Embed Size (px)
DESCRIPTION
Introduction to Artificial Neural Networks
Citation preview

1
ARTIFICIAL NEURAL NETWORKS
End of Semester Presentation
Presented by:Saif Al Kalbani 39579/12
20-05-2014
ECCE6206Switching Theory: Design and PracticeSpring 2014
Sultan Qaboos UniversityCollege of Engineering
Department of Electrical and Computer Engineering

2
Outline
Introduction General Architecture Learning Examples Applications Neuro-Fuzzy Conclusion

3
Applications
Input is high-dimensional discrete or real-valued (e.g. raw sensor input)
Output is discrete or real valued Output is a vector of values Form of target function is unknown Control System
Transfer function with huge number of inputs
Unknown transfer function

4
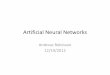
General Architecture
Network Interconnections Layers
Input layers Hidden layers Output layer
Inp
uts
Output

5
General Architecture

6
General Architecture
Threshold switching units Weighted interconnections among units Highly parallel, distributed processing Learning by tuning the connection weights

7
General Architecture

8
General Architecture
• Layers• Activation function• Learning

9
Layers
• The input layer.– Introduces input values into the network.– No activation function or other processing.
• The hidden layer(s).– Perform classification of features– Two hidden layers are sufficient to solve any
problem– Features imply more layers may be better
• The output layer.– Functionally just like the hidden layers– Outputs are passed on to the world outside the
neural network.

10
Examples

11
Activation Function

12
Learning
• Adjust neural network weights to map inputs to outputs.
• Use a set of sample patterns where the desired output (given the inputs presented) is known.
• The purpose is to learn to generalize– Recognize features which are common to
good and bad exemplars– Types
– Supervises– Unsupervised

13
Supervised Learning
Training and test data sets Training set; input & target

14
Learning
wi = wi + wi
wi = (t - o) xi
t=c(x) is the target value o is the perceptron output Is a small constant (e.g. 0.1) called learning rate
• If the output is correct (t=o) the weights wi are not changed
• If the output is incorrect (to) the weights wi are changed such that the output of the perceptron for the new weights is closer to t.
The algorithm converges to the correct classification• if the training data is linearly separable and is sufficiently
small

15
Learning
For ANDA B Output0 0 00 1 01 0 01 1 1
t = 0.15
y
x
W = 0.0
W = 0.0
x y Summation Output
0 0 (0*0.0) + (0*0.0) = 0.0 0
0 1 (0*0.0) + (1*0.0) = 0.0 0
1 0 (1*0.0) + (0*0.0) = 0.0 0
1 1 (1*0.0) + (1*0.0) = 0.0 0
T-o=1wi = (t - o) xi
=0.1wi=(1)*1*0.1=0.1Then Add 0.1 to the weights

16
Learning
For ANDA B Output0 0 00 1 01 0 01 1 1
t = 0.15
y
x
W = 0.1
W = 0.1
x y Summation Output
0 0 (0*0.1) + (0*0.1) = 0.0 0
0 1 (0*0.1) + (1*0.1) = 0.1 0
1 0 (1*0.1) + (0*0.1) = 0.1 0
1 1 (1*0.1) + (1*0.1) = 0.2 1

17
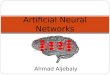
Decision Boundary
X1
X2
A
B
A
A
AA
AA
B
B
B
B
B
B
B DecisionBoundary

18
Strength
Solving complex problems Inputs are complex, large, unknown Transfer function is unknown
Adaptation Adaptive controllers Learning process

19
Shortfalls
Learning Weights
Processing time Delays in processing Sensing
Set up Layers

20
Application Example
• Engine Control Unit (ECU) in new cars• Fuel injector• The behaviour of a car engine is influenced
by a large number of parameters– temperature at various points– fuel/air mixture– lubricant viscosity.
• Major companies have used neural networks to dynamically tune an engine depending on current settings.

21
Neuro-Fuzzy
Hybrid controllers ANN controllers Fuzzy logic Controllers
Adaptation Rules
Membership functions

22
Neuro-Fuzzy

23
Conclusion
Ability of ANN to Adapt through learning Solve complex systems
ANN is claimed to be able to solve any problem with a maximum of two hidden layers

24
Thank You
Q&A

25 Back-up

26
Fuzzy System