Embed Size (px)
Citation preview

ARTIFICIAL NEURAL
NETWORKS PARAMETERS
Setting ARTIFICIAL NEURAL
NETWORKS PARAMETERS

NEED FOR SETTING PARAMETER VALUES
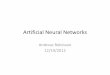
1. LOCAL MINIMA w1 – Global Minima w2, w3 – Local minima
W1 W2 W3
1
3 2
Erms
Erms
min

NEED FOR SETTING PARAMETER VALUES
2. LEARNING RATE Small learning rate – Slow and lengthy
learning Large learning rate –
Output may saturate or may swing across desired. May take too long to train.
3. Learning will improve and network training will
converge if inputs and outputs are statistical i.e. numeric.

TYPES OF TRAINING Supervised Training
•Supplies the neural network with inputs and the desired Outputs
• Response of the network to the inputs is measured
•The weights are modified to reduce the difference between the actual and desired outputs Unsupervised Training
•Only supplies inputs
•The neural network adjusts its own weights so that similar inputs cause similar outputs
•The network identifies the patterns and differences in the inputs without any external assistance

I.INITIALISATION OF WEIGHTS
Larger weights will drive the output of layer 1 to saturation.
Network will require larger training time to emerge out of saturation.
Weights chosen as :- Small weights
between -1 and 1
Or
between -0.5 and 0.5

INITIALISATION OF WEIGHTS
PROBLEM ITH THIS CHOISE:
If some of input parameters are very high, they will predominate the output.
e. g. x = [ 10 2 0.2 1]
SOLUTION:
Weights are initialized as inversely proportional to input.
Output will not depend on any individual parameters, but total input as a whole.

RULE FOR INITIALISATION OF WEIGHTS
Weight between input and 1st layer: P vij = (1/2P) ∑p=1 (1/|xj|)
P is total no of input patterns.
Weight between 1st layer and output layer: P wij = (1/2P) ∑p=1 (1/ f(∑ vij xj )

II. FREQUENCY OF WEIGHT UPDATES Per pattern training: Weight changes after every
input is applied. Input set repeated if NN is not trained yet. Per epoch training: Epoch is one iteration through the
process of providing the network with an input and updating the network's weights
Many epochs are required to train the neural network
weight changes as suggested by every input are accumulated together into a single change at the end of each epoch i.e. set of patterns.
No change in weight at end of each input. Also called BATCH MODE training

FREQUENCY OF WEIGHT UPDATES
Advantages / Disadvantages Batch mode training not possible for on-
line training. For large applications, with large training
time, parallel processing may reduce time in batch mode training.
Per pattern training is more expensive as weight changes more often.
Per pattern suitable for small NN and small data set

III. LEARNING RATE
FOR PERCEPTRON TRAINING ALGORITHM
Too small η – Very slow learning Too large η – Output may saturate on one
direction.
η = 0 --- no weight change η = 1 --- Common Choice

PROBLEM WITH η = 1 If η = 1 ∆w = ± x New Output = (w + ∆w)t x Output = wtx ± xtx Here if wtx > xtx output will always be positive
and grows in one direction only. Should be - wtx < ∆wtx ∆w = ± x η |xtx| >| wtx |
η > | wtx | / |xtx|
η is normally between 0 and 1.

III. LEARNING RATE FOR BACK PROPAGATION ALGORITHM Large η in early iterations and steadily
decrease it when NN is converging. Increase η at every iteration that improves
performance by significant amount and vise versa.
Steadily double the η untill error value worsens. If Second derivative of E, ▼2E is constant and
low, η can be large. If Second derivative of E, ▼2E is large, η can be
small. For above, more computation required.

MOMENTUM
•Training done to reduce this error.
•Training may stop at local minima instead global minima.

MOMENTUM
Can be prevented if weight changes depend on average gradient of Error, rather than gradient at a point.
Averaging δE/ δw in a small neighborhood leads the network in general direction of MSE decrease without getting stuck at local minima.
May become complex.

MOMENTUM
Shortcut method: Weight change at ith iteration of back
propagation algorithm also depends on immediately preceding weight changes.
This has an averaging effect. This diminishes drastic fluctuations in weight
changes over consecutive iterations. Achieved by adding momentum to weight
update rule.

MOMENTUM
Δwkj(t+1) = ηδkxi + α∆wkj(t) ∆wkj(t) is weight change required at time t . α is a constant . α ≤ 1. Disadvantage: Past training trend can strongly bias current
training. α depends on application. α = 0, no effect of past value. α = 1, no effect of current value.

What constitutes a “good” training set?
Samples must represent the general population Samples must contain members of each class Samples in each class must contain a wide range
of variations or noise effect

GENERALIZABILITY
Occurs more in large NN with less inputs. Inputs are repeated while training till error
reduces. This leads to network memorizing the inputs
samples. Such trained NN may behave correctly with
training data but fail with any unknown data. Also called over training.

GENERALIZABILITY- SOLUTION
The set of all known samples is broken into two orthogonal (independent) sets:
Training set - A group of samples used to train the neural network
Testing set - A group of samples used to test the performance of the neural network ◦ Used to estimate the error rate
Training continues as long as error to test data gradually reduces.
Training terminates as soon as error on test data increases.

GENERALIZABILITY
E
time
Error on test data
Error on training
data
Time when error on test data starts to increase
•Performance over test data is monitored over
several iterations, not just one iteration.

GENERALIZABILITY Weight will NOT change on test data. Overtraining can be avoided by using small
number of parameters (hidden nodes and weights).
If size of training set is small, multiple sets can be created by adding small randomly generated noise or displacement.
X = { x1, x2, x3…..xn} then X’ = { x1+ß1, x2+ß2, x3+ß3… xn + ßn}

NO. OF HIDDEN LAYERS AND NODES
Mostly obtained by trial and error. Too few nodes – NW may not be efficient. Too large nodes –
Computation is tedious and expensive.
NW may memorize the inputs and perform poorly on test data.
NW is called well trained if performs well on data not used for testing.
Hence NN should be capable of generalizing from input, rather than memorizing the inputs.

NO. OF HIDDEN LAYERS AND NODES
Methods: Adaptive algorithm- ◦ Choose large number of nodes and train.
◦ Gradually discard nodes one by one during training.
◦ Train till performance reduces below unacceptable level.
◦ NN to be retrained at each change in nodes.
◦ Or vice versa
◦ Choose small number of nodes and increase nodes till performance is satisfactory.

Let’s see how NN size advances:
Linear Classification:
L1 ax1+bx
2+c>0
ax1+bx
2+c<0
L1

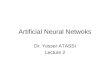
Let’s see how NN size advances:
Two class problem - Nonlinear
L1
L2 L11
L1
L2

Let’s see how NN size advances:
Two class problem - Nonlinear
L1
L2 L11
L3
L4
L1
L2
L3
L4
P

Let’s see how NN size advances:
Two class problem - Nonlinear
L22
P P1
P2
P3
P4
P1
P4
P2
P3

L22
P1
P2
P3
P4
L11
L11
L11
L11

NUMBER OF INPUT SAMPLES
As a thumb rule: 5 to 10 times as many samples as the number of weights to be trained.
Baum and Haussler suggest:
◦ P > |w| /(1-a) ◦ P is number of samples,
◦ |w| is number of weights to be trained,
◦ a expected accuracy on test set.

Non-numeric inputs
Nonnumeric inputs like colours have no inherent order.
Can not be depicted on an axis e.g. red-blue-green-yellow.
Colour becomes position sensitive. Results in Erroneous training.
Hence assign binary vector with component corresponding to each colour. e.g.
Green – 0 0 1 0 red – 1 0 0 0
Blue – 0 1 0 0 yellow – 0 0 0 1
But dimension increases drastically

Termination criteria “Halt when goal is achieved.” Perceptron training of linearly separable patterns – ◦ Correct classification of all samples.
◦ Termination is assured if ƞ is sufficiently small.
◦ Program may run indefinitely if ƞ is not appropriate.
◦ Different choice of if ƞ may yield classification.
Back propagation algorithm using delta rule– ◦ Termination can never be achieved with above criteria as
output can never be +1 or -1.
◦ Will have to fix Emin , the minimum error acceptable. Terminates as error goes below Emin.

Termination criteria Perceptron training of linearly non-separable
patterns – ◦ Above criteria will allow procedure to run indefinitely.
◦ Compare amount of progress in recent past.
◦ If number of misclassification has not changed in large step, samples are not linearly separable.
◦ Can fix limit of minimum % of correct classification for termination.