Embed Size (px)
Citation preview


Gli APR sono aeromobili caratterizzati dall’assenza del pilota a bordo, il quale può trovarsi a terra oppure a bordo di un altro veicolo oppure
essere del tutto assente.

Eliche
Frame
Payload
Gimbal Motori
Batterie IMU+GPS

Il frame è la struttura principale di un multirotore, dove vengono fissati i motori e l’elettronica. Il frame deve
essere robusto e leggero

Di derivazione russa, sono la tipologia di batterie più usata, poiché grazie alla loro
composizione erogano altissime correnti e hanno un peso relativamente basso.

I motori hanno un ruolo fondamentale e vanno scelti in base al tipo di multirotore, alle modalità di volo
previste, e al peso. Generalmente vengono utilizzati motori brushless (senza spazzole)

Il regolatore o ESC è un dispositivo elettronico che permette di far funzionare i motori in base alla quantità di potenza che gli viene fornita dal
radiocomando.
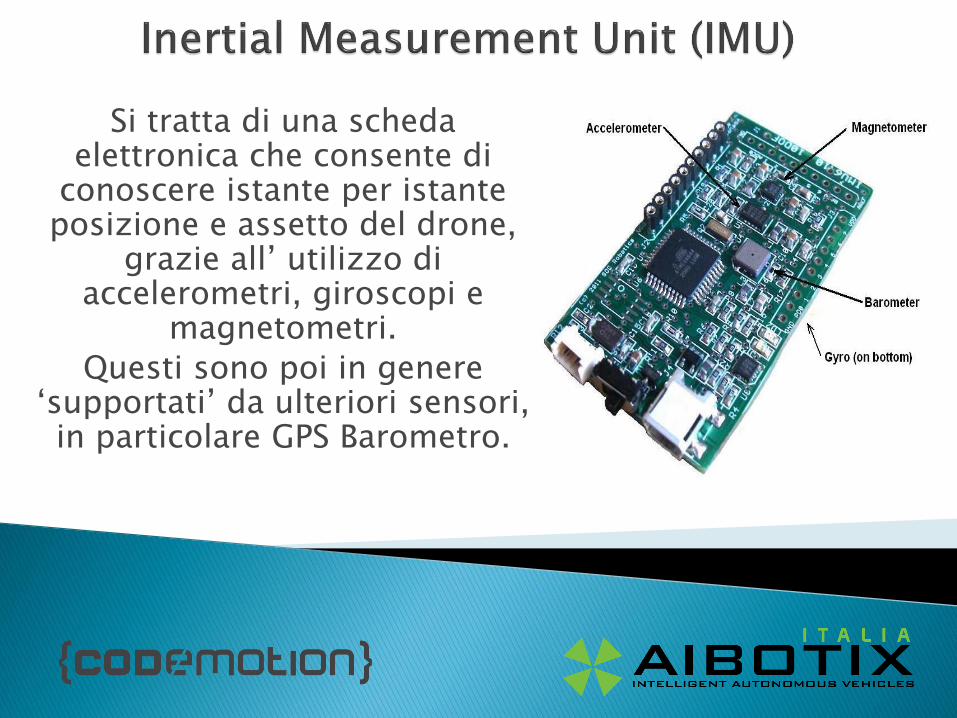
Si tratta di una scheda elettronica che consente di
conoscere istante per istante posizione e assetto del drone,
grazie all’ utilizzo di accelerometri, giroscopi e
magnetometri.
Questi sono poi in genere ‘supportati’ da ulteriori sensori, in particolare GPS Barometro.
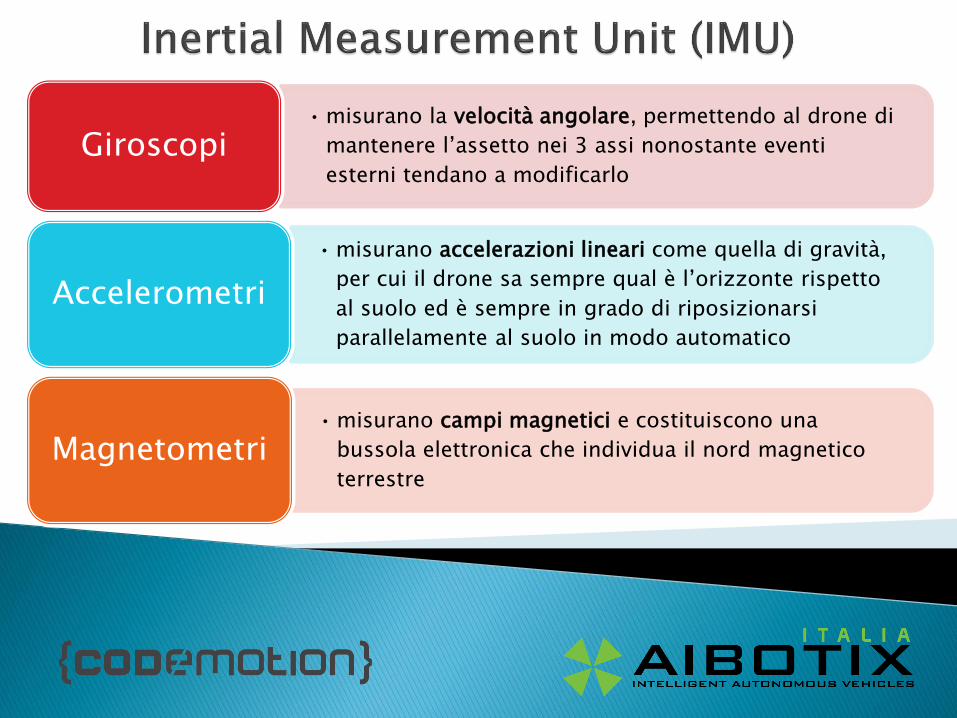
• misurano la velocità angolare, permettendo al drone di
mantenere l’assetto nei 3 assi nonostante eventi
esterni tendano a modificarlo
Giroscopi
• misurano accelerazioni lineari come quella di gravità,
per cui il drone sa sempre qual è l’orizzonte rispetto
al suolo ed è sempre in grado di riposizionarsi
parallelamente al suolo in modo automatico
Accelerometri
• misurano campi magnetici e costituiscono una
bussola elettronica che individua il nord magnetico
terrestre
Magnetometri
Al fine di supportare e migliorare la funzionalità dell’IMU, anche i seguenti sensori sono montati a bordo, generalmente sulla stessa scheda di montaggio per mantenere gli assi di riferimento
Barometro
• misura la pressione atmosferica,
quindi rileva le variazioni di
pressione dovute al cambio di
quota e grazie a questo è in grado
di far mantenere al drone sempre
la stessa altitudine.
GPS
• individua la posizione sul globo
terrestre ed è il dispositivo che
permette di classificare il
multirotore (o l’ala fissa) come
drone: infatti grazie al GPS il
drone ha la capacità di gestire
autonomamente delle missioni
programmate.
Il Sistema di Posizionamento Globale è un sistema di posizionamento e navigazione satellitare civile che, attraverso una rete satellitare dedicata di satelliti
artificiali in orbita, fornisce ad un ricevitore GPS informazioni sulle sue coordinate
geografiche ed orario.
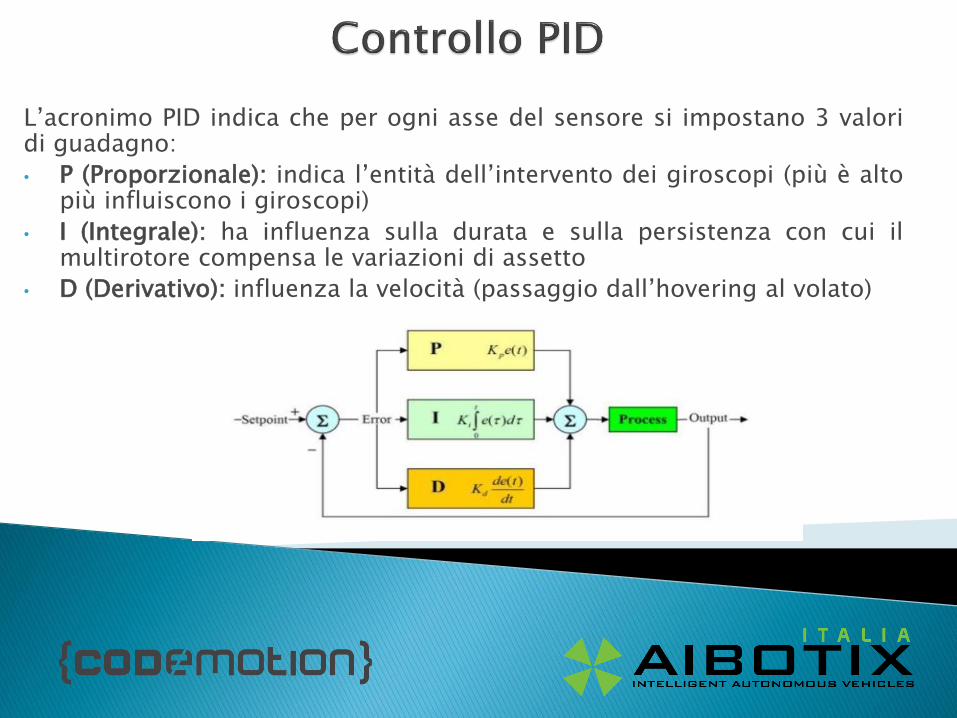
L’acronimo PID indica che per ogni asse del sensore si impostano 3 valoridi guadagno:
• P (Proporzionale): indica l’entità dell’intervento dei giroscopi (più è altopiù influiscono i giroscopi)
• I (Integrale): ha influenza sulla durata e sulla persistenza con cui ilmultirotore compensa le variazioni di assetto
• D (Derivativo): influenza la velocità (passaggio dall’hovering al volato)

La gimbal (o piattaforma inerziale) è un supporto per sensori (payload) solitamente stabilizzato su 2 o 3 assi e collegato ad un apposito sistema di
stabilizzazione o direttamente all’ elettronica di bordo, che permette il movimento automatico della camera per compensare le oscillazioni del
drone in volo e ottenere immagini quanto più stabili possibili.

Si trasmette su un canale di comunicazione secondario, oltre alla RC.
Il canale di comunicazione si realizza tramite due moduli Rx-Txcollegati con la porta seriale di un PC a terra.
Tramite la telemetria è possibile:
Monitorare i parametri di
volo
• Posizione
• Orientamento
• Velocità
• Tensione e corrente batteria
• Modalità di volo
• Stato del GPS
• …
Impartire comandi dalla
stazione a terra
• Modificare parametri di volo
• Inserire/modificare
waypoints per volo
autonomo
• Effettuare RTL (Return To
Launch)
• Navigare tramite
joypad/joystick
• …
Per la gestione dell’ unità è sempre presente un software per le impostazioni di parametri necessari al volo.
In base alle funzionalità disponibili è possibile controllare i parametri ad esse legati.
Esempio: se il mezzo è dotato di funzionalità RTH (return to home) sarà possibile impostare la quota alla quale dovrà rientrare sul punto di decollo.
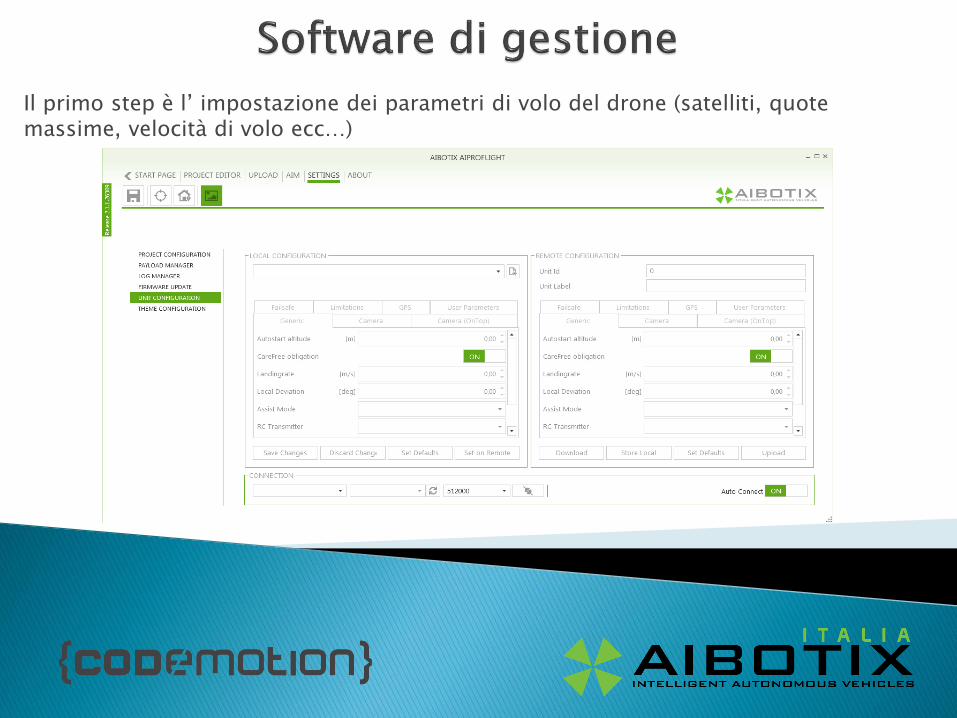
Il primo step è l’ impostazione dei parametri di volo del drone (satelliti, quote massime, velocità di volo ecc…)

Una volta impostati i dati di volo al drone il software permette di far effettuare voli pianificati al mezzo grazie all’ausilio del GPS.

SCIAMI: si punta al controllo non più di un solo drone, ma di un sistema di droni in grado di interagire tra loro.
TEACHING: alcuni software sono già in grado di far «ricordare» al drone un volo gestito da pilota per poi ripeterlo esattamente in maniera automatica.
SORVEGLIANZA: in situazioni di emergenza, allo scattare di un allarme, un drone (o uno sciame di droni) si potrà alzare in volo autonomamente.
MONITORAGGIO DEL TRAFFICO: un drone sarà in grado di seguire un «target» nel traffico per monitorarne la durata del tragitto.
FOLLOW ME: l’ idea è quella di far seguire al drone il proprio pilota il quale potrà intereagirci anche in maniera vocale.
INVENTAIR: si sta lavorando su questa funzione che permetterà al drone di trovare un prodotto inventariato all’ interno di un grande magazzino.
• Ispezioni infrastrutture.
• Termografia.
• Fotogrammetria.
• Agricoltura di precisione.
• Modellazione 3D.
• Monitoraggio ambientale.
• Archeologia preventiva.
• Sorveglianza.
• Gestione emergenze.
• Stato di avanzamento lavori grandi opere (SAL)
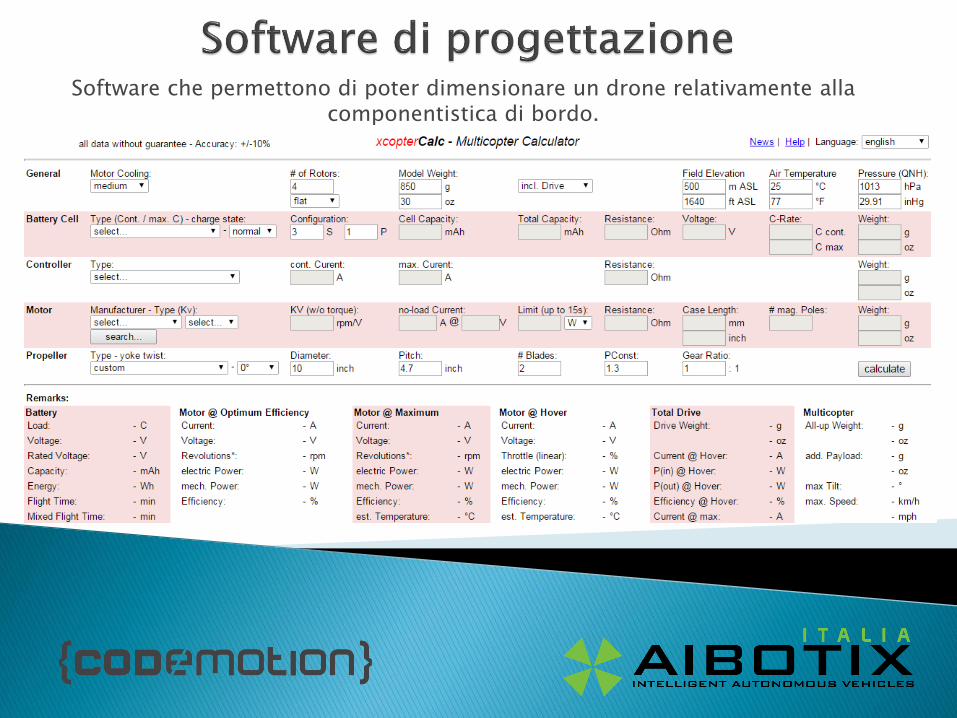
Software che permettono di poter dimensionare un drone relativamente alla componentistica di bordo.