- 1. Chapter 8 Rotational Motion
2. Units of Chapter 8
- Constant Angular Acceleration
- Rolling Motion (Without Slipping)
- Rotational Dynamics; Torque and Rotational Inertia
- Solving Problems in Rotational Dynamics
- Rotational Kinetic Energy
- Angular Momentum and Its Conservation
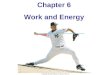
3. 8-1 Angular Quantities In purelyrotationalmotion, all points
on the object move incirclesaround theaxisof rotation ( O ).
Theradiusof the circle isr . All points on a straight line drawn
through the axis move through the sameanglein the sametime .When P
(at radius r) travels an arc length , OP sweeps out an angle .
Angular Displacement of the body 4. 8-1 Angular Quantities
- Commonly, measurein degrees.
- Mathof rotation: Easier ifis measured inRadians
- when thearc length = radius
-
- = ratio of 2 lengths ( dimensionless )
-
- MUSTbe in radians for this to be valid!
In doing problems in this chapter,need calculators inRADIAN
MODE!!!! 5.
- in Radiansfor a circle of radiusr , arc lengthis defined as: (
/r)
- Conversionbetween radians & degrees:
- for afull circle =360=( /r)radians
- Arc length for afull circle =2 r
- for afull circle =360=2 radians
- Or1 radian (rad) =(360/2 )57.3
- Or1 = (2 /360) rad0.017 rad
-
- In doing problems in this chapter, put yourcalculators inRADIAN
MODE!!!!
8-1 Angular Quantities 6. 3 10 -4rad = ? r = 100 m,= ? a)= (3 10
-4rad) [(360/2 )/rad] = 0.017 For small angles:The chordarc length
b)= r = (100)(3 10 -4 ) = 0.03 m = 3 cm MUSTbe in radians in partb
Example 8-2 : 7. 8-1 Angular Quantities Angulardisplacement: The
average angularvelocityis defined as the total
angulardisplacementdivided bytime : Theinstantaneousangular
velocity: (8-2a) (8-2b) (Units =rad/s ), ValidONLYif is inrad ! 8.
8-1 Angular Quantities The angularaccelerationis the rate at which
the angular velocity changes with time:
Theinstantaneousacceleration: (8-3a) (8-3b) (Units =rad/s 2 )
ValidONLY if is inrad & is inrad/s ! 9.
- From Ch. 5 (circular motion): A mass moving in a circle has a
linear velocityv& a linear accelerationa .
- Weve just seen that it also has an angular velocity and an
angular acceleration.
- Every point on a rotating
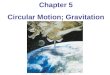
10. Connection Between Angular & Linear Quantities v = ( /
t), = r v = r( / t) = r Radians! v = r Depends on r ( is the same
for all points!) v A= r A A v B= r B B v B> v Asince r B> r A
Therefore, objectsfartherfrom the axis of rotation will movefaster
. 11. 8-1 Angular Quantities If the angular velocity of a rotating
objectchanges , it has atangentialacceleration: a tan= ( v/ t), v
=r = r ( / t) a tan= r Even if the angular velocity is constant,
each point on the object has acentripetalacceleration: 12. 8-1
Angular Quantities Here is
thecorrespondencebetweenlinearandrotationalquantities: 13. 8-1
Angular Quantities Thefrequencyis the number of
completerevolutionsper second: or= 2 f (angular frequency)
Frequencies are measured inhertz .Theperiodis the time one
revolution takes: 14. 8-2 Constant Angular Acceleration The
equations of motion forconstantangular acceleration are the same as
those forlinearmotion, with the substitution of
theangularquantities for thelinearones. NOTE: These areONLY VALIDif
all angular quantities are in radian units!! 15. 8-3 Rolling Motion
(Without Slipping) In (a), a wheel isrollingwithout slipping. The
point P, touching the ground, is instantaneously atrest , and the
center moves with velocity v. In (b) the same wheel is seen from
areference framewhere C is at rest. Now point P is moving with
velocity v. Thelinear speedof the wheel is related to itsangular
speed : 16. Example 8-7
- Bicycle:v 0= 8.4 m/s . Comes to rest after115 m . Diameter of
wheel = 0.68 m ( r = 0.34m )
- a) 0=( v 0 /r)= 24.7 rad/s
c)= ( 2 0 2)/(2 )Stopped = 0 = -0.902 rad/s 2 d)t = ( 0 )/
Stopped = 0 t = 27.4 s 17. 8-4 Torque To make an
objectstartrotating, aforceis needed; thepositionanddirectionof the
force matter as well. Theperpendiculardistance from the axis of
rotation to the line along which the force acts is called thelever
arm . 18. 8-4 Torque Alongerlever arm is very helpful in rotating
objects. 19.
- Lever Arm r = distance of the axis of rotation from the line of
action of forceF
- r = Distance which is to both the axis of rotation and to an
imaginary line drawn along the direction of the force (line of
action).
- Find: Angular acceleration
- (Just as in the linear motion case, F causesa )
Lower caseGreek tau 8-4 Torque 20. 8-4 Torque Here, the lever
arm for F Ais the distance from theknobto thehinge ; the lever arm
for F Diszero ; and the lever arm for F Cis as shown. 21. 8-4
Torque Thetorqueis defined as: F =F sin F = F cos = rF sin Units of
torque: Newton-meters (N m) 22. Example 8-9 r =r 2 sin60 2 = -r 2 F
2 sin60 1 = r 1 F 1 = 1 + 2= -6.7 m N Always use the following sign
convention ! Counterclockwise rotation+ torque Clockwise rotation-
torque 23. Section 8-5: Rotational Dynamics
- Goal:Newtons 2 ndLaw for rotational motion.
- The angular acceleration isthe net torque or
-
- Analogous to Newtons 2 ndLaw :
-
- Recall, Newtons 2 ndLaw: F = ma
- Question:What plays the role of massmfor rotational
problems?
24. Simplest Possible Case A massmmoving in aCircle of radiusr ,
one forceF TANGENTIAL tothe circle = rF Newtons 2 ndLaw + relation
(a = r ) between tangential & angular accelerations F = ma = mr
So = mr 2 Newtons 2 ndLaw for Rotations Proportionality constant
between&ismr 2 (point mass only!) 25.
- Newtons 2 ndLaw, rotational motionis:
- The net torque = (moment of inertia)(angular acceleration)
- Moment of Inertiaof the body:
- Moment of Inertia I = A measure of the rotational inertia of
the body. Analogous to the massm= A measure of translational
inertia of the body.
26.
- For one particle, moving in a circle,Newtons 2 ndLaw for
rotational motion is:
- Extrapolate to a rigid body, made of many particles. Newtons 2
ndLaw, rotational motionbecomes
-
- Since is the same for all points in the body, it comes out of
the sum.
- Write =I ,where the proportionality constantI = (mr 2 ) = m 1 r
1 2+ m 2 r 2 2+ m 3 r 3 2+
- Moment of Inertia of the body
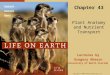
27. 8-5 Rotational Dynamics; Torque and Rotational Inertia The
quantityis called therotational inertiaof an object.
Thedistributionof mass matters here these two objects have the same
mass, but the one on the left has a greaterrotational inertia , as
so much of its mass is far from the axis of rotation. 28. 8-5
Rotational Dynamics; Torque and Rotational Inertia Therotational
inertiaof an object depends not only on itsmass distributionbut
also the location of theaxisof rotation compare (f) and (g), for
example. 29. Example 8-10
30. 8-6 Solving Problems in Rotational Dynamics
- Decide what thesystemcomprises.
- Draw afree-body diagramfor each object under consideration,
including all theforcesacting on it and where they act.
- Find theaxis of rotation ; calculate thetorquesaround it.
31. 5. Apply Newtons second law forrotation . If therotational
inertiais not provided, you need to find itbeforeproceeding with
this step. 6. Apply Newtons second law fortranslationand other laws
and principles as needed. 7.Solve . 8.Checkyour answer for units
and correct order of magnitude. 8-6 Solving Problems in Rotational
Dynamics 32. Example 8-11
33. 8-7 Rotational Kinetic Energy Thekinetic energyof a rotating
object is given byBy substituting the rotational quantities, we
find that the rotational kinetic energy can be written: An object
that has bothtranslationalandrotationalmotion also has both
translational and rotationalkinetic energy : (8-15) (8-16) 34.
Example 8-13:
- Sphere rolls down incline
- (no slipping or sliding).
- (KE) 1+(PE) 1= (KE) 2+ (PE) 2
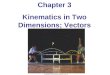
35. 8-7 Rotational Kinetic Energy When usingconservationof
energy, bothrotationalandtranslationalkinetic energy must be taken
into account. All these objects have the samepotentialenergy at the
top, but the time it takes them to get down the incline depends on
how muchrotationalinertiathey have. 36. 8-7 Rotational Kinetic
Energy The torque doesworkas it moves the wheel through an angle :
(8-17) Torque:= Fr Work:W = F = Fr = 37. 8-8 Angular Momentum and
Its Conservation In analogy with linear momentum, we can
defineangular momentum L :
- Similar to momentum case, can show, rotational version of
Newtons 2 ndLaw:
- if= 0, ( L/ t) = 0&L =constant
- Angular Momentum is conserved if total torque = 0
- Example:t = 0 , angular velocity 0 timet , angular
velocity
38. 8-8 Angular Momentum and Its Conservation Therefore, systems
that canchangetheir rotational inertia through internal forces will
also change theirrateof rotation: 39. Example 8-15
- v 2= r 2 2= r 2 (v 1 /r 1 )[(r 2 ) 2 /(r 1 ) 2 ] = v 1(r 1 /r 2
)
40. Translation-Rotation
- Mass (moment of inertia) m I
- Kinetic Energy (KE) ()mv 2 ()I 2
- CONNECTIONS :v = r a tan = r
41. Summary of Chapter 8
- Angles are measured in radians; a whole circle is 2
radians.
- Angular velocity is the rate of change of angular
position.
- Angular acceleration is the rate of change of angular
velocity.
- The angular velocity and acceleration can be related to the
linear velocity and acceleration.
- The frequency is the number of full revolutions per second; the
period is the inverse of the frequency.
42. Summary of Chapter 8, cont.
- The equations for rotational motion with constant angular
acceleration have the same form as those for linear motion with
constant acceleration.
- Torque is the product of force and lever arm.
- The rotational inertia depends not only on the mass of an
object but also on the way its mass is distributed around the axis
of rotation.
- The angular acceleration is proportional to the torque and
inversely proportional to the rotational inertia.
43. Summary of Chapter 8, cont.
- An object that is rotating has rotational kinetic energy. If it
is translating as well, the translational kinetic energy must be
added to the rotational to find the total kinetic energy.
- If the net torque on an object is zero, its angular momentum
does not change.