Embed Size (px)
DESCRIPTION
Final Project Report for Automated Cardiopulmonary Resuscitation Device Submitted by Meryl Michael Rodrigues Rishabh Manoj Shetty Ashish Dilp Vaswani under the guidance of Prof. (Dr.) Mita Bhowmick Mr. Praveen Valsalan Mt. Tanvir Daphedar
Citation preview

AUTOMATED CARDIOPULMONARY RESUSCITATION DEVICE
PROJECT
Submitted in partial fulfillment of the requirements
For the degree of
BACHELOR OF ENGINEERING
By
MERYL MICHAEL RODRIGUES
RISHABH MANOJ SHETTY
ASHISH DILIP VASWANI
Under the guidance of
Prof (Dr.) Mita Bhowmick
Professor & Head of Biomedical Dept, Thadomal Shahni Engg College, Bandra (West)
DEPARTMENT OF BIOMEDICAL ENGINEERINGTHADOMAL SHAHANI ENGINEERING COLLEGE
UNIVERSITY OF MUMBAI 2010-2011
1

2

3

TABLE OF CONTENTS
Page
1. INTRODUCTION .........................................................................................1
2. REVIEW OF LITERATURE
2.1 Manual CPR vs Automated CPR ............................................................2
2.2 CPR Guidelines .......................................................................................2
2.3 Life-Stat vs AutoPulse vs Lucas ……………………………………… 5
3. DESIGN
3.1 Hardware .................................................................................................9
3.1.1 Belt Design ..................................................................................... 9
3.2.2 Spring Design ................................................................................10
3.2.3 Cam Design …………………………………………………….. 10
3.2.4 Magnetic Field Design …………………………………………..11
3.2.5 Twin Motor Design …………………………………………….. 12
3.2.6 Final Design ………………………………………………….… 13
4. IMPLEMENTATION AND TESTING
4.1 Stage I ………………………………………………………………...14
4.2 Stage II ……………………………………………………………….14
4.2.1 Materials to be Used ……………………………………………14
4.2.2 Stages in Fabrication of the Device ……………………………15
4.2.3 Mounting on the Base Plate …………………………………….15
4.2.4 Patient Plate and Adjustable Stand ……………………………...17
4.2.5 Final Mounting ………………………………………………..…17
4.2.6 Timing the Compressions …………………………………..……18
4.2.7 L293D Motor Driver………………………………………….….20
4

5. CONCLUSION …………………………………………………………22
6. FURTHER SCOPE ………………………………………………………23
7. REFERENCES ………………………………………………………….24
SUMMARY
APPENDICES
Appendix I: IC 555 Multivibrator
Appendix II: L293D Motor Driver
ACKNOWLEDGMENTS
5

LIST OF FIGURES
Figure Title Page
Number Number
Fig 3.1: Illustration of the entire system diagram 8Fig 3.2: Illustration of the belt design 9
Fig 3.3: Illustration of the Spring Design 10
Fig 3.4: Illustration of CAM Design 11
Fig 3.5: Illustration of Magnetic Field Design 12
Fig 3.6: Illustration of Twin Motor Design 13
Fig 3.7: Illustration of Final Design 14
Fig 4.1: Illustrations of Cardboard Design 15 and wooden components
Fig 4.2: Illustration of motor after mounting 18
on the base plate
Fig 4.3: Illustration of Final Fabricated Product 19
Fig 4.4: Illustration of Astable mode of operation 20
of IC 555
Fig 4.5: Illustration of pin description of L 293D 22
Fig 4.6: Illustration of Final Hardware Interfacing 22
6

SUMMARY
The project aims to design and implement an automated cardiopulmonary
resuscitation (CPR) device, which could become a critical life-saving
equipment of the future. Absence of such a device in the healthcare industry
today is a major cause for critical loss of life in cases of sudden cardiac arrest
(SCA). Through this project, we wish to initiate a breakthrough revolution in
providing cardiac assistance in critical cases, leading to a drastic reduction in
loss of precious lives.
It is very possible to design a cost-effective and more portable ACPR device
using simple electronic components. We propose to employ high torque
motors for rotary to rectilinear conversion which can achieve the desired
results in a fraction of the existing market price. We have designed a prototype
of such a device to demonstrate its principle of working. This can be further
tweaked to suit the needs of the Indian Biomedical market.
The basic idea of the project is to have a localized thumping piston-like rod
above the chest of the patient. We propose the use of a suitable DC motor to
achieve this goal. Though the entire apparatus relies heavily on mechanical
components like the L-arm, circular disc, adjustable stands, etc, there is scope
to further develop electronic assembly for the same. The apparatus that we
have in place can be hooked up to various vital parameter acquisition systems
such as ECG electrodes and also provide for defibrillator and ambubag as per
standard WHO protocol.
7

CHAPTER 1: INTRODUCTION
In India, general awareness of CPR techniques is limited to physicians and
paramedics. There exists a shocking lack of awareness about resuscitation
techniques in common public circles. When administered precisely, CPR can
save thousands of lives each year that are lost due to causes ranging from
physiological shocks such as asphyxiation due to drowning; to even sudden
myocardial infarction/ cardiac arrest (SCA).
It is proposed that designing a device which can administer the technique with
minimal human intervention can help reduce failure rates drastically. This is
because manual CPR, when performed even by qualified professionals does
have enough room for error. Automated CPR aims to eliminate these errors,
thereby reducing failure rates. The objective is to make the technique available
in rural areas where there is acute shortage of basic healthcare facilities. To
achieve this goal, it is intended to design an easy-to-use device that can even
be operated by a lay man.
When done manually, it is difficult to abide by WHO standards since it is a
life-saving technique and will need to be carried out with the required
specifications for as long as needed. This is very difficult to achieve manually.
Hence, the objective is to study the principle of administering
cardiopulmonary resuscitation manually, thereby extending the technique
mechanically by use of an automated apparatus that uses inexpensive
mechanisms to achieve the same.
This involves calculating the displacement, force and frequency of chest
compressions prescribed as per WHO standards. To identify target areas that
such equipment can cater to. For example, beaches, swimming pools, aircraft,
ambulances, etc. The final objective of the project is to study the practical
viability of implementing microcontroller-based timing devices to drive the
mechanism for predefined periods of time as required.
8

CHAPTER 2: REVIEW OF LITERATURE
2.1 MANUAL CPR vs AUTOMATED CPR:
To understand the problems that are faced by paramedics while delivering
Manual CPR and to then compare it with the capabilities of Automated CPR,
the following table of is presented below:
WHO Standards specify the following conditions to be maintained for manual
CPR, hence our aim was to fabricate a machine which would do at the same
time circumventing the disadvantages of manual CPR.
Rate of chest compressions- at least 100 chest compressions per minute
(administered 30 compressions at a time, pause equivalent to two breaths
taken to check for resumption of pulse)
Vertical Displacement- 1.5 to 2 inches
9

2.2 CPR GUIDELINES:
The normal procedure to be followed when a person encounters a real life
situation in which a victim needs to be resuscitated is described below:
a. IDENTIFICATION:
The first step of CPR is to try to arouse the victim if found unconscious. The
person simply might have fainted or maybe a asleep. Shake the person and call
them out loudly. If there is no response, only then do we proceed to theCPR
procedure.
b. FUNCTION:
Check for his/her breathing. We do this by leaning close on the victim's mouth
and nose and listening for their breathing sounds. If breathing is felt, there is
no need of rescue breathing.
c. TIME FRAME:
A call for medical help should be made before beginning CPR procedures. It is
important to get medical assistance as quickly as possible because CPR is a
tiring procedure and it cannot be done for a long time. The paramedics should
be on their way while CPR is being given, this improves the victim's chances
of survival. Even though the person is breathing, the victim could have other
medical problems that need immediate attention.
d. FEATURES:
The head has to be rightly positioned before the rescue breathing. This is done
by tilting the head by lifting the chin. Pinch the nose and give the person two
quick breaths. For each breath make sure that the chest is rising and falling,
this signifies that the airway is clear and the air is reaching the lungs. If not
then reposition the head and try again. If the chest still does not inflate due to
10

the air, clear the airway before going ahead. This is done with the Heimlich
maneuver, once the airway is cleared, repeat the two rescue breaths and
continue with the CPR.
e. POTENTIAL:
Check for pulse and breathing. After the two breaths, check for the breathing
as you did before. Also place two fingers on the pulse point on the side of the
neck below the ear and just above the collar bone. If the victim is breathing
then it means that the heart is beating as well. Monitor the patients until the
paramedics arrive. If there is a pulse, but no breathing then continue the rescue
breathing until the victim begins to breathe or till the paramedics arrive to take
over. If there is no pulse and no breathing continue CPR until help arrives.
f. CONSIDERATIONS:
Measure the width of two fingers above the bottom of the breastbone. Place
the palm of your hand against the breastbone so the side of the hand is above
the fingers. Cover the first hand with you other hand and interlace your
fingers. With your elbows locked, give 30 chest compressions. The downward
force should be enough to depress the breastbone approximately 2 inches.
g. PREVENTION/SOLUTION:
Give two more breaths as described before. The process id breaths and chest
compressions should be repeated until help arrives or until the victim starts
breathing on his own
11

2.3 LIFE-STAT vs AUTOPULSE vs LUCAS:
Before conceiving a new and efficient design, it was important to review the
existing products in the market. Here is a comparison between the three
available products currently in use in the US market:
The Zoll Autopulse uses an inflatable belt that autonomously surrounds the
chest. This belt compresses the entire thoracic area. Due to this, cases of rib
fracture have been reported in patients who have been administered automated
chest compressions using this device.
Michigan Instruments’ Lifestat is a device that administers localized
compression only on the desired region. However, the piston-like action of the
Lifestat is triggered using a pneumatic cylinder which is heavy. Due to this, it
scores low on the portability count.
Another competing product is the Lucas, which is similar in principle to the
Lifestat. Oral resuscitation is also taken care of in this model. The common
shortcoming associated with all the three devices is their high cost. Average
cost of existing models is around Rs. 12 lakh.
12

13

From the above comparative study it could be inferred that the approach
followed by Michigan Instruments would be the one we would use to
implement the project. The reasons for selecting this product as the one to
model the project on, are reinstated from the table above.
14

CHAPTER 3: DESIGN
The block diagram below illustrates the flow of the project with the various
Electronic and Mechanical components used and their functional description:
Fig 3.1: Illustration of the entire system diagram
Power Supply
In the current prototype, an AC to DC alternator is being used to get power
from mains and drive the DC motor. In the final product, a DC battery can be
used. This battery could be lithium ion or lead acid type, depending on
feasibility and cost considerations.
Electronic control
Currently, IC 555 is being used as a timer to adhere to the compression criteria
mentioned by the World Health Organization. In the future, more specialized
microcontrollers and timing devices can be used to replace it.
15

Mechanical elements
The base plate, disc, rod and the L-arm form the basic building blocks of the
device. These are explained in the subsequent chapters
3.1 HARDWARE:
Before zeroing in on any one design for our project, we analyzed various
options before short listing one that fulfilled all requirements satisfactorily,
while also being practically feasible.
3.1.1 BELT DESIGN:
This design involves the use of a lower unit that is slid under the patient. An
upper unit is fit with a toothed gear motor and two gear tracks- surrounding
the gear from above and below respectively. These two tracks are secured to
the lower unit with the help of hooks. When the gear moves anticlockwise, the
tracks advance in opposite directions linearly. Because of this, the upper unit
compresses the patient’s chest. When the motor rotates in the clockwise
direction, it returns to its original elevated position. This process is repeated
continually to achieve sustained compressions.
Fig 3.2: Illustration of the belt design
16

A major drawback of this design is the point of application is not localized to
the heart. It is bulky and involves the implementation of a gear that moves
electronically in one direction, as well as mechanically in the other. This
forced us to look for other designs to implement our idea.
3.1.2 SPRING DESIGN
Our second design consideration consisted of a motor around whose axle, a
high tension cord is wound. This cord passes through a tensile spring and an
applicator cushion is attached at its end. A narrow opening in the base on
which the motor rests, restricts the compression of the spring beyond a
particular limit. When the motor rotates in the anticlockwise direction, the
spring compresses by about 2 inches. This raises the applicator cushion just
above the patient’s chest. When the motor is switched off, the spring expands
freely in the absence of a puling force from the motor, which causes the
applicator cushion to compress the patient’s chest.
Fig 3.3: Illustration of the Spring Design
Finding a suitable spring that matches the requirements of stipulated Young’s
modulus and rigidity was a major hurdle in this design and was more of a trial
and error exercise than a calculated inference. Wear and tear of the spring
17

could reduce the life of the spring and in course of time, the response of the
spring to the load would considerably vary than what is expected.
3.1.3 CAM DESIGN
The third design involves the use of a cam which has a groove of a suitable
depth to facilitate a displacement of 2 inches as previously mentioned. A rod
suspended vertically at the apex of the spring (or any mechanically
compressible element) would move about its fulcrum to give us the required
linear motion. At the other end of the rod, the applicator cushion would be
attached. According to the position of the fulcrum, the displacement could be
magnified. The number of grooves could be increased to provide us with an
increased number of compressions.
Fig 3.4: Illustration of CAM Design
Again, the use of a spring poses a hurdle to the life span of the apparatus.
3.1.4 MAGNETIC FIELD DESIGN
A few design options using magnets surrounded by intermittent magnetic
fields that drive the compression rod were also considered. One of the ideas
involved the use of two magnetic fields that are two inches apart from each
other. These two fields are switched on alternately. When the upper field is
18

switched on, the rod is pulled up and when it is switched off, the lower
magnetic field pulls it down. The upper magnetic field could be replaced by a
spring to pull the rod up. A motor rotating in the anticlockwise direction could
also be used for the same.
Another design makes use of two ferromagnetic elements, one forming the
core of an induced magnetic field formed by a conducting wire wound around
it. By using Faraday’s Law of Electromagnetic Induction, an AC supply when
passed through the conducting wire would magnetize the core and this would
attract the other ferromagnetic block whose other end would be connected to
the applicator cushion i.e. when the field is produced the cushion is pulled up
and when it is switched off, the cushion compresses the chest.
Fig 3.5: Illustration of Magnetic Field Design
A major disadvantage of this system is the fall of the rod that is controlled
only by the lower magnetic field. To produce an effective weight 11 kg, a very
heavy rod would have to be used which could harm the patient. Switching
magnetic fields on and off is easier said than done. The magnetic core takes a
considerable amount of time to get magnetized after current is supplied to the
coil. This design was theoretically appealing but practically challenging.
19

3.1.5 TWIN MOTOR DESIGN
The final design that could be implemented is using two rotating discs driven
by two motors. These two discs could either be cams or could 0have
projections on them. There would be a rod in between the two discs which
would have projections on it. The two motors should move in opposite
directions. The distance between the projections/grooves should be such that
the required displacement is achieved.
When one motor propels the rod in the forward direction, after the maximum
displacement, the other motor will pull it back to its original position. As a
result of this, by suspending this apparatus vertically, using an element to
prevent free fall of the rod, the required compressions can be obtained.
Fig 3.6: Illustration of Twin Motor Design
The drawback of this design is that two motors are used and that would
increase expenses and mechanical liability.
20

3.1.6 FINAL DESIGN
After analyzing the pros and cons of each of the above ideas, we came across
the works of an American scientist, William Clark who has developed various
mechanical assemblies that convert rotational motion to rectilinear motion.
One of these completely suited our needs of achieving vertical displacement
driven by a motor that is controlled electronically.
A rod is provided with a projection at one end and a restrictor block at the
other. A disc is fit with two diametrically opposite projections which drive the
vertical rod. An L-arm is placed on a pivot that moves in tandem with the
projections on the disc. This motion can be better explained with the diagram
below:
Fig 3.7: Illustration of Final Design
21

CHAPTER 4: IMPLEMENTATION AND TESTING
4.1 STAGE I:
For the first stage of the project, after finalizing the design, outlines of the
various components on paper cut-outs and card board were traced to measure
the vertical displacement that can be achieved using various dimensions of the
disc, the rod, the L-arm and the positions of the projections. When a vertical
displacement of around 2 inches was achieved, we implemented components
of the same dimensions on a wooden board to replicate the working of a life-
size model of the intended mechanical equipment.
Fig 4.1: Illustrations of the initial Cardboard Design and the subsequent Fabrication using wooden components
4.2 STAGE II:
4.2.1 MATERIALS TO BE USED:
To fabricate a sturdy and reliable device which would be capable of
delivering all the above mentioned specifications and at the same time be able
to support all the mechanical elements that we had in mind (motor, L-arm,
disc, applicator rod), we needed to use the proper kind of material.
Hence, Aluminium and Stainless Steel were opted for owing to their
inherent strength, ease of availability and economic viability.
22

4.2.2 STAGES IN FABRICATION OF THE DEVICE:
Base for mounting- We first started by sawing off a plate of
aluminium which would support all the necessary components to be mounted.
We smoothened the edges of the plate by using a grinder and filer to give it
rounded edges. The plate was then polished by using a buffing machine.We
then outlined the dimensions of the various components with a marker and
started preparing those components thereafter.
Rotating Disc- We first began by sawing off a square piece and then
filing it to get an appropriate circular shape. We also used a grinder to lessen
the amount of manual labour that would go into making a perfect circular disc.
Applicator rod and L-arm- These two components were cut out of a
single metal piece and then filing and buffing them to get the appropriate
shapes and dimensions that we needed.
4.2.3 MOUNTING ON THE BASE PLATE:
Circular Disc- Since this was the most important component of the
device which would be driven by the motor and would consequently drive the
applicator rod, we took extra care to provide it with the right kind of support,
without friction. For this, we drilled a hole at the center of the disc, on the base
plate, welded a rod onto a small circular disc (smaller than our circular disc)
through a shaft on the front side and the same way on the back side. This
meant that we had stability and at the same time, freedom of movement for the
disc.
Using nuts and bolts with washers we mounted our main circular disc onto this
assembly. We also made two readymade Teflon projections on the disc for
contact with the L-arm and Applicator rod during the actual working. The
instruments used for this purpose were the Welding Machine, Drilling
Machine, Tapping screws and the Lathe Machine.
23

L-arm and Applicator Rod- In order to avoid friction, the circular
disc was mounted at a height from the base plate. Owing to this fact, we had to
elevate the L-arm and the Applicator rod accordingly. Using the meter scale
and Vernier Callipers for getting the appropriate measurements, we mounted
first the L-arm on a single plastic cube support which in turn was screwed to
the base plate using a single screw. The L-arm was screwed onto this support
which acted as a pivot for its movement.
The applicator rod needed itself to be guided so that its movement would stay
strictly linear throughout the working of the device. This was accomplished by
using the plastic cubes with appropriate grooves at strategic heights being
sawed off of them. To maintain the guide cubes in position, two screws were
used to mount them on the base plate to provide the stability that was required
of them.
Onto the plastic rod was also mounted another Teflon projection for contact
with the L-arm. A spring was also affixed, its one end on a small screw
projecting from an area at the distal end of the rod and the other end on the
distal most plastic guide cube. This would ensure that there was no free fall
when the device was being set up just before application to the patient and
otherwise.
Motor- Since we needed to mount the motor in such a way that it had
stability while operating, which required it to be solidly mounted on the base
plate with adequate support.
The second consideration was the fact that we needed to be flexible in the
sense that we wanted to allow for the replacement of the motor in case we
needed higher driving power for the applicator rod.
For the above stated reasons we decided to use a bevelled gear which would
transfer the motion of the motor axle in the horizontal plane onto the circular
disc which would rotate in a plane perpendicular to the rotating axle of the
motor. The motor was supported using a thick aluminium plate which was
then grinded at the centre to accommodate the axle of the motor. This plate
24

was fixed to the base plate using screws at various points for stability. Two
triangular supports were then welded at the angle to avoid any bending that
may occur during the working.
Here we understood the use of the bending machine and also the Welding
machine.
Fig 4.2: Illustration of motor after mounting on the base plate
4.2.4 PATIENT PLATE AND ADJUSTABLE STAND:
The patient plate was again fabricated using an aluminium plate which was
sawed and filed to get blunt edges and then it was bent at an angle of 16
degrees to accommodate the feet of the stand which would be shifted into it
while setting up the device for use.
The Stand was made by using two hollow tubes which were welded onto bases
which resembled the front ends of shoes. A handle was also welded at the end
of the tube for easy handling. Springs were used to make easy adjustments
when the base plate was mounted onto the stands.
4.2.5 FINAL MOUNTING:
The Base plate with all its components safely mounted on it was now ready to
be mounted on the stand to make the device fully functional. This was
achieved by screwing to it two wing-like projections from either side. The
unscrewed ends of these projections were welded to hollow tubes which were
slightly larger in diameter than the tubes of the stand.
25

This meant that the tubes could easily slide and then be tightened wherever
necessary on the stand, which lent the all-important feature of height
adjustment to our device. Again, free fall was prevented by the springs on
the stands.
By simply placing the base plate under the patient’s chest, placing the base
plate on the stands, locking in the base of the stands on the under-side of the
patient plate and tightening the base plate to maintain its position, the system
would become one piece and function as a single unit by providing the motor
with power supply.
Fig 4.3: Illustration of Final Fabricated Product
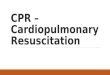
4.2.6 TIMING THE COMPRESSIONS:
For the purpose of abiding by the standards set by the WHO regarding the
time for which the compressions must be given and then paused while the
paramedic checks for the patient’s pulse, we used a simple IC 555 timer in the
astable mode so that we could control the On and Off times of the
multivibrator.
26

Since IC 555 can only source a current of around 200mA, it was important for
us to use a current driver which would give the appropriate amount of current
for the motor to be driven.
Fig 4.4: Illustration of Astable mode of operation of IC 555
a. IC 555 ASTABLE MODE OPERATION:
If we rearrange the circuit slightly so that both the trigger and threshhold
inputs are controlled by the capacitor voltage, we can cause the 555 to trigger
itself repeatedly. In this case, we need two resistors in the capacitor charging
path so that one of them can also be in the capacitor discharge path.
In this mode, the initial pulse when power is first applied is a bit longer
than the others, having a duration of 1.1(Ra + Rb)C. However, from then
on, the capacitor alternately charges and discharges between the two
comparator threshold voltages. When charging, C starts at (1/3)VCC and
charges towards VCC. However, it is interrupted exactly halfway there, at
(2/3)VCC. Therefore, the charging time, t1, is -ln(1/2)
(Ra + Rb)C = 0.693(Ra + Rb)C.
When the capacitor voltage reaches (2/3)VCC, the discharge transistor is
enabled (pin 7), and this point in the circuit becomes grounded. Capacitor
C now discharges through Rb alone. Starting at (2/3)VCC, it discharges
27

towards ground, but again is interrupted halfway there, at (1/3)VCC. The
discharge time, t2, then, is -ln(1/2)(Rb)C = 0.693(Rb)C
The total period of the pulse train is t1 + t2, or 0.693(Ra + 2Rb)C.
b. Calculations Used:
Ra=200kΩ; Rb=50kΩ; C=100µF
Hence, Ton=0.693(Ra+Rb)C = 17.325 sec
Toff=0.693RbC=3.465 sec
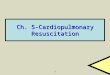
4.2.7 L293D MOTOR DRIVER:
The IC 555 is not capable of sourcing enough current to drive the motor. We
needed a current source in order to drive the motor. This current source
should be able to take in logic command from the IC, then boost current and
drive the motor accordingly. We had to select the IC for motor driving as per
the requirement of current of motor.
The L293D is a monolithic integrated high voltage, high current four-channel
driver designed to accept standard DTL or TTL logic levels. It is designed to
drive inductive loads such as relay solenoids, DC/stepper motors and
switching power transistors. The L293D’s ability to handle the load of my DC
motor makes it an ideal IC for driving our main motor.
28

Fig 4.5: Illustration of pin description of L 293D
As can be seen in the circuit, three pins are needed for interfacing a DC motor
(A, B, Enable). If you want the o/p to be enabled completely then you can
connect Enable to VCC and only 2 pins needed from controller to make the
motor work.
600mA output current capability per channel with1.2A peak output current.
Fig 4.6: Illustration of Final Hardware Interfacing
29

5. CONCLUSION
The objective of the project was to achieve a product which would be
economically viable so that the general population could use it; at the same
time an important consideration to be kept in mind was to achieve a
displacement and timing of compressions as close to WHO standards as
possible.
The approach selected to achieve automated chest compressions was
fabricated using aluminium, stainless steel and inexpensive hardware. The
project was successfully implemented so that it could circumvent the problems
faced while administering Manual CPR and also be easy to use with a minimal
amount of training. Any mechanical changes that need to be made are easily
achievable owing to the fact that the mounting of all the components on the
base plate is done keeping that very idea in mind.
With access to better hardware and raw materials, a marketable product can be
designed in the future. The mouth-to-mouth resuscitation part of CPR can be
looked into to make this design robust and worthy of competing with the
Michigan Instruments’ LifeStat.
30

6. FURTHER SCOPE
Using more versatile materials such as titanium, hard PVC and other plastic in
place of aluminium may be beneficial to add rigidity and stability to the
design. Materials that can make the product light-weight should be probed
into.
Research could be initiated in this direction to look for alternate materials that
could be used to design the skeleton of the device. With the help of
paramedical staff, an efficient mouth-to-mouth resuscitator can be added as an
accessory to make the product a suitable replacement for manual CPR.
The stand can be calibrated so that it becomes easier for the attendant
paramedical staff to adjust the stand to suit the patient’s physical
characteristics.
Another area that can be worked on is the software part, wherein, a
microcontroller can be used to drive the motor instead of the IC 555 which is
being employed currently. This would have the advantage of making the
system dynamic by interfacing the microcontroller to an LCD interface and
allowing the paramedical staff to tweak the number of compressions being
given.
31

7. REFERNCES
1. Christophe A. Wyssa; Julia Foxb, Fabian Franzecka; Marco Moccettia; Alfons Scherrerc; Jens P. Hellermannd; Thomas F. Lüschera; Mechanical versus manual chest compression during CPR in a cardiac catherisation setting, Cardiovascular Medicine 2010;13(3):92–96(http://www.cardiovascular-medicine.ch/pdf/2010/2010-03/2010-03-005.PDF)
2. http://www.jolife.se/en/clinical_background/sudden_cardiac_arrest
3. Ochoa FJ ; Ramalle-Gómara E; Lisa V; Saralegui I, The effect of rescuer fatigue on the quality of chest compressions, Resuscitation. 1998 Jun; 37(3):149-52. (http://www.ncbi.nlm.nih.gov/pubmed/9715774?ordinalpos=1&itool=EntrezSystem2.PEntrez.Pubmed.Pubmed_ResultsPanel.Pubmed_RVDocSum)
4. Hightower D ; Thomas SH; Stone CK; Dunn K; March JA, Decay in quality of closed-chest compressions over time, Annals of Emergency Medicine, 1995 Sep;26(3):300-3. (http://www.ncbi.nlm.nih.gov/pubmed/7661418?ordinalpos=1&itool=EntrezSystem2.PEntrez.Pubmed.Pubmed_ResultsPanel.Pubmed_RVDocSum)
5. Aufderheide TP ; Pirrallo RG; Yannopoulos D; Klein JP von Briesen C; Sparks CW; Deja KA; Kitscha DJ; Provo TA; Lurie KG, Incomplete chest wall decompression: a clinical evaluation of CPR performance by trained laypersons and an assessment of alternative manual chest compression-decompression techniques. Resuscitation, 2006 Dec;71(3):341-51. Epub 2006 Oct 27. (http://www.ncbi.nlm.nih.gov/pubmed/17070644?ordinalpos=5&itool=EntrezSystem2.PEntrez.Pubmed.Pubmed_ResultsPanel.Pubmed_RVDocSum)
6. Wik L ; Kramer-Johansen J; Myklebust H; Sørebø H; Svensson L; Fellows B; Steen PA, Quality of cardiopulmonary resuscitation during out-of-hospital cardiac arrest, The Journal of the American Medical Association. 2005 Jan 19;293(3):299-304. (http://www.ncbi.nlm.nih.gov/pubmed/15657322?ordinalpos=1&itool=EntrezSystem2.PEntrez.Pubmed.Pubmed_ResultsPanel.Pubmed_RVDocSum)
32

7. Wik L , Hansen TB; Fylling F; Steen T; Vaagenes P; Auestad BH, The Delaying defibrillation to give basic cardiopulmonary resuscitation to patients with out-of-hospital ventricular fibrillation: a randomized trial, The Journal of the American Medical Association.2003 Mar 19;289(11):138995. http://www.ncbi.nlm.nih.gov/pubmed/12636461?ordinalpos=2&itool=EntrezSystem2.PEntrez.Pubmed.Pubmed_ResultsPanel.Pubmed_RVDocSum)
8. Cobb LA ; Fahrenbruch CE; Walsh TR; Copass MK; Olsufka M; Breskin M; Hallstrom AP, Influence of cardiopulmonary resuscitation prior to defibrillation in patients with out-of-hospital ventricular fibrillation, The Journal of the American Medical Association. 2003 Mar 19;289(11):1434-6. (http://www.ncbi.nlm.nih.gov/pubmed/10199427?ordinalpos=8&itool=EntrezSystem2.PEntrez.Pubmed.Pubmed_ResultsPanel.Pubmed_RVDocSum)
9. Berg RA ; Hilwig RW; Kern KB; Ewy GA, Precountershock cardiopulmonary resuscitation improves ventricular fibrillation median frequency and myocardial readiness for successful defibrillation from prolonged ventricular fibrillation: a randomized, controlled swine study, Annals of Emergency Medicine, 2002 Dec;40(6):571-4. (http://www.ncbi.nlm.nih.gov/pubmed/12447331?ordinalpos=1&itool=EntrezSystem2.PEntrez.Pubmed.Pubmed_ResultsPanel.Pubmed_RVDocSum)
10. Steen S ; Liao Q; Pierre L; Paskevicius A; Sjöberg T, The critical importance of minimal delay between chest compressions and subsequent defibrillation: a haemodynamic explanation, Resuscitation, 2003 Sep;58(3):237-47. (http://www.ncbi.nlm.nih.gov/pubmed/12969599?ordinalpos=1&itool=EntrezSystem2.PEntrez.Pubmed.Pubmed_ResultsPanel.Pubmed_RVDocSum)
11. Edelson DP ; Abella BS; Kramer-Johansen J; Wik L; Myklebust H; Barry AM; Merchant RM; Hoek TL; Steen PA; Becker LB, Effects of compression depth and pre-shock pauses predict defibrillation failure during cardiac arrest, Resuscitation, 2006 Nov;71(2):137-45. Epub 2006 Sep 18. (http://www.ncbi.nlm.nih.gov/pubmed/16982127?
33

ordinalpos=1&itool=EntrezSystem2.PEntrez.Pubmed.Pubmed_ResultsPanel.Pubmed_RVDocSum)
12. Jones AY ; Lee RY, Cardiopulmonary resuscitation and back injury in ambulance officers., Internation Archive of Occupational and Environmental Health, 2005 May;78(4):332-6. Epub 2005 Apr 13. (http://www.ncbi.nlm.nih.gov/pubmed/15827758?ordinalpos=1&itool=EntrezSystem2.PEntrez.Pubmed.Pubmed_ResultsPanel.Pubmed_RVDocSum)
34

APPENDIX I: IC 555 MULTIVIBRATOR
35

36

37

38

39

APPENDIX II : L293 D MOTOR DRIVER
CONSTRUCTION:
40

BREADBOARD USE:
41

PERFORMANCE CHARACTERISTICS:
42

SCHEMATICS:
43

ACKNOWLEDGEMETS
We take this opportunity to express our gratitude towards our guide Prof. (Dr.)
Mita Bhowmick, Head of the Department of Biomedical Engineering,
Thadomal Shahani Engineering College, Mumbai for her constant
encouragement and guidance.
We would also like to thank Mr. Praveen Valsalan. We are grateful for his
innovative ideas, eager participation in helping us fabricate the design and for
allowing us to use his workshop for the duration of this entire endeavor.
We would like to thank Mr. Tanvir Daphedar, Lecturer, Biomedical
Engineering Department, Thadomal Shahani Engineering College for
constantly providing us with vital and ingenious ideas for the implementation
of our plans.
Meryl Michael Rodrigues
Rishabh Manoj Shetty
Ashish Dilip Vaswani
44