2. Contents History of Aircraft Navigation and Landing Systems
History of GPS in Aviation GPS and Aviation Applications GPS
Landing and Navigation Systems (WAAS and LAAS) Creating a better
navigation system and eliminating errors Effect of GPS in Aviation
Various Augmentation systems used worldwide Literature Review Case
studies References 2 3. 1900s -Pilots would land their planes in a
field in the direction that gave them the best angle relative to
the wind 1920s -Lights and approach lighting Radio navigation
(Morse Code ) WWII-Radar 1980s-Microwave landing systems (MLS)
1991- GPS began to be used GPS was originally intended for the
United States Military and Air Force In June of 1991, portable GPS
receivers began to be used in correspondence with autopilot 1994,
the FAA halted further development of MLS and focused on making GPS
the standard for navigation and landing. Brief History of
Navigation and Landing Aids in Aviation 3 4. Commercial GPS
aviation applications appeared in 1996 In 1998, Vice President Al
Gore revealed plans to upgrade GPS with two new civilian signals
for improved user accuracy and reliability, particularly with
respect to aviation safety 4 5. GPS and Aviation Applications The
satellites serve as a precise reference point Aviation navigators,
equipped with GPS receivers, use satellites as precise reference
points to locate the aircraft's position anywhere on or near the
earth The distance from the receiver to the GPS satellites can be
determined by estimating the amount of time it took the signal to
reach the GPS receiver 5 6. GPS Landing and Navigation Systems
There are two kinds of GPS landing and Navigation systems presently
in place : Wide Area Augmentation System (WAAS) & Local Area
Augmented System (LAAS) 6 7. Wide area augmentation system (WAAS)
Basic GPS fails to meet the accuracy, availability, and integrity
needed in navigation and landing of an aircraft WAAS is based on a
network of approximately 25 ground reference stations throughout
the United States Signals from GPS satellites are collected and
received by the reference stations called wide area ground
reference stations (WRSs) Precisely placed reference stations
receive GPS satellite signals and determine if any errors exist
WRSs linked to form the U.S. WAAS network Accuracy from WAAs
improves the positional accuracy 7 meters vertically and
horizontally (Less than 3 Meters) 7 8. Local Area Augmented System
(LAAS) A ground based amplification to GPS that focuses on a radius
of approximately 20-30 miles from an airport LAAS broadcasts its
correction through a very high frequency radio data link from
transmitter located on the ground Accuracy of less than one meter
in both horizontal and vertical axis compared to 15 years ago (100
Meter accuracy) Problems with LAAS: System only offers a 20 to 30
mile radius of use while the WAAS is across the entire country
Potential for failure, which means that the system could be
effected under weather conditions, solar activity, or jamming 8 9.
Creating a Better Navigation System and Eliminating Errors Combine
two common systems used in aircraft navigation, INS (Inertial
Navigation System) and GPS Neither system alone provides
sufficiently accurate and complete time series of aircraft
positions and velocities because of inherent technological problems
The INS allows accurate navigation with less than four satellites,
helps reject multipath and aids the GPS in re-acquiring signals
Errors: The intermittent loss of satellite signals caused by the
aircraft moving into or out of a satellites view, by an aircraft
maneuver, or by the weather Problems may occur during a turn. 9 10.
Effects of GPS in Aviation Enhanced safety of flight throughout the
region Seamless navigation service based on a standardized
navigation service and common avionics More efficient, optimized,
flexible, and user-preferred route structures Significant savings
from shortened flight times and reduced fuel consumption Weather
updates Reduced costs to each individual State while increasing
overall benefits to individual States and the entire region Further
economies from reduced maintenance and operation of unnecessary
ground-based systems Improved ground and cockpit situational
awareness Increased landing capacity for aircraft 10 11. Various
SBAS(Satellite- based Augmentation systems)used worldwide European
Geo-stationary Navigation Overlay Service(EGNOS)- European Union
GPS Aided Geo-Augmented Navigation System (GAGAN)- India
Multi-functional Transport Satellite (MTSAT) Satellite- based
Augmentation System(MSAS)- Japan StarFire & OmniSTAR are the
commercial SBAS presently available. 11 12. SBAS Status:
Operational Systems Wide Area Augmentation System (WAAS) United
States Operational since 2003 Supports en route, terminal and
approach operations CAT I-like approach capability (LPV-200)
Multi-function Transport Satellite (MTSAT) Satellite-based
Augmentation System (MSAS) - Japan Operational since 2007 Supports
en route, terminal and non-precision approach operations 12 13.
European Geostationary Navigation Overlay Service (EGNOS) European
Union Open Service was declared in October 2009 Safety-Of-Life
Service has been operational since March 2011 Supports En Route,
Terminal and Approach operations - APV-1 (LPV equivalent)
operational capability Global Positioning System (GPS) Aided
Geostationary Earth Orbit Augmented Navigation (GAGAN) - India In
development with plans for horizontal and vertical guidance Final
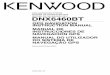
Acceptance Testing planned in 2012 13 14. 14 GAGAN Fig.1. Various
SBAS Systems Worldwide 15. Literature Review Abousalem et al.
(2000) presented a study on the DGPS performance results using the
newly modified receivers with the WAAS and EGNOS signals. Ochieng
et al. (2003) assesses the capability of GPS to provide the level
of safety required for different aircraft flight navigation
operations. It presents an analysis of the protection offered
against potential catastrophic GPS failures at system and user
levels. This is followed by an assessment of the different
approaches to augmenting GPS for civil air navigation. Results show
the inadequacy of GPS as a system for real-time safety critical
use. Witte et al. (2005) demonstrated accuracy of a WAAS-enabled
GPS unit for the determination of position and speed. Comparison
with the new and published data showed significant enhancements in
both position and speed accuracy over a non-WAAS system. Position
data collected during straight 15 16. line cycling showed
significantly lower sample-to-sample variation (mean absolute
deviation from straight line 0.11 vs. 0.78 m) and greater
repeatability from trial to trial (mean absolute deviation from
actual path 0.37 vs. 4.8 m) for the WAAS-enabled unit compared to
the non-WAAS unit. Rao et al. (2007) discussed the implementation
of the GAGAN-TDS (Technology Demonstration System). GAGAN TDS
(Technology Demonstration System) is a forerunner for the
operational Satellite Based Navigational System over the Indian
region. The TDS phase of the project implements minimum set of
elements for demonstrating the SBAS proof of concept over the
Indian region. Ettore et al. CIRA (2011) describes the algorithm
implemented to process the broadcasted EGNOS SIS in order to obtain
a position solution and integrity information compliant with RTCA
DO229C. Moreover, they present test procedures and experimental
results that may be used as a design guideline for monitoring
manufacturing compliance and, in certain cases, for obtaining
formal DO229C certification of equipment design and manufacture. 16
17. Jiwon Seo et al. (2011) studied aviation availability during a
severe scintillation period observed using data from the previous
solar maximum is analyzed. The effects from satellite loss due to
deep fading and shortened carrier smoothing time are considered.
Availability results for both vertical and horizontal navigation
during the severe scintillation are illustrated. Finally,a
modification to the upper bound of the allowed reacquisition time
for the current Wide Area Augmentation System (WAAS) Minimum
Operational Performance Standards (MOPS) is recommended based on
the availability analysis results and observed performance of a
certified WAAS receiver. 17 18. Case Studies 1. Korean Wide Area
Differential Global Positioning System Development Status and
Preliminary Test Results -Ho Yun* and Changdon Kee, Doyoon Kim
(Intl J. of Aeronautical & Space Sci. 12(3), 274282 (2011)
DOI:10.5139/IJASS.2011.12.3.274) 18 19. Since 1999, the Korea has
installed the NDGPS reference stations and has been providing local
area DGPS service. Eleven coast reference stations and six inland
reference stations cover the whole area of South Korea. From 2003
to 2005, WADGPS research groups in SNU have developed the Korean
WADGPS Test Bed (KWTB). The objectives of the KWTB are to develop
the related essential technology, to verify the feasibility of
Korean WADGPS. The test bed consists of four WRSs (Wide-Area
Reference Stations) and one WMS(Wide-Area Main Station). WRSs have
been installed in the existing facilities of NDGPS reference
stations. Current Status: WRS receives the measurements and
navigation messages from the GPS receiver, and validates these data
by quality monitoring. WRS also plays an added role as a permanent
test user for monitoring and analyzing performance of the demo
system including accuracy, integrity, availability, and continuity.
19 20. WMS receives the raw data and WRS data from the multiple
WRSs. After time synchronization of multiple WRS data, it checks
the integrity flags and determines the optimal issue of data
ephemerides (IODE). WMS estimate the ionospheric grid point
vertical delays As in Eq. , the ionospheric delay which is
estimated from reference station contains receiver interfrequency
bias (Rx IFB) and transmitter IFB (Tx IFB). 20 Subscript i means
the i-th reference station and superscript j means the j-th
satellite Tx IFB can be easily eliminated using time of group delay
value, which is from GPS navigation data. Eq. is an Tx IFB
compensated ionospheric delay 21. 21 Fitting the ionosphere as
spherical harmonics model,WMS estimates the Rx IFB of WRS. Eq.
shows the second order spherical harmonics model. 22. 22
Substituting , ionospheric delay and Rx IFB can be modeled as a
function of local time and geomagnetic latitude. For estimating the
Rx IFB in real time, Kalman filter has been implemented.The below
Eqn has been used as an observation equation. Satellite orbit and
clock errors are estimated using inverted GPS methods with Kalman
filter After estimating the correction it generates the integrity
information and SBAS messages. 23. Korean WADGPS development plan
The main goal of this phase is to show the capability of Korean
WADGPS using pseudolite and existing NDGPS infrastructures in
real-time.This project is scheduled for 2010 to 2014. According to
this plan, after this project, Korea will launch a geostationary
multifunctional satellite with a navigation payload which will be
broadcasting augmenting signals. This project is under active
development to satisfy the following objectives: - Increased
overall navigation performance (land/ air/marine, civil/military) -
Independent & interoperable with other SBASs - Certified
quality of service - Qualified for safety critical applications. 23
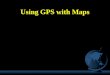
24. 24 Fig.2. Milestones of Korean wide area differential global
positioning system development. 25. 25Fig.3.Project schedule (phase
2). 26. Preliminary Test To show the initial capability of KWTB, a
preliminary test was conducted via simulation. Satellite orbit and
clock errors were made by RINEX navigation files and precise orbit
data from IGS SP3 files. Satellite orbit and clocks calculated from
SP3 are assumed as true. Ionospheric delay was generated from IONEX
files. The other error sources such as tropospheric delay or
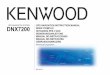
receiver noise were generated by accurate modeling. 26 27. 27
Fig.4.Time history of satellite range errors. Fig.5.Histogram of
satellite range errors for each PRN. 28. The history and the
current status of the Korean WADGPS development plan is presented.
The Korean WADGPS development phase 1 has been successfully
completed. Phase 2 has just started, with the participation of one
government office and seven research institutes and universities.
In this phase the technologies of the WADGPS ground system and
pseudolite broadcasting system are secured. In phase 3, Korea will
launch multi-functional GEO satellites and initial operation of
Korean SBAS will be started. After this project, Korea will join
the ranks of advanced countries in GNSS. 28 29. 2. Modified
Ionospheric Tomography algorithm using GAGAN data - D.Venkata
Ratnam1, A.D. Sarma1, V. P.V.D. Somasekhar Rao and B.M.Reddy (The
Journal of navigation )funded by ISRO ,Bangalore Vide Order No:
CAWSES:05 Modeling of ionospheric delay is one of major challenges
for GPS Aided Geo Augmented Navigation (GAGAN) system. An attempt
is made to characterize the Indian ionosphere using tomography
technique. One of the prominent ionospheric tomography model is
spherical harmonics model with Empirical Orthogonal Functions
(EOF). But it requires more number of coefficients. Therefore, the
model is modified to reduce the coefficients. The paper describes a
3-D ionospheric model, which is developed on the basis of
tomographic techniques with GPS data. 29 30. Tomography refers to
the cross-sectional imaging of an object from either transmission
or reflection data acquired by illuminating the object from many
different directions. The modified tomograhic algorithm is tested
using real time data over the Indian region. The goal of
ionospheric tomography is to find the electron distribution as a
function of latitude, longitude and height in ionosphere. The
function based models have been chosen for development of
ionospheric model. The reason for this is that they require less
processing time and in turn would be useful in real time
applications. 30 31. The TEC data is applied to tomographic
algorithm to determine electron density with respect to latitude,
longitude and altitude. TEC can be expressed in terms of electron
density as, TEC =N( r ) dl ( r ) where R(r) represents GPS receiver
station. S(r) represents satellite N(r) represents Electron density
dl(r) is unit length of altitudes Eq can be writeen in terms of
electron density N(r) as 31 S( r ) R ( r ) 32. N(r)dl(r) a (h) b Y
( , )dl(r) 32 S( r ) R( r ) S( r ) R( r ) kk 1 1 where, a (h)
denotes EOFs k represents number of EOFs. q and f represent IPP
longitude and latitude respectively. b Y (q,f) , represents
spherical harmonics function. bl is number of spherical harmonics
coefficients. Eq is rewritten in terms of two variables as
TECi=[Hi11 Hi12 Hi1m Hi21Hikl]x where, i is the number of TEC
measurements k k 1 1 33. H = ( h ) .Y ( , ) d l( r ) and x=[a1b1
a1b2.........a kbl a2b1....................akbl]T The design matrix
[H] is formed using spherical harmonics and EOF functions. Eq can
be further approximated as 33 kl S( r ) R( r ) k 1 34. or simply,
TECi=Hx We can estimate x (electron density) by least-square
solution and reconstruct the ionosphere from basis functions with
in terms of coefficients. Modified tomographic algorithm In the
modified tomographic algorithm the numbers of coefficients for
obtaining electron densities are reduced. Consequently, the amount
of correction data to be transferred is reduced. In this, the
design matrix (H) is modified tonon linear form. Eq can be
expressed in non linear form as , 34 35. 35 Finally the unknown
coefficients can be estimated using either kinematic or Kalman
filter. However, in this paper, linear least square estimator is
used. A 3-D modified ionospheric tomographic method has been
described in this paper. The advantage of the function based model
is that it requires less computational time for estimating
ionospheric delays. Accordingly, ionospheric corrections can be
transferred within time to the user. This technique indicates the
occurrence of maximum electron density at thecrest region. The
accuracy of model is to be further validated using more data
corresponding to several seasons. 36. Summary The Role of GPS in
Aviation is a budding one and will only continue to grow as air
travel becomes the main mode of transport in later years. There are
3 operational SBAS (satellite based augmentation systems) in
WAAS,EGNOS & MSAS and there are 2 which are nearing completion
(GAGAN,Korean WADGPS) and many more in the pipeline in various
contries. GPS has become an integral part of the aviation industry
and its importance will only continue to grow in coming years. But
is is not all rosy as GPS has some disadvatages too like its
availability during strong ionospheric scintillation . There is
also the question of GPS Integrity and its impact on Aviaton safety
but at the end of the day, the advantages it offers far outweigh
its short-comings. Many studies are being conducted and many new
algorithms are being tested to overcome the short-comings and make
GPS all the more better for aviation. 36 37. References Ettore De
Lellis, CIRA (Centro Italiano Ricerca Aerospaziale)- An EGNOS Based
Navigation System for Highly Reliable Aircraft Automatic Landing Ho
Yun* and Changdon Kee, Doyoon Kim (Intl J. of Aeronautical &
Space Sci. 12(3), 274282 (2011) DOI:10.5139/IJASS.2011.12.3.274)-
Korean Wide Area Differential Global Positioning System Development
Status and Preliminary Test Results Jitu Sanwale, Dhan Jeet Singh,
U G Salawade(International Journal of Scientific & Engineering
Research, Volume 4, Issue 12, December-2013 ) - The Global
Navigation Satellite System (GNSS) and Indian Satellite Based
Augmentation System (GAGAN) Jiwon Seo,Todd Walter,Per Enge (IEEE
VOL. 47, NO. 3 JULY 2011)- Availability Impact on GPS Aviation due
to Strong Ionospheric Scintillation 37 38. K.N.Suryanarayana
Rao,ISRO (IJRSP Vol.36,August 2007)-GAGAN- The Indian Satellite
based Augmentation System Mohamed Abousalem, Dr. Sergei Lusin, Mr.
Oleg Tubalin, Mr. Javier de Salas(GNSS 2000 Conference, Edinburgh,
Scotland, UK, May 1-4, 2000)- Performance Analysis of GPS
Positioning Using WAAS and EGNOS Rajat Acharya, Neha Nagori,
Nishkam Jain, Surendra Sunda, Sawarmal Regar, M R.Sivaraman &
Kalyan Bandopadhyay(Indian Journal of Radio Space Physics, Vol.36,
Oct 2007, 394-404 pgs)- Ionospheric studies for the implementation
of GAGAN Suryanarayana Rao,Mr.A.S.Ganeshan,Mr.P.Soma,Dr.Surendra
pal(ISRO) (58th International Astronautical Congress 2007)- GAGAN (
GPS AIDED GEO AUGMENTED NAVIGATION) - INDIAN SBAS SYSTEM T.H.
Witte, A.M. Wilson,(Journal of Biomechanics 38 (2005) 1717 1722)-
Accuracy of WAAS-enabled GPS for the determination of position and
speed over ground 38 39. Venkata Ratnam, A.D. Sarma1, V. P.V.D.
Somasekhar Rao and B.M.Reddy (The Journal of navigation )funded by
ISRO ,Bangalore Vide Order No: CAWSES:05)-Modified Ionospheric
Tomography algorithm using GAGAN data Washington Y. Ochieng and
Knut Sauer, David Walsh and Gary Brodin, Steve Griffin and Mark
Denney (THE JOURNAL OF NAVIGATION (2003), 56, 5165.)- GPS Integrity
and Potential Impact on Aviation Safety 39 40. Thanks for Listening
! 40