weightinside of modules is as large as possible relative to the chosennull model. A hard partition assigns each node to exactly onecommunity. (An alternative is a “so partition”,49 whichallows each node in a network to be associated with multiplecommunities.) For the geographical null model in (3), maxi-mizing Q assigns the particles into communities that haveinter-module particle forces that are larger than the meanforce. Such communities represent the force chains in agranular system.
Because maximizing Q is NP-hard,50 the success of themaximization is subject to the limitations of the employedcomputational methods. In the present paper, we use a Lou-vain-like locally greedy algorithm.51 Additionally, given thenumerous near-degeneracies in the modularity landscape thattends to inict networks that are constructed from empiricaldata52 (i.e., many different partitions oen yield comparablylarge values of Q), we report community-detection results thatare ensemble averages over 20 optimizations.
B. Properties of force chains
We characterize communities using several diagnostics: size,network force, and a gap factor (a novel notion that we introducein the present paper). The size sc of a community c is simply thenumber of particles in that community. The systemic size s isgiven by the mean of sc over all communities. The modularity Qis composed of sums of magnitudes of bond forces and there-fore also has units of force. Therefore, we use the term networkforce to indicate the contribution of a community c to modu-larity. The network force of a community is given by the formula
2734 | Soft Matter, 2015, 11, 2731–2744 This journal is © The Royal Society of Chemistry 2015
Soft Matter Paper
Publ
ishe
d on
23
Febr
uary
201
5. D
ownl
oade
d by
Cal
iforn
ia In
stitu
te o
f Tec
hnol
ogy
on 2
1/04
/201
5 22
:40:
58.
View Article Online

Force-Chain Structure and Pressure
compact domains as pressure increases. At a large value of theresolution parameter (g ¼ 1.9), the detected communities tendto shrink from many-particle chains to 2-particle chains aspressure increases. This provides a way to quantify our earlierobservations that force-chain networks at higher pressures aremore homogeneous (observations at small g) and less chain-like (observations at large g) than they are at lower pressures.
At all pressures (and despite the aforementioned differ-ences), we nd a maximum in the systemic gap factor g as afunction of the resolution parameter g (see Fig. 5B). The shapeof the curve of the gap factor versus the resolution-parameterhas a more pronounced peak at higher pressures than at lowerpressures: larger slopes descend from and (especially) lead up tothe values of g near the maximum. At all pressures, small valuesof g select compact communities and large values of g selecttwo-particle communities. In between, we observe a value of g atwhich the most branch-like structures appear; we refer to thisvalue that approximately maximizes the gap factor as the
“optimal” value. This optimal value changes slightly as a func-tion of pressure; for example, gopt ¼ 0.9 at 5.9 " 10#3E and gopt
¼ 0.7 for 2.7 " 10#4E. High-pressure packings also exhibit amuch smaller systemic gap factor than low-pressure packings atboth small and large values of the resolution parameter. Thisobservation is consistent with both the increased compactnessof the communities and the increasingly homogeneous natureof the force-chain structure as one increases the pressure.
The resolution that maximizes the gap factor identiesstructures in a force network that are most reminiscent of theforce chains that are apparent by eye; in other words, itidenties branching communities. Therefore, to extract forcechains from force networks across different packings andpressures, we examine community structure for a range ofresolution parameters and identify the resolution-parametervalue that approximately maximizes the gap factor. We referto the communities detected at gopt as the “force chains” inour calculations, and we characterize their properties interms of their size, network force, and gap factor. For anillustrative example of a single packing whose communitiesare color-coded by either size, network force, or gap factor(see Fig. 3).
As we illustrate in Fig. 6, we observe that the size andnetwork force of the force chains have approximately expo-nential distributions for all seven pressures. This identies thatthe majority of communities are relatively small and weak, but afew communities are relatively large and strong. By contrast, thegap-factor distribution is skewed: most communities have alarge gap factor, and only a few communities have a small gapfactor. In high-pressure packings, communities tend to be lessbroadly distributed with respect to both size and network force;this is consistent with the homogenization of force chains aspressure increases.
Fig. 5 (A) Images of experimental 2D vertical packings of photoelasticdisks. These images reveal the manifestation of the internal stresspattern in a set of photoelastic particles as a network of force chains.(B) Community structure as a function of the resolution parameter gfor the following pressures: (top) 6.7 " 10#4E, (middle) 2.2 " 10#3E,and (bottom) 5.9 " 10#3E. Color indicates the logarithm (base 10) ofthe network force sc of community c. (C) Gap factor as a function ofboth the resolution parameter g and the pressure. The error barsindicate a standard deviation of themean over the laboratory packings.The arrow emphasizes increasing pressure.
Fig. 6 Cumulative probability distributions of (A) community size scand (B) network force sc for all communities. (C) Histogram of the gapfactor gc for all communities. In these calculations, we use gopt ¼ 0.9,which we choose to maximize the systemic gap factor g across allpressures (rather than for a single pressure). The arrows emphasizeincreasing pressure.
This journal is © The Royal Society of Chemistry 2015 Soft Matter, 2015, 11, 2731–2744 | 2737
Paper Soft Matter
Publ
ishe
d on
23
Febr
uary
201
5. D
ownl
oade
d by
Cal
iforn
ia In
stitu
te o
f Tec
hnol
ogy
on 2
1/04
/201
5 22
:40:
58.
View Article Online
sc ¼X
i;j˛C
!Wij " grBij
"; (4)
where C is the set of nodes in community c. The systemicnetwork force s is the mean of sc over all communities.Communities that correspond to force chains composed ofdensely packed particles with large forces between them havelarge values of network force, whereas communities thatcorrespond to force chains composed of sparsely packed parti-cles with small forces between them have small values ofnetwork force.
To identify the presence of gaps and the extent of branchingin the geometry of a force-chain network, we calculate thePearson correlation between “physical distance” (which wemeasure using the standard Euclidean metric) and “hopdistance” (which is oen called the “topological distance” andcounts distance measured only along network edges), and weexamine how the correlation depends on the force-chaintopology. Communities with compact or linear-chain charac-teristics (see the main diagonal in Fig. 2) occur when there is aperfect correlation between hop distance and physical distance.
The perfect correlation arises because particles that are onehop away from each other (i.e., they are adjacent to each other inthe binary contact network) are also 1 particle-distance away.Small linear chains occur close to the origin, where both hopdistance and physical distance are small, whereas long linearchains occur in the upper right quadrant of Fig. 2. Note that weuse the term “compact” in the spirit of the mathematical sense ofthe term, although our exact meaning is somewhat different:“compact” communities of particles are at the opposite extreme aslinear chains. Small compact blobs contain particles that are 1hop-distance away from one another and 1 particle-distance awayfrom one another, and they therefore occur near the origin ofFig. 2. Larger compact blobs contain particles that are several hop-distances away (and an equal amount of particle-distances away),and they therefore occur in the upper right quadrant of Fig. 2.
In contrast to compact blobs and linear chains, force chainswith gaps, branches, and rings have a larger hop distance than
physical distance (see the upper triangle in Fig. 2). Particles thatare close together in space do not necessarily have strong forces tobind them; the presence of more complicated shapes decreasesthe correlation between the physical and hop distance. (Note forparticulate systems that the lower triangle is unphysical, as itwould require forces between particles that are not in contact withone another to achieve a larger physical distance than hopdistance).
To identify communities that are composed of branchedstructures, we measure the amount of correlation between thehop distance and the physical distance in the set of all nodepairs in a given community. To compute the hop distance of acommunity, we dene the community contact network Bc. Itselements Bij
c are entries of the matrix B for which the corre-sponding nodes have both been assigned to the samecommunity c. We then calculate the path lengths betweenpossible pairs of nodes in a community c using the hop distanceon thematrix Bc. The resultingmatrix of pairwise distances is Lt.To compute physical distance, we calculate the Euclideandistances between all possible pairs of nodes in a community.The resulting matrix of pairwise distances is Lp.
In dening the community gap factor, we choose to weighteach community by its size. We thus weight large communitiesmore heavily than small communities in linear proportion to thenumber of particles that they contain. In this case, the gap factor gcof a community cmeasures the presence of gaps and the extent ofbranching in a community. We calculate it using with the formula
gc ¼ 1" rcscsmax
; (5)
where rc is the value of the Pearson correlation between theupper triangle of Lt and the upper triangle of Lp, and smax isthe size of the largest community. (Note that we exclude thediagonal elements of the matrices Lp and Lt). To providefurther illustration of this quantity, a set of communitiescolored by their respective gap-factors is shown in Fig. 3C.
We dene the (weighted) systemic gap factor as
g ¼ 1" 1
n
X
c
rcscsmax
; (6)
Fig. 2 Schematic illustration of the gap factor, which we measure viathe Pearson correlation between the hop distance Lt and physicaldistance Lp in granular force networks. Network communities withgaps, branches, and rings can have a larger hop distance than physicaldistance. They thus reside in the upper triangle.
Fig. 3 Sample community-detection results for a single granularexperiment at 4.1 # 10"4E. We color communities according to (A)community size sc, (B) network force sc, and (C) community gap factorgc. In these calculations, we use gopt ¼ 0.9, which we choose tomaximize the systemic gap factor g across all pressures (rather than fora single pressure). This example illustrates that the three networkdiagnostics can reveal very different spatial distributions in the data andthereby supports examining all three diagnostics.
This journal is © The Royal Society of Chemistry 2015 Soft Matter, 2015, 11, 2731–2744 | 2735
Paper Soft Matter
Publ
ishe
d on
23
Febr
uary
201
5. D
ownl
oade
d by
Cal
iforn
ia In
stitu
te o
f Tec
hnol
ogy
on 2
1/04
/201
5 22
:40:
58.
View Article Online

we observe a maximum of guniform at g¼ 0.9 (for g ˛ {0.1, 0.3,.,2.1}) in high-pressure packings (5.9 " 10#3E) and at g ¼ 1.5 forlow-pressure packings (2.7" 10#4E). In the numerical packings,we observe a maximum of guniform at g¼ 1.1 for all pressures. Incomparison to our observations in the main text from employ-ing the size-weighted systemic gap factor g, we nd that theoptimal value of g is larger when we instead employ guniform(compare Fig. 10 to Fig. 5 and 7). We also observe that the curvesof the systemic gap factor versus resolution parameter exhibitlarger variation for the uniformly-weighted gap factor than forthe size-weighted gap factor.
Optimal value of the resolution parameter
The large variation in the maximum of guniform over packingsand pressures makes it difficult to choose an optimal resolu-tion-parameter value. We choose to take gopt¼ 1.1 because (1) itcorresponds to the maximum of guniform in the numericalpackings and (2) it corresponds to the mean of the maximum ofguniform in the laboratory packings. To facilitate the comparisonof optimal values of g from the two weighting schemes, wedenote gopt for g as g and we denote gopt for guniform as guniform.Note that guniform ¼ 1.1 differs from (and is larger than) g ¼ 0.9.
Force-chain structure at the optimal value of the resolutionparameter
The force chains that we identify for the optimal value for theuniformly-weighted gap factor (at guniform ¼ 1.1) differ fromthose that we identied in the main text for the optimal value ofthe size-weighted gap factor (at g ¼ 0.9). We show ourcomparison in Fig. 11. For both laboratory and numericalpackings, the force chains that we identify at g ¼ 0.9 are largerand more branched than the ones that we identify at g ¼ 1.1(which are smaller and more linear). Indeed, the communitiesthat we identify at g ¼ 1.1 have more singletons than thecommunities that we identify at g ¼ 0.9. These results followfrom the difference in the two weighting schemes for calcu-lating a systemic gap factor. The size-weighted systemic gapfactor g weights larger communities more heavily than smallerones, and the larger communities tend to be the more branchedcommunities that we identify at smaller values of the resolutionparameter (e.g., at g ¼ 0.9). In contrast, the uniformly-weightedsystemic gap factor guniform gives equal weight to small and largecommunities, and it therefore uncovers the linear communitiesthat are evident at larger values of the resolution parameter(e.g., at g ¼ 1.1). We can therefore use the size-weighted gapfactor to identify larger, more branched force chains and theuniformly-weighted gap factor to identify smaller, more linearforce chains.
Appendix 2: MethodologicalconsiderationsRobustness of community structure to errors in theestimation of contact forces
In our frictional laboratory experiments, we estimate that errorsin the force measurements could be as large as $30% of the
contact force fij; the high variability arises from the nonlineartting process. (Recall that we take particles to be in contact ifthe force between them is measurable by our photoelasticcalculations. We then determine the particle contact forces bysolving the inverse photoelastic problem using images takenwith polarizers39). Somewhat surprisingly, we nd that theerrors in the force estimates are independent of both the localforce and the global pressure. To ensure that our results arequalitatively robust to these variations, we construct 20 simu-lated force networks for each experimental network (21 pack-ings, seven pressures) by adding Gaussian noise with width fij/3to each contact. For each of these simulated networks, wereevaluate the estimated community structure (from which weinfer the force chains).
To determine whether the estimates are robust to thisamount of noise, we compare the community structure of theactual force networks with those of the simulated forcenetworks using the z-score of the Rand coefficient.62 Forcomparing two partitions a and b, we calculate the Rand z-scorein terms of the network's total number M of pairs of nodes, thenumberMa of pairs that are in the same community in partition
Fig. 11 In both (A) (frictional) laboratory and (B) (frictionless) numericalpackings, we identify larger and more branched force chains at theoptimal resolution determined by (left; g ¼ 0.9) the size-weighted gapfactor g, and we identify smaller and less branched force chains at theoptimal resolution determined by (right; g ¼ 1.1) the uniformly-weighted gap factor guniform. These observations are consistent acrossall pressure values, but they are especially evident at high pressures inthe laboratory packings and are least evident at low pressures in thelaboratory packings. In the numerical packings, we observe littlevariation for different values of pressure. In both panels, we highlightthe network force for the force chains that we identify in examplepackings.
This journal is © The Royal Society of Chemistry 2015 Soft Matter, 2015, 11, 2731–2744 | 2741
Paper Soft Matter
Publ
ishe
d on
23
Febr
uary
201
5. D
ownl
oade
d by
Cal
iforn
ia In
stitu
te o
f Tec
hnol
ogy
on 2
1/04
/201
5 22
:40:
58.
View Article Online
Increasing Pressure
• For larger pressures, we obtain larger and more branched force chains in both the (frictional) laboratory packings described earlier and in frictionless numerical packings

Some Other Approaches for Studying Granular Force Networks (selected)
• Tools from computational homology (e.g. persistent homology): See papers by Konstantin Mischaikow, Lou Kondic, Bob Behringer, and collaborators
• Spatial patterns in breaking of edges in granular contact networks: See papers by Wolfgang Losert, Michelle Girvan, and collaborators
• Multiple network-based approaches by Antoinette Tordesillas and collaborators
• Other groups as well • (A survey article is now needed.)

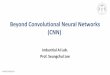
And Beyond…• We have also used spatial null models for studies of brain networks, disease-occurrence networks, and international migration networks
• Brain networks: similar type as the one I discussed today (see D. S. Bassett et al., Chaos, Vol. 23, No. 1, 013142, 2013)
• Diseases: comparison of null models based on gravity and radiation null models for human mobility – M. Sarzynskya et al., arXiv:
1407.6297 – It’s complicated.
• Migration: similar null models as with the disease case – V. Danchev & MAP, in preparation
22 of 45
(a) (b) (c)
FIG. 8. Visualization of the three different spatial partitions of Peru’s provinces on a map. (a) Broad climate partitioninto coast (yellow), mountains (brown), and jungle (green); (b) detailed climate partition, in which we start with thebroad partition and then further divide the coast and mountains into northern coast, central coast, southern coast, northernmountains, central mountains, and southern mountains; and (c) the administrative partition of Peru. We obtained provinceboundaries from [82] and plot the maps in MATLAB.
We use the term “spatial partitions” to describe partitions that have high z-Rand scores incomparison to the manual climate or administrative partitions. For multilayer networks, wealso compare the algorithmic partitions to partitions that contain a planted temporal change incommunity structure. For these comparisons, we group the multilayer nodes into ones that occurbefore or after a “critical” time tc (i.e., partitions into a “pre-tc” community and a “post-tc”community). We test the set t =
�1,1+D ,1+2D , . . . ,1+D ⇥
�b T
D c�1�
of times that weuse to create the multilayer network, and we report the time with the highest z-Rand score as thecritical time tc. We also test for pairs of critical times (yielding a partition into three communities)by examining all possible pairs of critical times tc1 and tc2 in the same manner. We use the term“temporal partitions” to describe algorithmic partitions of the disease-correlation networks thatyield high z-Rand scores in these comparisons.
4.3.1 Modularity Maximization Using the NG Null Model. We first study the communitystructures of the 700 overlapping static networks formed by taking t = {1,2, . . . ,700} and usingD = 80. (There are 779 time points in total.) The community structures that we obtain from max-imizing modularity have a strong spatial organization, as suggested by the high z-Rand scoreswhen compared to topographical partitions. As one can see in Fig. 9(a), in which we plot thez-Rand scores versus the centers of the time windows that correspond to the static networks, thespatial organization is especially evident starting in the year 2000. In our subsequent figures,time points that we indicate on the axes also correspond to the centers of the associated timewindows.
As one can see from a plot of number of epidemic cases over time (see Fig. 7), this transitionseems to occur near the time of the largest countrywide epidemic in the data, and the subse-quent period includes recurring yearly epidemics that were linked to climatic patterns in prior

Conclusions• Studying community structure allows one to examine
mesoscale structures in granular packings. – Provides diagnostics for structure of granular force chains
• General ideas for spatial networks – Comparison of properties to null models like random geometric
graphs (and suitable modifications thereof) • Also see work that Carl Dettmann is doing with modifications of RGGs
– Effect of physical constraints on the correlations of network diagnostics
– Development of null models that incorporate physical information • Funding: EPSRC, McDonnell Foundation, European
Commission (“PLEXMATH”)

Future Work: Granular Networks and Beyond
• Granular networks – Use network diagnostics in time-dependent situations to
determine “soft spots” (mini-earthquakes) • Note: I probably shouldn’t do this in Italy.
– Longer term: In addition to the idealized (2D) situations, get more seriously into geophysics.
• Example: Use community detection to find fault curves and compare with ones done manually by the experts
• Spatial networks more generally – Development of spatial null models – How do spatial effects influence network structure, induce
correlations between different structural measures, etc.?

Summer School on Computational Algebraic Topology
• https://people.maths.ox.ac.uk/tillmann/CAT-SCHOOL.html • Some funding available for students and postdocs