G -structures and other dense/codense expansions
Yevgeniy Vasilyev
Memorial University of NewfoundlandGrenfell Campus, Corner Brook, NL, Canada
Joint work with Alexander Berenstein
Workshop on Tame Expansions of O-minimal StructuresKonstanz, October 1-4, 2018

Outline
I geometric theories
I dense/codense expansions
I axiomatization
I Q-independent sets and back-and-forth
I basic properties of dense/codense expansions
I “Q-bases”
I effect on acl
I effect on forking and SU-rank (SU-rank 1 case)
I effect on one-basedness (SU-rank 1 case)
I effect on NIP-like conditions
I application: linearity
I separating “geometry” and “random noise”

Geometric theories
Definition
A first order theory T is called geometric if
I in any model of T , acl satisfies the exchange property
I T eliminates quantifier ∃∞(i.e. for any φ(x , y) there is n ∈ ω such thatwhenever |φ(M, a)| > n, φ(M, a) is infinite)
By geometric structures we mean models of geometric theories.
In any geometric structure, acl induces a pregeometry, with thenatural notion of independence (denoted | ) and dimension.
We can also define dim(φ(x , b)) = max{dim(a/b) | |= φ(a, b)}.

A “map” of geometric structures

A “map” of geometric structures

A “map” of geometric structures

A “map” of geometric structures

A “map” of geometric structures
Unary expansions
Add a new unary predicate symbol Q to the language L = L(T )and consider models (M,Q) in the expanded languageLQ = L ∪ {Q}, where M |= T .

Unary expansions: examples
I elementary pairs
I belles paires (Poizat 1983) - stable caseI dense pairs (van den Dries 1998) - o-minimal caseI generic/lovely pairs (V. 2001; Ben Yaacov, Pillay, V. 2003) -
supersimple SU-rank 1 and simple casesI lovely pairs of geometric structures (Berenstein, V., 2010)
I generic predicate (Chatzidakis, Pillay 1998)
I indiscernible sequence (Baldwin, Benedikt 2000)
I multiplicative subgroup of a field (Gunaydin, van de Dries2005)
I independent dense subsets of o-minimal structures (Dolich,Miller, Steinhorn 2016)
I independent dense subsets of geometric structures(Berenstein, V. 2016)

Dense/codense subsets
Definition
Let T be a geometric theory, M |= T .A unary expansion (M,Q) of M is dense/codense, if anynonalgebraic 1-type p(x ,A) (in T ) over a finite-dimensionalA ⊂ M has realizations in
I Q(M) ( ”density” property)
I M\ acl(A ∪ Q(M)) (”codensity” or extension property).

Dense/codense in the geometric setting

Lovely pairs vs. H-structures
Definition
Given a geometric T , M |= T and a dense/codense expansion(M,Q) of M,
I if Q(M) is algebraically closed, we call (M,Q) a lovely pair(in this case Q(M) � M);
I if Q(M) is algebraically independent, we call (M,Q) anH-structure
Notation: we use (M,P) for lovely pairs and (M,H) forH-structures.

Lovely pairs vs. H-structures
In fact, for any H-structure (M,H),(M, acl(H(M))) is a lovely pair (in particular, acl(H(M)) � M).

The field case: G -structures
We can consider an ”intermediate” construction between lovelypairs and H-structures:
I Let T be the theory of an algebraically closed or real closedfield (K ,+, ·, 0, 1), and let (K ,H) be its H-structure.
I Let G (K ) = the multiplicative group generated by H(K ).
I (K ,G ) is dense-codense (we call it a G -structure), andH(K ) ⊂ G (K ) ⊂ acl(H(K )).
I G (K ) is a free abelian group.
I G (K ) is linearly independent in K .This is an example of a group with the Mann property.Expansions of fields with multiplicative subgroups with theMann property were studied by van den Dries and Gunaydin.

Axiomatizing density/codensity
Let T be a geometric theory (assume QE for convenience).Then a sufficiently saturated model of the following axioms in thelangauge LQ = L ∪ {Q} is a dense/codense expansion of T :
I T
I density: for any L-formula φ(x , y),
∀y (∃∞x φ(x , y)→ ∃x ∈ Q φ(x , y))
I extension (codensity): for any L-formulas φ(x , y) andψ(x , y , w) where ψ witnesses x ∈ acl(y , w),
∀y (∃∞x φ(x , y)→ ∃x (φ(x , y) ∧ ∀w ∈ Q ¬ψ(x , y , w)))

Theories TP , TH
Theories TP and TH can be obtained by adding axioms saying
I acl(P(M)) = P(M) (for TP)
I H(M) is acl-independent (for TH)
Sufficiently saturated models of TP/TH are again lovely pairs/H-structures.
Note: extension (codensity) axioms are not needed for TH if T is“strongly non-trivial”.

Theory TG
What does a sufficiently saturated model (K ∗,G ) ofTh(K ,+, ·, 0, 1,G ) look like, for a G -structure generated by anH-structure?
Note that (K ∗,G ) is no longer generated by an H-structure:G (K ∗) will have divisible elements.
But G (K ∗) is still linearly independent, dense and codense.
Theory TG
From the work of Gunaydin and van den Dries on fields withmultiplicative subgroups having the Mann property, one gets thatTh(K ,+, ·, 0, 1,G ) can be axiomatized as follows:
For ACF:
I K is an algebraically closed field (of fixed characteristic)
I G (K ) is a subgroup of K×
I G (K ) is linearly independent over Q and satisfies the theoryof free abelian groups (of infinite rank)
Theory TG
For RCF:
I K is a real closed field
I G (K ) is a subgroup of K>0
I G (K ) is dense in K>0
I for any n > 1, G [n] (subgroup of nth powers) has infiniteindex in G
I G (K ) is linearly independent over Q

Theory TG
Thus, in both cases we get a complete theory TG .
From now on, by a G -structure we will mean a sufficientlysaturated model of TG .

Q-independence
For any unary expansion (M,Q) of a geometric structure M and asubset A ⊂ M, we say that A is Q-independent, ifA |
Q(A)Q(M), i.e. for any finite a in A
dim(a/Q(M)) = dim(a/Q(A)).
Note: Any A ⊂ M can be extended to an Q-independent set byadding a subset of Q(M).

Existence of H-structures (lovely pairs, G -structures)
Any structure M |= T with an independent subset H(M) can beextended to an H-structure (N,H) of T in such a way that M isH-independent in (N,H).

Existence of H-structures (lovely pairs, G -structures)
Given (M,H) ...

Existence of H-structures (lovely pairs, G -structures)
Given (M,H), take a saturated extension of M:

Existence of H-structures (lovely pairs, G -structures)
Choose two independent sets of independent realizations of allnon-algebraic 1-types over M:

Existence of H-structures (lovely pairs, G -structures)
Include one of them in H:

Existence of H-structures (lovely pairs, G -structures)
Iterate ω times:

Existence of H-structures (lovely pairs, G -structures)
Take the union:

QE for Q-independent tuples
Given any two H-structures of T , (M,H) and (N,H), andH-independent tuples a ∈ M, b ∈ N, we have
tp(a,H(a)) = tp(b,H(b))⇒ tpH(a) = tpH(b).
Same is true for P-independent tuples in lovely pairs.
In the case of G -structures, we need to add equality of (ordered)group types of G -parts of the tuples.

Back-and-forth for H-independent tuples
Given c ∈ acl(a) ...
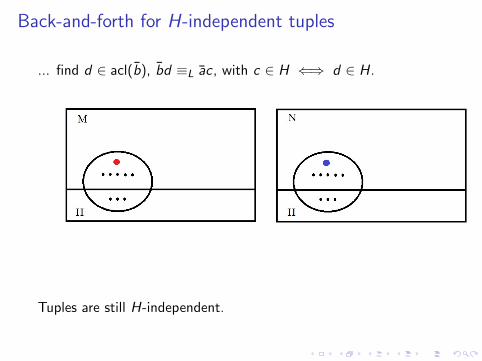
Back-and-forth for H-independent tuples
... find d ∈ acl(b), bd ≡L ac, with c ∈ H ⇐⇒ d ∈ H.
Tuples are still H-independent.
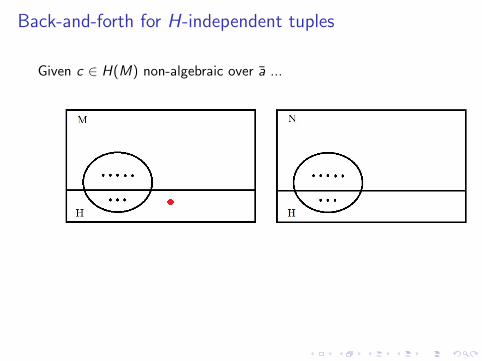
Back-and-forth for H-independent tuples
Given c ∈ H(M) non-algebraic over a ...

Back-and-forth for H-independent tuples
... find d ∈ H(N) such that bd ≡L ac (using density).
Tuples are still H-independent.

Back-and-forth for H-independent tuples
Given c ∈ acl(aH(M))\H(M) ...

Back-and-forth for H-independent tuples
... find h ∈ H(M) such that c ∈ acl(ah) ....
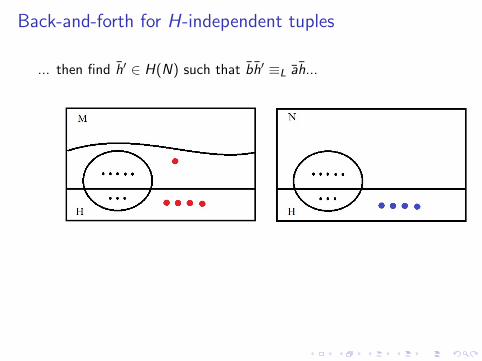
Back-and-forth for H-independent tuples
... then find h′ ∈ H(N) such that bh′ ≡L ah...

Back-and-forth for H-independent tuples
... then take d ∈ N such that bh′d ≡L ahc.
d ∈ acl(bh′) ⇒ d 6∈ H(N). Tuples are still H-independent.

Back-and-forth for H-independent tuples
Given c ∈ M\ acl(aH(M)) ....

Back-and-forth for H-independent tuples
... find d ∈ N\ acl(bH(N)) with bd ≡L ac (using extension).
Tuples are still H-independent.

Theory TQ
As a consequence of QE for Q-independent tuples, we get:
I all lovely pairs / H-structures / G -structures are elementarilyequivalent
I this gives rise to the complete theories
I TP (lovely pairs)I TH (H-structures)I or (in the cases of ACF or RCF) TG (G -structures)
I each of TQ has an explicit axiomatization
Quantifier elimination
TQ has QE down to boolean combination of formulas of the form∃y ∈ Q φ(x , y), where φ is an L-formula.
Small and Large
We work in a sufficiently saturated (M,Q) |= TQ .
I Small closure of A ⊂ M is given by scl(A) = acl(A ∪ Q(M)).
I An LQ-definable subset X of M is small if X ⊂ scl(a) for afinite tuple a ∈ M.
I Otherwise, we call X large.
I For any LQ-definable set X ⊂ M, there is an L-definable setY ⊂ M such that X∆Y is small.

Some properties of TQ (TP1, TH
2, TG )
I When passing from T to TQ the following properties arepreserved:
I stability (superstability, except for TG )I simplicity (supersimplicity, except for TG )I NIP
I In SU-rank 1 case:
I one gets a reasonable description of forking in TQ (in terms offorking over Q and forking of ”Q-bases”)
I The SU-rank of TQ reflects the ”geometric complexity” of T .
1A. Berenstein, E. Vassiliev, On lovely pairs of geometric structures, Ann.Pure Appl. Logic, 161 (7), 2010, 866-878
2A. Berenstein, E. Vassiliev, Geometric structures with a dense independentsubset, Selecta Mathematica - N.S., 22(1), 2016, 191-225
“Q-bases”
Suppose C ⊂ M is Q-independent, a ∈ M a tuple.
We can split a into a′ and a′′ where a is independent overC ∪ Q(M) and a′′ ∈ acl(a′C Q(M)).
We can find a finite b ∈ Q(M) such that a′′ ∈ acl(a′bC ).Thus, abC is Q-independent.
Question: can we choose a minimal such b “canonically”?

“Q-bases”
H-structures: There is a unique minimal b ∈ H(M), call it theH-basis of a over C : b = HB(a/C ).
G-structures: There is no unique minimal b ∈ G (K ), but allminimal b are interdefinable, in the group language, over G (C ).We call dclgr (b) the G-basis of a over C , GB(a/C ).
Lovely pairs: if M is supersimple of SU-rank 1 with EI/WEI/ GEI(e.g. ACF) we can take Cb(a/C ).

What happens to acl?
Three closure operators in (M,Q): acl, aclQ and scl.
Clearly, acl(A) ⊂ aclQ(A).
Any Q-independent acl-closed set is aclQ closed. Thus, we have:
I aclQ(A) ⊂ acl(A ∪ Q(M)) = scl(A)
I aclQ(A) =⋂{B|A ⊂ B, B = acl(B) and is Q − independent}
Question: when aclQ = acl?

What happens to acl: H-structures
I HB(a) ∈ aclH(a)
I aclH(a) = acl(aHB(a))
I aclH -closed sets are always H-independent.
I If a ∈ acl(H(M)), then a is interalgebraic with HB(a) (in thesense of aclH).
I aclH = acl ⇐⇒ acl is disintegrated, i.e.acl(A) =
⋃a∈A acl(a).

What happens to acl: G -structures
Similar to H-structures:
aclG (a) = acl(aGB(a))
aclG -closed sets are G -independent.
What happens to acl: lovely pair case
I In a pair (V ,P) of vector spaces, any acl-closed set (subspaceof V ) is P-independent (by modularity), hence, aclP = acl.
I In a pair (K ,P) of algebraically closed fields, aclP 6= acl:
Take a, b, c ∈ K algebraically independent, so thatb, c ∈ P(K ) and a 6∈ P(K ). Let d = ab + c . ThenaclP(a, d) = acl(a, b, c) 6= acl(a, d).
I acl = aclP iff T is linear... More on this later in the talk.

Forking in (M ,Q) in supersimple SU-rank 1 case
Let C ⊂ B ⊂ M, a ∈ M.
Then a | QBC ⇐⇒
a |B Q(M)
C and Q − base of a C |Q−base ofC
Q−base of B.
Lovely pairs: a | PBC ⇐⇒
a |B P(M)
C and Cb(a C/P(M)) |Cb(C/P(M))
Cb(B/P(M)).
H-structures: ( B,C H-independent) a | HBC ⇐⇒
a |B H(M)
C and HB(a C ) |HB(C)
HB(B)
G-structures: ( B,C G -independent) a | QBC ⇐⇒
a |B Q(M)
C and GB(a C ) |GB(C)
GB(B)

Properties of TH : SU-rank 1 case
Description of forking in TH for T supersimple of SU-rank 1:
Let C ⊂ D be aclH -closed, then tp(a/D) forks over C iff
I a ∈ D\C (becoming algebraic), or
I a ∈ acl(D ∪ H)\ acl(C ∪ H) (becoming small), or
I HB(a/D) ( HB(a/C ) (reduction of H-basis)
It follows that H(x) has SU-rank 1.

Properties of TH : SU-rank 1 case
SU-rank of 1-types in TH :Suppose C = aclH(C ), a a single element.
I T trivial:
I SU(a/C ) = 0 ⇐⇒ a ∈ CI a ∈ scl(C )\C ⇒ SU(a/C ) = 1I a 6∈ acl(C )⇒ SU(a/C ) = 1
I T nontrivial:
I SU(a/C ) = 0 ⇐⇒ a ∈ CI a ∈ scl(C )\C ⇒ SU(a/C ) = |HB(a/C )|I a 6∈ scl(C )⇒ SU(a/C ) = ω (unless a is a “trivial” element)

Properties of TH : SU-rank 1 case
Proposition
Let T be supersimple of SU-rank 1. Then TH is supersimple
and has SU− rank =
{1, T is trivialω, T nontrivial

Properties of TH : SU-rank 1 case
Canonical bases in TH :
I T SU-rank 1, B = aclH(B) ⇒ CbH(a/B) is interalgebraicwith Cb(aHB(a/B)/B).
I In particular, we have geometric elimination of imaginaries in(TH)eq down to T eq.

Properties of TH : SU-rank 1 case
Recall: A theory is 1-based if Cb(a/B) ∈ acleq(a).
1-basedness is not preserved when passing to TH .

Properties of TH : SU-rank 1 case
I Let T be the theory of infinite vector spaces over F2. Let(V ,H) be an H-structure of T . Take v ∈ H(V ),u ∈ V \H(V ), t = u + v .
I Then CbH(t/u) is interalgebraic withCb(tHB(t/u)/u) = Cb(tv/u) = u. However,u 6∈ aclH(t) = span(t) = {0, t}.
I But two independent realizations of tpH(t/u) are enough:u ∈ aclH(t, t ′). Thus TH is ”2-based” (true in general).

Properties of TH : SU-rank 1 case
A recent result of Carmona:
I for n ≥ 2: T n-ample ⇐⇒ TH n-ample
I in particular:T 1-based (not 1-ample) ⇒ TH is CM-trivial (not 2-ample)

Properties of TP : SU-rank 1 case
Proposition (V., 2001)
Let T be supersimple of SU-rank 1. Then TP is supersimple
and has SU− rank =
1, T is trivial2, T one− based, nontrivialω, T non− one− based
(generalizing Buechler’s 1991 result for s.m. structures)
If T is one-based then so is TP (Ben Yaacov, Pillay, V. 2003).

Preservation of NIP in dense/codense expansions
I Berenstein, Dolich, Onshuus (2011):T is (strongly) dependent ⇒ TP is (strongly) dependent
I T is (strongly) dependent ⇒ TH is (strongly) dependentIdea of the proof of (T NIP ⇒ TH NIP):
I Since TH has QE down to H-bounded formulas, by aChernikov-Simon’s result, it suffices to show NIP over H;
I Suppose TH has IP over H: there is an LH -formula φ(x , y),a ∈ M and an indiscernible sequence (bi : i < ω) in H(M)such that
|= φ(a, bi ) ⇐⇒ i is even.
I We can replace φ(a,H(M)n) with ψ(a′,H(M)n) where ψ is anL-formula. Then ψ witnesses IP in T , a contradiction.
I RCFG is dependent but not strongly dependent

Application of lovely pairs: a notion of linearity
What does it mean to be a linear geometric theory?
Linearity is well-defined and understood in:
I Strongly minimal theories: linearity = local modularity
I Supersimple theories of SU-rank 1: linearity = one-basedness(weaker than local modularity)
I o-minimal theories: CF-property, non-interpretability of aninfinite field

Comparing strongly minimal and o-minimal settings
strongly minimal:
I linearity = local modularity
I linearity ⇐⇒ 1-basedness (a ≡B a′, a |Ba′ ⇒ a |
a′B)
I linearity ⇐⇒ no interpretable pseudoplane
I linear+nontrivial ⇒ interpretability of infinite vector spaces
I non-local modularity 6⇒ intepretability of an infinite field
o-minimal:
I linearity = no interpretable infinite field
I local modularity ⇒ linearity
I linearity 6⇒ local modularity
I linear+nontrivial ⇒ interpretability of infinite vector spaces
In both settings, linearity ⇐⇒ any normal definable families of”plane curves” has dimension ≤ 1.
More on linearity: families of curves
Plane curve (with parameters a) in a geometric structure M is adefinable one-dimensional subset of M2:
Ca = {(x , y)|M |= φ(x , y , a1, . . . , an)} and for any (u, v) ∈ Ca,dim(uv/a) ≤ 1.
As we vary the parameters a over a definable subset of Mn we geta definable family of plane curves.

Nonlinear example
For example, y = ax2 + bx + c , where a 6= 0, is a definable familyof plane curves in (R,+, ·, 0, 1, <).
Since we are using 3 parameters (which can be chosen algebraicallyindependent), this family has dimension 3.
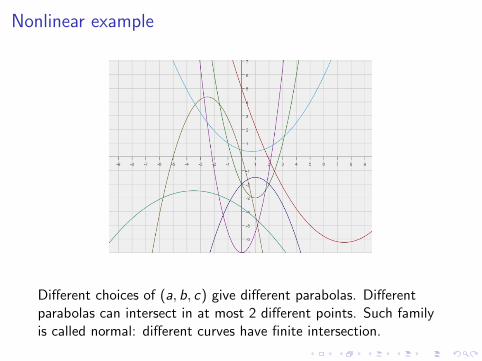
Nonlinear example
Different choices of (a, b, c) give different parabolas. Differentparabolas can intersect in at most 2 different points. Such familyis called normal: different curves have finite intersection.

Another nonlinear example
A simpler example: y = ax + b, a normal family of dimension 2(two-parameter family).

Linear example
In (R,+, 0, <) we can only form normal families of dimension ≤ 1(one-parameter families): e.g. y = (x + x) + a.
Any two-parameter family that we can create, such as
x = a ∨ y = b
ory = (x + x) + a ∨ y = (x + x) + b
will not be normal.

In search of general notion of linearity
A notion of linearity should:
I have a definition in terms of combinatorial pregeometry (someform of modularity)
I have a definition in terms of definable sets (families of planecurves)
I be equivalent to non-(type)-definability of certain complicatedstructures and/or configurations (e.g. infinite fields,pseudoplanes, quasidesigns)
I be closed under reducts
I in the nontrivial case, imply certain connection with projectivegeometries over division rings, definability of infinite groups(vector spaces)
I should have a natural extension to non-geometric context(e.g. one-basedness in stable theories)

Main challenges in the general geometric case
I doing forking calculus without canonical bases (a strong toolin strongly minimal and SU-rank 1 cases)
I no definable topology (a strong tool in o-minimal orC-minimal cases)

Generic linearity
Call a definable family of plane curves almost normal, if eachcurve has infinite intersection with only finitely many other curves.
A geometric structure M is generically linear, if any almostnormal family of plane curves in M has dimension ≤ 1.
In the strongly minimal and o-minimal cases: generic linearity =linearity .

Theorem3
The following are equivalent for any geometric theory T :
1. T is generically linear(any almost normal definable family of plane curves has dim ≤ 1)
2. T is weakly locally modular(for any a, b,C such that a ∈ acl(bC ), there exist D | abC andc ∈ acl(CD) such that a ∈ acl(bcD))
3. T is weakly 1-based(for any a,B there is a′ ≡B a with a |
Ba′ and a |
a′B)
4. T has no complete type definable almost quasidesign.(a pseudoplane-like configuration)
5. aclP = acl in any (M,P) |= TP
6. scl is modular in any (M,P) |= TP
(a ∈ scl(bC ) ⇒ there exists c ∈ scl(C ) such that a ∈ scl(bc)).
3A. Berenstein, E. Vassiliev, Weakly one-based geometric theories, J. Symb.Logic, 77, No. 2, June 2012

Connection with “classical” lionearity
Generic linearity (weak local modularity, weak 1-basedness) isequivalent to
I local modularity, in the strongly minimal case
I one-basedness, in the SU-rank 1 case
I linearity (CF-property), in the o-minimal case
I linearity as defined by F. Maalouf, in the geometric C-minimalcase
It is also closed under reducts.
Geometry of the small closure
Moreover, for a generically linear T we have:
I the geometry of acl(− ∪ P(M)) is either trivial or splits in adisjoint union of projective geometries over division rings;
I the geometry of acl is a disjoint union of subgeometries ofprojective geometries over division rings;
I if T is ω-categorical (only one countable model), nontrivialand generically linear, then TP interprets an infinite vectorspace over a finite field.
Structure induced on H : generic trivialization4
It turns out that the structure induced on H(M) keeps the“random noise” while “forgetting” the geometry of M.
Given a sufficiently saturated H-structure (M,H), consider H(M)together with traces of definable sets of M (without parameters).
Denote such structure by H∗(M), and its theory by T ∗
(generic trivialization of T ).
4A. Berenstein, E. Vassiliev, Generic trivializations of geometric theories,Math. Logic Q., 60, No. 4-5, 289-303 (2014)

Structure induced on H : generic trivialization
I T ∗ is a trivial (acl(A) = A) geometric theory, with QE
I As T ∗ is a reduct of TH and is trivial, we can expectT ”nice”⇒ T ∗ ”nice”.
I More interestingly, we often have T ∗ ”nice”⇒ T ”nice”.
I To show this we need H∗(M) to somehow ”control” M.
I Can be done by working in acl(H(M)) which is a sufficientlysaturated model of T .
I Easier when acl = dcl: any set definable over dcl(H(M)) isalso definable over H(M).

Moving parameters into H(M): when acl 6= dcl
The main tool that allows to move parameters into H(M):
Proposition
Let (M,H) be an H-structure of a geometric theory T . LetD ⊂ M be a set L-definable over acl(H(M)). Then there existsD ′ ⊂ D L-definable over H(M) such that D\D ′ is finite.

Idea of the Proof
I Let D = φ(M, a, h), where h ∈ H(M) and a ∈ acl(h),witnessed by an L-formula ψ(y , h).
I Consider all the conjugates of D over h (there are finitelymany).
I Each conjugate is cut into disjoint pieces by booleancombinations with other conjugates.
I In each infinite disjoint piece pick an element of H, say c .Then the piece is L-definable over hc by∀y(ψ(y , h)→ (φ(x , y , h)↔ φ(c , y , a))).

Properties of T ∗: strongly minimal case
Proposition
T is strongly minimal ⇐⇒ T ∗ is strongly minimal(and, thus, is the theory of equality)
Proof:⇒ clear⇐ Suppose there is an infinite co-infinite D ⊂ M definable overacl(H(M)). Choose D ′ ⊂ D, definable over H(M), with D\D ′finite. Then D ′ ∩ H(M) is definable in H∗(M) and is infinite andco-infinite.
Properties of T ∗: SU-rank 1 case
Proposition
T is supersimple SU-rank 1 ⇐⇒ T ∗ is supersimple SU-rank 1
Proof:⇒ follows from TH being supersimple and H(x) having SU-rank 1in (M,H).⇐ Assume T is not supersimple of SU-rank 1. Work overacl(H(M)). Assume φ(x , a) is a non-algebraic formula thatk-divides over ∅, witnessed by an indiscernible sequence(ai : i < |T |+).For every i < |T |+ we can find ψi (x , hi ) with hi ∈ H(M) defininga co-finite subset of φ(M, ai ). We may assume that ψi = ψ are thesame for each i and hi form an indiscernible sequence. Thenψ(x ,~h0) defines an infinite subset of H∗(M) that k-divides over ∅in T ∗, a contradiction.

Properties of T ∗: NIP case
Proposition
T is NIP ⇐⇒ T ∗ is NIP
Idea of the proof:⇒ follows from TH being NIP.⇐ Suppose T has IP witnessed by φ(x , y) and an indiscerniblesequence I = (bi : i ∈ ω) and a ∈ M (non-algebraic over I ) suchthat
|= φ(a, bi ) ⇐⇒ i even.
As in the SU-rank 1 case, we can ”pull” I into H(M).

Some questions
I If T is linear (i.e. weakly 1-based), is there a way to “recover”M from the geometry of scl and H∗(M)?
I For a geometric T , does TH have elimination of ∃∞?(true for formulas φ(x , y) that imply y ∈ H)
I Imaginaries in TH?(Dolich, Miller, Steinhorn: EI holds in o-minimal case;we also have GEI in SU-rank 1 case)
I if T is nontrivial and linear, can we interpret an infinite groupin T , or, at least, TP?
I structure of weakly 1-based groups
I weak 1-basedness beyond geometric theories?(progress by Boxall, Bradley-Williams, Kestner, Omar Aziz,Penazzi, NDJFL 2013)

THANK YOU!
Recommended












![[Vasilyev S.N.] Interpolation by Fractal Functions(BookZa.org)](https://img.pdfslide.us/doc/110x75/55cf914e550346f57b8c6b70/vasilyev-sn-interpolation-by-fractal-functionsbookzaorg.jpg)