Embed Size (px)
Citation preview

1
AT 2402 VEHICLE DYNAMICS _ UNIT III NOTES

2

3

4

5

6

7

8

9

10

11

12

13

14

15

16

17

18

19

20

21

22

23

24

25
MULTI DEGREE FREEDOM SYSTEMS

Orthogonality Principle
It states that the principal nodes are orthogonal to each other. In other words, expansion
theorem applied to vibration problems indicates that any general motion (x) for n masses may be
broke into components each of which corresponds to a principal nod
obtaining the response of vibration systems and is called modal analysis.
Modal analysis and mention its applications
Modal analysis can be applied to discrete as well as continuous systems.
Mode shapes & orthogonal decompos
Mode shapes of a structure can be extracted without measuring a series of frequency response
functions by implementing proper orthogonal decomposition on the measured response data. If
the proper orthogonal decomposition is app
proper orthogonal mode converges to the true normal modes of the structure. The degree of
deviation of the other extracted proper orthogonal modes from the true normal modes of the
structure depends on the spatial resolution, which is determined by the number of response
measurement positions. The suggested procedure of applying the proper orthogonal
decomposition to the cross-spectral density functions can extract all of the normal modes
contained in the structural responses without suffering from the limitation of the number of
response measurement positions. Experimental data of a homogeneous free
non-homogeneous free-free beam were used to compare the proper orthogonal modes and the
structural normal modes, and the results strongly support the applicability of the proper orthogonal
decomposition to the structural vibration analysis.
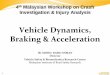
Closed coupled system.
In fig, an n degree translational and rotational close coupled system is given
the following equations can be written:x=e
m1ë1+K1e1+ K2(e1- e2)=0
m1ë2+K2(e2 - e1)+ K3(e2 – e3)=0
miëi+Ki(ei – ei -1)+ Ki+1(ei – ei+1)=0
We can ignore damping for free vibration, as the studies, as the natural frequencies are not
significantly effected by presence of damping. The above equations can also be used directly for
torsion with appropriate alternation.
[M] { ë}+[K] {e}=0
[M] is a square mass matrix
[K] is a stiffness matrix
In above equation, [K] {e} defines local force u
equation in this form called stiffness method using the displacements also called displacement
26
It states that the principal nodes are orthogonal to each other. In other words, expansion
theorem applied to vibration problems indicates that any general motion (x) for n masses may be
broke into components each of which corresponds to a principal node. This forms the basis of
obtaining the response of vibration systems and is called modal analysis.
Modal analysis and mention its applications
Modal analysis can be applied to discrete as well as continuous systems.
Mode shapes & orthogonal decomposition in vibration analysis.
Mode shapes of a structure can be extracted without measuring a series of frequency response
functions by implementing proper orthogonal decomposition on the measured response data. If
the proper orthogonal decomposition is applied on the time responses of the structure, only one
proper orthogonal mode converges to the true normal modes of the structure. The degree of
deviation of the other extracted proper orthogonal modes from the true normal modes of the
the spatial resolution, which is determined by the number of response
measurement positions. The suggested procedure of applying the proper orthogonal
spectral density functions can extract all of the normal modes
e structural responses without suffering from the limitation of the number of
response measurement positions. Experimental data of a homogeneous free
free beam were used to compare the proper orthogonal modes and the
ructural normal modes, and the results strongly support the applicability of the proper orthogonal
decomposition to the structural vibration analysis.
In fig, an n degree translational and rotational close coupled system is given. For free vibration,
the following equations can be written:x=e
e3)=0
ei+1)=0
We can ignore damping for free vibration, as the studies, as the natural frequencies are not
significantly effected by presence of damping. The above equations can also be used directly for
torsion with appropriate alternation.
In above equation, [K] {e} defines local force under static condition .The method of writing
equation in this form called stiffness method using the displacements also called displacement
It states that the principal nodes are orthogonal to each other. In other words, expansion
theorem applied to vibration problems indicates that any general motion (x) for n masses may be
e. This forms the basis of
Mode shapes of a structure can be extracted without measuring a series of frequency response
functions by implementing proper orthogonal decomposition on the measured response data. If
lied on the time responses of the structure, only one
proper orthogonal mode converges to the true normal modes of the structure. The degree of
deviation of the other extracted proper orthogonal modes from the true normal modes of the
the spatial resolution, which is determined by the number of response
measurement positions. The suggested procedure of applying the proper orthogonal
spectral density functions can extract all of the normal modes
e structural responses without suffering from the limitation of the number of
response measurement positions. Experimental data of a homogeneous free-free beam and a
free beam were used to compare the proper orthogonal modes and the
ructural normal modes, and the results strongly support the applicability of the proper orthogonal
. For free vibration,
We can ignore damping for free vibration, as the studies, as the natural frequencies are not
significantly effected by presence of damping. The above equations can also be used directly for
nder static condition .The method of writing
equation in this form called stiffness method using the displacements also called displacement

method. In fact, for close coupled systems, the finite element method yields identical equations as
above.
For free vibrations, the above solutions of can written as
{x}={X} cos pt
Where {X} represents the amplitudes of all the masses and p is the natural frequency. These
above equations reduce to
{[K]-p2[M]] {X} = 0
The above equations known as eigen value problem in
the aid of computer for a fairly large no of masses.p2 is called as the characteristic value of
equation.
There will be n such values of an n degree system. For each of the eigen value, there exists a
corresponding eigen vector{x}, also called as a characteristic vector. This eigen vector will
represent the mode shape for a given frequency of the system.
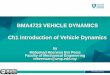
Far coupled system:
In fig an n degree far coupled system is shown with masses m1,m2,….,mi, at station 1,2,…..,
respectively. For a freely vibrating beam, the only external load is the inertia load due to masses
m1,m2….. Following the influence coefficient procedure discussed two degree of freedom, we can
write x=e
α11m1ë1+ α12m2ë2+………..+
α21m1ë1+ α22m2ë2+………..+
-----------------------------------------------------
αi1m1ë1+ αi2m2ë2+………..+ αiimi
In arriving at the above equations, the forces are treated as unknowns and expressed in terms of
flexibility factor or influences coefficie
contrary to the method adopted for close coupled systems where displacement are considered
unknowns and the stiffness matrix setup.
Denoting [α] as the influences coefficient matrix, the above
[D] { ë} + [I] {e} = 0
{ ë}+ [α]-1{e} = 0
[D] is the dynamic matrix
27
method. In fact, for close coupled systems, the finite element method yields identical equations as
vibrations, the above solutions of can written as
Where {X} represents the amplitudes of all the masses and p is the natural frequency. These
The above equations known as eigen value problem in matrix algebra and it can be solved with
the aid of computer for a fairly large no of masses.p2 is called as the characteristic value of
There will be n such values of an n degree system. For each of the eigen value, there exists a
eigen vector{x}, also called as a characteristic vector. This eigen vector will
represent the mode shape for a given frequency of the system.
In fig an n degree far coupled system is shown with masses m1,m2,….,mi, at station 1,2,…..,
respectively. For a freely vibrating beam, the only external load is the inertia load due to masses
m1,m2….. Following the influence coefficient procedure discussed two degree of freedom, we can
ë2+………..+ α1imiëi+e1=0
m2ë2+………..+ α2imiëi+e2=0
-----------------------------------------------------
αiimiëi+ei=0
In arriving at the above equations, the forces are treated as unknowns and expressed in terms of
flexibility factor or influences coefficients, hence this approach is called force or flexibility method,
contrary to the method adopted for close coupled systems where displacement are considered
unknowns and the stiffness matrix setup.
] as the influences coefficient matrix, the above equation can be written as
Or
method. In fact, for close coupled systems, the finite element method yields identical equations as
Where {X} represents the amplitudes of all the masses and p is the natural frequency. These
matrix algebra and it can be solved with
the aid of computer for a fairly large no of masses.p2 is called as the characteristic value of
There will be n such values of an n degree system. For each of the eigen value, there exists a
eigen vector{x}, also called as a characteristic vector. This eigen vector will
In fig an n degree far coupled system is shown with masses m1,m2,….,mi, at station 1,2,…..,i
respectively. For a freely vibrating beam, the only external load is the inertia load due to masses
m1,m2….. Following the influence coefficient procedure discussed two degree of freedom, we can
In arriving at the above equations, the forces are treated as unknowns and expressed in terms of
nts, hence this approach is called force or flexibility method,
contrary to the method adopted for close coupled systems where displacement are considered
equation can be written as

28
For a four degree of freedom , the natural frequencies are obtained by setting the determinant
equation to zero.
| [D] – [1/p2][I] | = 0
Orthogonality of mode shapes
The mode shapes of a dynamic system exhibit orthogonality property, which is very useful in
simplifying the analysis for forced and transient vibrations. Let [M] and [K] represent the mass and
stiffness properties of a system, expressed in the form
[K] {u} = λ2 [M] {u}
{u} is the state vector and λ2 is the eigen value. For each eigen value λi, there is a corresponding
mode shape. Consider any two modes say r and s. Then
[K] {ur} = λr2 [M] { ur }
[K] {us} = λs2 [M] { us}
Premultiply the first one by { us}T and the second one by { ur}T in the above equations. Then
{ us}T [K] {ur} = λr2 { us}T [M] { ur }
{ ur}T [K] {us} = λs2 { ur}T [M] { us}
{ us}T [M] {ur} = 0 r ≠ s
ģ ={ us}T [M] {ur}≠ 0 r=s
ģ = generalized mass of the system
{ us}T [K] {ur} = 0 r ≠ s
ķ={ us}T [M] {ur}≠ 0 r=s
ķ = generalized stiffness of the system
Modal analysis:
When the degree of freedom of the system is large and / or when the forcing functions are
nonperiodic, in such cases a more convenient method known as modal analysis can be used to
solve the problem. In this method, the expansion theorem is used, and the displacements of the
masses are expressed as a linear combination of the normal modes of the system.

29