Embed Size (px)
Citation preview

Dave WilsonSr Industrial Systems Engineer
BLDC Motors and Control
PMSM Motors
In Todayrsquos Exciting Episodehellip
Field Oriented Control
Sensorless FOC
TI Motor Control Solutions
N
STo
rque
Clo
ckw
ise
Cou
nter
-Clo
ckw
ise
θ360deg
Torque in a BLDC Motor
B
B
C
CN
S
A
AC
urre
nt
A
B
C
N
S
Commutating a BLDC Motor
B
B
C
C
N
S
A
ATo
rque
Cur
rent
0deg
A
B
C
A
B
C
0deg
)()4( INBlrTorque =)()( IkT=
Control of a Brushless DC Motor
12 zones in 360 degreesof mechanical rotation
1
2
3
4
5
6
BA
C
s
rtC
ontr
olle
r
110
Source Eastern Air Devices Inc Brushless DC Motor Brochure
120 0 hall spacing is preferred over 60 0
spacing since unpowered or
unconnected sensors produce 111 or 000
codes which can be used for fault
detection
BLDC CommutationQ1
Fault input signal
Q3
Q4
Q5
Q6
Q2
Hall C
Hall B
Hall A
Commutation of a Brushless DC Motor
NS
NS
NN
S
NS
C
C
CC
A
A
A
A
B
B
B
B
N N
S
S
N
N
S S
NS
NS
NS
NS
NNS
S
NN
S
S
N
S
N
S
N
N
S
S
NS
S
N
NN
S
S
N
N
S
S
S
N
S
N
S
N
S
N
NS
SN
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
NS
NS
NS
SN
Sensorless BLDC Control
Con
trol
ler
Source Eastern Air Devices Inc Brushless DC Motor Brochure
Conditioning
Back EMF in a Single Loop of Wire
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
N
S
Uniform airgap flux density
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Uniformwindingdensity
Back EMF in a Multi-turn Winding
PWM 1
PWM 3
PWM 5
PWM 2
PWM 4
PWM 6
Phase R
Phase S
Phase T
0 60 120 180 240 300 360Rotor Electrical Position (Degrees)
Sensorless Commutation
Zero crossings
bull In a sensorless BLDC system only two coils are ldquoonrdquo at any moment in time The equivalent circuit of the motor with only two phases ldquoonrdquo is shown below
bull After the inductive flyback associated with Za has extinguished The internal voltages are visible when measuring Va Assuming balanced windings where Zband Zc are equal and Eb and Ec are equal then the voltage at node N = Vdc_link2 Therefore the zero-crossing of Ea occurs when the Va reading is Vdc_link2
Sensorless Control of BLDC Motors
EaEb
Ec
Vdc
_lin
kZb
Zc
Za
Va
I
N
96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

BLDC Motors and Control
PMSM Motors
In Todayrsquos Exciting Episodehellip
Field Oriented Control
Sensorless FOC
TI Motor Control Solutions
N
STo
rque
Clo
ckw
ise
Cou
nter
-Clo
ckw
ise
θ360deg
Torque in a BLDC Motor
B
B
C
CN
S
A
AC
urre
nt
A
B
C
N
S
Commutating a BLDC Motor
B
B
C
C
N
S
A
ATo
rque
Cur
rent
0deg
A
B
C
A
B
C
0deg
)()4( INBlrTorque =)()( IkT=
Control of a Brushless DC Motor
12 zones in 360 degreesof mechanical rotation
1
2
3
4
5
6
BA
C
s
rtC
ontr
olle
r
110
Source Eastern Air Devices Inc Brushless DC Motor Brochure
120 0 hall spacing is preferred over 60 0
spacing since unpowered or
unconnected sensors produce 111 or 000
codes which can be used for fault
detection
BLDC CommutationQ1
Fault input signal
Q3
Q4
Q5
Q6
Q2
Hall C
Hall B
Hall A
Commutation of a Brushless DC Motor
NS
NS
NN
S
NS
C
C
CC
A
A
A
A
B
B
B
B
N N
S
S
N
N
S S
NS
NS
NS
NS
NNS
S
NN
S
S
N
S
N
S
N
N
S
S
NS
S
N
NN
S
S
N
N
S
S
S
N
S
N
S
N
S
N
NS
SN
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
NS
NS
NS
SN
Sensorless BLDC Control
Con
trol
ler
Source Eastern Air Devices Inc Brushless DC Motor Brochure
Conditioning
Back EMF in a Single Loop of Wire
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
N
S
Uniform airgap flux density
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Uniformwindingdensity
Back EMF in a Multi-turn Winding
PWM 1
PWM 3
PWM 5
PWM 2
PWM 4
PWM 6
Phase R
Phase S
Phase T
0 60 120 180 240 300 360Rotor Electrical Position (Degrees)
Sensorless Commutation
Zero crossings
bull In a sensorless BLDC system only two coils are ldquoonrdquo at any moment in time The equivalent circuit of the motor with only two phases ldquoonrdquo is shown below
bull After the inductive flyback associated with Za has extinguished The internal voltages are visible when measuring Va Assuming balanced windings where Zband Zc are equal and Eb and Ec are equal then the voltage at node N = Vdc_link2 Therefore the zero-crossing of Ea occurs when the Va reading is Vdc_link2
Sensorless Control of BLDC Motors
EaEb
Ec
Vdc
_lin
kZb
Zc
Za
Va
I
N
96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

N
STo
rque
Clo
ckw
ise
Cou
nter
-Clo
ckw
ise
θ360deg
Torque in a BLDC Motor
B
B
C
CN
S
A
AC
urre
nt
A
B
C
N
S
Commutating a BLDC Motor
B
B
C
C
N
S
A
ATo
rque
Cur
rent
0deg
A
B
C
A
B
C
0deg
)()4( INBlrTorque =)()( IkT=
Control of a Brushless DC Motor
12 zones in 360 degreesof mechanical rotation
1
2
3
4
5
6
BA
C
s
rtC
ontr
olle
r
110
Source Eastern Air Devices Inc Brushless DC Motor Brochure
120 0 hall spacing is preferred over 60 0
spacing since unpowered or
unconnected sensors produce 111 or 000
codes which can be used for fault
detection
BLDC CommutationQ1
Fault input signal
Q3
Q4
Q5
Q6
Q2
Hall C
Hall B
Hall A
Commutation of a Brushless DC Motor
NS
NS
NN
S
NS
C
C
CC
A
A
A
A
B
B
B
B
N N
S
S
N
N
S S
NS
NS
NS
NS
NNS
S
NN
S
S
N
S
N
S
N
N
S
S
NS
S
N
NN
S
S
N
N
S
S
S
N
S
N
S
N
S
N
NS
SN
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
NS
NS
NS
SN
Sensorless BLDC Control
Con
trol
ler
Source Eastern Air Devices Inc Brushless DC Motor Brochure
Conditioning
Back EMF in a Single Loop of Wire
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
N
S
Uniform airgap flux density
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Uniformwindingdensity
Back EMF in a Multi-turn Winding
PWM 1
PWM 3
PWM 5
PWM 2
PWM 4
PWM 6
Phase R
Phase S
Phase T
0 60 120 180 240 300 360Rotor Electrical Position (Degrees)
Sensorless Commutation
Zero crossings
bull In a sensorless BLDC system only two coils are ldquoonrdquo at any moment in time The equivalent circuit of the motor with only two phases ldquoonrdquo is shown below
bull After the inductive flyback associated with Za has extinguished The internal voltages are visible when measuring Va Assuming balanced windings where Zband Zc are equal and Eb and Ec are equal then the voltage at node N = Vdc_link2 Therefore the zero-crossing of Ea occurs when the Va reading is Vdc_link2
Sensorless Control of BLDC Motors
EaEb
Ec
Vdc
_lin
kZb
Zc
Za
Va
I
N
96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

B
B
C
CN
S
A
AC
urre
nt
A
B
C
N
S
Commutating a BLDC Motor
B
B
C
C
N
S
A
ATo
rque
Cur
rent
0deg
A
B
C
A
B
C
0deg
)()4( INBlrTorque =)()( IkT=
Control of a Brushless DC Motor
12 zones in 360 degreesof mechanical rotation
1
2
3
4
5
6
BA
C
s
rtC
ontr
olle
r
110
Source Eastern Air Devices Inc Brushless DC Motor Brochure
120 0 hall spacing is preferred over 60 0
spacing since unpowered or
unconnected sensors produce 111 or 000
codes which can be used for fault
detection
BLDC CommutationQ1
Fault input signal
Q3
Q4
Q5
Q6
Q2
Hall C
Hall B
Hall A
Commutation of a Brushless DC Motor
NS
NS
NN
S
NS
C
C
CC
A
A
A
A
B
B
B
B
N N
S
S
N
N
S S
NS
NS
NS
NS
NNS
S
NN
S
S
N
S
N
S
N
N
S
S
NS
S
N
NN
S
S
N
N
S
S
S
N
S
N
S
N
S
N
NS
SN
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
NS
NS
NS
SN
Sensorless BLDC Control
Con
trol
ler
Source Eastern Air Devices Inc Brushless DC Motor Brochure
Conditioning
Back EMF in a Single Loop of Wire
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
N
S
Uniform airgap flux density
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Uniformwindingdensity
Back EMF in a Multi-turn Winding
PWM 1
PWM 3
PWM 5
PWM 2
PWM 4
PWM 6
Phase R
Phase S
Phase T
0 60 120 180 240 300 360Rotor Electrical Position (Degrees)
Sensorless Commutation
Zero crossings
bull In a sensorless BLDC system only two coils are ldquoonrdquo at any moment in time The equivalent circuit of the motor with only two phases ldquoonrdquo is shown below
bull After the inductive flyback associated with Za has extinguished The internal voltages are visible when measuring Va Assuming balanced windings where Zband Zc are equal and Eb and Ec are equal then the voltage at node N = Vdc_link2 Therefore the zero-crossing of Ea occurs when the Va reading is Vdc_link2
Sensorless Control of BLDC Motors
EaEb
Ec
Vdc
_lin
kZb
Zc
Za
Va
I
N
96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

B
B
C
C
N
S
A
ATo
rque
Cur
rent
0deg
A
B
C
A
B
C
0deg
)()4( INBlrTorque =)()( IkT=
Control of a Brushless DC Motor
12 zones in 360 degreesof mechanical rotation
1
2
3
4
5
6
BA
C
s
rtC
ontr
olle
r
110
Source Eastern Air Devices Inc Brushless DC Motor Brochure
120 0 hall spacing is preferred over 60 0
spacing since unpowered or
unconnected sensors produce 111 or 000
codes which can be used for fault
detection
BLDC CommutationQ1
Fault input signal
Q3
Q4
Q5
Q6
Q2
Hall C
Hall B
Hall A
Commutation of a Brushless DC Motor
NS
NS
NN
S
NS
C
C
CC
A
A
A
A
B
B
B
B
N N
S
S
N
N
S S
NS
NS
NS
NS
NNS
S
NN
S
S
N
S
N
S
N
N
S
S
NS
S
N
NN
S
S
N
N
S
S
S
N
S
N
S
N
S
N
NS
SN
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
NS
NS
NS
SN
Sensorless BLDC Control
Con
trol
ler
Source Eastern Air Devices Inc Brushless DC Motor Brochure
Conditioning
Back EMF in a Single Loop of Wire
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
N
S
Uniform airgap flux density
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Uniformwindingdensity
Back EMF in a Multi-turn Winding
PWM 1
PWM 3
PWM 5
PWM 2
PWM 4
PWM 6
Phase R
Phase S
Phase T
0 60 120 180 240 300 360Rotor Electrical Position (Degrees)
Sensorless Commutation
Zero crossings
bull In a sensorless BLDC system only two coils are ldquoonrdquo at any moment in time The equivalent circuit of the motor with only two phases ldquoonrdquo is shown below
bull After the inductive flyback associated with Za has extinguished The internal voltages are visible when measuring Va Assuming balanced windings where Zband Zc are equal and Eb and Ec are equal then the voltage at node N = Vdc_link2 Therefore the zero-crossing of Ea occurs when the Va reading is Vdc_link2
Sensorless Control of BLDC Motors
EaEb
Ec
Vdc
_lin
kZb
Zc
Za
Va
I
N
96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

Control of a Brushless DC Motor
12 zones in 360 degreesof mechanical rotation
1
2
3
4
5
6
BA
C
s
rtC
ontr
olle
r
110
Source Eastern Air Devices Inc Brushless DC Motor Brochure
120 0 hall spacing is preferred over 60 0
spacing since unpowered or
unconnected sensors produce 111 or 000
codes which can be used for fault
detection
BLDC CommutationQ1
Fault input signal
Q3
Q4
Q5
Q6
Q2
Hall C
Hall B
Hall A
Commutation of a Brushless DC Motor
NS
NS
NN
S
NS
C
C
CC
A
A
A
A
B
B
B
B
N N
S
S
N
N
S S
NS
NS
NS
NS
NNS
S
NN
S
S
N
S
N
S
N
N
S
S
NS
S
N
NN
S
S
N
N
S
S
S
N
S
N
S
N
S
N
NS
SN
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
NS
NS
NS
SN
Sensorless BLDC Control
Con
trol
ler
Source Eastern Air Devices Inc Brushless DC Motor Brochure
Conditioning
Back EMF in a Single Loop of Wire
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
N
S
Uniform airgap flux density
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Uniformwindingdensity
Back EMF in a Multi-turn Winding
PWM 1
PWM 3
PWM 5
PWM 2
PWM 4
PWM 6
Phase R
Phase S
Phase T
0 60 120 180 240 300 360Rotor Electrical Position (Degrees)
Sensorless Commutation
Zero crossings
bull In a sensorless BLDC system only two coils are ldquoonrdquo at any moment in time The equivalent circuit of the motor with only two phases ldquoonrdquo is shown below
bull After the inductive flyback associated with Za has extinguished The internal voltages are visible when measuring Va Assuming balanced windings where Zband Zc are equal and Eb and Ec are equal then the voltage at node N = Vdc_link2 Therefore the zero-crossing of Ea occurs when the Va reading is Vdc_link2
Sensorless Control of BLDC Motors
EaEb
Ec
Vdc
_lin
kZb
Zc
Za
Va
I
N
96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

BLDC CommutationQ1
Fault input signal
Q3
Q4
Q5
Q6
Q2
Hall C
Hall B
Hall A
Commutation of a Brushless DC Motor
NS
NS
NN
S
NS
C
C
CC
A
A
A
A
B
B
B
B
N N
S
S
N
N
S S
NS
NS
NS
NS
NNS
S
NN
S
S
N
S
N
S
N
N
S
S
NS
S
N
NN
S
S
N
N
S
S
S
N
S
N
S
N
S
N
NS
SN
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
NS
NS
NS
SN
Sensorless BLDC Control
Con
trol
ler
Source Eastern Air Devices Inc Brushless DC Motor Brochure
Conditioning
Back EMF in a Single Loop of Wire
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
N
S
Uniform airgap flux density
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Uniformwindingdensity
Back EMF in a Multi-turn Winding
PWM 1
PWM 3
PWM 5
PWM 2
PWM 4
PWM 6
Phase R
Phase S
Phase T
0 60 120 180 240 300 360Rotor Electrical Position (Degrees)
Sensorless Commutation
Zero crossings
bull In a sensorless BLDC system only two coils are ldquoonrdquo at any moment in time The equivalent circuit of the motor with only two phases ldquoonrdquo is shown below
bull After the inductive flyback associated with Za has extinguished The internal voltages are visible when measuring Va Assuming balanced windings where Zband Zc are equal and Eb and Ec are equal then the voltage at node N = Vdc_link2 Therefore the zero-crossing of Ea occurs when the Va reading is Vdc_link2
Sensorless Control of BLDC Motors
EaEb
Ec
Vdc
_lin
kZb
Zc
Za
Va
I
N
96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

Commutation of a Brushless DC Motor
NS
NS
NN
S
NS
C
C
CC
A
A
A
A
B
B
B
B
N N
S
S
N
N
S S
NS
NS
NS
NS
NNS
S
NN
S
S
N
S
N
S
N
N
S
S
NS
S
N
NN
S
S
N
N
S
S
S
N
S
N
S
N
S
N
NS
SN
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
C
C
CC
A
A
A
A
B
B
B
B
NS
NS
NS
SN
Sensorless BLDC Control
Con
trol
ler
Source Eastern Air Devices Inc Brushless DC Motor Brochure
Conditioning
Back EMF in a Single Loop of Wire
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
N
S
Uniform airgap flux density
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Uniformwindingdensity
Back EMF in a Multi-turn Winding
PWM 1
PWM 3
PWM 5
PWM 2
PWM 4
PWM 6
Phase R
Phase S
Phase T
0 60 120 180 240 300 360Rotor Electrical Position (Degrees)
Sensorless Commutation
Zero crossings
bull In a sensorless BLDC system only two coils are ldquoonrdquo at any moment in time The equivalent circuit of the motor with only two phases ldquoonrdquo is shown below
bull After the inductive flyback associated with Za has extinguished The internal voltages are visible when measuring Va Assuming balanced windings where Zband Zc are equal and Eb and Ec are equal then the voltage at node N = Vdc_link2 Therefore the zero-crossing of Ea occurs when the Va reading is Vdc_link2
Sensorless Control of BLDC Motors
EaEb
Ec
Vdc
_lin
kZb
Zc
Za
Va
I
N
96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

Sensorless BLDC Control
Con
trol
ler
Source Eastern Air Devices Inc Brushless DC Motor Brochure
Conditioning
Back EMF in a Single Loop of Wire
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
N
S
Uniform airgap flux density
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Uniformwindingdensity
Back EMF in a Multi-turn Winding
PWM 1
PWM 3
PWM 5
PWM 2
PWM 4
PWM 6
Phase R
Phase S
Phase T
0 60 120 180 240 300 360Rotor Electrical Position (Degrees)
Sensorless Commutation
Zero crossings
bull In a sensorless BLDC system only two coils are ldquoonrdquo at any moment in time The equivalent circuit of the motor with only two phases ldquoonrdquo is shown below
bull After the inductive flyback associated with Za has extinguished The internal voltages are visible when measuring Va Assuming balanced windings where Zband Zc are equal and Eb and Ec are equal then the voltage at node N = Vdc_link2 Therefore the zero-crossing of Ea occurs when the Va reading is Vdc_link2
Sensorless Control of BLDC Motors
EaEb
Ec
Vdc
_lin
kZb
Zc
Za
Va
I
N
96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

Back EMF in a Single Loop of Wire
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
N
S
Uniform airgap flux density
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Uniformwindingdensity
Back EMF in a Multi-turn Winding
PWM 1
PWM 3
PWM 5
PWM 2
PWM 4
PWM 6
Phase R
Phase S
Phase T
0 60 120 180 240 300 360Rotor Electrical Position (Degrees)
Sensorless Commutation
Zero crossings
bull In a sensorless BLDC system only two coils are ldquoonrdquo at any moment in time The equivalent circuit of the motor with only two phases ldquoonrdquo is shown below
bull After the inductive flyback associated with Za has extinguished The internal voltages are visible when measuring Va Assuming balanced windings where Zband Zc are equal and Eb and Ec are equal then the voltage at node N = Vdc_link2 Therefore the zero-crossing of Ea occurs when the Va reading is Vdc_link2
Sensorless Control of BLDC Motors
EaEb
Ec
Vdc
_lin
kZb
Zc
Za
Va
I
N
96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Uniformwindingdensity
Back EMF in a Multi-turn Winding
PWM 1
PWM 3
PWM 5
PWM 2
PWM 4
PWM 6
Phase R
Phase S
Phase T
0 60 120 180 240 300 360Rotor Electrical Position (Degrees)
Sensorless Commutation
Zero crossings
bull In a sensorless BLDC system only two coils are ldquoonrdquo at any moment in time The equivalent circuit of the motor with only two phases ldquoonrdquo is shown below
bull After the inductive flyback associated with Za has extinguished The internal voltages are visible when measuring Va Assuming balanced windings where Zband Zc are equal and Eb and Ec are equal then the voltage at node N = Vdc_link2 Therefore the zero-crossing of Ea occurs when the Va reading is Vdc_link2
Sensorless Control of BLDC Motors
EaEb
Ec
Vdc
_lin
kZb
Zc
Za
Va
I
N
96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

PWM 1
PWM 3
PWM 5
PWM 2
PWM 4
PWM 6
Phase R
Phase S
Phase T
0 60 120 180 240 300 360Rotor Electrical Position (Degrees)
Sensorless Commutation
Zero crossings
bull In a sensorless BLDC system only two coils are ldquoonrdquo at any moment in time The equivalent circuit of the motor with only two phases ldquoonrdquo is shown below
bull After the inductive flyback associated with Za has extinguished The internal voltages are visible when measuring Va Assuming balanced windings where Zband Zc are equal and Eb and Ec are equal then the voltage at node N = Vdc_link2 Therefore the zero-crossing of Ea occurs when the Va reading is Vdc_link2
Sensorless Control of BLDC Motors
EaEb
Ec
Vdc
_lin
kZb
Zc
Za
Va
I
N
96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

bull In a sensorless BLDC system only two coils are ldquoonrdquo at any moment in time The equivalent circuit of the motor with only two phases ldquoonrdquo is shown below
bull After the inductive flyback associated with Za has extinguished The internal voltages are visible when measuring Va Assuming balanced windings where Zband Zc are equal and Eb and Ec are equal then the voltage at node N = Vdc_link2 Therefore the zero-crossing of Ea occurs when the Va reading is Vdc_link2
Sensorless Control of BLDC Motors
EaEb
Ec
Vdc
_lin
kZb
Zc
Za
Va
I
N
96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

96 BLDC Motor Efficiency
Using iron based amorphous core material Japanese researchers at Tokai University break 96 efficiency barrier
asymp 100W
High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

High power output per frame sizeEasy to control with trapezoidal commutationHigh efficiency due to small rotor lossesLow profile designs possibleExcellent high speed performanceStructure inherently allows heat to be removed easier
Slightly more torque ripple than sinusoidal motorsField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp
Advantages
Disadvantages
Brushless DC Motor Summary
Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

Brushless DC with Hall Feedback
Stellaris LM3S8971
Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

Torque Ripple from Commutation
0 30 60 90 120 150 180 210 240 270 300 330 360 390
id0
iA
0 30 60 90 120 150 180 210 240 270 300 330 360 390
Torgue
Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

Permanent Magnet AC Motor
bull This motor exhibits a smoothly rotating magnetic field where the magnetic gradient of the stator flux is illustrated by the color shading There is no commutation to cause motor jerking But how do you create such a smoothly rotating magnetic field
Animation by Ken Berringer
Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

Sinusoidal Winding Distribution
Stator winding density is sinusoidally distributedthus creating a sinusoidally distributed flux density
Phase A shown
Source Electric Drives an Integrative Approachby Ned Mohan University of Minn Printing Services 2000
Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

Source Mahmoud Riaz ScD Professor of Electrical Engineering Department of Electrical and Computer Engineering University of Minnesota
Flux Resulting from Sinusoidal Current
Pretty cool but no
rotating vector

Adding More PhasesPhase A Phase B Phase C
A
B
C
PMSM Motors Summary
High power output per frame sizeHigh efficiency due to small rotor lossesLow profile designs possibleVery low torque rippleStructure inherently allows heat to be removed easier Zero speed sensorless operation possible with IPM motors
More elaborate control required compared to BLDCHigh rotor angle accuracy required vs BLDC trapezoidalField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp (not as much of a problem with IPM motors)
Advantages
Disadvantages
PMSM Load Angle
Animation by Ken Berringer
00s 03s 06s 09s 12s 15s 18s 21s 24s 27s 30s 33s 36s-200V
-150V
-100V
-50V
0V
50V
100V
150V
200VV(treaction)
Simulated Reactance Torque as a function of angle delta
from 2005 Prius Traction Motor
0o 30o 60o 90o 120o 150o 180o-30o-60o-90o-120o-150o-180o
50
100
150
200
0
-50
-100
-150
-200
New
ton-
Met
ers
Maximum torque per amp
Orientation of Field for Max Torque
Source Electric Drives an Integrative Approach by Ned Mohan University of Minn Printing Services 2000
(Reluctance torque assumed to be zero)
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
S
N
+24 V
0015
PWM1
PWM1PWM2
PWM2PWM1
PWM2
PIController
-
+
ADC1
Desired Current
Measured Current
Error Signal
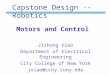
Measure current already flowing in the motor1
Compare the measured current with the desired current and generate an error signal2
Amplify the error signal to generate a correction voltage3
Modulate the correction voltage onto the motor terminals4
Commutator keeps rotor and stator fields
properly aligned
Brush DC Motor
How Do You Control Torqueon a DC Motor
Texas Instruments
DaversquosMotor Control
Center
[ ]qsdr IPTorque λ22
3=
Constant (for now)
How Do You Control Torque on a PMSM
Constant
Adjustable
S
N
S
N
S
N
InterruptMeasure rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
InterruptMeasure new rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
InterruptMeasure new rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
A
B
C
AB
C
i b
i c
i a
(implied)
Controllerwith AD
i ai bi c
Measure and From Kirkoffrsquos current law calculate
i a i b i c
A B and C axes are ldquofixedrdquo with respect to the motor housing This reference frame is also called the
ldquostationary framerdquo or ldquostator framerdquo
1 Measure current already flowing in the motor
net current vector
ia
ib
ic
Texas Instruments
DaversquosMotor Control
Center
A
B
C
si
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
We must regulate the current vector magnitude AND angle by regulating ia ib and ic
Rotor flux axis
N
S
θd
Part A Measure the rotor angle to determine if the net current vector is oriented at 90o with respect to
the rotor flux
This is called the ldquodirectrdquo or ldquodrdquo axis
Usually accomplished with a resolver or encoder
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βiPart B Convert the three phase
current vectors into two orthogonal vectors that will result in the same net current vector In other words convert the 3-phase motor to a 2-phase motor Then we only have two current values
to regulate instead of three
This is often referred to as the FORWARD CLARK TRANSFORMATION
A
B
C
si
aii 23=α
cb iii 23
23 minus=βia(t) ib(t) ic(t) iβ(t)iα(t)
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βi
A
B
C
si
ddq
ddd
iii
iii
θθ
θθ
βα
βα
cossin
sincos
+minus=
+=
4 trig calulations7 multiplications3 additions
Total
θdd axis
q axis
rotor flux axis
i q
i d
Part C Jump up on the rotating reference frame
whose x-axis is the rotor flux axis
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
Part D and are handled independently Since the comparison is performed in the rotating frame motor AC frequency
is not seen Thus they are DC quantities
i d +
-
error(t)
+
-
error(t)
i q
i q (commanded)
(measured)
can however be used to weaken the field of the machinecontrols amount of torque generated by the motor
i di q
i d i q
(commanded)
i d (measured)
Under normal conditions we have all the d-axis flux we need supplied by the permanent magnets in the rotor
So commanded id is set to zero
This is how much torque we want
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
i d
int I
P+ +
+-
error(t)
int I
P+ +
+-
error(t)
(commanded)
i d (measured)
i q
i q (commanded)
(measured)
vd
vq
3 Amplify the error signals to generate correction voltages
The PI regulator is a good choice for current regulation
Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

PMSM Motors Summary
High power output per frame sizeHigh efficiency due to small rotor lossesLow profile designs possibleVery low torque rippleStructure inherently allows heat to be removed easier Zero speed sensorless operation possible with IPM motors
More elaborate control required compared to BLDCHigh rotor angle accuracy required vs BLDC trapezoidalField weakening requires additional currentPermanent magnetic field causes viscous dragPermanent magnets can be demagnetized at high temp (not as much of a problem with IPM motors)
Advantages
Disadvantages
PMSM Load Angle
Animation by Ken Berringer
00s 03s 06s 09s 12s 15s 18s 21s 24s 27s 30s 33s 36s-200V
-150V
-100V
-50V
0V
50V
100V
150V
200VV(treaction)
Simulated Reactance Torque as a function of angle delta
from 2005 Prius Traction Motor
0o 30o 60o 90o 120o 150o 180o-30o-60o-90o-120o-150o-180o
50
100
150
200
0
-50
-100
-150
-200
New
ton-
Met
ers
Maximum torque per amp
Orientation of Field for Max Torque
Source Electric Drives an Integrative Approach by Ned Mohan University of Minn Printing Services 2000
(Reluctance torque assumed to be zero)
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
S
N
+24 V
0015
PWM1
PWM1PWM2
PWM2PWM1
PWM2
PIController
-
+
ADC1
Desired Current
Measured Current
Error Signal
Measure current already flowing in the motor1
Compare the measured current with the desired current and generate an error signal2
Amplify the error signal to generate a correction voltage3
Modulate the correction voltage onto the motor terminals4
Commutator keeps rotor and stator fields
properly aligned
Brush DC Motor
How Do You Control Torqueon a DC Motor
Texas Instruments
DaversquosMotor Control
Center
[ ]qsdr IPTorque λ22
3=
Constant (for now)
How Do You Control Torque on a PMSM
Constant
Adjustable
S
N
S
N
S
N
InterruptMeasure rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
InterruptMeasure new rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
InterruptMeasure new rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
A
B
C
AB
C
i b
i c
i a
(implied)
Controllerwith AD
i ai bi c
Measure and From Kirkoffrsquos current law calculate
i a i b i c
A B and C axes are ldquofixedrdquo with respect to the motor housing This reference frame is also called the
ldquostationary framerdquo or ldquostator framerdquo
1 Measure current already flowing in the motor
net current vector
ia
ib
ic
Texas Instruments
DaversquosMotor Control
Center
A
B
C
si
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
We must regulate the current vector magnitude AND angle by regulating ia ib and ic
Rotor flux axis
N
S
θd
Part A Measure the rotor angle to determine if the net current vector is oriented at 90o with respect to
the rotor flux
This is called the ldquodirectrdquo or ldquodrdquo axis
Usually accomplished with a resolver or encoder
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βiPart B Convert the three phase
current vectors into two orthogonal vectors that will result in the same net current vector In other words convert the 3-phase motor to a 2-phase motor Then we only have two current values
to regulate instead of three
This is often referred to as the FORWARD CLARK TRANSFORMATION
A
B
C
si
aii 23=α
cb iii 23
23 minus=βia(t) ib(t) ic(t) iβ(t)iα(t)
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βi
A
B
C
si
ddq
ddd
iii
iii
θθ
θθ
βα
βα
cossin
sincos
+minus=
+=
4 trig calulations7 multiplications3 additions
Total
θdd axis
q axis
rotor flux axis
i q
i d
Part C Jump up on the rotating reference frame
whose x-axis is the rotor flux axis
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
Part D and are handled independently Since the comparison is performed in the rotating frame motor AC frequency
is not seen Thus they are DC quantities
i d +
-
error(t)
+
-
error(t)
i q
i q (commanded)
(measured)
can however be used to weaken the field of the machinecontrols amount of torque generated by the motor
i di q
i d i q
(commanded)
i d (measured)
Under normal conditions we have all the d-axis flux we need supplied by the permanent magnets in the rotor
So commanded id is set to zero
This is how much torque we want
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
i d
int I
P+ +
+-
error(t)
int I
P+ +
+-
error(t)
(commanded)
i d (measured)
i q
i q (commanded)
(measured)
vd
vq
3 Amplify the error signals to generate correction voltages
The PI regulator is a good choice for current regulation
Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

PMSM Load Angle
Animation by Ken Berringer
00s 03s 06s 09s 12s 15s 18s 21s 24s 27s 30s 33s 36s-200V
-150V
-100V
-50V
0V
50V
100V
150V
200VV(treaction)
Simulated Reactance Torque as a function of angle delta
from 2005 Prius Traction Motor
0o 30o 60o 90o 120o 150o 180o-30o-60o-90o-120o-150o-180o
50
100
150
200
0
-50
-100
-150
-200
New
ton-
Met
ers
Maximum torque per amp
Orientation of Field for Max Torque
Source Electric Drives an Integrative Approach by Ned Mohan University of Minn Printing Services 2000
(Reluctance torque assumed to be zero)
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
S
N
+24 V
0015
PWM1
PWM1PWM2
PWM2PWM1
PWM2
PIController
-
+
ADC1
Desired Current
Measured Current
Error Signal
Measure current already flowing in the motor1
Compare the measured current with the desired current and generate an error signal2
Amplify the error signal to generate a correction voltage3
Modulate the correction voltage onto the motor terminals4
Commutator keeps rotor and stator fields
properly aligned
Brush DC Motor
How Do You Control Torqueon a DC Motor
Texas Instruments
DaversquosMotor Control
Center
[ ]qsdr IPTorque λ22
3=
Constant (for now)
How Do You Control Torque on a PMSM
Constant
Adjustable
S
N
S
N
S
N
InterruptMeasure rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
InterruptMeasure new rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
InterruptMeasure new rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
A
B
C
AB
C
i b
i c
i a
(implied)
Controllerwith AD
i ai bi c
Measure and From Kirkoffrsquos current law calculate
i a i b i c
A B and C axes are ldquofixedrdquo with respect to the motor housing This reference frame is also called the
ldquostationary framerdquo or ldquostator framerdquo
1 Measure current already flowing in the motor
net current vector
ia
ib
ic
Texas Instruments
DaversquosMotor Control
Center
A
B
C
si
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
We must regulate the current vector magnitude AND angle by regulating ia ib and ic
Rotor flux axis
N
S
θd
Part A Measure the rotor angle to determine if the net current vector is oriented at 90o with respect to
the rotor flux
This is called the ldquodirectrdquo or ldquodrdquo axis
Usually accomplished with a resolver or encoder
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βiPart B Convert the three phase
current vectors into two orthogonal vectors that will result in the same net current vector In other words convert the 3-phase motor to a 2-phase motor Then we only have two current values
to regulate instead of three
This is often referred to as the FORWARD CLARK TRANSFORMATION
A
B
C
si
aii 23=α
cb iii 23
23 minus=βia(t) ib(t) ic(t) iβ(t)iα(t)
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βi
A
B
C
si
ddq
ddd
iii
iii
θθ
θθ
βα
βα
cossin
sincos
+minus=
+=
4 trig calulations7 multiplications3 additions
Total
θdd axis
q axis
rotor flux axis
i q
i d
Part C Jump up on the rotating reference frame
whose x-axis is the rotor flux axis
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
Part D and are handled independently Since the comparison is performed in the rotating frame motor AC frequency
is not seen Thus they are DC quantities
i d +
-
error(t)
+
-
error(t)
i q
i q (commanded)
(measured)
can however be used to weaken the field of the machinecontrols amount of torque generated by the motor
i di q
i d i q
(commanded)
i d (measured)
Under normal conditions we have all the d-axis flux we need supplied by the permanent magnets in the rotor
So commanded id is set to zero
This is how much torque we want
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
i d
int I
P+ +
+-
error(t)
int I
P+ +
+-
error(t)
(commanded)
i d (measured)
i q
i q (commanded)
(measured)
vd
vq
3 Amplify the error signals to generate correction voltages
The PI regulator is a good choice for current regulation
Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Orientation of Field for Max Torque
Source Electric Drives an Integrative Approach by Ned Mohan University of Minn Printing Services 2000
(Reluctance torque assumed to be zero)
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
S
N
+24 V
0015
PWM1
PWM1PWM2
PWM2PWM1
PWM2
PIController
-
+
ADC1
Desired Current
Measured Current
Error Signal
Measure current already flowing in the motor1
Compare the measured current with the desired current and generate an error signal2
Amplify the error signal to generate a correction voltage3
Modulate the correction voltage onto the motor terminals4
Commutator keeps rotor and stator fields
properly aligned
Brush DC Motor
How Do You Control Torqueon a DC Motor
Texas Instruments
DaversquosMotor Control
Center
[ ]qsdr IPTorque λ22
3=
Constant (for now)
How Do You Control Torque on a PMSM
Constant
Adjustable
S
N
S
N
S
N
InterruptMeasure rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
InterruptMeasure new rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
InterruptMeasure new rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
A
B
C
AB
C
i b
i c
i a
(implied)
Controllerwith AD
i ai bi c
Measure and From Kirkoffrsquos current law calculate
i a i b i c
A B and C axes are ldquofixedrdquo with respect to the motor housing This reference frame is also called the
ldquostationary framerdquo or ldquostator framerdquo
1 Measure current already flowing in the motor
net current vector
ia
ib
ic
Texas Instruments
DaversquosMotor Control
Center
A
B
C
si
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
We must regulate the current vector magnitude AND angle by regulating ia ib and ic
Rotor flux axis
N
S
θd
Part A Measure the rotor angle to determine if the net current vector is oriented at 90o with respect to
the rotor flux
This is called the ldquodirectrdquo or ldquodrdquo axis
Usually accomplished with a resolver or encoder
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βiPart B Convert the three phase
current vectors into two orthogonal vectors that will result in the same net current vector In other words convert the 3-phase motor to a 2-phase motor Then we only have two current values
to regulate instead of three
This is often referred to as the FORWARD CLARK TRANSFORMATION
A
B
C
si
aii 23=α
cb iii 23
23 minus=βia(t) ib(t) ic(t) iβ(t)iα(t)
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βi
A
B
C
si
ddq
ddd
iii
iii
θθ
θθ
βα
βα
cossin
sincos
+minus=
+=
4 trig calulations7 multiplications3 additions
Total
θdd axis
q axis
rotor flux axis
i q
i d
Part C Jump up on the rotating reference frame
whose x-axis is the rotor flux axis
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
Part D and are handled independently Since the comparison is performed in the rotating frame motor AC frequency
is not seen Thus they are DC quantities
i d +
-
error(t)
+
-
error(t)
i q
i q (commanded)
(measured)
can however be used to weaken the field of the machinecontrols amount of torque generated by the motor
i di q
i d i q
(commanded)
i d (measured)
Under normal conditions we have all the d-axis flux we need supplied by the permanent magnets in the rotor
So commanded id is set to zero
This is how much torque we want
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
i d
int I
P+ +
+-
error(t)
int I
P+ +
+-
error(t)
(commanded)
i d (measured)
i q
i q (commanded)
(measured)
vd
vq
3 Amplify the error signals to generate correction voltages
The PI regulator is a good choice for current regulation
Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom
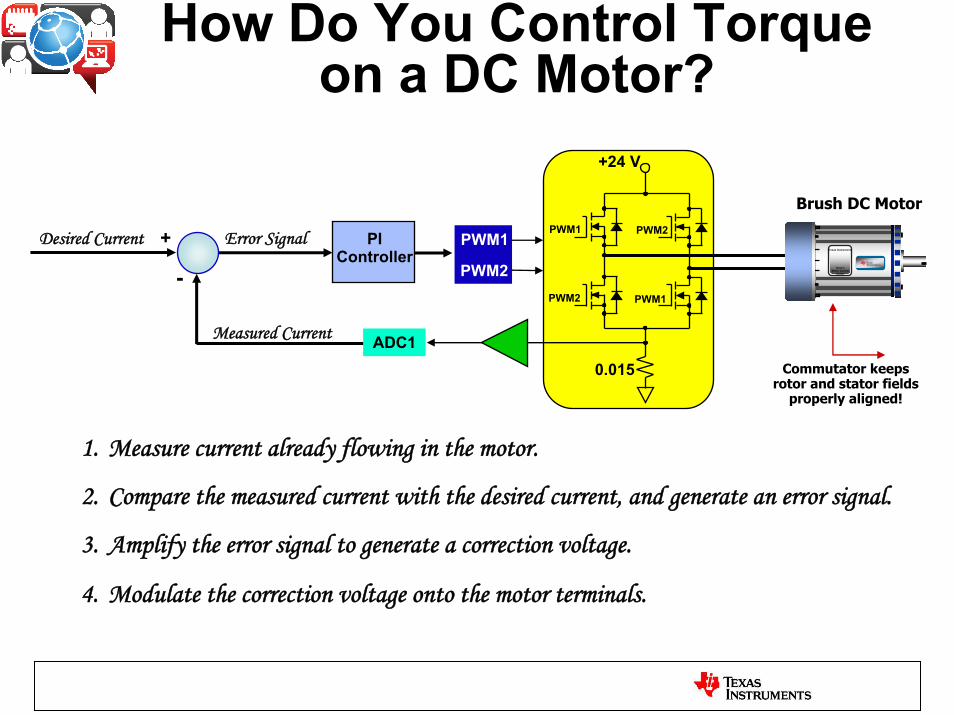
+24 V
0015
PWM1
PWM1PWM2
PWM2PWM1
PWM2
PIController
-
+
ADC1
Desired Current
Measured Current
Error Signal
Measure current already flowing in the motor1
Compare the measured current with the desired current and generate an error signal2
Amplify the error signal to generate a correction voltage3
Modulate the correction voltage onto the motor terminals4
Commutator keeps rotor and stator fields
properly aligned
Brush DC Motor
How Do You Control Torqueon a DC Motor
Texas Instruments
DaversquosMotor Control
Center
[ ]qsdr IPTorque λ22
3=
Constant (for now)
How Do You Control Torque on a PMSM
Constant
Adjustable
S
N
S
N
S
N
InterruptMeasure rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
InterruptMeasure new rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
InterruptMeasure new rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
A
B
C
AB
C
i b
i c
i a
(implied)
Controllerwith AD
i ai bi c
Measure and From Kirkoffrsquos current law calculate
i a i b i c
A B and C axes are ldquofixedrdquo with respect to the motor housing This reference frame is also called the
ldquostationary framerdquo or ldquostator framerdquo
1 Measure current already flowing in the motor
net current vector
ia
ib
ic
Texas Instruments
DaversquosMotor Control
Center
A
B
C
si
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
We must regulate the current vector magnitude AND angle by regulating ia ib and ic
Rotor flux axis
N
S
θd
Part A Measure the rotor angle to determine if the net current vector is oriented at 90o with respect to
the rotor flux
This is called the ldquodirectrdquo or ldquodrdquo axis
Usually accomplished with a resolver or encoder
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βiPart B Convert the three phase
current vectors into two orthogonal vectors that will result in the same net current vector In other words convert the 3-phase motor to a 2-phase motor Then we only have two current values
to regulate instead of three
This is often referred to as the FORWARD CLARK TRANSFORMATION
A
B
C
si
aii 23=α
cb iii 23
23 minus=βia(t) ib(t) ic(t) iβ(t)iα(t)
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βi
A
B
C
si
ddq
ddd
iii
iii
θθ
θθ
βα
βα
cossin
sincos
+minus=
+=
4 trig calulations7 multiplications3 additions
Total
θdd axis
q axis
rotor flux axis
i q
i d
Part C Jump up on the rotating reference frame
whose x-axis is the rotor flux axis
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
Part D and are handled independently Since the comparison is performed in the rotating frame motor AC frequency
is not seen Thus they are DC quantities
i d +
-
error(t)
+
-
error(t)
i q
i q (commanded)
(measured)
can however be used to weaken the field of the machinecontrols amount of torque generated by the motor
i di q
i d i q
(commanded)
i d (measured)
Under normal conditions we have all the d-axis flux we need supplied by the permanent magnets in the rotor
So commanded id is set to zero
This is how much torque we want
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
i d
int I
P+ +
+-
error(t)
int I
P+ +
+-
error(t)
(commanded)
i d (measured)
i q
i q (commanded)
(measured)
vd
vq
3 Amplify the error signals to generate correction voltages
The PI regulator is a good choice for current regulation
Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

[ ]qsdr IPTorque λ22
3=
Constant (for now)
How Do You Control Torque on a PMSM
Constant
Adjustable
S
N
S
N
S
N
InterruptMeasure rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
InterruptMeasure new rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
InterruptMeasure new rotor flux angleRegulate current vector to be 90o wrt rotor fluxExit ISR
A
B
C
AB
C
i b
i c
i a
(implied)
Controllerwith AD
i ai bi c
Measure and From Kirkoffrsquos current law calculate
i a i b i c
A B and C axes are ldquofixedrdquo with respect to the motor housing This reference frame is also called the
ldquostationary framerdquo or ldquostator framerdquo
1 Measure current already flowing in the motor
net current vector
ia
ib
ic
Texas Instruments
DaversquosMotor Control
Center
A
B
C
si
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
We must regulate the current vector magnitude AND angle by regulating ia ib and ic
Rotor flux axis
N
S
θd
Part A Measure the rotor angle to determine if the net current vector is oriented at 90o with respect to
the rotor flux
This is called the ldquodirectrdquo or ldquodrdquo axis
Usually accomplished with a resolver or encoder
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βiPart B Convert the three phase
current vectors into two orthogonal vectors that will result in the same net current vector In other words convert the 3-phase motor to a 2-phase motor Then we only have two current values
to regulate instead of three
This is often referred to as the FORWARD CLARK TRANSFORMATION
A
B
C
si
aii 23=α
cb iii 23
23 minus=βia(t) ib(t) ic(t) iβ(t)iα(t)
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βi
A
B
C
si
ddq
ddd
iii
iii
θθ
θθ
βα
βα
cossin
sincos
+minus=
+=
4 trig calulations7 multiplications3 additions
Total
θdd axis
q axis
rotor flux axis
i q
i d
Part C Jump up on the rotating reference frame
whose x-axis is the rotor flux axis
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
Part D and are handled independently Since the comparison is performed in the rotating frame motor AC frequency
is not seen Thus they are DC quantities
i d +
-
error(t)
+
-
error(t)
i q
i q (commanded)
(measured)
can however be used to weaken the field of the machinecontrols amount of torque generated by the motor
i di q
i d i q
(commanded)
i d (measured)
Under normal conditions we have all the d-axis flux we need supplied by the permanent magnets in the rotor
So commanded id is set to zero
This is how much torque we want
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
i d
int I
P+ +
+-
error(t)
int I
P+ +
+-
error(t)
(commanded)
i d (measured)
i q
i q (commanded)
(measured)
vd
vq
3 Amplify the error signals to generate correction voltages
The PI regulator is a good choice for current regulation
Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

A
B
C
AB
C
i b
i c
i a
(implied)
Controllerwith AD
i ai bi c
Measure and From Kirkoffrsquos current law calculate
i a i b i c
A B and C axes are ldquofixedrdquo with respect to the motor housing This reference frame is also called the
ldquostationary framerdquo or ldquostator framerdquo
1 Measure current already flowing in the motor
net current vector
ia
ib
ic
Texas Instruments
DaversquosMotor Control
Center
A
B
C
si
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
We must regulate the current vector magnitude AND angle by regulating ia ib and ic
Rotor flux axis
N
S
θd
Part A Measure the rotor angle to determine if the net current vector is oriented at 90o with respect to
the rotor flux
This is called the ldquodirectrdquo or ldquodrdquo axis
Usually accomplished with a resolver or encoder
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βiPart B Convert the three phase
current vectors into two orthogonal vectors that will result in the same net current vector In other words convert the 3-phase motor to a 2-phase motor Then we only have two current values
to regulate instead of three
This is often referred to as the FORWARD CLARK TRANSFORMATION
A
B
C
si
aii 23=α
cb iii 23
23 minus=βia(t) ib(t) ic(t) iβ(t)iα(t)
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βi
A
B
C
si
ddq
ddd
iii
iii
θθ
θθ
βα
βα
cossin
sincos
+minus=
+=
4 trig calulations7 multiplications3 additions
Total
θdd axis
q axis
rotor flux axis
i q
i d
Part C Jump up on the rotating reference frame
whose x-axis is the rotor flux axis
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
Part D and are handled independently Since the comparison is performed in the rotating frame motor AC frequency
is not seen Thus they are DC quantities
i d +
-
error(t)
+
-
error(t)
i q
i q (commanded)
(measured)
can however be used to weaken the field of the machinecontrols amount of torque generated by the motor
i di q
i d i q
(commanded)
i d (measured)
Under normal conditions we have all the d-axis flux we need supplied by the permanent magnets in the rotor
So commanded id is set to zero
This is how much torque we want
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
i d
int I
P+ +
+-
error(t)
int I
P+ +
+-
error(t)
(commanded)
i d (measured)
i q
i q (commanded)
(measured)
vd
vq
3 Amplify the error signals to generate correction voltages
The PI regulator is a good choice for current regulation
Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

A
B
C
si
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
We must regulate the current vector magnitude AND angle by regulating ia ib and ic
Rotor flux axis
N
S
θd
Part A Measure the rotor angle to determine if the net current vector is oriented at 90o with respect to
the rotor flux
This is called the ldquodirectrdquo or ldquodrdquo axis
Usually accomplished with a resolver or encoder
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βiPart B Convert the three phase
current vectors into two orthogonal vectors that will result in the same net current vector In other words convert the 3-phase motor to a 2-phase motor Then we only have two current values
to regulate instead of three
This is often referred to as the FORWARD CLARK TRANSFORMATION
A
B
C
si
aii 23=α
cb iii 23
23 minus=βia(t) ib(t) ic(t) iβ(t)iα(t)
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βi
A
B
C
si
ddq
ddd
iii
iii
θθ
θθ
βα
βα
cossin
sincos
+minus=
+=
4 trig calulations7 multiplications3 additions
Total
θdd axis
q axis
rotor flux axis
i q
i d
Part C Jump up on the rotating reference frame
whose x-axis is the rotor flux axis
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
Part D and are handled independently Since the comparison is performed in the rotating frame motor AC frequency
is not seen Thus they are DC quantities
i d +
-
error(t)
+
-
error(t)
i q
i q (commanded)
(measured)
can however be used to weaken the field of the machinecontrols amount of torque generated by the motor
i di q
i d i q
(commanded)
i d (measured)
Under normal conditions we have all the d-axis flux we need supplied by the permanent magnets in the rotor
So commanded id is set to zero
This is how much torque we want
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
i d
int I
P+ +
+-
error(t)
int I
P+ +
+-
error(t)
(commanded)
i d (measured)
i q
i q (commanded)
(measured)
vd
vq
3 Amplify the error signals to generate correction voltages
The PI regulator is a good choice for current regulation
Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

N
S
θd
Part A Measure the rotor angle to determine if the net current vector is oriented at 90o with respect to
the rotor flux
This is called the ldquodirectrdquo or ldquodrdquo axis
Usually accomplished with a resolver or encoder
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βiPart B Convert the three phase
current vectors into two orthogonal vectors that will result in the same net current vector In other words convert the 3-phase motor to a 2-phase motor Then we only have two current values
to regulate instead of three
This is often referred to as the FORWARD CLARK TRANSFORMATION
A
B
C
si
aii 23=α
cb iii 23
23 minus=βia(t) ib(t) ic(t) iβ(t)iα(t)
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βi
A
B
C
si
ddq
ddd
iii
iii
θθ
θθ
βα
βα
cossin
sincos
+minus=
+=
4 trig calulations7 multiplications3 additions
Total
θdd axis
q axis
rotor flux axis
i q
i d
Part C Jump up on the rotating reference frame
whose x-axis is the rotor flux axis
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
Part D and are handled independently Since the comparison is performed in the rotating frame motor AC frequency
is not seen Thus they are DC quantities
i d +
-
error(t)
+
-
error(t)
i q
i q (commanded)
(measured)
can however be used to weaken the field of the machinecontrols amount of torque generated by the motor
i di q
i d i q
(commanded)
i d (measured)
Under normal conditions we have all the d-axis flux we need supplied by the permanent magnets in the rotor
So commanded id is set to zero
This is how much torque we want
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
i d
int I
P+ +
+-
error(t)
int I
P+ +
+-
error(t)
(commanded)
i d (measured)
i q
i q (commanded)
(measured)
vd
vq
3 Amplify the error signals to generate correction voltages
The PI regulator is a good choice for current regulation
Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

αi
βiPart B Convert the three phase
current vectors into two orthogonal vectors that will result in the same net current vector In other words convert the 3-phase motor to a 2-phase motor Then we only have two current values
to regulate instead of three
This is often referred to as the FORWARD CLARK TRANSFORMATION
A
B
C
si
aii 23=α
cb iii 23
23 minus=βia(t) ib(t) ic(t) iβ(t)iα(t)
i b
i c
i a
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
αi
βi
A
B
C
si
ddq
ddd
iii
iii
θθ
θθ
βα
βα
cossin
sincos
+minus=
+=
4 trig calulations7 multiplications3 additions
Total
θdd axis
q axis
rotor flux axis
i q
i d
Part C Jump up on the rotating reference frame
whose x-axis is the rotor flux axis
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
Part D and are handled independently Since the comparison is performed in the rotating frame motor AC frequency
is not seen Thus they are DC quantities
i d +
-
error(t)
+
-
error(t)
i q
i q (commanded)
(measured)
can however be used to weaken the field of the machinecontrols amount of torque generated by the motor
i di q
i d i q
(commanded)
i d (measured)
Under normal conditions we have all the d-axis flux we need supplied by the permanent magnets in the rotor
So commanded id is set to zero
This is how much torque we want
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
i d
int I
P+ +
+-
error(t)
int I
P+ +
+-
error(t)
(commanded)
i d (measured)
i q
i q (commanded)
(measured)
vd
vq
3 Amplify the error signals to generate correction voltages
The PI regulator is a good choice for current regulation
Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

αi
βi
A
B
C
si
ddq
ddd
iii
iii
θθ
θθ
βα
βα
cossin
sincos
+minus=
+=
4 trig calulations7 multiplications3 additions
Total
θdd axis
q axis
rotor flux axis
i q
i d
Part C Jump up on the rotating reference frame
whose x-axis is the rotor flux axis
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
Part D and are handled independently Since the comparison is performed in the rotating frame motor AC frequency
is not seen Thus they are DC quantities
i d +
-
error(t)
+
-
error(t)
i q
i q (commanded)
(measured)
can however be used to weaken the field of the machinecontrols amount of torque generated by the motor
i di q
i d i q
(commanded)
i d (measured)
Under normal conditions we have all the d-axis flux we need supplied by the permanent magnets in the rotor
So commanded id is set to zero
This is how much torque we want
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
i d
int I
P+ +
+-
error(t)
int I
P+ +
+-
error(t)
(commanded)
i d (measured)
i q
i q (commanded)
(measured)
vd
vq
3 Amplify the error signals to generate correction voltages
The PI regulator is a good choice for current regulation
Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Part D and are handled independently Since the comparison is performed in the rotating frame motor AC frequency
is not seen Thus they are DC quantities
i d +
-
error(t)
+
-
error(t)
i q
i q (commanded)
(measured)
can however be used to weaken the field of the machinecontrols amount of torque generated by the motor
i di q
i d i q
(commanded)
i d (measured)
Under normal conditions we have all the d-axis flux we need supplied by the permanent magnets in the rotor
So commanded id is set to zero
This is how much torque we want
2 Compare the measured current (vector) with the desired current (vector) and generate error signals
i d
int I
P+ +
+-
error(t)
int I
P+ +
+-
error(t)
(commanded)
i d (measured)
i q
i q (commanded)
(measured)
vd
vq
3 Amplify the error signals to generate correction voltages
The PI regulator is a good choice for current regulation
Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

i d
int I
P+ +
+-
error(t)
int I
P+ +
+-
error(t)
(commanded)
i d (measured)
i q
i q (commanded)
(measured)
vd
vq
3 Amplify the error signals to generate correction voltages
The PI regulator is a good choice for current regulation
Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Voltage vector
αv
βv
Part A Transfer the voltage vectors back on to the stationary rectangular coordinate system
dqdd
dqdd
vvv
vvv
θθ
θθ
β
α
cossin
sincos
+=
minus=
d axis
q axis
θd
A
B
C
vd
vq
rotor flux axis
4 Modulate the correction voltages onto the motor terminals
We now need to ldquojump offrdquoof the rotating reference
frame
vd (t)
vq(t)
vα (t) vβ (t)
αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

αv
βv
A
B
C
v a
v c
v b
βα
βα
α
vvv
vvvvv
c
b
a
31
31
31
31
32
minusminus=
+minus=
=
Part B Next we transform the voltage vectors from the
rectangular coordinate system to three phase vectors
va(t) vb(t) vc(t)vα (t) vβ (t)
Reverse Clark Transformation
4 Modulate the correction voltages onto the motor terminals
Voltage Vector
Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Phase A - top
Phase B - top
Phase B - bottom
Phase C - top
Phase C - bottom
Phase A - bottom
4 Modulate the correction voltages onto the motor terminals
Over time under steady-state conditions the correction voltagesva vb and vc will be sine waves phase shifted by 120o
AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

AC InAC to DCConverter
ThreePhase
Inverter
GateDrivers
DC Bus
GateDriver
PowerSupplies
AnalogConditioning
SerialInterfaceF2803x
12 BitADC
Trig
ger Fa
ult
ePWMModule
Sync
Isolation
eQEPModule
CommandedSpeed
Actual Speed
+-
PIController
FieldOriented
ControllerCommanded iq
Commanded id
PhaseCurrent
Reconstructionicia
SpaceVector
Modulation
Vα
Vβ
ibusBus
Over-Voltage
GPIO or PWM
SpeedCalculation
ibVbus
Mot
or P
WM
s
Ove
rcur
rent
Bus
Cur
rent
Bus
Vol
tage
Processor Ground
θ(t)
θ(t)
θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

θθ
Torque
TransmissionController
CAN
Vehi
cle
Spee
d
PowerInverter
PWMs
CurrentFeedback
Motor θ feedback
Encoder IF
torque assist
To steering rack
Essentiallya torque amplifier
PMSM
3
Texas Instruments
DaversquosMotor Control
Center
FOC in Electric Power Steering
resolver
MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

MathematicalModel of Process
Σ+
-
Measurement
Estimate
Error feedback
Process Σ
Noise
Model Based Filtering
( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

( ) ( ) ( ) ( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛ minus+minusΔ=Δ
⎟⎠⎞
⎜⎝⎛ minus+Δ+=+
and
andandandand
nynynyny
nynynynyny
β
α
)1(ˆ)(ˆ
1
Better tracking is obtained when α and β are highBetter filtering is obtained when α and β are low
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
( )1+and
ny
( )nyand
( )ny
( )nyand
Δ
y correctionΔy correction ( )nerror
Integrator Integrator
+
^ ^
Tracking Filters
Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Delay Delay
Delay
+
+ +
X(n)
X(n-1)
Y(n+1)
Y(n)
Y(n-1)
Accumulator
+
αminus1
2minusαminusβ
α+β
minusα
The tracking filter is revealed to be a simple 2nd order IIR filter as shown below
The Tracking FilterhellipUnmasked
Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Σ
Σ Σ Σ
Z-1 Z-1
αβ
+
-
++
+ ++
Integrator Integrator
+
MeasuredPosition
EstimatedPosition
EstimatedVelocity
EstimatedAcceleration
Error
This form of the filter reveals the state variables of the system
State Variable Representation
Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Observers literally recreate the desired signal mathematically (great noise decoupling)The ldquoguessrdquo is corrected by comparison with an observable signal
Observers are used to ldquoobserverdquo a quantity which is difficult to measureby mathematically modeling the system
Model of H(z)
Integrator Integrator
αβ
Source Motion Controller Employs DSP TechnologyRobert van der Kruk and John Scannell
Phillips Centre for Manufacturing TechnologyPCIM ndash September 1988
By providing an additional feedforward input the tracking filter can make better output estimates It then takes the form of an OBSERVER
Can be designed to have zero (or near
zero) estimation lag
Parameter Estimation with Observers
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed) V(encoder_speed)
V(counts)
0ms 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms 180ms 200ms-15V
-12V
-9V
-6V
-3V
0V
3V
6V
9V
12V
15V
18V-20V
0V
20V
40V
60V
80V
100V
120V
140V
160V
180V
200V
220V00KV
02KV
04KV
06KV
08KV
10KV
12KV
14KV
16KV
18KV
20KV
22KV
V(i_sampled)
V(speed^)
V(counts)
Servo Performance with Velocity Directly from Encoder vs Observer
Position
Velocity
Current
Velocity from EncoderVelocity from Observer
Velocity from EncoderVelocity from Observer
Actual Velocity
Velocity from EncoderVelocity from Observer
One revolution = 2000 encoder counts
06 NM Load Torque Disturbance
sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

sR lsL mL
synEk ω
stator voltage
sL
( )( ) ⎥⎦
⎤⎢⎣
⎡minussdot+⎥
⎦
⎤⎢⎣
⎡sdot+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esynEss k
ii
pLii
Rvv
θθ
ωβ
α
β
α
β
α
cossin
Assuming no saliency stationary frame equations are
Rotor with surface-mount magnetsNon-salient design (magnetically round))
Back EMF component
Sensorless Sinusoidal PMSM Control
+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

+
-
Vin
emf
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer
Stationary Frame Back EMF Observer
sRVin
sL i
emf
+
-
Vin
emf
1Rs
LowPassFilter
i
emf
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛minus⎟⎟⎠
⎞⎜⎜⎝⎛ minus=
minusτt
s
in eRtemftVti 1
Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Back-EMF Observer Performance
0ms 5ms 10ms 15ms 20ms 25ms-120V
-100V
-80V
-60V
-40V
-20V
0V
20V
40V
60V
80V
100V
120VV(bemf) V(voltage_input)
0 25ms
sR sL i
emf
0416Ω
Observer simulationObserver sampling frequency = 10 KHz
-120 V
120 V
120 VAC60 Hz
1365 mH
One of three phases of Baldor PMSM motor
Back-EMFEstimated Back-EMF
+
-
Vin
LowPassFilter
+
-
i
i1
Rs^
PI -1
Back EMF Observer EMF estimate
-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

-1Σ
PMSM Motor(2-phase representation)
αv
βv
ss RsL +1
+-
+
-
Σss RsL +
1+
-+
-
P I
Back EMF α
Back EMF β
( )θsinKminus
( )θcosK
Σs1
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
Σ
Σ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
minus=ss sLR
emfvi 1)( βαβαβα
αi βi
0
0
Stationary Frame State Observer for a Non-Salient Machine
-1P I
Texas Instruments
DaversquosMotor Control
Center
Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Dual Motor Control with One Piccolo
AC Input
ACDC conversion (with PFC)
3 PhaseMotor Driver
3 PhaseMotor Driver
System Communication
F2802x
Dual Sensorless FOC with Sliding Mode ObserversDual Sensorless FOC with Sliding Mode Observers
Digital PFC implemented in the CLADigital PFC implemented in the CLA
Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Axis of rotor flux is fixed with respect to the rotor ie it is ldquosynchronousrdquo
Source Electric Machinery by A E Fitzgerald Charles Kingsley Jr and Stephen D Umans McGraw-Hill 1990
( )[ ]qsdsqsdsqsdr IILLIPTorque minus+= λ22
3
Reaction TorqueReluctance Torque
Permanent Magnet Rotor
N
S
hellipbut what about SALIENT Machines
Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Effect of Saliency on Optimum Torque Angle
New angle for optimum torque
( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

( )( ) ( )( ) ( )
( ) ⎥⎦⎤
⎢⎣
⎡minussdot+primeminusminus+⎥
⎦
⎤⎢⎣
⎡sdot⎥⎦
⎤⎢⎣
⎡sdotminusminus
sdotminus+⎥
⎦
⎤⎢⎣
⎡sdot=⎥
⎦
⎤⎢⎣
⎡
e
esyneqdsynqd
dsynqd
synqdds kiiLL
ii
pLLLLLpL
ii
Rvv
θθ
ωωω
ω
β
α
β
α
β
α
cossin
sR dL
)sin( eK θminus ExtendedEMF α
voltagedtdcauses
dtdwithcombinedwhenwhich
ddcauses
ddL
=λθ
θλ
θ
Rotor with buried interior magnets(salient design)
+-
αvαi ( ) βω iLL synqd sdotminus
sR dL
)cos( eK θ ExtendedEMF α
+-
βvβi ( ) αω iLL synqd sdotminus
Salient PMAC Machine
-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

-1
-1
Σs1
P I Σ
2-phase PMAC Motor
αv
βv
+-
+
( ) ωβiLL qd minus
P I Σ+
-
+
-
+
Back EMF α
Back EMF β
X
-
+
s1K 1Σ
X
K 2
L P F
( )nand
θ
( )nand
ω
cos
sin
ss RsL +1
ss RsL +1
Σ
αi βi
Σ-
( ) ωαiLL qd minus
-
Stationary Frame State Observer for a Salient Machine
( )θsinKminus
( )θcosK
Texas Instruments
DaversquosMotor Control
Center
Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Perf
orm
ance
Broad C2000 32-bit MCU Portfolio for All Application Needs
Next Gen
F281xbull 150 MIPSbull 128-256 KB Flashbull 16 PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 128-QFP 176-QFP
179-BGA F280xbull 60-100 MIPSbull 32-256 KB Flashbull 16 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 100-QFP 100-BGA
F2823xbull 150 MIPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179- BGA
F2833xbull 150 MIPS300MFLOPSbull 196-512 KB Flashbull 18 PWMs 6 HR PWMsbull 16-ch 12-bit ADCbull CAP QEPbull 176-QFP 176-179-BGA
Delfino (Floating Point) Series
F2803xbull 60 MIPS + CLAbull 64-128 KB Flashbull 14 PWMs 7 HR PWMsbull 16-ch 12-bit ADCbull CAP QEP COMP OSCbull Single 33V Supplybull 64-QFP 80-QFP
F2802xbull 40-60 MIPSbull 16-64 KB Flash bull 8 PWMs 4 HR PWMsbull 13-ch 12-bit ADCbull CAP COMP OSCbull Single 33V Supplybull 38-TSSOP 48-QFP
PiccoloTM Series
Next Gen
Code compatible solutions scaling from 40MHz to 300MHz
C2834xbull 300 MIPS600 MFLOPSbull 196-516 KB SRAMbull 18 PWMs 6 HR PWMsbull CAP QEPbull 256-BGA 179-BGA
F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

F2802x (Piccolo) Series
Key New Featuresbull 4060 MHz bull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 2 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 38-pin TSSOP or 48-pin TQFP
F2802x (Piccolo) Series
12 bit5 MSPS
Dual SHAuto Seq
ADC
A0VREFHIA1A2A3A4
A6A7
B1B2B3B4
B6B7
AnalogComparators
CMP1-Out
DAC10 bit
CMP2-Out
VSSAFlash
16-64 KB
C28 Core32 bit ndash 4060MHz PWM1 AB
CommsSCI
SPI
I2C
PWM2 AB
PWM3 AB
PWM4 AB
TripZonelogic
PWM-1APWM-1B
Int-Osc-1
VregPWR
GND
POR BOR
2
Int-Osc-2
6
DAC10 bit
Ext-Osc-2
3
CAP
Timer-0
Timers - 32bit
Timer-1Timer-2
GPIO Control
2
4
2
X1X2
PLL
WD
PWM-2APWM-2BPWM-3APWM-3BPWM-4APWM-4B
TZ1TZ2TZ3CMP1-outCMP2-out
ECAP
Vref
RAM 4-12 KB
TempSensor
System
F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

F2803x (Piccolo with CLA) Series
Key New Featuresbull 60 MHz CPUbull New acceleration unit (CLA)bull CLA has 32bit floating Pt precisionbull Single 33V supplybull 12-bit ratio-metric ADCbull Low latency ADC trigger amp seqbull 3 Analog comparators lt 30nSbull 10 bit DAC reference lt 2uS settlingbull 150ps PWM resolution Duty amp Freqbull Dual ldquozero-pinrdquo on-chip oscillatorsbull 64-pin or 80-pin TQFP
32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

32-bit CLA 60MHz
Data0RAM
2KByte
ProgRAM
8KByte
Data1RAM
2KByteSecure
MsgRAM
256Byte
InterruptSleep
32-bit C28-CPU60MHz
DAC3 x
Comp3 xComp
DAC
3 x Comp
F2803x PiccoloTM Device With CLA
GPIO
Mux
SCIFLASH64128KByte
48 sectors
Per
Bus
3xDAC10-bit
M0M1RAM
4KByte
EPWM1 HRPWM
Per
Bus
SPI
I2CCAN
EPWM2 HRPWM
ECAP
EQEP
OTP 2KByte
Secure
BootROM
32b32b 32b
OSC110MHz
LIN (SCI)
OSC210MHz
PLLWDLPM
mux
EXTXTAL
GPIOMUXXCLKIN
EPWM3 HRPWM
EPWM4 HRPWM
GPIO0
GPIOx
Ax
X1X2
+
-
Interrupt
2 SPI
EPWM5 HRPWM
EPWM6
EPWM7
PORBOR XRSnVSS
VREGENZVDD (core voltage)VDDIO
Digital Power VREG
33V +-10
VDDAVSSA
Analog Power33V +-10
ADC12-bit2 SH
46MSPS
AIO
Mux
Per BusBx
L0RAM
4KByte
3 External InterruptsJTAG
HRPWM
HRPWM
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom
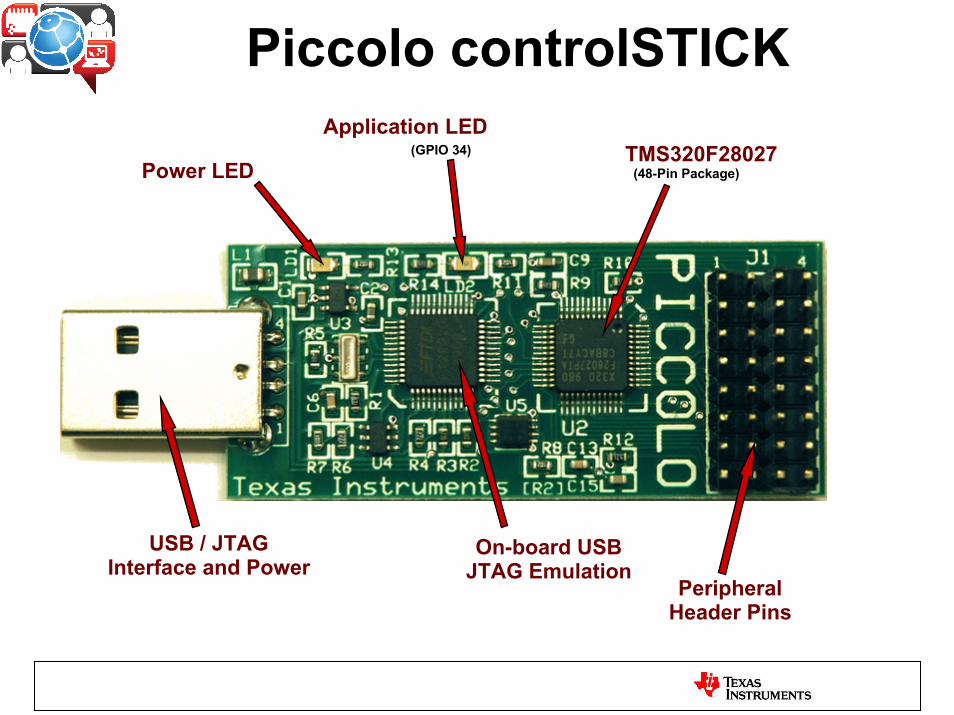
Piccolo controlSTICK
Power LED
Application LEDTMS320F28027
USB JTAGInterface and Power
On-board USBJTAG Emulation
PeripheralHeader Pins
(GPIO 34)
(48-Pin Package)
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom
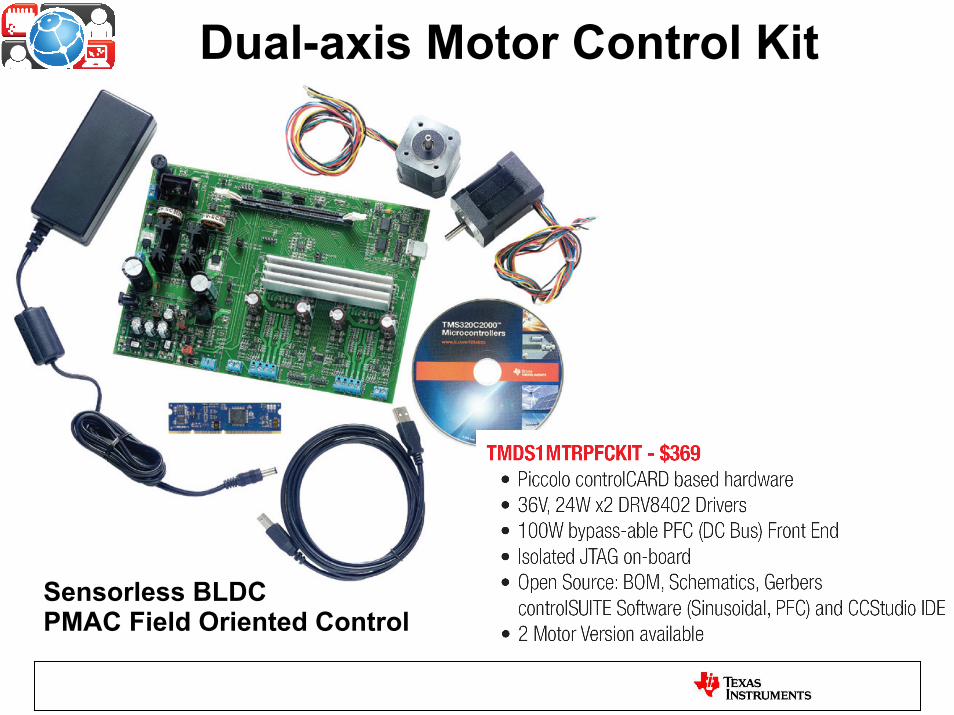
Sensorless BLDCPMAC Field Oriented Control
Dual-axis Motor Control Kit
High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

High Voltage Motor Control Kit
Sensorless BLDCPMAC Field Oriented ControlAC Induction
Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Stellaris LM3S818
Scalar Control Only
AC Induction Motor Control
Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

Project ManagerSource amp object filesFile dependenciesCompiler Assembler ampLinker build options
Full CC++ amp Assembly Debugging
C amp ASM SourceMixed modeDisassembly (patch)Set Break PointsSet Probe Points
EditorStructure Expansion
Help CPU Window
Memory WindowGraph Window
Status Window
Watch Window
Menus or Icons
Code Composer Studio
C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

C2000 Signal Processing LibrariesSignal Processing Libraries amp Applications Software Literature ACI3-1 Control with Constant VHz SPRC194ACI3-3 Sensored Indirect Flux Vector Control SPRC207ACI3-3 Sensored Indirect Flux Vector Control (simulation) SPRC208ACI3-4 Sensorless Direct Flux Vector Control SPRC195ACI3-4 Sensorless Direct Flux Vector Control (simulation) SPRC209PMSM3-1 Sensored Field Oriented Control using QEP SPRC210PMSM3-2 Sensorless Field Oriented Control SPRC197PMSM3-3 Sensored Field Oriented Control using Resolver SPRC211PMSM3-4 Sensored Position Control using QEP SPRC212BLDC3-1 Sensored Trapezoidal Control using Hall Sensors SPRC213BLDC3-2 Sensorless Trapezoidal Drive SPRC196DCMOTOR Speed amp Position Control using QEP without Index SPRC214Digital Motor Control Library (FC280x) SPRC215Communications Driver Library SPRC183DSP Fast Fourier Transform (FFT) Library SPRC081DSP Filter Library SPRC082DSP Fixed-Point Math Library SPRC085DSP IQ Math Library SPRC087DSP Signal Generator Library SPRC083DSP Software Test Bench (STB) Library SPRC084C28x FPU Fast RTS Library SPRC664DSP2803x CC++ Header Files and Peripheral Examples SPRC892
Available from TI Website rArr httpwwwticomc2000
C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom

C2000 Modeling amp Code Generation
bull Link for Code Composer Studiobull Real Time Workshop Embedded Coderbull Target for TI C2000
Compileamp Link
CASMCodeTexas Instruments
Code Composer Studiotrade
Environment
Download
Debug
TI C2000DSC
MathWorks Modeling Environment
MATLABreg Simulinkreg Stateflowreg
The Mathworks Support for C2000
VisSimEmbedded Controls Developer Model Based Development for TI C2000
wwwvissimcom