Embed Size (px)
Citation preview

!!!Miguel Duarte
Design of Communication and Control for Swarms of Aquatic Surface Drones !The CORATAM and HANCAD projects
Breaking the Surface 2014

Design of Communication and Control for Swarms of Aquatic Surface Drones
About me
!• BSc in Computer Science, University Institute of Lisbon (2007-2010) • MSc in Computer Science, University Institute of Lisbon (2010-2012) • PhD in AI & Robotics, University Institute of Lisbon (2012-2015*) !
• Member of the BIOMACHINES lab and Instituto de Telecomunicações !
• Research interests: • automatic behavior synthesis • artificial evolution • swarm robotics
Breaking the Surface 2014

Design of Communication and Control for Swarms of Aquatic Surface Drones
BIOMACHINES lab
• Established in 2011
• PI: Anders Lyhne Christensen
• 2 faculty members, 4 PhD students, 2 MSc students (as of Oct 2014)
• 40 publications in International Journals and Conferences
• Collective intelligence
• Automatic synthesis of control
• Evolutionary computation
• Self-assembly
• Fault tolerance
• http://biomachineslab.com
Breaking the Surface 2014

Design of Communication and Control for Swarms of Aquatic Surface Drones
Motivation
• Maritime missions are expensive to carry out (manned vehicles with large operational crews)
!!!
• Unmanned vehicles have the potential to lower such costs, but are still reasonably expensive (X0.000€), limiting their use to one or a low number of vehicles
Breaking the Surface 2014

Design of Communication and Control for Swarms of Aquatic Surface Drones
Motivation
• Alternative: swarms of simple, inexpensive robots !
• Potential missions: environmental monitoring, sea life localization, sea border patrolling, distributed sensing, etc…
!• Benefits: robustness, fault tolerance, scalability, availability
Breaking the Surface 2014

Design of Communication and Control for Swarms of Aquatic Surface Drones
Goals
• Develop a scalable, heterogeneous, and fault-tolerant ad-hoc network architecture for swarms of aquatic drones (HANCAD project)
!• Explore our novel control synthesis approach in a variety of real-world
maritime missions (CORATAM project) !
• Release all software and hardware as open-source !
• Proof-of-concept experiments with up to 25 robots until Summer 2015
Breaking the Surface 2014

Design of Communication and Control for Swarms of Aquatic Surface Drones
Hardware
Breaking the Surface 2014

Design of Communication and Control for Swarms of Aquatic Surface Drones
Hardware
Breaking the Surface 2014
Hull material Extruded polystyrene foam (XPS), milled in a CNC machine

Design of Communication and Control for Swarms of Aquatic Surface Drones
Control
• Problem: control for swarms of robots is difficult to manually derive !
• Potential solution: hybrid approach [1]: • Behavior primitives are artificial neural networks synthesized using
evolutionary algorithms (scalable, adaptable, robust, automatic) • Behavior arbitrators are simple finite state-machines that decide
when each primitive should be executed (simple, easy to change for different missions)
Breaking the Surface 2014
[1] M. Duarte, S. M. Oliveira and A. L. Christensen, "Evolution of Hybrid Robotic Controllers for Complex Tasks", Journal of Intelligent and Robotic Systems, 2014.

Design of Communication and Control for Swarms of Aquatic Surface Drones
Preliminary results
Breaking the Surface 2014
[1] M. Duarte, S. M. Oliveira and A. L. Christensen, "Hybrid Control for Large Swarms of Aquatic Drones", Proceedings of ALIFE, 2014.
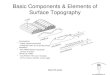
Top Level
Behavior Arbitrator
Behavior Primitive
Patrol
Behavior Primitive Behavior Primitive
Go To Waypoint Pursue Intruder

Design of Communication and Control for Swarms of Aquatic Surface Drones
Questions?
Breaking the Surface 2014
http://biomachineslab.com