Embed Size (px)
Citation preview

Article
A new gradient based step size controlledinverse eigen sensitivity algorithm foridentification of material and boundaryparameters of plates
Sk Abdul Goni, Subhajit Mondal and Sushanta Chakraborty
Abstract
The dynamic performance of any structure is function of existing material properties and boundary stiffness parameters
which may deteriorate or become more flexible due to prolonged use. These parameters are estimated inversely
through optimization of a suitable objective function. The gradient based optimization methods are preferred due to
their faster convergence from a set of initial guess points, but suffers mostly from lack of reliable methodology to select
appropriate step sizes. Arbitrary selection of step sizes may sometimes work well, depending upon the judgment of the
user, but is case specific. The present work describes the estimation of existing material properties and boundary
stiffness of isotropic and orthotropic plates from measured frequencies and mode shapes using a new gradient based
step size controlled inverse eigensensitivity algorithm. The method takes a strategy that the step sizes automatically
become smaller when the change in gradient of objective function is having a high value and similarly, takes larger steps
when the gradient is remaining fairly constants in subsequent iterations. The results obtained from the investigations are
encouraging, as some convergences could be achieved by this new adaptive step size control only, whereas methods
adopting arbitrary or no step size control diverged.
Keywords
Inverse eigensensitivity, parameter estimation, composite materials, finite element method, optimization
1. Introduction
Accurate assessment of dynamic behavior is necessaryto assure safety and serviceability during the entire life-span of any structure. Such behavior is functions ofgeometrical configuration, material properties, bound-ary condition and applied loading. After prolonged usein exposed environment, the material properties maydegrade sufficiently and there may be substantialincrease in boundary flexibility and must be incorpo-rated into the mathematical model for accurate predic-tion of dynamic behavior. In most practical situationsof existing structures, dynamic response parameters,such as the natural frequencies, mode shapes etc. areeasily and accurately measured through non destructivemodal testing. A mathematical inverse problem canthen be formulated to estimate the existing materialand boundary stiffness parameters. An objective func-tion can be defined from the differences between the
measured dynamic responses and those obtained froma mathematically precise numerical model, such asfrom a finite element analysis. Such mixed numerical-experimental techniques are usually solved iteratively asa model updating exercise using an optimizationapproach.
The most common optimization approaches usuallyemployed are the mathematical gradient based methodsor evolutionary algorithms such as genetic algorithm
Department of Civil Engineering, Indian Institute of Technology
Kharagpur, India
Corresponding author:
Sushanta Chakraborty, Department of Civil Engineering, Indian Institute
of Technology Kharagpur, India.
Email: [email protected]
Received: 8 July 2015; accepted: 20 October 2015
Journal of Vibration and Control
1–16
! The Author(s) 2015
Reprints and permissions:
sagepub.co.uk/journalsPermissions.nav
DOI: 10.1177/1077546315619076
jvc.sagepub.com
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from

etc. Iterative mathematical gradient based approachesare very fast, elegant and works well if step sizes ofupdating parameters can be selected appropriatelywithin narrow upper and lower bounds. On the otherhand, although robust, evolutionary algorithms tra-verse the entire solution space and thus may be compu-tationally prohibitive for problems having large degreesof freedom and/or involving large number of param-eters. Gradient based optimization approaches sufferfrom divergences and possibility of being arrested atlocal minima. Only starting from a new initial valueand with revised step sizes may lead to possible con-verged accurate solution in a fresh iteration. Examplesof popular gradient based methods are- Newton’smethod, Cauchy’s steepest decent method, Levenberg-Marquart algorithm, etc. Inverse EigensensitivityMethod (IEM) is one such gradient based algorithmwhere the differences between the experimental andnumerical eigenvalues and eigenvectors are used to esti-mate material and other structural parameters.
The approach of optimization in structural designcan be heuristic as well. Kazemzadeh et al. (2014)used a heuristic guided stochastic search algorithm forthe discrete sizing optimization of steel truss type ofstructures. The methodology has been further extendedto cater to steel space frame structures by Kazemzadehand Hasancebi (2015a). The limitation of the single dis-placement constraint under a single load case asdepicted above has been improved upon in a separatestudy on multiple displacement constraints and loadcases by Kazemzadeh and Hasancebi (2015b). Theheuristic guided stochastic search algorithm imple-mented suffers due to huge computational time ittakes for detailed structural analysis and this has beenoptimized through an upper bound strategy basedmetaheuristic algorithm by Kazemzadeh et al. (2013).Hasancebi and Kazemzadeh (2015) implemented anadaptive dimensional search metaheuristic algorithmby updating the search dimenstionality ratio to makethe algorithm much more efficient for sizing of trusses.Hasancebi and Kazemzadeh (2014) implemented arefined big bang- big crunch algorithm for design opti-mization and discrete sizing of steel truss structures andits performance is compared to the standard big bang-big crunch algorithm and with other metaheuristicalgorithms.
Relationship between elastic material properties anddynamic responses of structures were well known to theengineering community for a long time. Forster (1937)was possibly the first to attempt determination of theYoung’s Modulus of isotropic beams from measuredflexural fundamental modes, comparing the experimen-tal observations with results obtained implementingEuler-Bernoulli beam theory. Later, finite elementmethod became popular and still being extensively
used for modelling complicated structural behaviour.One widely explored problem in literature is thedetermination of all in-plane material parameterstogether, such as the Young’s moduli (E1, E2), shearmodulus (G12) and Poisson’s ratio (�12) of rectangularorthotropic plates made of fibre reinforced plastics(FRP) type of layered materials. Mostly, free boundaryconditions for modal testing were advocated to elimin-ate the boundary error (Deobald and Gibson, 1988),thereby restricting the application to extracted samplesand not to the real structures supported on ground.Dascotte (1992) estimated the in-plane elastic constantsof a number of vertically stiffened composite cylindricalshells using experimental modal tests and finite elementmodel updating using gradient based inverse eigensen-sitivity method. No specific control was exercised overthe step sizes in the iterative algorithm to achieveimproved convergences.
Chakraborty and Mukhopadhyay (2000) estimatedthe layerwise in-plane material properties of FRPplates using frequency and mode shapes, employingLevenberg- Marquardt algorithm. Cugnoni et al.(2007) used both frequencies and mode shape informa-tion to estimate in-plane as well as out-of-plane shearmoduli of thick composite plates using non-linear leastsquare optimization technique. De-Carvalho et al.(2011) used the Levenberg-Marquart algorithm in asso-ciation with a real search space based evolutionary algo-rithm to identify the non-linear elastic-plastic hardeningparameters. Yesilyurt and Gursoy (2013) determined theelastic constants, namely the longitudinal Young’smodulus, transverse Young’s modulus, and the shearmodulus, as well as the modal damping ratios of unidir-ectional composite beams using experimentally obtainedmodal parameter under free- free boundary conditions.Zhang et al. (2014) proposed a three dimensional graph-ical technique to identify interface, location and size ofdelamination in laminated composite beam using shift ofnatural frequencies. The technique being graphical isrelieved of any kind of iteration or network training.
There are limited attempts to accurately estimateexisting boundary stiffness parameters of structuresfrom measured dynamical responses solving an inverseproblem, whereas there are plenty of examples of for-ward problems to determine sets of appropriatelychosen admissible functions (Jin et al., 2010) to describethe boundary stiffness. Jin et al. (2014a) used a generalFourier solution for the vibration analysis of compositecylindrical, spherical shells and annular plates. The dis-placements and rotation components of the plates areexpressed as trigonometric series expansion to acceler-ate convergence. Ye et al. (2014) used a modifiedFourier solution for vibration analysis of platesimplementing first order shear deformation theoryand elements of revolution. Various cylindrical,
2 Journal of Vibration and Control
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from

conical, spherical shells and annular composite plateswith general elastic restraints are investigated. Jin et al.(2014b) studied three dimensional vibration responsesof isotropic and orthotropic conical shells having elasticboundary condition. The methodology has beenextended to rectangular plates with general boundaryconditions made of functionally graded materials (Jinet al., 2014c). Jin et al. (2013) investigated the freevibration responses of moderately thick compositelaminated cylindrical shells with arbitrary boundaryconditions using a unified approach and this has beenextended subsequently to cylindrical, conical, sphericalshells and annular composite plates by Su et al. (2014).
Estimation of boundary parameters from measureddynamic responses using inverse approaches are alsoavailable. Friswell and Mottershead (1995) determinedboundary translational and rotational stiffness and flex-ural rigidity of an aluminum cantilever beam from fre-quency information using finite element modelupdating. Ahmadian et al. (2001) developed a newmethodology based on the solution of the characteristicequations to update the boundary parameters of iso-tropic plates using experimental modal data. Lee andKam (2006) described a non-destructive evaluationtechnique based on experimental natural frequenciesof composite plates to estimate the boundary flexibilityand material and theoretical constant together. Asikand Dural (2007) studied the effects of boundary con-ditions on the natural frequencies of laminated compos-ite beam consisting of two or more thin glass platesbonded by polyvinyl butyral. Simply supported andcantilever boundary conditions were studied. Mishraand Chakraborty (2015) recently estimated boundaryflexibility along with the in plane material propertiesof an orthotropic FRP plate employing Inverse IEMusing a pre-defined constant step size of parameters inoptimization. Arora (2011) compared two finite elem-ent model updating techniques- one direct approachusing the modal data and the other is an iterative par-ameter based method employing frequency responsedata. A numerically simulated example involving afixed beam and a detailed actual experiment usinga cantilever frame are presented to compare the resultsobtained from the two approaches. The iterativemethod is found to reproduce the measured frequencyresponse functions better as compared to the directapproach.
Most of the approaches of optimization for estima-tion of material and boundary stiffness parametersadopted arbitrarily selected constant step sizes. IEM,which is a popular gradient based optimization algo-rithm, was first developed by Collins et al. (1974) forthe purpose of finite element model updating. Chen andGarba (1980) modified Collin’s statistical approach to amore acceptable coefficient based methodology. Later,
Jung (1992) proposed an improved IEM approachwhere the step sizes were arbitrarily reduced within pre-defined upper and lower bounds of variable parametersto have improved convergences from some initialpoints. However, the problem of divergence from stilla large number of initial values was not addressed. Theoscillatory behaviour of the algorithm with a step sizechosen larger than necessary also could not be resolved.The methodology may be categorized as a ‘constantstep size approach’ but the selection of the absolutevalue of the step were not having any firm basis andmostly required trial and error procedure to settle withan appropriate value of step size. The procedure is timeconsuming as well as problem dependent. Moreover,different bounds for all different parameters make thetrial and error procedure itself very tedious. Erikssonand Kouhia (1995) proposed an adaptive step size con-trolled optimization algorithm for solving non-linearstructural equilibrium problems. The step sizes werereduced in highly curved portion of an equilibriumpath. The performance of the proposed algorithm isdemonstrated through an example of a cantileverbeam and a two spanned continuous beam, includingboth geometrical and material non-linearity. Yu et al.(2007) proposed a nonlinear conjugate gradient basedstep size control methodology to solve large-scaleunconstrained optimization problems. The method fol-lows a steepest descent direction whenever a smallerstep size is adopted during the iterations away fromthe solution points. Most recently Kazemzadeh andHasancebi (2014) used a self adaptive step size searchalgorithm for truss type structures where an additionalrandomness is incorporated into the step sizes to pre-serve the exploration capacity of the algorithm duringthe optimization procedure.
It appears from the current literature that investiga-tors rely upon various techniques, such as computationof Hessian or their inverses, adding adaptive quadraticterm to the objective function, efficient computation ofJacobian numerically to reduce computation time, orcontrol step size arbitrarily or in an adaptive manner toachieve improved convergences. Some algorithms areefficient if the objective function is convex in nature,otherwise more complicated algorithm such as non-convex spectral method needs to be employed.Amongst all techniques, the adjustment of step sizesadaptively remains the most popular due to the easeof interpretation within the iterative procedures. Thestep sizes should be controlled adaptively for highlynonlinear path in optimization to avoid divergence.But the current literature does not provide enoughguidance about the definite selection procedure of thestep sizes during iterative process of optimization forparameter estimate. The current literature is scanty asrelated to the step size controlling methodology based
Goni et al. 3
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from

on the rate of change of gradient of objective functionin multiple parameter estimation. Main idea behind thismethod is to adopt reduced step sizes in highly curvedpath of convergence and again accelerate once the vari-able is pointing towards the solution based on com-puted gradients. It is imperative that the procedurecannot get rid of evaluation of objective function alto-gether but can significantly reduce the number of suchcomputations, thereby improve upon the efficiency ofthe algorithm.
The present approach tries to propose a newtechnique of controlling the step sizes of parameterswithin the existing framework of IEM in the iterativeoptimization process based on computed gradients ofthe objective function to estimate the material andboundary stiffness parameters of layered FRP compositeplates. The method takes a strategy that the step sizesautomatically become smaller when the gradient of theobjective function changes rapidly, thus providing anopportunity to the algorithm to check the impendingdivergence. Similarly, the algorithm relaxes to takelarger steps when the gradient is remaining fairlyunchanged within subsequent iterations, thereby acceler-ating the convergence. The objective of the present inves-tigation is to carefully examine whether such gradientbased adaptive step size control has any distinct advan-tage into the determination of material and boundarystiffness parameters of isotropic and orthotropic platetype of structures. The results are compared with meth-odologies implementing uncontrolled or arbitrarily con-trolled constant step sizes to judge its efficiency.
2. Mathematical formulation and
numerical implementation
The relationship between a function f and variable pcan be written using Taylor series expansion assumingfirst order sensitivity (Jung, 1992)
f pð Þ ffi f p0ð Þ þXni¼1
@f
@pi
� �pi�p0
p� p0ð Þ ð1Þ
Considering a fibre reinforced plastic (FRP) plate, pindicate the elastic or boundary stiffness parameters (tobe identified) and p0 are the initial values of these par-ameters, f(p) are the experimentally determined eigen-
values and eigenvectors, @f@pi
h ipi¼p0
is the sensitivity
matrix whose elements are the partial derivatives ofthe eigenvalues and eigenvectors with respect to theparameters. The sensitivities are usually computedfrom the numerical model of the FRP plate, althoughLin et al. (1993) proposed that experimental modal data(frequencies and mode shapes) should also be employedin the computation of sensitivity matrices along with
the analytical modal frequencies and mode shapes toincorporate practical variations of parameters.
The above equation can be abbreviated as
�f� �
¼@f pið Þ
@pi
� ��p� �
ð2Þ
where, �f� �
¼ ff pð Þg � ff p0ð Þg, �p� �
¼ fpg � fp0gGenerally an objective function (F) can be defined
using L2 norm of the differences in responses which invector form can be expressed as
F ¼ �f� �T
�f� �
ð3Þ
To minimise the above mentioned objective function@F@ pf g
needs to be set to zero, which leads to
@F
@ p� � ¼ 2 S½ �Tf�gi ¼ 0 ð4Þ
Meaning thereby f�gi ¼ 0. This eventually reducesthe sensitivity equation to �f
� �¼ S½ � �p
� �. It is to be
remembered that the sensitivity matrix [S] is usually nota square matrix, hence the changes required into theparameters during iteration can be obtained usingpseudo-inverse
�p� �
¼ S½ �þ �f� �
ð5Þ
where, the pseudo-inverse S½ �þ¼ S½ �T S½ �� �1
S½ �T
Hence, the updated parameter can be expressed as
p� �
iþ1¼ p� �
iþ �p� �
ið6Þ
The procedure is repeated and the parameters areincrementally updated in the non-linear optimizationprocess until the square of the error between theanalytical and experimental modes falls within a pre-determined margin of error ". i.e. �f gT �f g � ".
The above methodology is the classical inverse eigen-sensitivity method (IEM) for which serious limitationswere observed (Jung, 1992) when applied to problemswith initial guesses sufficiently away from the solutionor when the objective function is defined from realexperimental noisy data. For the estimation of materialand boundary stiffness parameters, the classical IEMdoes guarantee convergence only when there is smallerror between the numerical model and the experimen-tal model and appropriate exhaustive set of parameterscould be identified for solution of this inverse problem.
For a highly nonlinear multivariable optimisationproblem, classical IEM adopts a larger step size basedon computed sensitivities, if the modal properties com-puted using the initial values of the material parameters
4 Journal of Vibration and Control
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from
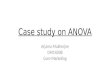
or boundary stiffness parameters are far away from theobserved modal parameters. Unfortunately, due tothe larger step sizes of a parameter, it may overshootthe optimum point and this is compensated by adjust-ments into the other parameters. In this way the com-putation of sensitivities and calculation of next stepsizes become interdependent and more complicated.The optimization may lead to divergence from thenext updated set of parameters if such uncontrolledstep size based optimization is adopted. The unfortu-nate case of divergence is explained in Figure 1 wherethe updated parameter reached to P1 from P0, insteadof P_Optimum due to comparatively larger (predefined)selection of step sizes.
To mitigate the above problem of classical IEM, thecurrent practice is to reduce the step size arbitrarily,according to the judgment of the user (mostly obtainedfrom trial runs of the program). Such type of arbitrarystep size control often works well, especially if the guessfor the iterative path of convergence is well perceivedby the user a-priori (from experience of solving similarproblems). However, there is no logical basis to estab-lish any standard guidelines for the selection of suchstep sizes in general.
Two important factors need to be considered whileselecting proper step sizes in iterative optimizationprocedures: (1) Gradient at the initial point and (2)Distance of the current point (eigenvalues or eigenvec-tors) from the actual solution or the target point(‘experimental’ eigenvalues and eigenvectors). In theproposed methodology a decision to increase ordecrease the step sizes adaptively is taken dependingupon the changes in gradient from one point to itssuccessive point for at least two subsequent steps. Anadaptive step size (�p) is then selected on the basis ofthe following observations:
1. Rapid but monotonic change of gradient gives anindication that smaller step sizes need to be taken
so that it can prevent the oscillation of parametervalues during iteration towards convergence.
2. Slow but monotonic change of gradient says that it isdirected towards the optimum points correctly and alarger step size (conveniently chosen from gradientcomputations) can be assumed to reach towards theoptimum point.
3. Rapid but non-monotonic change indicates that theoptimum point is situated in between pi and piþ1during iteration at ith step and the subsequentstep. Hence once again, a smaller step size isadvocated.
A projection method is proposed to find the normal-ized change of gradient from the initial value of param-eter pi and subsequent value of parameter piþ1. Thenecessary computational steps can be summarized asfollows:
Step 1: Calculate sensitivity matrix [S] and gradient of
the objective function @F@ pf g
at point piStep 2: Calculate change in parameters �p
Step 3: Compute updated parameter values p� �
iþ1¼
p� �
iþ �p� �
i
Step 4: Repeat the step-1 at point piþ1 to compute the
gradient of objective function again
Ch Grad Pi ¼abs @F
@fpgp¼piþ1� @F
@fpgp¼pi
�
abs @F@fpgp¼pi
� ð7Þ
Step 5: Calculate normalized change of gradient of each
parameter using equation (7)
Step 6: Depending upon the change of gradient of
objective function with respect to individual
parameters, step sizes (�p) are controlled
based on the concept as stated above
Step 7:Now p� �
iis updated according to p
� �iþ1¼ p� �
iþ
�p� �
Controlled
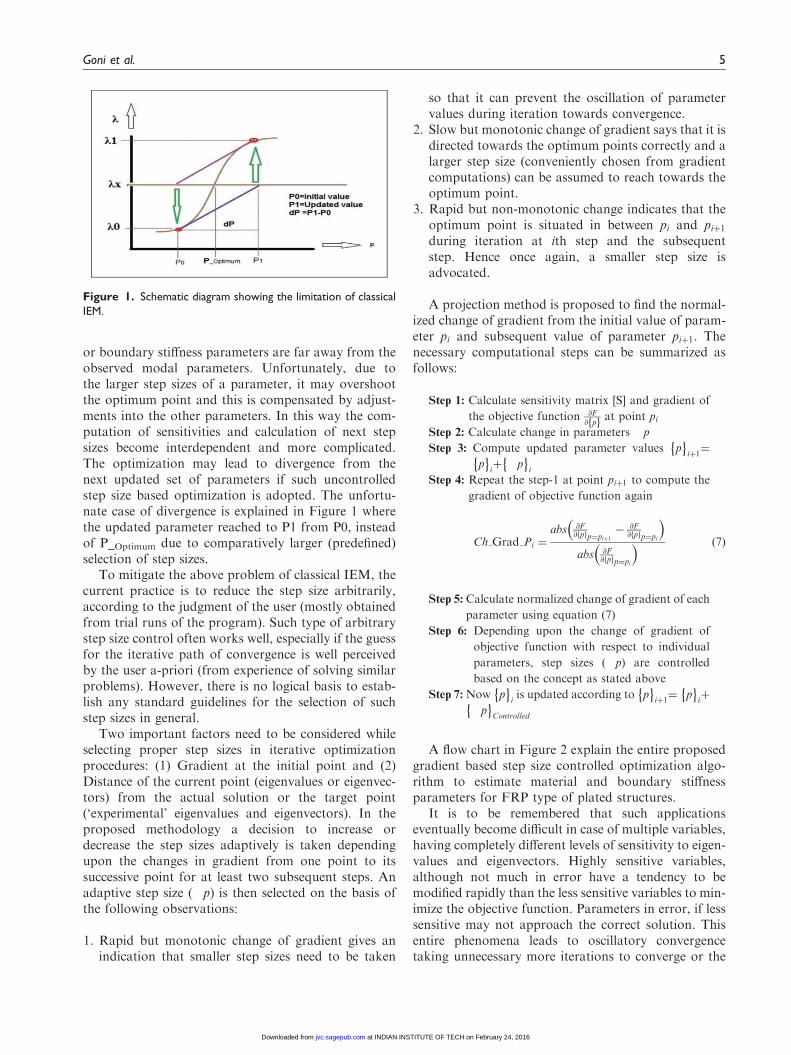
A flow chart in Figure 2 explain the entire proposedgradient based step size controlled optimization algo-rithm to estimate material and boundary stiffnessparameters for FRP type of plated structures.
It is to be remembered that such applicationseventually become difficult in case of multiple variables,having completely different levels of sensitivity to eigen-values and eigenvectors. Highly sensitive variables,although not much in error have a tendency to bemodified rapidly than the less sensitive variables to min-imize the objective function. Parameters in error, if lesssensitive may not approach the correct solution. Thisentire phenomena leads to oscillatory convergencetaking unnecessary more iterations to converge or the
Figure 1. Schematic diagram showing the limitation of classical
IEM.
Goni et al. 5
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from
algorithm may diverge also. To reduce such possibili-ties, researchers have used arbitrary constant boundson parameters, depending upon specific applications.To examine whether the present methodology has anydistinct advantage, same sets of problems are alsosolved using the classical IEM implementing no stepsize control or with constant step size control and theresults are compared.
3. Numerically simulated examples
Three different problems with increasing level of diffi-culties have been selected to demonstrate the efficacy ofthe present methodology. First an isotropic cantileverplate has been considered and its material properties,viz. the Young’s modulus and Poisson’s ratio areupdated. Next, an orthotropic carbon epoxy cantileverplate is taken to update all the in-plane elastic param-eters. Finally, the orthotropic plate with changes inmaterial properties and boundary fixity together isinvestigated to observe the behavior of the proposedoptimization algorithm. IEM is used in various modes(gradient based step size control (GBCSS), constant
step size control (CSS) and uncontrolled step size(UCSS) to estimate the parameters and the results arecompared.
3.1. Problem 1: Estimation of material propertiesof an isotropic cantilever plate
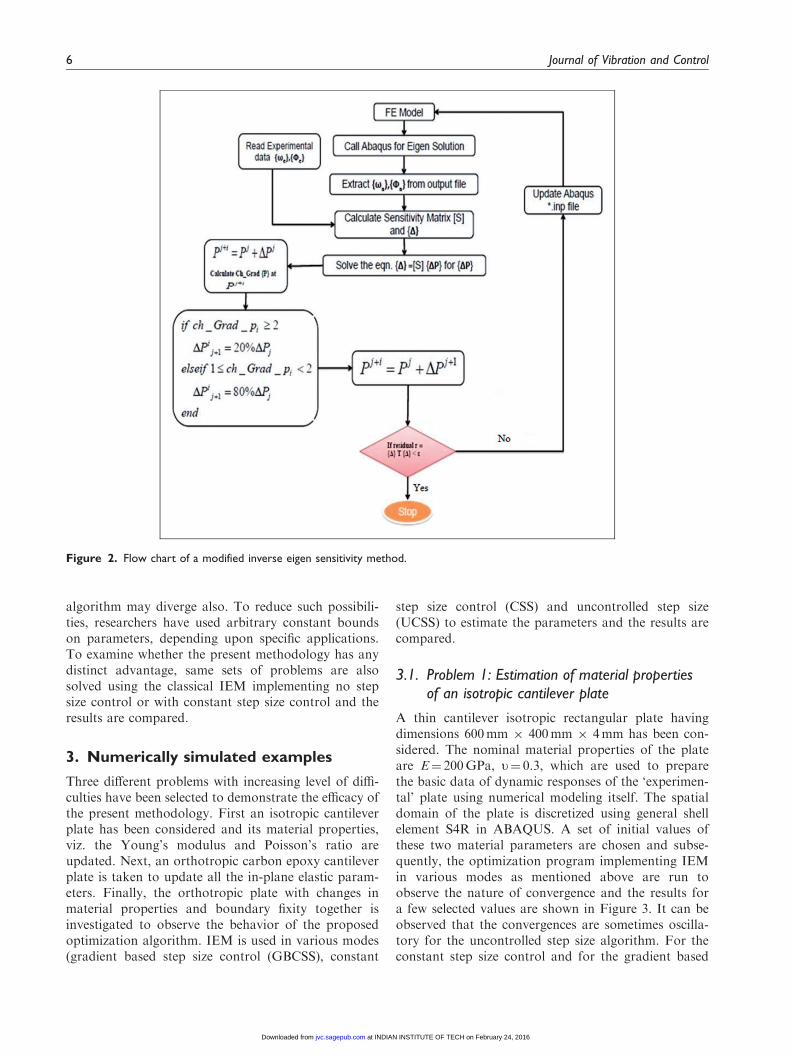
A thin cantilever isotropic rectangular plate havingdimensions 600mm � 400mm � 4mm has been con-sidered. The nominal material properties of the plateare E¼ 200GPa, u¼ 0.3, which are used to preparethe basic data of dynamic responses of the ‘experimen-tal’ plate using numerical modeling itself. The spatialdomain of the plate is discretized using general shellelement S4R in ABAQUS. A set of initial values ofthese two material parameters are chosen and subse-quently, the optimization program implementing IEMin various modes as mentioned above are run toobserve the nature of convergence and the results fora few selected values are shown in Figure 3. It can beobserved that the convergences are sometimes oscilla-tory for the uncontrolled step size algorithm. For theconstant step size control and for the gradient based
Figure 2. Flow chart of a modified inverse eigen sensitivity method.
6 Journal of Vibration and Control
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from
step size control algorithms, the convergences are bothfound to be monotonic and smooth. However, the gra-dient based step size control algorithm takes lessnumber of iterations.
Since isotropic material was used, only two inde-pendent material parameters (E, u) were the uncertainparameters. The benefit of using the gradient based stepsize control is very apparent as the number of iterationsis considerably less for this case. Similar type of con-vergence also has been achieved for Poisson’s ratio butnot presented for brevity.
3.2. Problem 2: Estimation of in-plane materialconstants of an orthotropic carbon-epoxycantilever plate
An orthotropic cantilever plate made of carbon epoxycomposite is considered in this problem. The dimen-sions of the plate are chosen to be the same as before,i.e. 600mm � 400mm � 4mm. The same general shell
element S4R in ABAQUS has been used to discretizethe plate similar to the previous problem. The four inplane equivalent orthotropic material properties (E1,E2, G12, �12) of the orthotropic plate have beenchosen as the parameters to be updated in this problem.The nominal material properties of the plate have beentaken as E1¼ 128GPa, E2¼ 10GPa, G12¼ 7GPa,u12¼ 0.22 and these values have been used to preparethe basic data of the dynamic responses, such as thefrequencies and mode shapes of the ‘experimental’plate. It is to be mentioned that in practical problems,these material constants are determined through quasi-static destructive characterization tests.
Twenty sets of initial values of these four parametersare randomly chosen within the wide range of upperand lower bounds. The IEM is used in various modes(gradient based step size control (GBCSS), constantstep size control (CSS) and uncontrolled step size(UCSS)) to estimate the four in-plane stiffness param-eters using those randomly chosen initial values as
Figure 3. Convergence of Young’s modulus (E) from different initial guess points using (a) UCSS, (b) CSS and (c) GBCSS for the
isotropic plate.
Goni et al. 7
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from
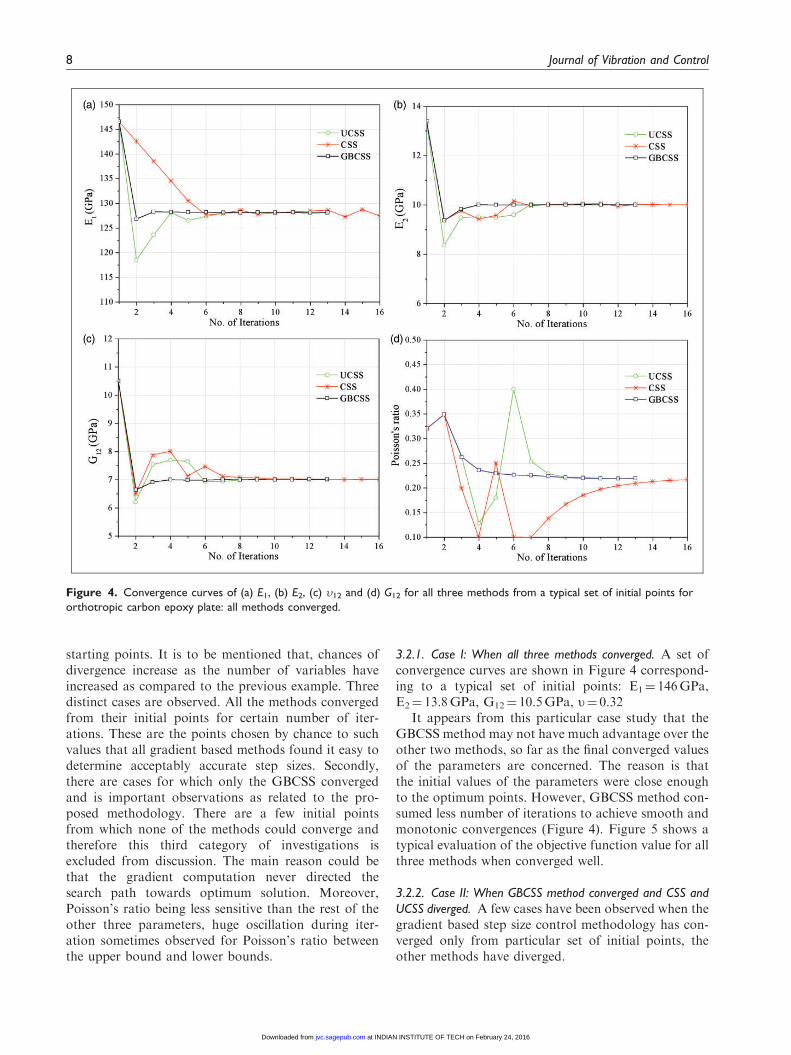
starting points. It is to be mentioned that, chances ofdivergence increase as the number of variables haveincreased as compared to the previous example. Threedistinct cases are observed. All the methods convergedfrom their initial points for certain number of iter-ations. These are the points chosen by chance to suchvalues that all gradient based methods found it easy todetermine acceptably accurate step sizes. Secondly,there are cases for which only the GBCSS convergedand is important observations as related to the pro-posed methodology. There are a few initial pointsfrom which none of the methods could converge andtherefore this third category of investigations isexcluded from discussion. The main reason could bethat the gradient computation never directed thesearch path towards optimum solution. Moreover,Poisson’s ratio being less sensitive than the rest of theother three parameters, huge oscillation during iter-ation sometimes observed for Poisson’s ratio betweenthe upper bound and lower bounds.
3.2.1. Case I: When all three methods converged. A set ofconvergence curves are shown in Figure 4 correspond-ing to a typical set of initial points: E1¼ 146GPa,E2¼ 13.8GPa, G12¼ 10.5GPa, u¼ 0.32
It appears from this particular case study that theGBCSS method may not have much advantage over theother two methods, so far as the final converged valuesof the parameters are concerned. The reason is thatthe initial values of the parameters were close enoughto the optimum points. However, GBCSS method con-sumed less number of iterations to achieve smooth andmonotonic convergences (Figure 4). Figure 5 shows atypical evaluation of the objective function value for allthree methods when converged well.
3.2.2. Case II: When GBCSS method converged and CSS and
UCSS diverged. A few cases have been observed when thegradient based step size control methodology has con-verged only from particular set of initial points, theother methods have diverged.
Figure 4. Convergence curves of (a) E1, (b) E2, (c) �12 and (d) G12 for all three methods from a typical set of initial points for
orthotropic carbon epoxy plate: all methods converged.
8 Journal of Vibration and Control
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from
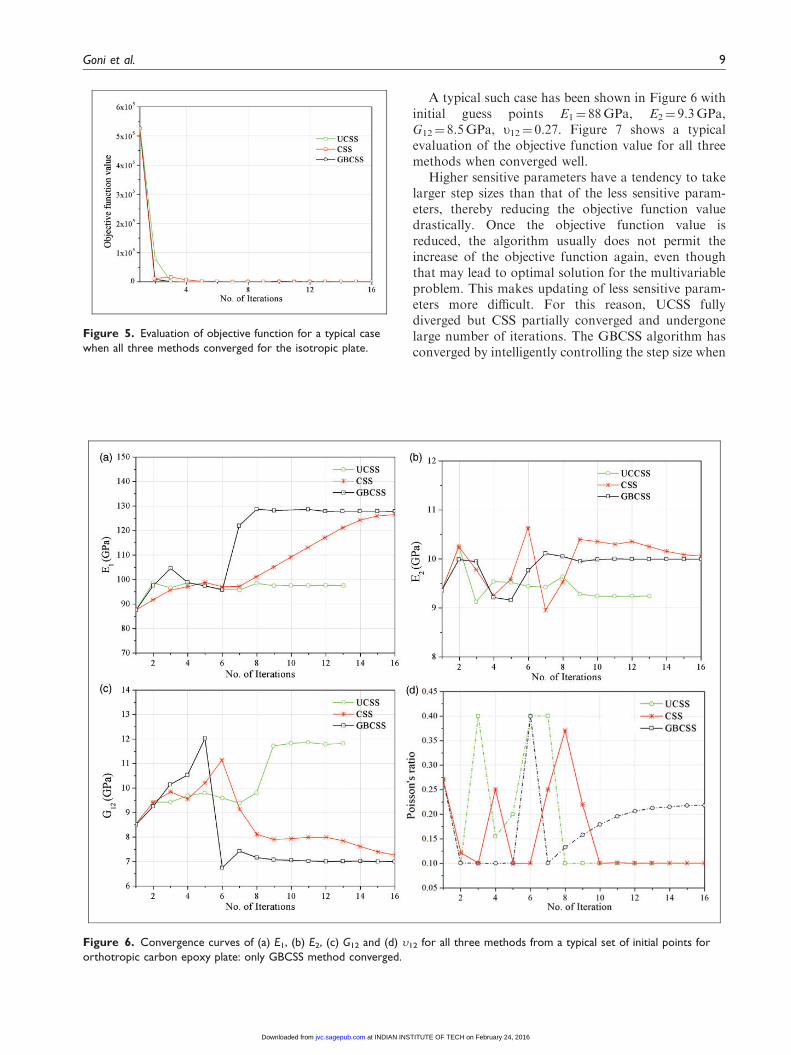
A typical such case has been shown in Figure 6 withinitial guess points E1¼ 88GPa, E2¼ 9.3GPa,G12¼ 8.5GPa, u12¼ 0.27. Figure 7 shows a typicalevaluation of the objective function value for all threemethods when converged well.
Higher sensitive parameters have a tendency to takelarger step sizes than that of the less sensitive param-eters, thereby reducing the objective function valuedrastically. Once the objective function value isreduced, the algorithm usually does not permit theincrease of the objective function again, even thoughthat may lead to optimal solution for the multivariableproblem. This makes updating of less sensitive param-eters more difficult. For this reason, UCSS fullydiverged but CSS partially converged and undergonelarge number of iterations. The GBCSS algorithm hasconverged by intelligently controlling the step size when
Figure 5. Evaluation of objective function for a typical case
when all three methods converged for the isotropic plate.
Figure 6. Convergence curves of (a) E1, (b) E2, (c) G12 and (d) �12 for all three methods from a typical set of initial points for
orthotropic carbon epoxy plate: only GBCSS method converged.
Goni et al. 9
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from
the objective function tempted to decreaseconsiderably. Hence, somewhat lesser step sizes forthe parameters during iterations were allowed to facili-tate other less sensitive parameters to update in subse-quent steps, before the objective function is furtherminimized.
3.3. Problem 3: Estimation of in-plane materialconstants and boundary stiffness of anorthotropic carbon-epoxy elasticallysupported plate
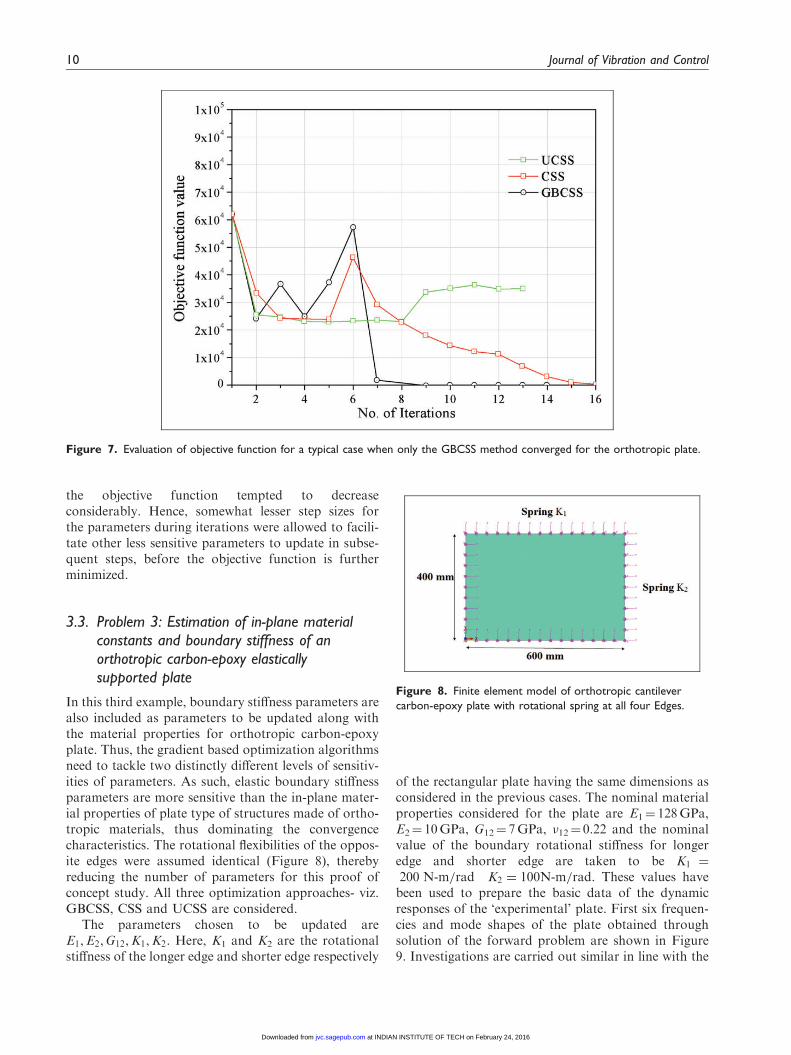
In this third example, boundary stiffness parameters arealso included as parameters to be updated along withthe material properties for orthotropic carbon-epoxyplate. Thus, the gradient based optimization algorithmsneed to tackle two distinctly different levels of sensitiv-ities of parameters. As such, elastic boundary stiffnessparameters are more sensitive than the in-plane mater-ial properties of plate type of structures made of ortho-tropic materials, thus dominating the convergencecharacteristics. The rotational flexibilities of the oppos-ite edges were assumed identical (Figure 8), therebyreducing the number of parameters for this proof ofconcept study. All three optimization approaches- viz.GBCSS, CSS and UCSS are considered.
The parameters chosen to be updated areE1,E2,G12,K1,K2. Here, K1 and K2 are the rotationalstiffness of the longer edge and shorter edge respectively
of the rectangular plate having the same dimensions asconsidered in the previous cases. The nominal materialproperties considered for the plate are E1¼ 128GPa,E2¼ 10GPa, G12¼ 7GPa, �12¼ 0.22 and the nominalvalue of the boundary rotational stiffness for longeredge and shorter edge are taken to be K1 ¼
200 N-m=rad K2 ¼ 100N-m=rad. These values havebeen used to prepare the basic data of the dynamicresponses of the ‘experimental’ plate. First six frequen-cies and mode shapes of the plate obtained throughsolution of the forward problem are shown in Figure9. Investigations are carried out similar in line with the
Figure 7. Evaluation of objective function for a typical case when only the GBCSS method converged for the orthotropic plate.
Figure 8. Finite element model of orthotropic cantilever
carbon-epoxy plate with rotational spring at all four Edges.
10 Journal of Vibration and Control
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from
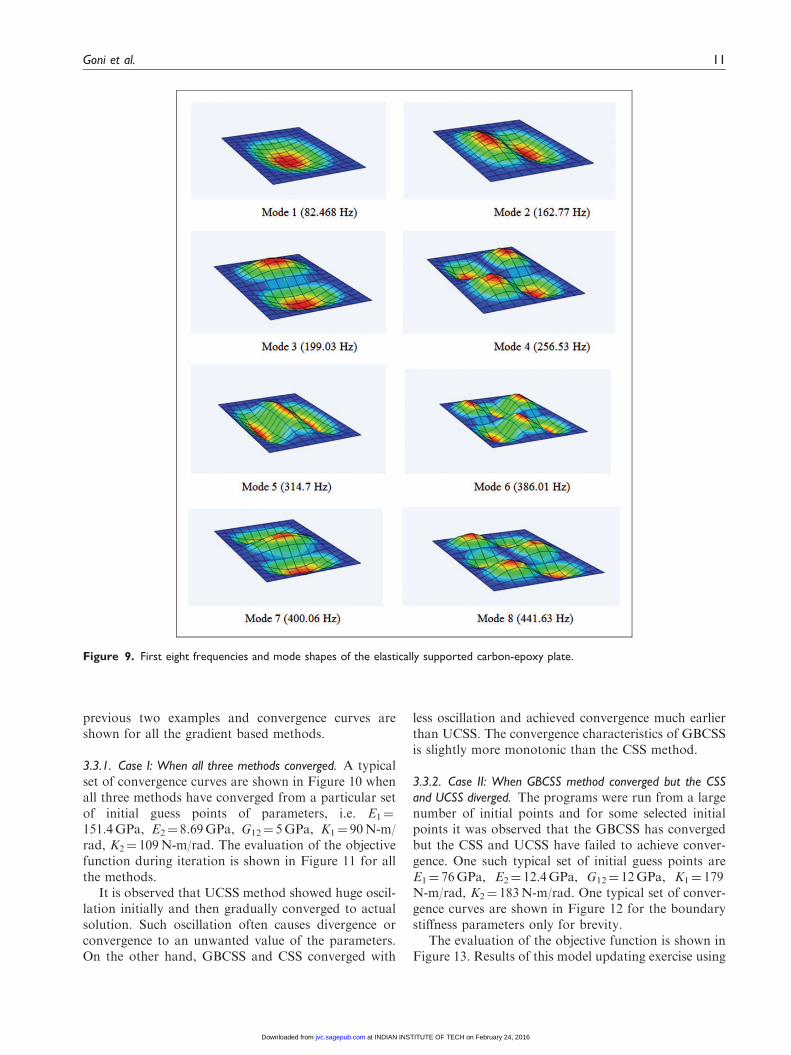
previous two examples and convergence curves areshown for all the gradient based methods.
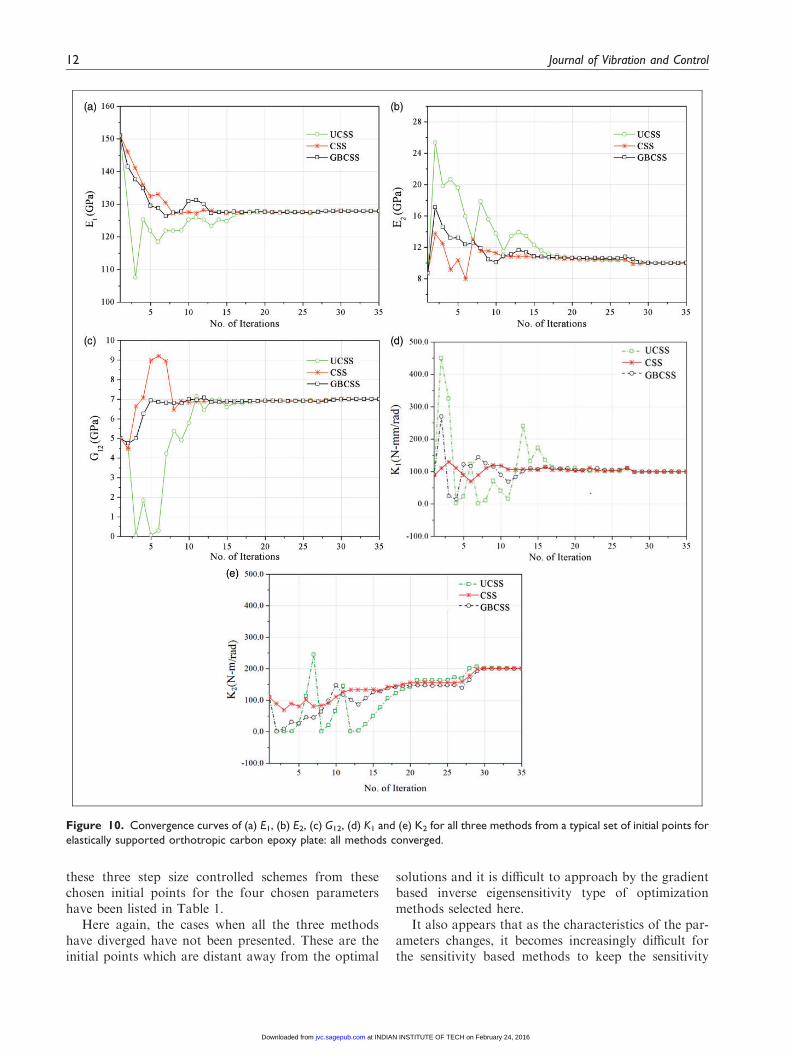
3.3.1. Case I: When all three methods converged. A typicalset of convergence curves are shown in Figure 10 whenall three methods have converged from a particular setof initial guess points of parameters, i.e. E1¼
151.4GPa, E2¼ 8.69GPa, G12¼ 5GPa, K1¼ 90N-m/rad, K2¼ 109N-m/rad. The evaluation of the objectivefunction during iteration is shown in Figure 11 for allthe methods.
It is observed that UCSS method showed huge oscil-lation initially and then gradually converged to actualsolution. Such oscillation often causes divergence orconvergence to an unwanted value of the parameters.On the other hand, GBCSS and CSS converged with
less oscillation and achieved convergence much earlierthan UCSS. The convergence characteristics of GBCSSis slightly more monotonic than the CSS method.
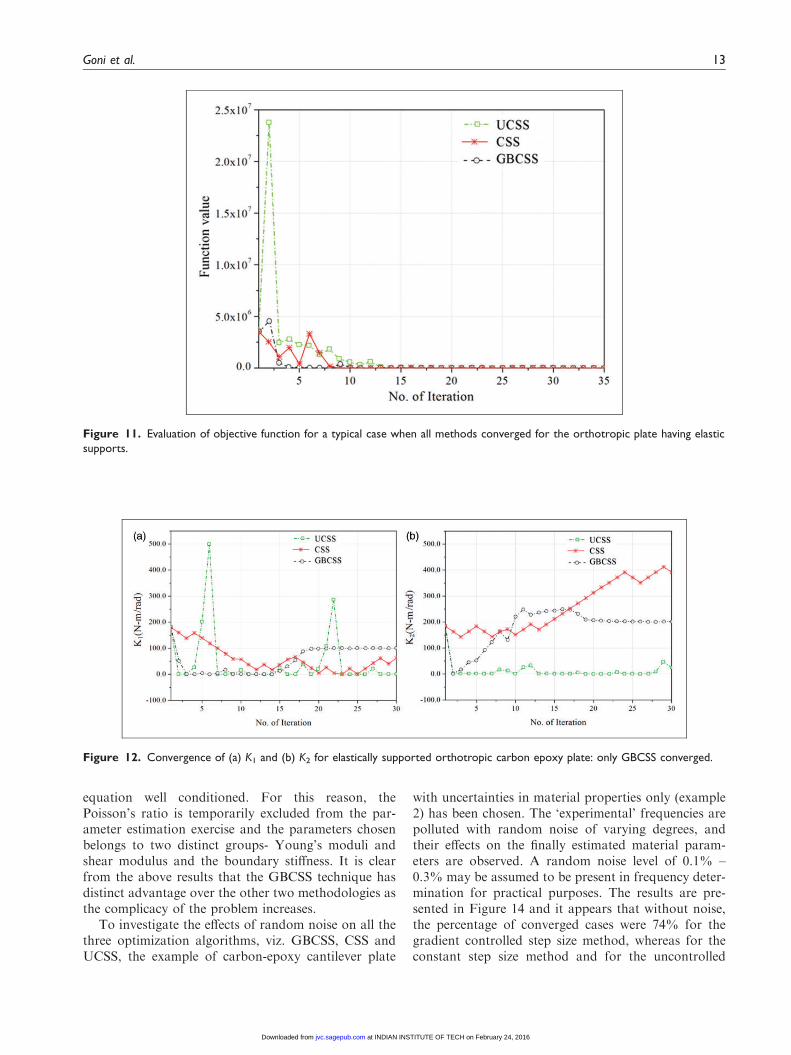
3.3.2. Case II: When GBCSS method converged but the CSS
and UCSS diverged. The programs were run from a largenumber of initial points and for some selected initialpoints it was observed that the GBCSS has convergedbut the CSS and UCSS have failed to achieve conver-gence. One such typical set of initial guess points areE1¼ 76GPa, E2¼ 12.4GPa, G12¼ 12GPa, K1¼ 179N-m/rad, K2¼ 183N-m/rad. One typical set of conver-gence curves are shown in Figure 12 for the boundarystiffness parameters only for brevity.
The evaluation of the objective function is shown inFigure 13. Results of this model updating exercise using
Figure 9. First eight frequencies and mode shapes of the elastically supported carbon-epoxy plate.
Goni et al. 11
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from
these three step size controlled schemes from thesechosen initial points for the four chosen parametershave been listed in Table 1.
Here again, the cases when all the three methodshave diverged have not been presented. These are theinitial points which are distant away from the optimal
solutions and it is difficult to approach by the gradientbased inverse eigensensitivity type of optimizationmethods selected here.
It also appears that as the characteristics of the par-ameters changes, it becomes increasingly difficult forthe sensitivity based methods to keep the sensitivity
Figure 10. Convergence curves of (a) E1, (b) E2, (c) G12, (d) K1 and (e) K2 for all three methods from a typical set of initial points for
elastically supported orthotropic carbon epoxy plate: all methods converged.
12 Journal of Vibration and Control
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from
equation well conditioned. For this reason, thePoisson’s ratio is temporarily excluded from the par-ameter estimation exercise and the parameters chosenbelongs to two distinct groups- Young’s moduli andshear modulus and the boundary stiffness. It is clearfrom the above results that the GBCSS technique hasdistinct advantage over the other two methodologies asthe complicacy of the problem increases.
To investigate the effects of random noise on all thethree optimization algorithms, viz. GBCSS, CSS andUCSS, the example of carbon-epoxy cantilever plate
with uncertainties in material properties only (example2) has been chosen. The ‘experimental’ frequencies arepolluted with random noise of varying degrees, andtheir effects on the finally estimated material param-eters are observed. A random noise level of 0.1% –0.3% may be assumed to be present in frequency deter-mination for practical purposes. The results are pre-sented in Figure 14 and it appears that without noise,the percentage of converged cases were 74% for thegradient controlled step size method, whereas for theconstant step size method and for the uncontrolled
Figure 11. Evaluation of objective function for a typical case when all methods converged for the orthotropic plate having elastic
supports.
Figure 12. Convergence of (a) K1 and (b) K2 for elastically supported orthotropic carbon epoxy plate: only GBCSS converged.
Goni et al. 13
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from
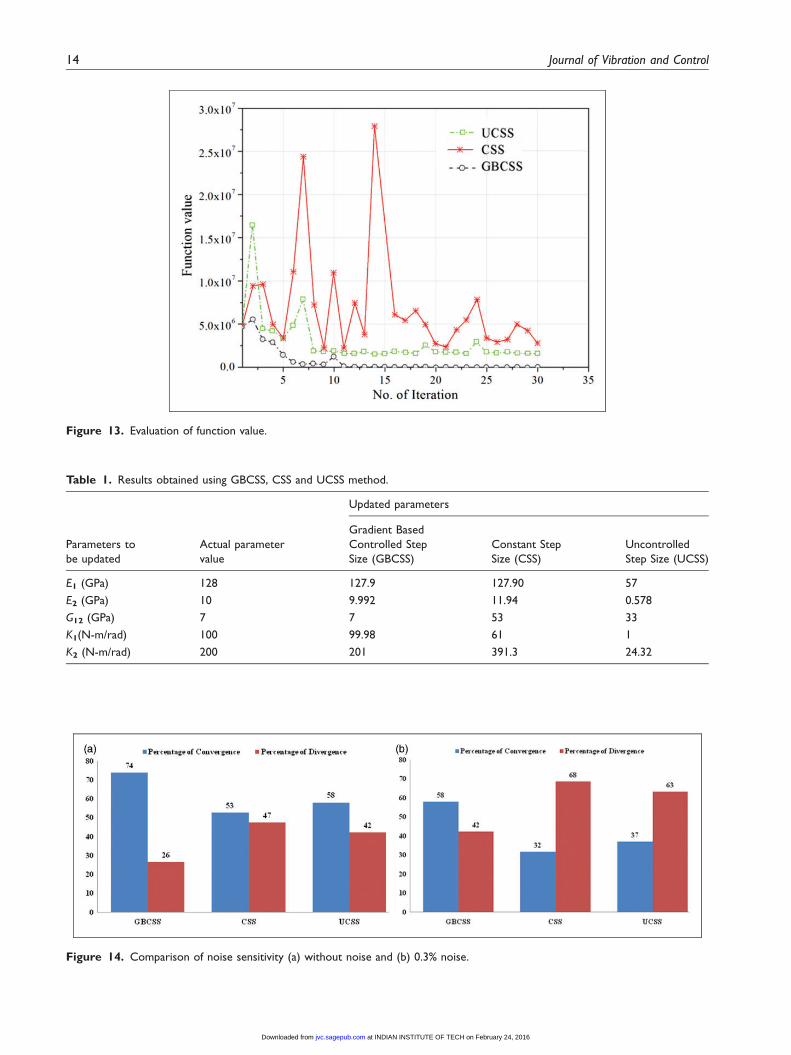
Figure 13. Evaluation of function value.
Table 1. Results obtained using GBCSS, CSS and UCSS method.
Parameters to
be updated
Actual parameter
value
Updated parameters
Gradient Based
Controlled Step
Size (GBCSS)
Constant Step
Size (CSS)
Uncontrolled
Step Size (UCSS)
E1 (GPa) 128 127.9 127.90 57
E2 (GPa) 10 9.992 11.94 0.578
G12 (GPa) 7 7 53 33
K1(N-m/rad) 100 99.98 61 1
K2 (N-m/rad) 200 201 391.3 24.32
Figure 14. Comparison of noise sensitivity (a) without noise and (b) 0.3% noise.
14 Journal of Vibration and Control
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from

algorithm, the percentages were 53% and 58%respectively. It may be noted that for the 20 initialvalues selected for case studies, the uncontrolled algo-rithm performed marginally better than the constantstep size approach but they altogether performed lessbetter than the gradient based controlled step sizeapproach. For increased noise level, it is immediatelyapparent that the number of divergence cases hasexceeded the number of cases of convergences forthe two approaches, viz. UCSS and CSS, whereas,the GBCSS method (Gradient based step size) per-formed very robustly with more number of conver-gences than failures. It clearly establishes thesuperiority of this gradient based step sized controlalgorithm over the other two popular and conven-tional methods.
4. Conclusions
A gradient based step size controlled optimization algo-rithm has been implemented to inversely estimate thematerial parameters and the boundary stiffness param-eters of isotropic and orthotropic plates from measuredfrequencies and mode shapes. The algorithm is foundto be superior to any arbitrarily step size controlled orwithout step size controlled algorithm within the frame-work of inverse eigensensitivity methodology, from aconsiderable number of initial guesses of the param-eters. The proposed method is also found to be lessnoise prone. It is to be mentioned that the presentmethodology also diverges in limited cases, dependingupon the choice of initial values which are very faraway from the actual solutions, but this rate of failureis much less as compared to other selected gradientbased methods. The algorithm largely relieves the userfrom the appropriate selection of step size by someautomatic control, still the user needs to guess thestep size initially and the performance, mainly the con-vergence characteristics is affected by such selection.However the much needed control over divergence isachieved by and large. The technique is demonstratedby determining material parameters of an isotropic can-tilever plate and an orthotropic carbon epoxy plate andmaterial as well as boundary rotational stiffness param-eters of an elastically supported orthotropic carbonepoxy plate.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest withrespect to the research, authorship, and/or publication of thisarticle.
Funding
The author(s) received no financial support for the research,authorship, and/or publication of this article.
References
Ahmadian H, Mottershead JE and Friswell MI (2001)
Boundary condition identification by solving characteris-
tic equations. Journal of Sound and vibration 247: 755–763.Arora V (2011) Comparative study of finite element model
updating methods. Journal of Vibration and Control 17:
2023–2039.Asik MZ and Dural E (2007) Effect of support conditions on
the vibration of laminated composite beams. Journal of
Vibration and Control 13: 1361–1368.Chakraborty S and Mukhopadhyay M (2000) Estimation of
layerwise in-plane elastic parameters of stiffened compos-
ite plates using model updating techniques. AIAA Journal
38: 1716–1724.Chen JC and Garba JA (1980) Analytical model improvement
using modal test results. AIAA Journal 18: 684–690.
Collins JD, Hart GC, Hasselman TK and Kennedy B (1974)
Statistical identification of structure. AIAA Journal 12:
185–190.
Cugnoni J, Gmur T and Schorderet A (2007) Inverse method
based on modal analysis for characterizing the constitutive
properties of thick composite plates. Computers and
Structures 85: 1310–1320.Dascotte E (1992) Material identification of composite struc-
tures from combined use of finite element analysis and
experimental modal analysis 10th IMAC: 1274–1280.De-Carvalho R, Valente RAF and Andrade-Campos A
(2011) Optimization strategies for non-linear material par-
ameters identification in metal forming problems.
Computers and Structures 89: 246–255.Deobald LR and Gibson RF (1988) Determination of elastic
constants of orthotropic plates by a modal analysis/
Rayleigh-Ritz technique. Journal of Sound and Vibration
124: 269–283.Eriksson A and Kouhia R (1995) On step size adjustments in
structural continuation problems. Computers & Structures
55: 495–506.Forster F (1937) Einneues MessverfahrenzurBestimmung des
Elastizitats-moduls undder Dampfung, Z. Metallkd 29:
109–115.Friswell MI and Mottershead JE (1995) Finite element model
updating in structural dynamics. The Netherlands: Kluwer
Academic Publishers.Hasancebi O and Kazemzadeh Azad S (2015) Adaptive
dimensional search: a new metaheuristic algorithm for dis-
crete truss sizing optimization. Computers and Structures
154: 1–16.Hasancebi O and Kazemzadeh Azad S (2014) Discrete size
optimization of steel trusses using a refined big bang–big
crunch algorithm. Engineering Optimization 46: 61–83.Jin G, Chen H, Du J, Yang T and Li W (2010) The influence
of edge restraining stiffness on the transverse vibrations of
rectangular plate structures. Journal of Marine Science
Applications 9: 393–402.Jin G, Ye T, Ma X, Chen Y, Su Z and Xie X (2013) A unified
approach for the vibration analysis of moderately thick
composite laminated cylindrical shells with arbitrary
boundary conditions. International Journal of Mechanical
Science 75: 357–376.
Goni et al. 15
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from

Jin G, Ye T, Jia X and Gao S (2014a) A general Fouriersolution for the vibration analysis of composite laminatedstructure elements of revolution with general elastic
restraints. Composite Structure 109: 150–168.Jin G, Zhu S, Ye T and Jia X (2014b) Three-dimensional
vibration analysis of isotropic and orthotropic conicalshells with elastic boundary restraints. International
Journal of Mechanical Science 89: 207–221.Jin G, Su Z, Shi S, Ye T and Gao S (2014c) Three-dimen-
sional exact solution for the free vibration of arbitrarily
thick functionally graded rectangular plates with generalboundary conditions. Composite Structure 108: 565–577.
Jung H (1992) Structural dynamic model updating using eigen
sensitivity analysis. PhD Thesis. Imperial College ofScience, Technology and Medicine, London, UK.
Kazemzadeh Azad S, Hasancebi O and Kazemzadeh Azad S
(2013) Upper bound strategy for metaheuristic baseddesign optimization of steel frames. Advances inEngineering Software 57: 19–32.
Kazemzadeh Azad S, Hasancebi O and Saka MP (2014)
Guided stochastic search technique for discrete sizing opti-mization of steel trusses: A design-driven heuristicapproach. Computers and Structures 134: 62–74.
Kazemzadeh Azad S and Hasancebi O (2014) An elitist self-adaptive step-size search for structural design optimiza-tion. Applied Soft Computing 19: 226–235.
Kazemzadeh Azad S and Hasancebi O (2015a)Computationally Efficient Discrete Sizing of SteelFrames via Guided Stochastic Search Heuristic.Computers and Structures 156: 12–28.
Kazemzadeh Azad S and Hasancebi O (2015b) Discrete sizingoptimization of steel trusses under multiple displacementconstraints and load cases using guided stochastic search
technique. Structural and Multidisciplinary Optimization52: 383–404.
Lee CR and Kam TY (2006) System identification of partially
restrained composite plates using measured natural fre-
quencies. Journal of Engineering Mechanics. ASCE 132:
841–850.Lin RM, Lim MK and Du H (1993) Improved inverse eigen
sensitivity method for structural analytical model updat-
ing. Journal of Vibration and Acoustics 117: 192–198.
Mishra AK and Chakraborty S (2015) Determination of
material parameters of frp plates with rotational flexibility
at boundaries using experimental modal testing and model
updating. Experimental Mechanics 55: 803–815.Su Z, Jin G, Shi S, Ye T and Jia X (2014) A unified solution
for vibration analysis of functionally graded cylindrical,
conical shells and annular plates with general boundary
conditions. International Journal of Mechanical Science
80: 62–80.Ye T, Jin G, Su Z and Chen Y (2014) A modified Fourier
solution for vibration analysis of moderately thick lami-
nated plates with general boundary restraints and internal
line supports. International Journal of Mechanical Science
80: 29–46.Yesilyurt I and Gursoy H (2013) Estimation of elastic and
modal parameters in composites using vibration analysis,
Journal of Vibration and Control 21(3): 509–524.Yu G, Zhao Y and Wei Z (2007) A descent nonlinear con-
jugate gradient method for large-scale unconstrained opti-
mization. Applied Mathematics and Computation 187: 636–
643.Zhang Z, Shankar K, Morozov EV and Tahtali M (2014)
Vibration-based delamination detection in composite
beams through frequency changes, Journal of Vibration
and Control. Epub ahead of print 20 May 2014. DOI:
10.1177/1077546314533584.
16 Journal of Vibration and Control
at INDIAN INSTITUTE OF TECH on February 24, 2016jvc.sagepub.comDownloaded from