Embed Size (px)
Citation preview
PRESENTER : DR M PERTINRIMS,IMPHAL(INDIA)
i-Limb Hand
27/9/2014; 2 pm
1
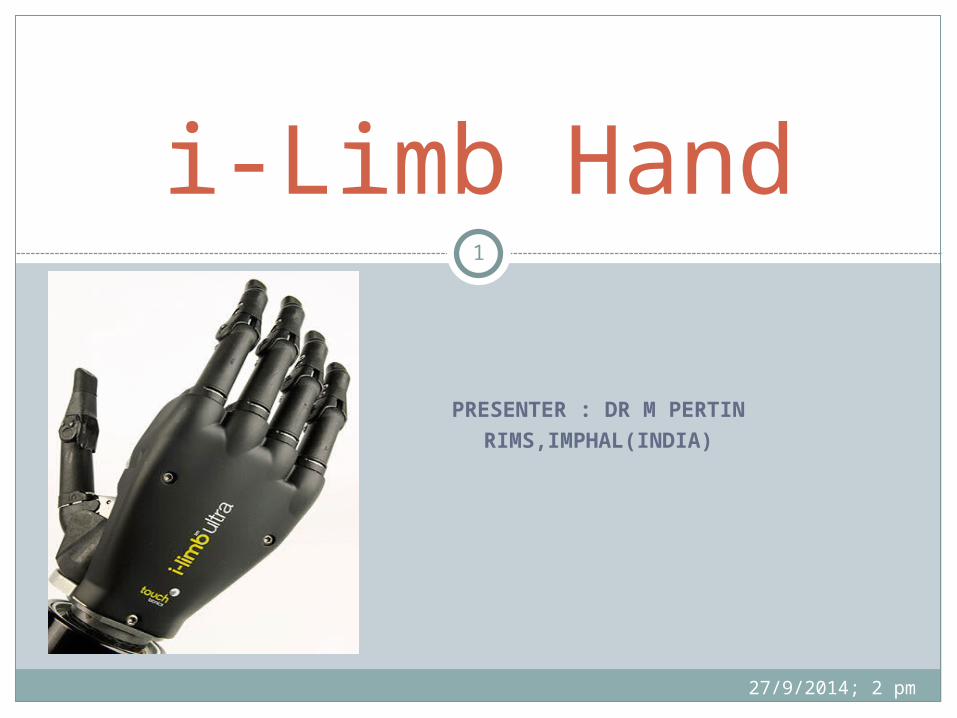
History of Prosthetics
Oldest known splint: 5th Egyptian Dynasty (2750-2625 B.C.)
500 BC : Earliest known written reference on artificial limb by Herodotus, Greek historian
300 B.C : Artificial limb made of copper and wood leg unearthed at Capri, Italy in 1858
27/9/2014; 2 pm
2
1529, Ambroise Pare, French surgeon introduced amputation – 1st scientific prosthesis
1863, Dubois L Parmelee , New York City : socket
1898 :Dr Vanghetti invented an artificial limb that could move with muscle contraction
1946 : Suction sock for the AK prosthesis at University of California (UC) at Berkeley
27/9/2014; 2 pm
3
History of myoelectric prosthesis
Myoelectric control (1945) : 1st implemented by Reinhold Reiter, physics student at Munich University; prototype demonstrated
1948 : Production stopped due to lack of fundLate 1950s & early 1960s : USSR, United Kingdom,
USA, Europe and Canada, after invention of transistors1964 :1st commercial myo-electric arm; Central
Prosthetic Research Institute, USSR; distributed by the Hangar Limb Factory, UK
1970s : rapid development; advances in battery and magnet technology; reduction in motor size and weight
27/9/2014; 2 pm
4
Non prehensileNon prehensile PrehensilePrehensile
• Touching, feeling• Pressing down• Tapping• Stirring• Vibrating cords of
instruments• Lifting/pushing with
hand
Precision grips• Palmar pinch• Tip pinch• Lateral or key pinch• Three jaw chuck Power grips• Cylindrical grip• Spherical grip• Hook
Hand functions
27/9/2014; 2 pm
5
Psychosocial roles : Gestures, caressing, communication, and sensation.
Psychosocial roles : Gestures, caressing, communication, and sensation.
Ideal prosthesis
Function - simple, meet user’s need and
dependable
Comfort - fits well, easy to don and doff, light
weightCosmesis - natural look both at rest and
` functional activity Fabrication - easy and widely available
Economics - affordable and worth costProsthetic device that provides the best prehension and functional
movement is an important goal Prosthetic device that provides the best prehension and functional
movement is an important goal
Prosthetic options
Passive prosthesis Body-powered prosthesis Electrically powered prosthesis Hybrid prosthesis Activity-specific prosthesis
27/9/2014; 2 pm
7
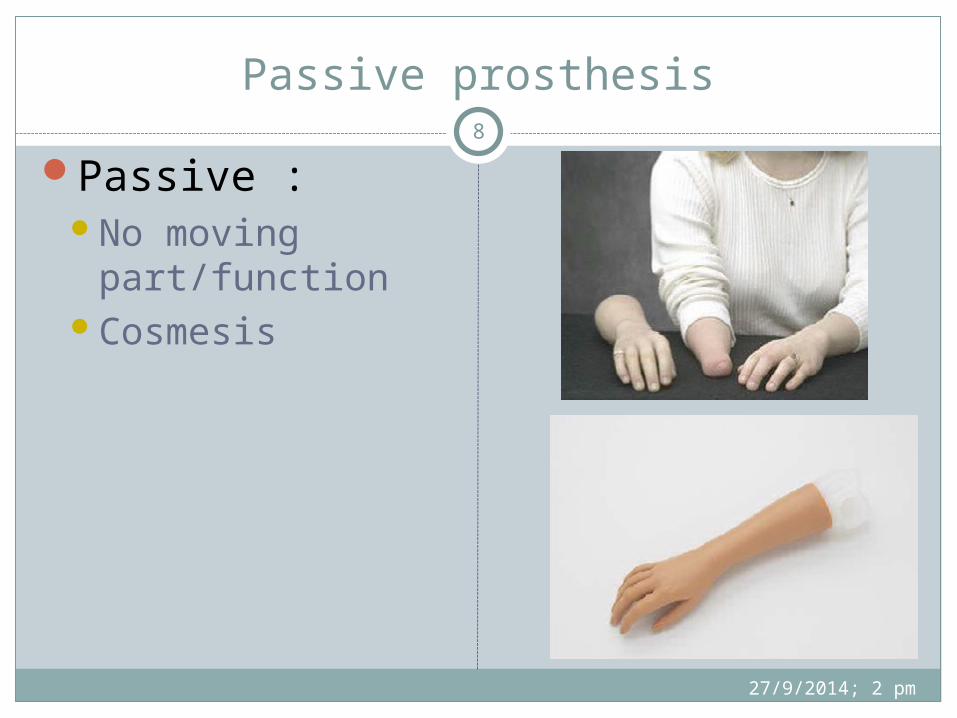
Passive prosthesis
Passive : No moving
part/functionCosmesis
27/9/2014; 2 pm
8
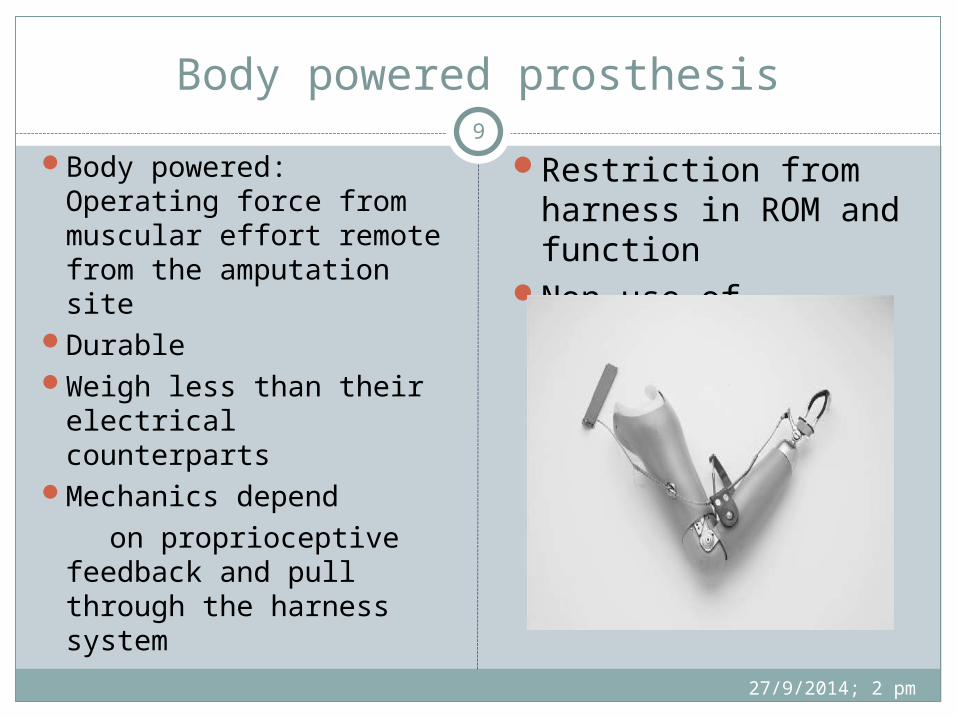
Body powered prosthesis
Restriction from harness in ROM and function
Non use of prosthesis
Body powered: Operating force from muscular effort remote from the amputation site
DurableWeigh less than their
electrical counterpartsMechanics depend on proprioceptive
feedback and pull through the harness system
27/9/2014; 2 pm
9
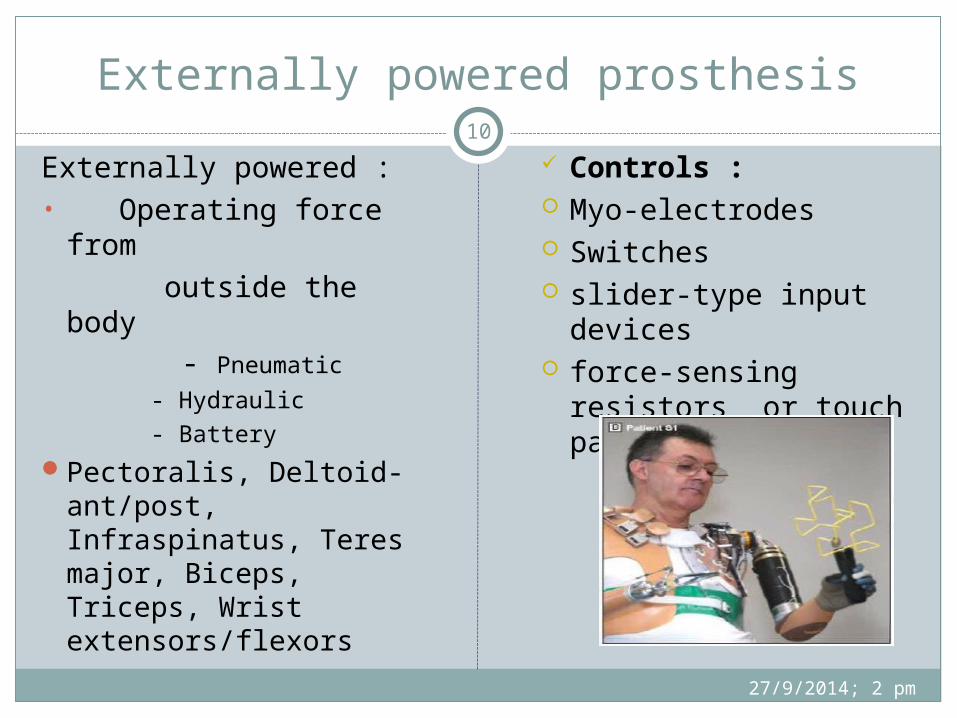
Externally powered prosthesis
Externally powered :• Operating force
from outside the body - Pneumatic
- Hydraulic - Battery
Pectoralis, Deltoid-ant/post, Infraspinatus, Teres major, Biceps, Triceps, Wrist extensors/flexors
Controls : Myo-electrodes Switches slider-type input
devices force-sensing resistors
or touch pads
27/9/2014; 2 pm
10
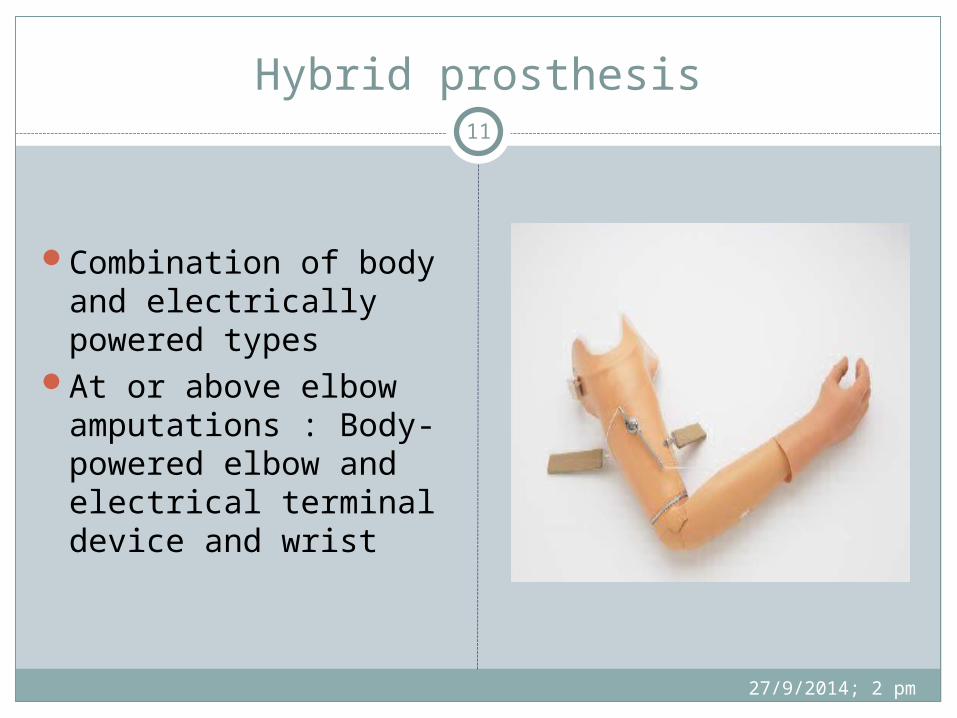
Hybrid prosthesis
Combination of body and electrically powered types
At or above elbow amputations : Body-powered elbow and electrical terminal device and wrist
27/9/2014; 2 pm
11

Activity specific terminal devices
27/9/2014; 2 pm
12
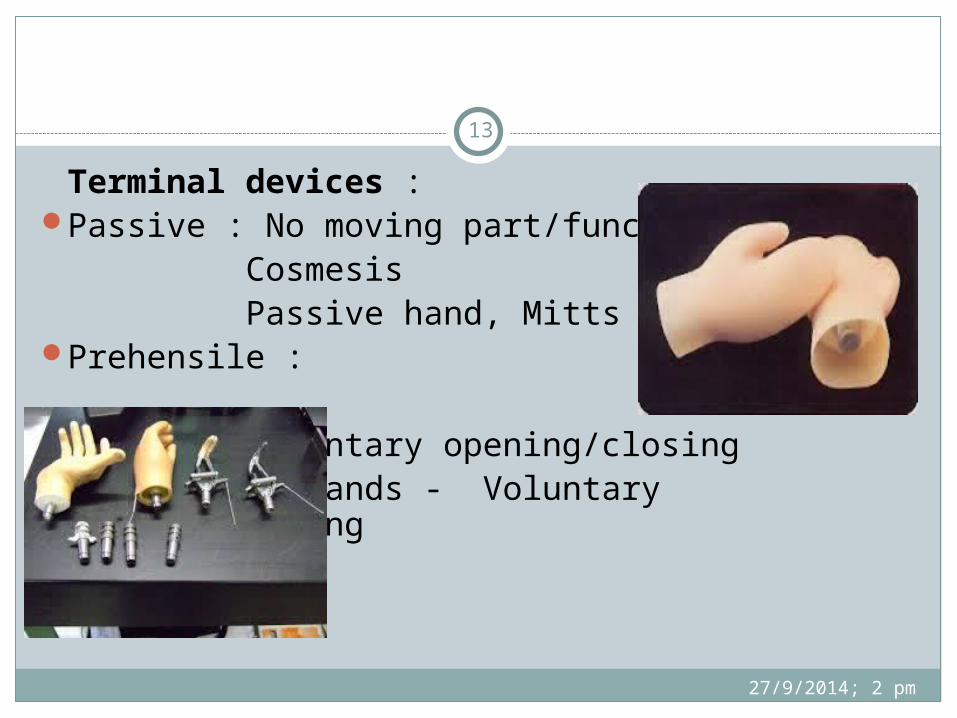
Terminal devices :Passive : No moving part/function
Cosmesis Passive hand, Mitts
Prehensile :
Hooks – Voluntary opening/closing Hands - Voluntary
opening/closing
27/9/2014; 2 pm
13
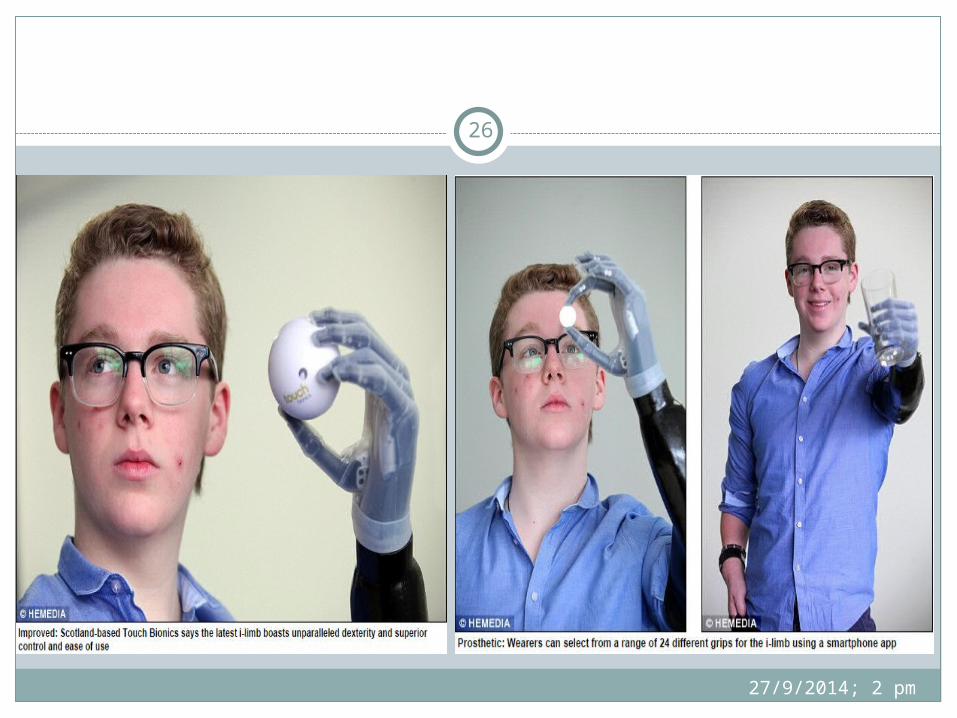
i-Limb Hand
Bionic HandFirst commercial active prosthetic3 variants : I-Limb Pulse, Ultra & Ultra
revolutionDeveloped by David Gow of the Scottish
National Health ServiceBuilt by Touch Bionics™Major advance on previous hooked limbs.Became commercially available in 2007
27/9/2014; 2 pm
14
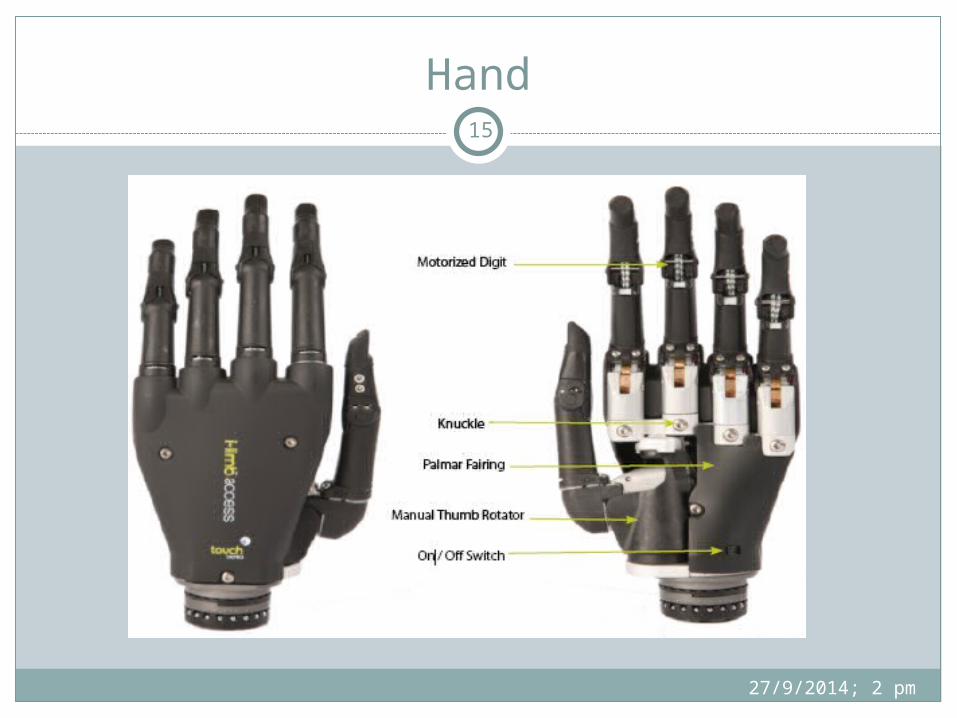
Hand
27/9/2014; 2 pm
15
Wrist
Multiple positions of flexion and extension in set increments
Quick detachment for changing between terminal devices
Flexible mode: Natural movement with progressive resistance with a spring-loaded mechanism that returns the wrist to a neutral position
Rigid mode: Locks the flexion or extension in increments for holding and carrying objects
360-degree rotation, with stops at multiple positions
27/9/2014; 2 pm
16
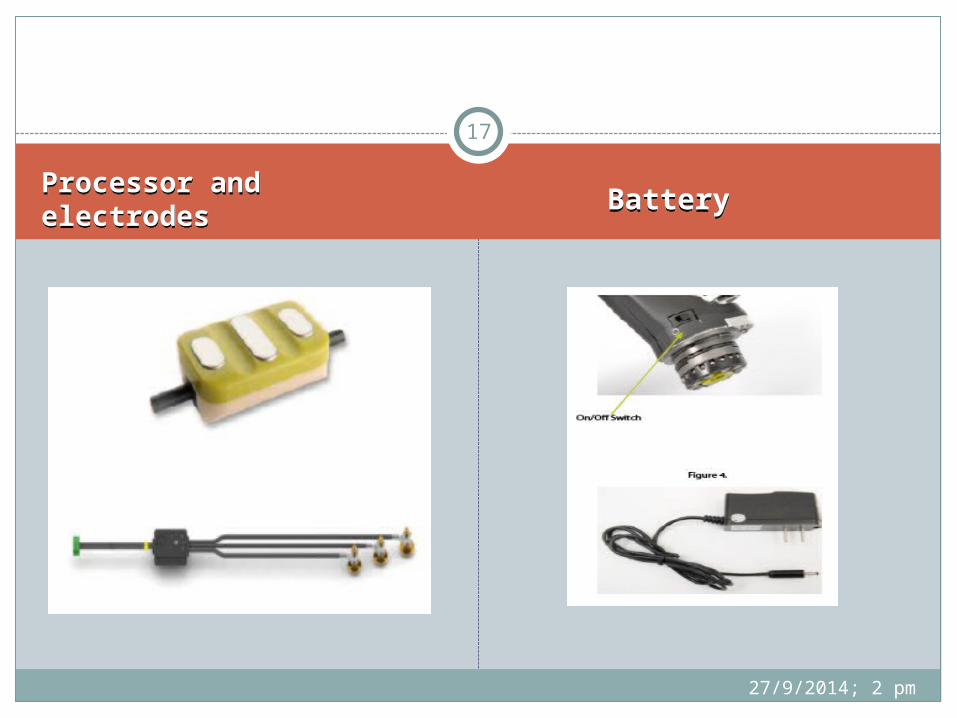
Processor and electrodesProcessor and electrodes Battery Battery
27/9/2014; 2 pm
17
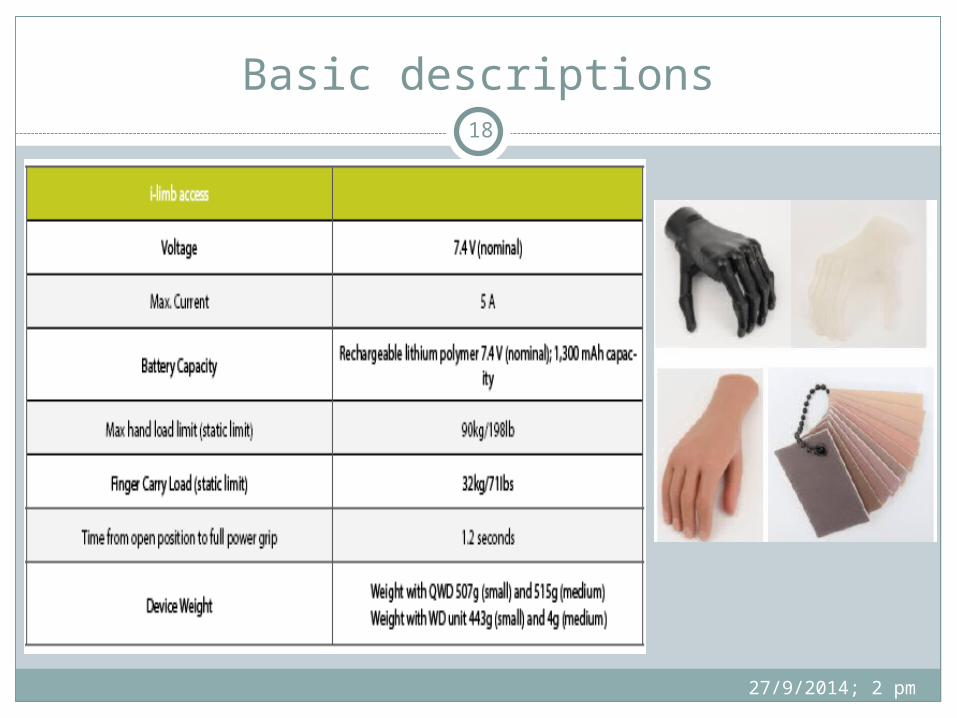
Basic descriptions
27/9/2014; 2 pm
18
How It Works
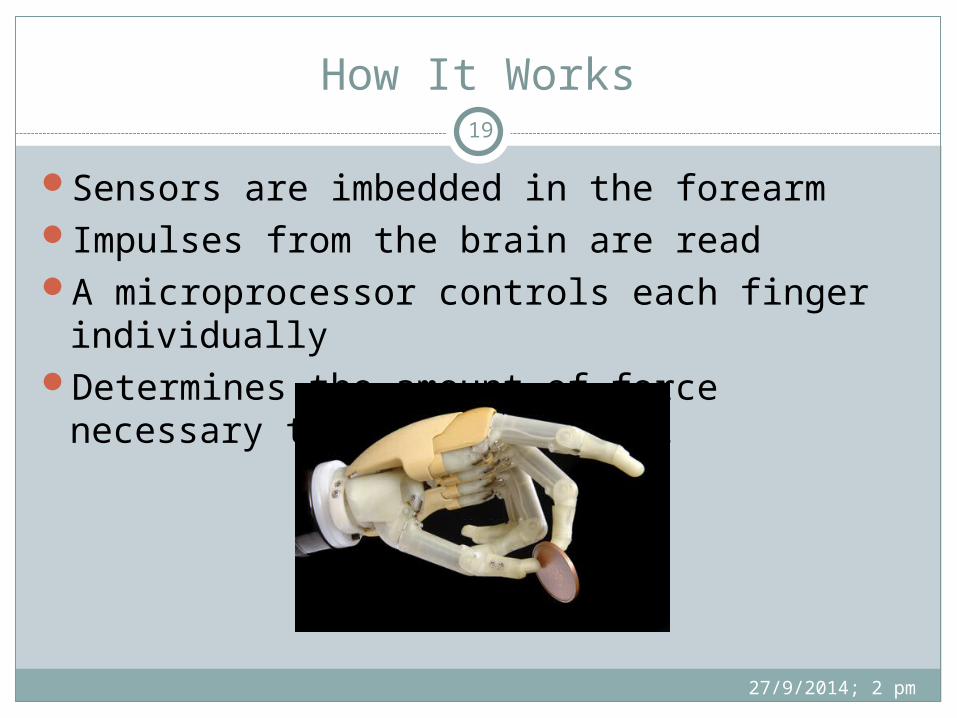
Sensors are imbedded in the forearmImpulses from the brain are readA microprocessor controls each finger
individuallyDetermines the amount of force necessary to
grasp an object
27/9/2014; 2 pm
19
How it works
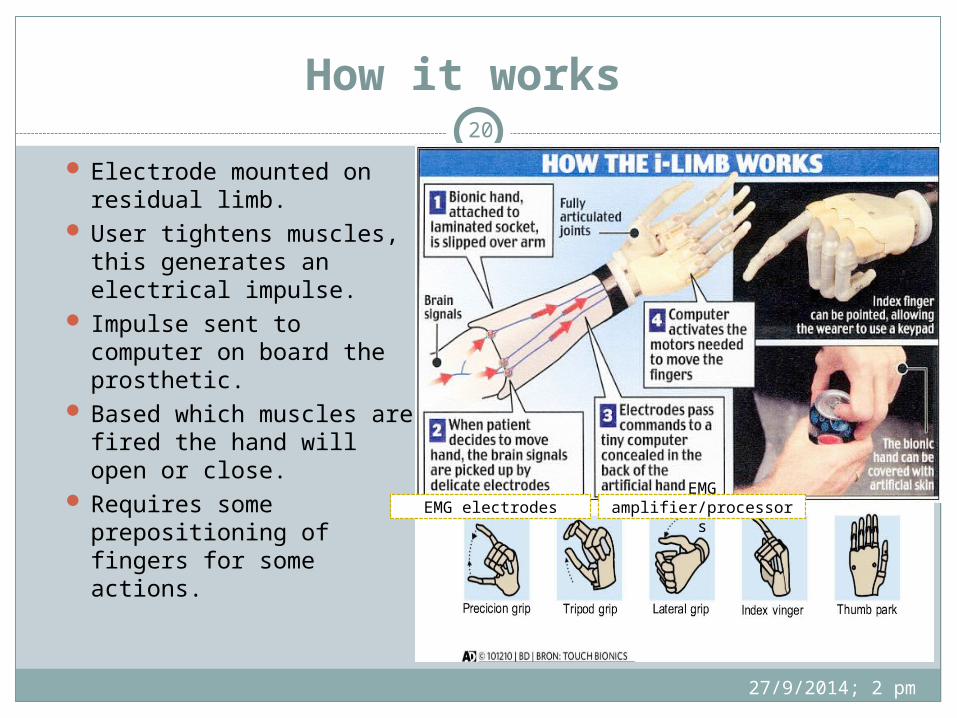
Electrode mounted on residual limb.
User tightens muscles, this generates an electrical impulse.
Impulse sent to computer on board the prosthetic.
Based which muscles are fired the hand will open or close.
Requires some prepositioning of fingers for some actions.
27/9/2014; 2 pm
20
EMG electrodesEMG
amplifier/processors
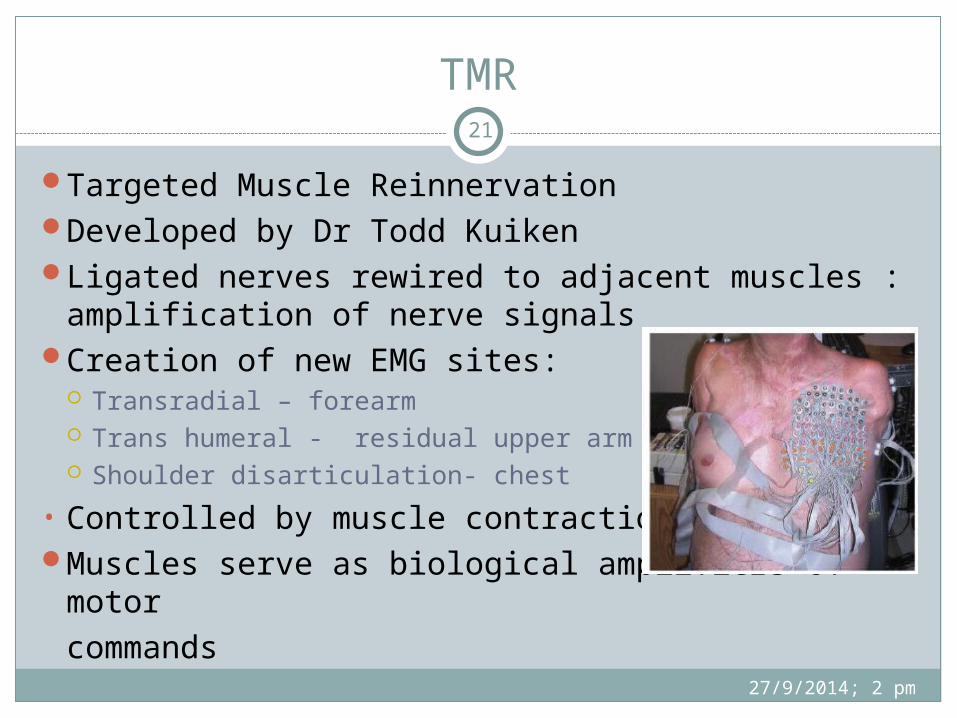
TMR
Targeted Muscle ReinnervationDeveloped by Dr Todd KuikenLigated nerves rewired to adjacent muscles :
amplification of nerve signalsCreation of new EMG sites:
Transradial – forearm Trans humeral - residual upper arm Shoulder disarticulation- chest
• Controlled by muscle contractionsMuscles serve as biological amplifiers of motor
commands 27/9/2014; 2 pm
21
Features
3 degrees of freedom : Elbow flexion/extension Wrist supination/pronation Terminal device opening/closing
• 5 articulating fingers moving independently at joints similar to natural joints
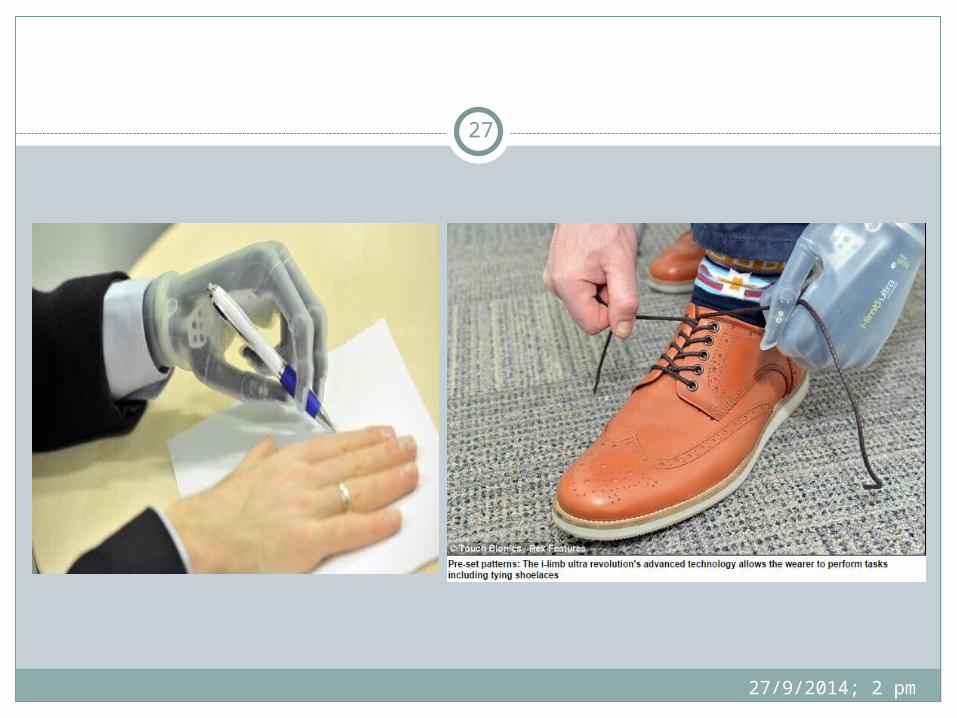
• Near normal dexterity :• Can hold a single sheet of paper or string• Withstand strain upto 99 kg • Instantaneous action• High degree of proportionality to the muscle activity
27/9/2014; 2 pm
22
Features cont.....
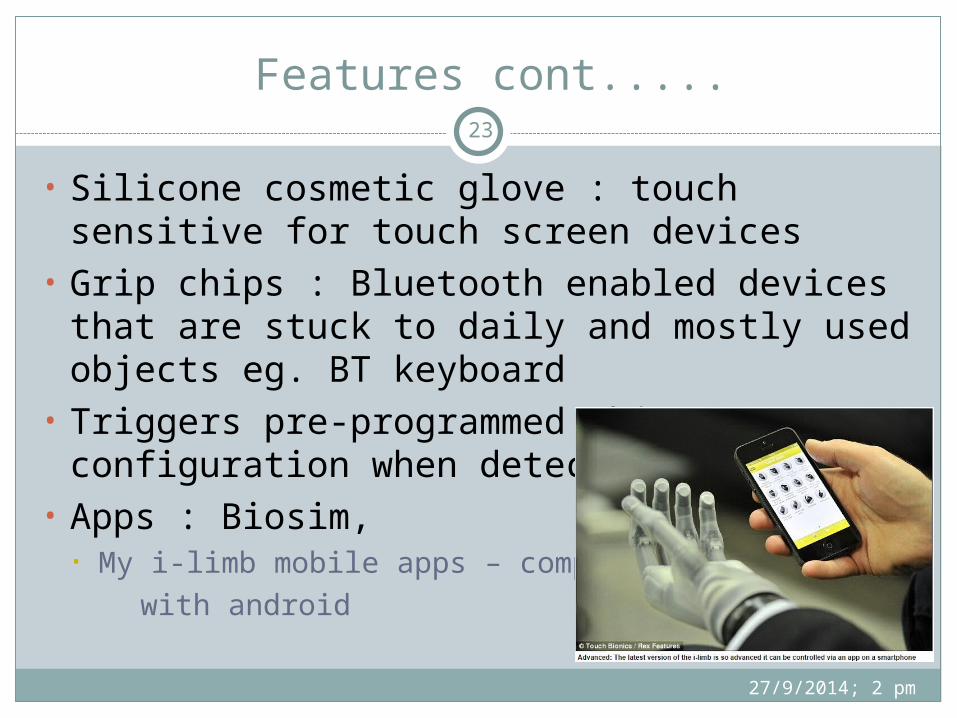
• Silicone cosmetic glove : touch sensitive for touch screen devices
• Grip chips : Bluetooth enabled devices that are stuck to daily and mostly used objects eg. BT keyboard
• Triggers pre-programmed chip configuration when detected by i-limb
• Apps : Biosim,• My i-limb mobile apps – compatible with android
27/9/2014; 2 pm
23
Features cont.....
Vari grip mode : variable digit by digit grip strength
Auto grasp mode : prevents objects from falling
Inactivity : automatically moves to standby resting position
Feeling as part of body
27/9/2014; 2 pm
24

23 Apr 2013
27/9/2014; 2 pm
25
27/9/2014; 2 pm
26
27/9/2014; 2 pm
27
Right candidate ?
• Amputation at the wrist or forearm
• Standard body-powered prosthetic devices are insufficient to meet the functional needs
• Musculature has minimum microvolt threshold to allow operation of a myoelectric prosthetic device
• No neuromuscular disease
• Good cognition
27/9/2014; 2 pm
28
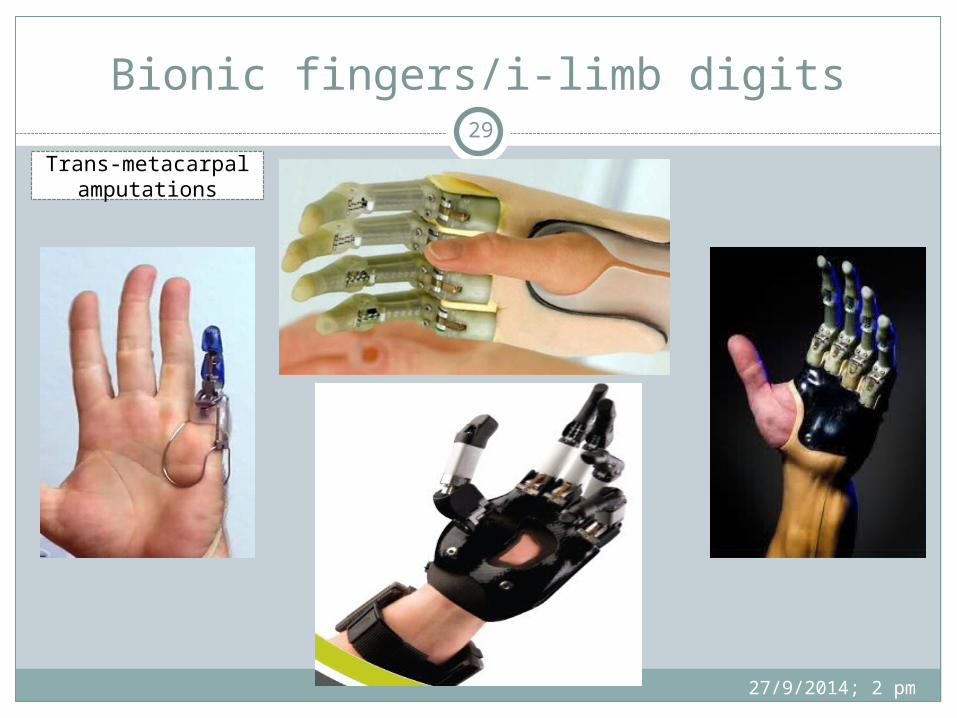
Bionic fingers/i-limb digits
27/9/2014; 2 pm
29
Trans-metacarpal amputations
27/9/2014; 2 pm
30
Positives
Simple to implementNon-invasiveMore range of motionIndividually moving fingers allow for better gripLarger functional area- more ADL independenceMore natural appearanceDust resistantCan reduce phantom painPsychological advantage
27/9/2014; 2 pm
31
Setbacks
Heavy- muscle fatigue and frictionCostAvailabilityMoisture- problem with electronic circuitry if
improper fabricationRequire prepositioning for some actionsFinger control coupled with open/close
function,so not completely independent
No sensory control to control grip strengthPre-programmed grip patterns to learn27/9/2014; 2 pm
32
Future promising areas
Challenge : Limited input to control vast outputsTargeted Sensory Re-innervation (TSR)- sensory
feedbackArtificial muscles(Electroactive polymers)Osteo-integration Mechano-myographic (MMG) feedback: control
of a prosthetic device with cortical and peripheral nerves
Other Bionic Limbs -Shoulders, Wrists, Elbows
27/9/2014; 2 pm
33
Boston digital armBebionic 3 (Terminator hand) : developed by
RSL Steeper Multi-articulating myo-electric hand
Michelangelo hand : Developed by Advanced Arm Dynamics & Otto Bock Features a thumb that electronically moves to
different positions for multiple grip functions
27/9/2014; 2 pm
34
27/9/2014; 2 pm
35
Before your comments and questions......
27/9/2014; 2 pm
36
Cost of an i- limb hand ????
27/9/2014; 2 pm
37
Ans : $ 18,000 - $ 48,000 /-
= Rs 11,02,140 – 29,39,040 /- ( 1 $ = Rs 61.23) ≈ ( 27/09/2014)
27/9/2014; 2 pm
38
Thank you !!
27/9/2014; 2 pm
39
27/9/2014; 2 pm
40
27/9/2014; 2 pm
41















![HAND · 2010-04-17 · 4 | Page [The Hand] EMBRYOLOGY of the Upper Limb at Weeks 4 to 6 ⊕The critical APICAL ECTODERMAL RIDGE the limb mesenchyme for growth & development of the](https://img.pdfslide.us/doc/110x75/5e80adf46b60c9377a2867b8/2010-04-17-4-page-the-hand-embryology-of-the-upper-limb-at-weeks-4-to-6-athe.jpg)