Embed Size (px)
Citation preview

UNMANNED SURFACE VEHICLES
By:- Niranjan J M (1RL10ME051) RLJIT
R.L.JALAPPA INSTITUTE OF TECHNOLOGY
Department of Mechanical engineering
TECHNICAL SEMINAR ON

INTRODUCTION
Unmanned surface vehicles (USV) are vehicles that operate on the surface of the water without a crew. USV are remotely operated “drones”
USV it’s also called as Autonomous surface vehicles (ASV). The use of USVs for tasks such as shallow-water surveying, weapon
delivery, environmental data gathering, surveillance, anti-submarine warfare, bottom of sea investigation, mine search ect.
Functionally, USV are much simpler than Autonomous Underwater vehicles (AUV) and yet quite versatile for the kinds of mission that they are able to perform.
The developement of USV started in 1990 almost world war second by US Navy and the US Navy much strong focus on ocean warfare and anti-terrorism missions.
Successful missions of USVs in the second Gulf war.

To reduce risk of man forces.
To save the precious life of soldiers.
Perform tasks which manned vehicles cannot done.
Act as a force multiplier for security operation.
Day and Night operation equipment.
USVs are more cheaper than commercial-ship.
IMPORTANCE OF USV

Groups are classified based on Carderock Laboratory into 4 types:
Small(<1 t) Medium(<100 t) Large(<1000 t) Extra large(>1000 t)
All USVs have small and medium size. Most USVs are about the size of recreational watercraft, i.e.2 to 15 m long with displacements of 1.5 to 10 t.
GROUPS OF USV

Most USV developments are found in the USA. World War II saw the first experimentation with USVs. Canadians developed the COMOX torpedo concept in 1944. COMOX was designated a torpedo because it could only be
programmed to traverse a fixed course. In the 1954,the US Navy Mine Defense Laboratory’s project
DRONE constructed and tested a remotely operated minesweeping boat.
By the 1960,the Navy was using target drone boats based on remote –controlled "aviation rescue" boats for missile firing practice.
By the 1900,the Navy developed and tested more sophisticated USV mine sweeping system.
HISTORIC BACKGROUND

EXAMPLES OF USV:
PROTECTOR OWL MK II
SPARTAN BASIL

Springer USV is designed primarily for undertaking pollutant tracking and environmental and hydrographical surveys in rivers, reservoirs, inland waterways and coastal waters, particularly where shallow waters prevail.
The Springer USV was designed as a medium waterplane twin hull vessel. Springer is portable and capable of operating in water from 1m to 60m deep.
It is approximately 4m long and 2.3m wide with a displacement of 0.6t. Each hull is divided into three watertight compartments.
The navigation, guidance & control (NGC) system is carried in watertight Peli cases and secured in a bay area between the crossbeams. This facilitates the quick substitution of systems on shore or at sea.
SPRINGER USV

Figure . The Springer Unmanned Surface Vehicle (USV).

Fig: Side view of the Springer unmanned surface vehicle

The batteries which are used to provide the power for the propulsion system and onboard electronics are carried within the hulls. The propulsion system powered by four 12 V gel technology batteries that are placed in each hull.
These are paired together to supply 24 V where each battery is capable of sourcing 135 A h of current.
Kill switches are used on both sides of hull to act as an emergency stop. When either of button is pressed, the motor stop running and all electronics is still powered.
The peli case consists of daq pc, navigation pc, guidance & control pc, sensors, wireless router.
A tower has also been installed to carry the GPS and wireless antennas. The wireless antenna is used for communication between the vessel and its user and it is also utilised for remote monitoring purpose and to alter mission parameters.

Fig. Layout of peli cases

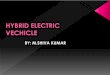
In Springer, the integrated sensor suite combines a GPS, compasses, speed log and depth sensor. All of these sensors are interfaced to a PC via serial connector.
The DAQ PC acquires data from all the sensors and transmits them over the serial cable to the navigation and control PCs.
TCM2, HMR3000 & KVH-C100 are three types of electronic compass installed in the Springer.
A Garmin GPS 15L is utilised in Springer to supply real time position information and tracks up to 12 satellites with a 1Hz update rate.
A Raymarine ST40 depth sensor and a speed log are mounted at the bottom of Springer to provide real-time depth and speed information of the vehicle.
NAVIGATION SENSOR SUIT

Fig: Springer sensor suite

Depth and Speed sensors are placed on the bottom of right and left hull in rear section.
All other sensors are placed within the Peil cases.
Fig :a)shows the peil case placed on the hull
Fig :b)shows the sensors placed on the bottom of hull in rear section

APPLICATIONS
Mine search Search bottom of ship with ROV
Bottom of sea investigation Search with underwater camera

USV provides some level of intelligence, surveillance, and reconnaissance capability.
More complex sensors are required for anti-submarine warfare capability requirement.
USV Springer are designed for undertaking pollution tracking and environmental and hydrographical surveys in rivers.
these USV can save precious life of soldier. And reduce man power.
USV are more stable and offers more mission functionality.
CONCLUSION

Unmanned Surface Vehicles – A Survey Volker Bertram ENSIETA, 2 rue François Verny, F-29806 Brest, France, [email protected]
Corfield SJ and Young JM. 2006. Unmanned surface vehicles – game changing technology for naval operations. In Roberts GN and Sutton R (Eds), Advances in Unmanned Marine Vehicles, IEE.
Majohr J and Buch T. 2006. Modelling, simulation and control of an autonomous surface marine vehicle for surveying applications Measuring Dolphin MESSIN. In Roberts GN and Sutton R (Eds), Advances in Unmanned Marine Vehicles, IEE.
Adaptive navigation systems for an unmanned surface vehicle Prof R Sutton PhD, CEng, FIMechE, FIET, and Dr S Sharma PhD, Marine and Industrial, Plymouth University, UK Dr T Xao PhD, CEng, MIET, School of Engineering and Computing Sciences, Durham University, UK
REFERENCES

THANK YOU