Wireless OEP Breakout Session
David Culler & Shankar Sastry
University of California, Berkeley

6/5/2001 NEST Wireless OEP Breakout 2
Agenda
• Additional Technical Background on HW/SW platform
• Additional Technical Background on Challenge Application Development
• Identify how each project will use the platform
• Solicit platform requirement input in preparation for Aug. freeze
• Identify components that projects will contribute

6/5/2001 NEST Wireless OEP Breakout 3
NEST Program Structure
SW platform
coordination
services
synthesis
services
composition services
Challenge Application
HW platform
sensors processing communication actuators storage

6/5/2001 NEST Wireless OEP Breakout 4
NEST Program Structure – evolution
SW platform
coordination
services
synthesis
services
composition services
Challenge Application
HW platform
sensors processing communication actuators storage
year
0
1
23
Composition Open Platform
initial low-power wireless
Open Platform
100+ tiny devices for alg. dev.

6/5/2001 NEST Wireless OEP Breakout 5
Platform Background
• material provided as reference
• coverage directed by discussion

6/5/2001 NEST Wireless OEP Breakout 6
Characteristics of Network Sens/Act
• Small physical size and low power consumption• Concurrency-intensive operation
– multiple flows, not wait-command-respond
• Limited Physical Parallelism and Controller Hierarchy
– primitive direct-to-device interface– Asynchronous and synchronous devices
• Diversity in Design and Usage– application specific, not general purpose– huge device variation=> efficient modularity=> migration across HW/SW boundary
• Robust Operation– numerous, unattended, critical=> narrow interfaces
sensorsactuators
network
storage

6/5/2001 NEST Wireless OEP Breakout 7
HW Platforms
• Current: SmartDust MacroMOTE => Renes =>
• Phase 1: 6 months => algorithm studies– Mote++, MEMS sensors, TinyOS
– more microcontroller
» atmega163 => 2x storage
» atmega103 => 128K flash, 4k ram
» TIMSP430 => 60k flash, 2k ram, HW *, ...
» many subtle factors
– RFM with ASH
» too early for bluetooth
– 100+ nodes for < 20K$
• Phase 2: 30 months => composition of alg’s– ARM-power, Bluetooth physical
– integrated system
– OS??

6/5/2001 NEST Wireless OEP Breakout 8
Isun Motherboard: Processor Core
• Atmel AVR• Clock speed: 4 MHz• Memory
– 8 Kbytes of program memory (flash)– 512 bytes of data RAM– 512 bytes of EEPROM on chip (write: 4 ms/byte)– 32 8 bit registers
• IO capabilities– 32 general purpose IO lines
» Some lines also serve more specialized purposes, e.g. UART» 10-bit 8-channel ADC
– Connector interface means that the IO lines serve a more specific purposes
• Interrupts– No interrupt queuing
• 256K EEPROM secondary store over I2C

6/5/2001 NEST Wireless OEP Breakout 9
Radio Circuit
• RFM Monolithics TR1000 916 MHz radio – On/off keying at 10 kbps (max. 19.2 kbps)
– Capable of 115 kbps using amplitude shift keying
– Capable of turning on in 30 us
• Processor interface– Raw, unbuffered access to transmit (RFM TX) and receive (RFM RX)
» TX current => signal strength
– Requires DC balanced signal – an equal number of 1’s and 0’s in the signal
– Sampling on reception and modulating on transmission done is software
» Too much noise in received signal to use UART for sampling
• Signal-strength Sensing and Control

6/5/2001 NEST Wireless OEP Breakout 10
Expansion Connector
• Documented hardware interface– Swap components on either side of the connector while
preserving investment in sensors or main boards
• Sensor interfaces– 4 lines dedicated to switching components on and off– 7 analog voltage sensing lines– 2 I2C busses– SPI– UART lines
• Debugging aids– All radio-related signals: RX, TX, base band, control signals, signal
strength
• Programming interfaces– SPI and reset signals for the main processor and the coprocessor
• Ground, Vcc for both analog and digital circuits• 12 lines reserved for future use

6/5/2001 NEST Wireless OEP Breakout 11
Sensor Boards
• Basic Sensor Proto– Photo resistor – PW1 and ADC1
– Thermistor – PW2 and ADC2
– Prototyping area
• Vibration Sensor– Photo resistor: PW1 and ADC1
– Thermistor: PW4, ADC6
– 2 axis accelerometer: ADC2 and 3, PW2
– Digital temperature: I2C Bus 1
• 2 axis magnetometer– Convert magnetic fields into a differential output
– Field range -2 to +2 gauss
– Sensitivity 3.2mV/V/gauss
– Resolution: 27gauss at 10Hz
– Bandwidth: 5MHz

6/5/2001 NEST Wireless OEP Breakout 12
Basic Power Breakdown…
• But what does this mean?– Lithium Battery runs for 35 hours at peak load and year at
minimum load!
– A one byte transmission uses the same energy as approx 11000 cycles of computation.
– Idleness is not enough, sleep!
» short and long control loops
Active Idle Sleep
CPU 5 mA 2 mA 3 μA
Radio 7 mA (TX) 4.5 mA (RX) 12 μA*
EE-Prom 3 mA 0 0
LED’s 4 mA 0 0
Photo Diode 200 μA 0 0
Temperature 200 μA 0 0
Panasonic CR2354
560 mAh
* 10 uA for Dallas digital pot

6/5/2001 NEST Wireless OEP Breakout 13
A Operating System for Tiny Devices?
• Traditional approaches– command processing loop (wait request, act, respond)
– monolithic event processing
– bring full thread/socket posix regime to platform
• Alternative– provide framework for concurrency and modularity
– never poll, never block
– interleaving flows, events, energy management
– allow appropriate abstractions to emerge

6/5/2001 NEST Wireless OEP Breakout 14
Tiny OS Concepts
• Scheduler + Graph of Components
– constrained two-level scheduling model: threads + events
• Component:– Commands, – Event Handlers– Frame (storage)– Tasks (concurrency)
• Constrained Storage Model– frame per component, shared stack, no
heap
• Very lean multithreading• Efficient Layering
Messaging Component
init
Po
we
r(m
od
e)
TX
_p
ack
et(
bu
f)
TX
_p
ack
et_
do
ne
(s
ucc
ess
)RX
_p
ack
et_
do
ne
(b
uff
er)
Internal
State
init
po
we
r(m
od
e)
sen
d_
msg
(ad
dr,
ty
pe
, d
ata
)
msg
_re
c(ty
pe
, d
ata
)
msg
_se
nd
_d
on
e)
internal thread
Commands Events

6/5/2001 NEST Wireless OEP Breakout 15
Application = Component Graph
RFM
Radio byte
Radio Packet
UART
Serial Packet
ADC
Temp photo
Active Messages
clocks
bit
by
tep
ac
ke
t
Route map router sensor appln
ap
pli
ca
tio
n
HW
SW
Example: ad hoc, multi-hop routing of photo sensor readings

6/5/2001 NEST Wireless OEP Breakout 16
Storage Breakdown (C Code)
0
500
1000
1500
2000
2500
3000
3500
4000
Multihop Router
AM light
AM Temp
AM
Packet
Radio Byte
RFM
Photo
Temp
UART Packet
UART
i2c
Init
TinyOS Scheduler
C Runtime
3450 B code 226 B data

6/5/2001 NEST Wireless OEP Breakout 17
DARPA 29 palms demo
• UAV drops nodes along road,– hot-water pipe insulation for package
• Nodes self configure into linear network
• Calibrate magnetometers
• Each detects passing vehicle
• Share filtered sensor data with 5 neighbors
• Each calculates estimated direction & velocity
• Share results
• As plane passes by, – joins network
– upload as much of missing dataset as possible from each node when in range
• 7.5 KB of code!

6/5/2001 NEST Wireless OEP Breakout 18
TOS Execution Model
• commands request action– ack/nack at every boundary
– call cmd or post task
• events notify occurrence– HW intrpt at lowest level
– may signal events
– call cmds
– post tasks
• Tasks provide logical concurrency
– preempted by events
• Migration of HW/SW boundary
RFM
Radio byte
Radio Packet
bit
by
tep
ac
ke
t
event-driven bit-pump
event-driven byte-pump
event-driven packet-pump
message-event driven
active message
application comp
encode/decode
crc
data processing

6/5/2001 NEST Wireless OEP Breakout 19
Dynamics of Events and Threads
bit event filtered at byte layer
bit event => end of byte =>
end of packet => end of msg send
thread posted to start
send next message
radio takes clock events to detect recv

6/5/2001 NEST Wireless OEP Breakout 20
Event-Driven Sensor Data
• clock event handler initiates data collection• sensor signals data ready event• data event handler calls output command• common pattern
char TOS_EVENT(SENS_OUTPUT_CLOCK_EVENT)(){
return TOS_CALL_COMMAND(SENS_GET_DATA)();
}
char TOS_EVENT(SENS_DATA_READY)(int data){
return TOS_CALL_COMMAND(SENS_OUTPUT_OUTPUT)((data >> 2) &0x7);
}

6/5/2001 NEST Wireless OEP Breakout 21
Component Composition
include modules{MAIN;SENS_OUTPUT;INT_TO_LEDS;CLOCK;PHOTO;};
MAIN:MAIN_SUB_INIT SENS_OUTPUT:SENS_OUTPUT_INIT MAIN:MAIN_SUB_START SENS_OUTPUT:SENS_OUTPUT_START
SENS_OUTPUT:SENS_OUTPUT_CLOCK_EVENT CLOCK:CLOCK_FIRE_EVENTSENS_OUTPUT:SENS_OUTPUT_SUB_CLOCK_INIT CLOCK:CLOCK_INIT
SENS_OUTPUT:SENS_OUTPUT_SUB_OUTPUT_INIT INT_TO_LEDS:INT_TO_LEDS_INITSENS_OUTPUT:SENS_OUTPUT_OUTPUT_COMPLETE INT_TO_LEDS:INT_TO_LEDS_DONESENS_OUTPUT:SENS_OUTPUT_OUTPUT INT_TO_LEDS:INT_TO_LEDS_OUTPUT
SENS_OUTPUT:SENS_DATA_INIT PHOTO:PHOTO_INITSENS_OUTPUT:SENS_GET_DATA PHOTO:PHOTO_GET_DATASENS_OUTPUT:SENS_DATA_READY PHOTO:PHOTO_DATA_READY
CLOCK INT_TO_LEDS
MAIN
SENS_OUTPUT
LED
hardware.h
PHOTO

6/5/2001 NEST Wireless OEP Breakout 22
TinyOS Execution Contexts
Hardware
Interrupts
eve
nts
commands
Tasks

6/5/2001 NEST Wireless OEP Breakout 23
Typical application use of tasks
• event driven data acquisition
• schedule task to do computational portion
char TOS_EVENT(MAGS_DATA_EVENT)(int data){
struct adc_packet* pack = (struct adc_packet*)(VAR(msg).data);
printf("data_event\n");
VAR(reading) = data;
TOS_POST_TASK(FILTER_DATA);
...
mags.c

6/5/2001 NEST Wireless OEP Breakout 24
Filter Magnetometer Data TaskTOS_TASK(FILTER_DATA){ int tmp; VAR(first) = VAR(first) - (VAR(first) >> 5); VAR(first) += VAR(reading); VAR(second) = VAR(second) - (VAR(second) >> 5); VAR(second) += VAR(first) >> 5; VAR(diff) = VAR(diff)-(VAR(diff) >> 5); tmp = VAR(first) - VAR(second); if(tmp < 0) tmp = -tmp; VAR(diff) += tmp; if((VAR(diff) >> 5) > 85){ TOS_CALL_COMMAND(MAGS_LEDg_on)(); VAR(led_on) = 255; }}• 128 Hz sampling rate• simple FIR filter• dynamic software tuning for centering the magnetometer signal (1208 bytes)
• digital control of analog, not DSP• ADC (196 bytes)

6/5/2001 NEST Wireless OEP Breakout 25
Tasks in low-level operation
• transmit packet– send command schedules task to calculate CRC– task initiated byte-level datapump– events keep the pump flowing
• receive packet– receive event schedules task to check CRC– task signals packet ready if OK
• byte-level tx/rx– task scheduled to encode/decode each complete byte– must take less time that byte data transfer
• i2c component– i2c bus has long suspensive operations– tasks used to create split-phase interface– events can procede during bus transactions

6/5/2001 NEST Wireless OEP Breakout 26
Active Messages• Sending
– Declare buffer storage in a frame– Request Transmission– Naming a handler– Handle Completion signal
• Receiving– Declare a handler– Firing a handler
» automatic upon arrival of corresponding message» behaves like any other event
• Buffer management– strict ownership exchange– tx: done event => reuse– rx: must rtn a buffer– built-in wrapper
TOS_FRAME_BEGIN(INT_TO_RFM_frame) {
char pending;
TOS_Msg msg;
}
TOS_FRAME_END(INT_TO_RFM_frame);

6/5/2001 NEST Wireless OEP Breakout 27
Send Messagechar TOS_COMMAND(INT_TO_RFM_OUTPUT)(int val){
int_to_led_msg* message = (int_to_led_msg*)VAR(msg).data;
if (!VAR(pending)) {
message->val = val;
if (TOS_COMMAND(INT_TO_RFM_SUB_SEND_MSG)(TOS_MSG_BCAST, AM_MSG(INT_READING), &VAR(msg))) {
VAR(pending) = 1;
return 1;
}
}
return 0;
}
msg buffer
access appln msg buffer
cast to defined format
mark busy
application specific ready check
build msg
request transmission
destination identifier
get handler identifier

6/5/2001 NEST Wireless OEP Breakout 28
Completion Event
• Underlying message layer notifies all sending components of completion event
– may need to resume activity after other’s completion
– provides reference to sent buffer to identify action
• Here event propagated as output done
char TOS_EVENT(INT_TO_RFM_SUB_MSG_SEND_DONE)(TOS_MsgPtr sentBuffer){
if (VAR(pending) && sentBuffer == &VAR(data)) {
VAR(pending) = 0;
TOS_SIGNAL_EVENT(INT_TO_RFM_COMPLETE)(1);
return 1;
}
return 0;
}

6/5/2001 NEST Wireless OEP Breakout 29
Challenge Application Developmetn
• Specification of challenge application is a process
• layout how coordination and synthesis services plug in
• develop platform requirements
• Consider sequence of applications
– interactive spaces
– flock of model cars
– Multi-agent pursuit-evasion

6/5/2001 NEST Wireless OEP Breakout 30
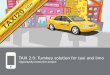
Challenge App: pursuer/evader contest
obstacles
evader
UAVs
active markers
UAVs (pursuers) capable of:* flying between obstacles * seeing a limited region* placing active markers
Terrain: with obstacles* not accurately mapped
Evader capable of:* moving between obstacles (possibly
actively avoiding detection)
Active Markers:* form sensor field

6/5/2001 NEST Wireless OEP Breakout 31
obstacles
evader
UAVs
UAVs (pursuers) capable of:* flying between obstacles * seeing a region around them
(limited by the occlusions)
Terrain: * with fixed obstacles* not accurately mapped
The “rules” of the game
Evader capable of:* moving between obstacles
(possibly actively avoiding detection)
Objective:find the evader in minimum time

6/5/2001 NEST Wireless OEP Breakout 32
LaValle, Latombe, Guibas, et al. considered a similar problem but assume the map of the region is known, the pursuers have perfect sensors, and worst case trajectories for the evaders:
How many UAVs are needed to win the game in finite time?
1 agent is sufficient 2 agents are needed(no matter what strategy a single pursuer
chooses, there is a trajectory for the evader that avoids detection)
Strategies for pursuit-evasion games

6/5/2001 NEST Wireless OEP Breakout 33
Deng, Papadimitriou, et al., study the problem of building a map (seeing all points in the region) traversing the smallest possible distance.
standard “keep wall to the right” algorithm
algorithm that takes better advantage of the cameras capabilities
Exploring a region to build a map

6/5/2001 NEST Wireless OEP Breakout 34
A two step solution…
• exploration followed by pursuit is not efficient
• sensors are imprecise
• worst case assumptions the trajectories of the evaders leads to very conservative results
expl
orat
ion
purs
uit

6/5/2001 NEST Wireless OEP Breakout 35
A different approach…
Use a probabilistic framework to combine exploration and pursuit-evasion games.
Non determinism comes from:• poorly mapped terrain• noise and uncertainty in the sensors• probabilistic models for the motion of
the evader and the UAVs
expl
orat
ion
purs
uit

6/5/2001 NEST Wireless OEP Breakout 36
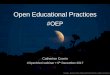
Markov Decision Processes
statestate xt := {1 ,2 ,…, 16}actionaction ut := {up, down, left, right}
timetime t {1, 2, 3,…}
transition probability functiontransition probability function p(x,x’,u) = P(xt+1=x’ | xt=x, ut=u)
control policycontrol policy (stochastic) : [0,1] P(ut= u| xt=x, ) = (u, x)
ux
uxxu tt )0
)1,|P
xu
control policycontrol policy (deterministic) : ut = (xt)
(almost surely)
.1|right
1 2 3
5 6
.7|right
.1|right
.1|right
…
4
xgoal21
…
16
4
5

6/5/2001 NEST Wireless OEP Breakout 37
Markov Decision Processescostcost J = E[Tgoal | ] (to be minimize)
optimal control policyoptimal control policy *
J* = min J
1
),(Et
ttlJ ux
x
xuxl
0
1,with 0
(additive)
where Tgoal := min {t : xt = xgoal}
one can also write
xgoal21
…
16
4
5
1 2 3
5 6
.7|right
.1|right
.1|right
…
4
Ø
1|-
1|-
.1|right

6/5/2001 NEST Wireless OEP Breakout 38
Sub-optimal policies
Q: How does one evaluate which control action will maximize the probability of finding the evader?
greedy policygreedy policy (+) pursuit policy that, at each instant, maximizes the probability of finding the evader at the next time instant

6/5/2001 NEST Wireless OEP Breakout 39
Sub-optimal policies
probabilistic map for the position of the evader
Q: How does one evaluate which control action will maximize the probability of finding the evader?
A: By keeping track of the probability of the evader being at each possible position
Ytt Y|P 1β
greedy policygreedy policy (+) pursuit policy that, at each instant, maximizes the probability of finding the evader at the next time instant

6/5/2001 NEST Wireless OEP Breakout 40
Problem:For given paths of several UAVs, how to fuse the data sensed by each of them (in real-time) to build a global map?
Map building

6/5/2001 NEST Wireless OEP Breakout 41
Probabilistic map building
Bayes’ rule
Problem:For given paths of several UAVs, how to fuse the data sensed by each of them (in real-time) to build a global map?

6/5/2001 NEST Wireless OEP Breakout 42
How each project will use the platform
• ...

6/5/2001 NEST Wireless OEP Breakout 43
What components will be contributed
• ...

6/5/2001 NEST Wireless OEP Breakout 44
What you’d like to see in the platform
• ...
Recommended