Embed Size (px)
Citation preview

DESIGN AND IMPLEMENTATION OF FLEXIBLE
MANUFACTURING CELL FOR THE INSPECTION OF
CERAMIC WALL PLATESThesis submitted as partial fulfilment for MSc. degree in design and production
engineering
Ain Shams University M.U.S.T
SupervisorsProf. Farid A. Tolbah
Dr. Ahmed M. Aly
Waleed A. El-BadryT.A, Mechatronics Department,
College of Engineering, M.U.S.T

The available inspection method for quality of shapes of
drawn objects in ceramic wall plates is carried out manually.
Geometry and colours are inspected automatically in the
image as a whole irrespective of its location.
Current Inspection systems is restricted to detection of cracks
and colours only and ignores quality of shapes.
2
Manufacturing ceramic wall plates in industry is witnessing a
large growth trend, therefore a need to perform fully
automated inspection system became mandatory.

Applying an appropriate methodology for the quality
inspection of drawn shapes in ceramic plates using modified
fuzzy c-mean and fuzzy logic. Thereafter, implementing such
a methodology in a machine vision system.
Developing an automated system for inspection of ceramic
sorting system with respect to color matching and quality of
shapes
3

Eye Fatigue
accuracy of repeated measurements
lack of mass production
Since early 90s , automatic inspection played a key
rule in manufacturing . As quality may degrade with
visual inspection due to several aspect:
4

5

6
Computer Vision
ImageManipulation
ImagePresentation
ImageCompression
Storing Images

7
Source Of Illumination
Camera
Interfacing Circuitry for
Manipulators
Software Program
Mechanical Handling System
Image Processing
Machine Vision
Mechatronics

Literature Survey
Many researches in this field were not
published due to concession of production companies.
Previous research contributions were focusing on dealing with ceramic plate “as a whole” irrespective of the painted geometry of each sculpted object.
8

9
Tile Vs. Garnished Plates
Ceramic Tile
Garnished Plate

10

11
Image
Acquisition
Gamma
Correction
Image
Calibration
Soft
PartitioningColour
Grouping
Geometric
Features
Tuning Fuzzy
Logic RulesGeneral Block Diagram

12
Image Acquisition• For calibration and inspection as well.
• Acquisition speed of 60 fps with 400 MB/S (Demanded in ceramic inspection).
CCD Firewire Colour Camera
640 X 480 resolutionIEEE 1394 Frame-grabber
Image Acquisition
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules

13
Gamma Correctionor often simply gamma, is the name of a nonlinear operation used to code and
decode luminance in video or still images systems. This phenomena results
from the output displays. Images which are not properly corrected can look
either bleached out, or too dark
Before After
Image Acquisition
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules

14
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules
NEED FOR CALIBRATION ?
Camera holds a fixed number of pixels
The more pixels you use to map a feature, the better accuracy you get
Better Accuracy→ Closer Lens

15
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules
DISCTORTION METRICS

16
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules
Distorted Calibrated
NEED FOR CALIBRATION ?

17
Proposed Novel Algorithm For Correcting
and Calibrating Lens Distortion
Template
Acquisitio
n
Colour
Plane
Extraction
Automatic
Thresholdin
g
Particle
Groupin
g
Particle
Measuremen
ts
Displayin
g
corrected
image
Distance
Measuremen
ts
Mapping
particles to its
expected
place
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules
• An Image of calibration grid is acquired.
• Red colour plane is extracted.

18
Proposed Novel Algorithm For Correcting
and Calibrating Lens Distortion
Template
Acquisitio
n
Colour
Plane
Extraction
Automatic
Thresholdin
g
Particle
Groupin
g
Particle
Measuremen
ts
Displayin
g
corrected
image
Distance
Measuremen
ts
Mapping
particles to its
expected
place
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules
• Adaptive thresholding via clustering
method.
• Suitable in variable illumination over
surface.

19
Proposed Novel Algorithm For Correcting
and Calibrating Lens Distortion
Template
Acquisitio
n
Colour
Plane
Extraction
Automatic
Thresholdin
g
Particle
Groupin
g
Particle
Measuremen
ts
Displayin
g
corrected
image
Distance
Measuremen
ts
Mapping
particles to its
expected
place
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules
• Tracing boundaries (checking neighbored pixels)
• Excluding open traces (incomplete circles)

20
Proposed Novel Algorithm For Correcting
and Calibrating Lens Distortion
Template
Acquisitio
n
Colour
Plane
Extraction
Automatic
Thresholdin
g
Particle
Groupin
g
Particle
Measuremen
ts
Displayin
g
corrected
image
Distance
Measuremen
ts
Mapping
particles to its
expected
place
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules

21
Proposed Novel Algorithm For Correcting
and Calibrating Lens Distortion
Template
Acquisitio
n
Colour
Plane
Extraction
Automatic
Thresholdin
g
Particle
Groupin
g
Particle
Measuremen
ts
Displayin
g
corrected
image
Distance
Measuremen
ts
Mapping
particles to its
expected
place
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules
• Correcting skewness (circle center, distance from
neighbors)
• Creating lookup table for correcting incoming images.

22
Distorted Image Corrected Image
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules

23
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules

24
Soft Partitioning and grouping
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules

25
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules

26
Angle measured from
reference axis
Features to be extracted from
each pattern
Features Vector for
Pattern Matching
Lines Arcs Angle
Geometry Orientation
Pixel RGB
Colour Space
ØI
wI
HIRGB
(Ri,Gi,Bi)
Geometric Feature
Extraction
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules

Captured Imageafter calibration
Edge DetectionPrewitt Filter
Feature Extraction1- Corner Detection
2- Rake for Edge Measurement
3- Geometry Extraction
Geometric Feature Extraction
27
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules
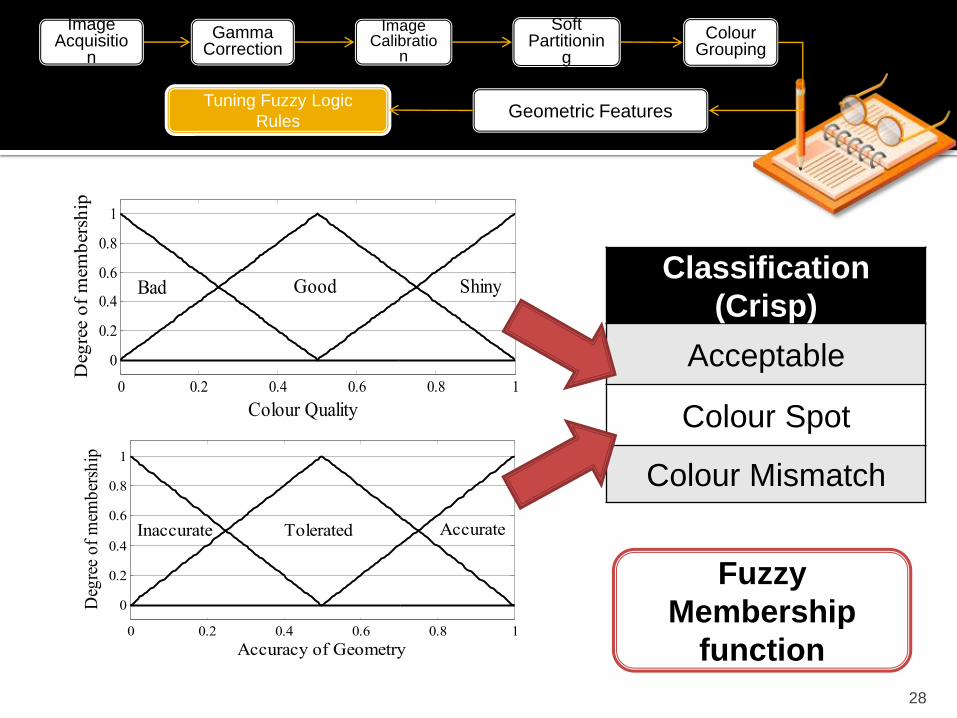
Classification
(Crisp)
Acceptable
Colour Spot
Colour Mismatch
28
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
Colour Quality
Deg
ree
of
mem
ber
ship
Bad Good Shiny
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
Accuracy of Geometry
Deg
ree
of
mem
ber
ship
Inaccurate Tolerated Accurate
Fuzzy
Membership
function
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules

29
Fuzzy Rules
Accuracy of Geometry
Inaccurate Tolerated Accurate
Quality
of Colour
Bad Colour Spot Colour Mismatch
Colour mismatch
Good Colour Spot Colour Spot Acceptable
Shiny Colour Spot Acceptable Acceptable
Image Acquisitio
n
Gamma Correction
Image Calibratio
n
Soft Partitionin
g
ColourGrouping
Geometric FeaturesTuning Fuzzy Logic
Rules

30
31
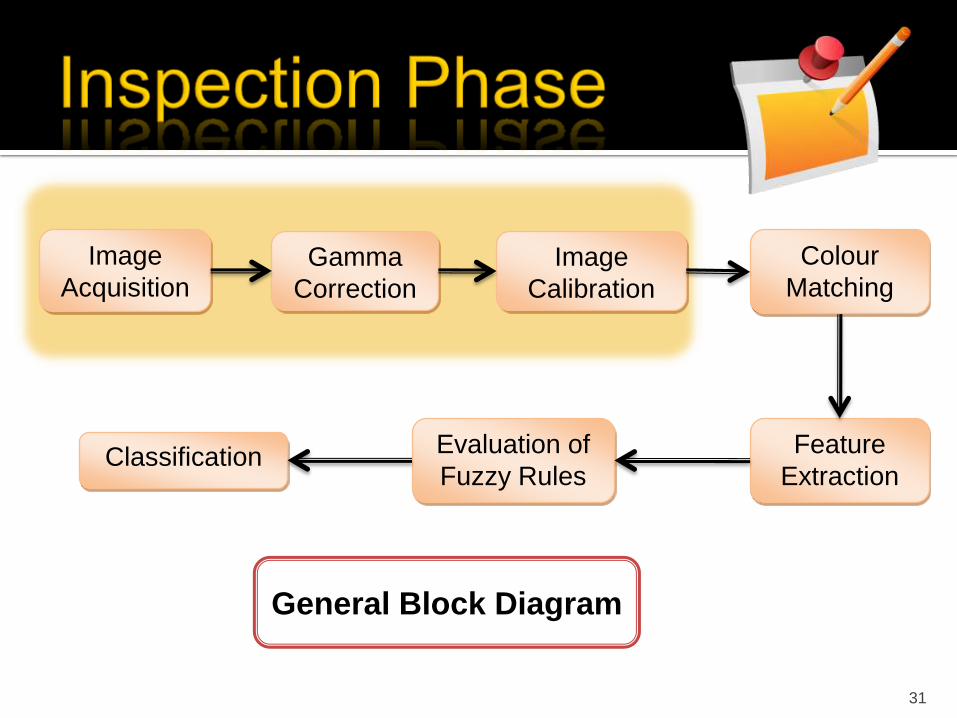
General Block Diagram
Image
AcquisitionGamma
Correction
Image
Calibration
Feature
Extraction
Evaluation of
Fuzzy RulesClassification
Colour
Matching

32

33
Mechanical DesignFor the generic FMC

34
Stations for Classification
InspectionZone

35
Flexible arms

36
Microcontroller
USB Enabled Chip
EEPROM(USB Enumeration)S
chem
atic
Dia
gra
m

37
Lay
ou
t

38
Software Architecture
MATLAB for .NET Builder
Fuzzy Logic Fuzzy C-Mean
Visual Basic.NET
Image Processing and
CalibrationUser Interface

39

40

I- Colour Spot II- Colour Mismatch III- Rotated
Fig. No.Colour Quality
Accuracy of Geometry
Acceptable Colour Mismatch Colour Spot
I 0.61 0.68 0.29 0.0 0.5
II 0.12 0.8 0.15 0.46 0.1
III 0.92 0.85 0.59 0.0 0.05
41

Type Automatic Detection
Acceptable 95.3 %
Colour Spot 97.3%
Colour Mismatch 100 %
Total Accuracy 97.5 %
0 50 100 150 200 250 30050
60
70
80
90
Drawn Objects Orientation (in degrees)
Co
rerc
ted
Det
ecti
on
Defects Detection Rate
Effect of Object Orientation on
Defects detection
42

43
0
20
40
60
80
100
120
Colour spots Colour Mismatch Geometry
1
2
1Ovidiu Ghita, Tim Carew and Paul Whelan, A vision-based system for
inspecting painted slates, Journal of Sensor Review, Vol. 26, No.2, 2006
2Proposed Algorithm

44
Fuzzy C-Means
Correct Match(94%)
Incorrect Match(6%)
Nearest Neighbour
Correct Match(67%)
Incorrect Match(33%)

45
Criteria Time (ms)
Image acquisition 16.67
Gamma correction 23
Image calibration 86
Prewitt filter 15
Geometric feature extraction 120
Fuzzy clustering 15 Sec
Color Matching 80
Evaluation of fuzzy rules 69
Criteria Specification
USB actual transfer speed 1MB / S
Inspection Area 20 X 10 cm2

46

47
A new visualization approach for colour grouping was also proposed using fuzzy c-mean clustering technique.
A proposed calibration algorithm was to correct the lens distortion by means of software.
A fuzzy inference engine was built to classify the garnished ceramic plates into three common categories (acceptable, ceramic plate having colour spots, and ceramic plate having colour mismatched drawn objects)

48
The system shows promising results in terms of accuracy in correct classification and withstanding against variability in illumination distribution.
A test rig was developed to emulate the production environment.
The system is considered novel compared to other published work since it is the only work which considered geometric features of drawn objects up to the time of submitting this thesis.

49
[1] A. M. Aly and W. A. El-Badry, "Design and Implementation of Flexible Manufacturing Cell for Quality Inspection of Garnished Ceramic Wall Plates" in 19th
Conference of French Congress of Mechanics Marseille, France, 2009.
[2] F. A. Tolbah, A. M. Aly, and W. A. El-Badry, "Automated grading system for garnished wall plates: A mechatronic approach" presented at the 8th International Conference on Production Engineering and Design for Development, Cairo, Egypt, 2010.
[3] F. A. Tolba, A. M. Aly, and W. A. El-Badry, "An Enhanced Vision System for Sorting Ceramic Plates Based on Hybrid Algorithm and USB Interfacing Circuitry" presented at the 27th National Radio Science Conference, Menoufia, Egypt, 2010.

50
Supervisors
FAMILY
COLLEAGUES
MY BEST FRIEND
REFEREES

51





























