Embed Size (px)
Citation preview

Representing Graphs by Touching Domains
Nazli Temur

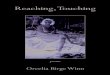
Koebe’s Theorem
Let G be a 3-connected planar graph.
Then, one can assign to each node i a circle Ci in the plane
So that their interiors are disjoint,
Two nodes are adjacent if and only if the corresponding circles are tangent.

Definitions Planar Graph : A graph is planar if it can be drawn in a plane without graph edges crossing. (Wilson 1975, p. 162)
3-Connected Graph:A graph G is said to be k-connected, if there does not exist a set of k-1 vertices whose removal disconnects the graph,(Skiena 1990, p. 177).
n-Polyhedral Graph: It is a 3-connected simple planar graph on n nodes.

Definitions Tangent Circles (Kissing Disks): Set of disks with non overlapping interior. Two circles with centers at (xi, yi) with radii r_i for i=1,2 are mutually tangent if
Dual Graphs : The dual graph G* of a polyhedral graph G has graph vertices each of which corresponds to a face of G and each of whose faces corresponds to a graph vertex of G.
Polyhedral graphs have unique dual graphs.
Planar graphs preserves the idea of nearest neighborhood in which connections are established between nearest neighborhood. This gives the opportunity to draw them on plane without intersection. So non of the curves intersect. This means interiors are disjoint.

Proof PreparationBrower's Fixed Point Theorem
x-x 0

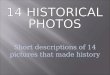
ProofSum of all the faces that have a point correspondence on p equals to 2π. This is true only when the circle is tangent.
2π
If we define the defect ratio as below.
As a part of calculation what we obtain is ,
So now we can claim there exist function Φ in which, for a set of points inputs radius ru and outputs defect δu, then the defect equals to δu =0.
Lemma 6.1.4 If radii ru > 0 (u 2 U) are chosen so that we have ±u = 0 for all u 2 U, thenthere is a double circuit representation with these radii.(tangency is present)

ProofThe defect vector δ(r) depends on the ratio of the ru only; hence we may restrict our attention to positive radii satisfying
Here the assumption is that total radius is less than equal to one. Suppose not, we can always contract the space to have points closer. Or if we reduce all the radii by half, ru (sum of r) reduces by half, if we keep doing then the sum becomes <=1.
Lets define a new function γ takes u input elements and outputs u elements. When γ takes (ru) elements it outputs ru+δu.
Now, if we assume that

ProofNow, if we assume that and
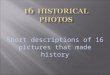
The domain of this function is in a plane IR2 is x+y<=1 which forms a triangle. Then, because radius can not be less than 0, rus going to be positive; If we think of higher dimensions, it will form a convex region which includes point set inside.
So the domain is a convex shape. We have to ensure that the range is contained within the shape.
As it is mentioned at section 6.1.5 , summation of δ is referred as 0.
The range of our function is ru+ δu, by adding ∑ r+ δ <=1 which means it is contained within the region. (closed)
So this function goes from a convex set to a convex set. Hence it must have a fixed point.
It follows that there is a (unique) point r in the interior of Σ with δ(r) = 0, and the sequence r^k tends to this point.
1
1

The reverse case
Touching circles are useful to
obtain planar graph , as well.

Open Points

Thanks!