Transforming C(s) into c(t):
Negative Feedback Control with Proportional Only Controller
Jigsaw Team EstrogenStephanie WilsonAmanda NewmanJessica Raymond
(We Laplace Transforms)

Goal: Advantages and disadvantages of different t0 (dead time) values
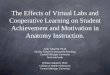
System: Any FOPDT system in a negative feedback loop
with a Proportional-Only Controller

From Block Diagram Algebra…
stc
stc
stc
stc
KeKs
KeK
s
KeKs
KeK
sR
sC0
0
0
0
)1(
11
1 )(
)(
CLTF:
Negative feedback control loop for
FOPDT system with P-only controller

With Pade’s Approximation…
)2
1(
)2
1()1(
)2
1(
)2
1(
)(
)(
0
0
0
0
st
st
KKs
st
st
KK
sR
sC
c
c
)2
1(
)2
1(
0
0
0
st
st
e st
Pade’s
Approximation:
CLTF:

This Reduces to…
sKKst
KKt
st
st
KKsC
cc
c 1
1)22
(2
)2
1()(
0020
0
)2
1()1)(2
1(
)2
1(
)(
)(
00
0
st
KKsst
st
KK
sR
sC
c
c
Therefore…
CLTF:

Final Value Theorem
sKKst
KKt
st
st
KKs
cc
c
s
1
1)22
(2
)2
1( lim
0020
0
0
Value S. S. )( lim0
sCssIn Laplace Domain
0
0
0KKc
KKc1

Now for C(t)…
sKKst
KKt
st
st
KKsC
cc
c 1
1)22
(2
)2
1()(
0020
0
)1)22
(2
( 0020 KKst
KKt
st
cc
First we must simplify the denominator…
for partial fraction decomposition
CE:

Substitute for Easier Math…
KKst
KKt
st
cc 1 )22
( 2
0020
m p q
0
2
2
m
qs
m
ps
qpsms
CE:

Now Complete the Square
0 2 m
qs
m
ps
0 2 m
qs
m
ps
m
q
m
p()
m
ps )
4
2(
2
22
m
q
m
p()
m
ps 22 )
2
2(
)4
4()
4
2( 2
2
22
m
m
m
q
m
p()
m
ps
2
1 2)m
p(
2
1 2)m
p(
22
22
4
4)
4
2(
m
mq
m
p()
m
ps

)4
4
2(
2
22
m
mqp()
m
ps
1
44
)2
(
)2
1()( 2
2
0
mpmq
mp
sm
st
KKsC
c
s
C
mpmq
mp
sm
Bmp
sA
44
)2
(
)2
( 2
2
sKKst
KKt
st
st
KKsC
cc
c 1
1)22
(2
)2
1()(
0020
0
m
m
pmq
m
PsmCBss
m
PsAs
tKK c 4
4
2221
2220 )()(
s

qpsmsCBssm
PsAs
tKK c
220
221 )(
Simplify the last term
CqsCpBm
ApsCmAs
tKKKK cc
22
20
Distribute the left sideFactor the right

Solve for C
KKCq c
q
KKC c

Solve for A
0CmA
q
KmKA c
CmA

Solve for B
q
p
q
ptKKB oc 2
2
2
Cpm
AptKKB oc
22
22o
c
tKKCpB
m
Ap
q
ptKKB oc 2

Substitute for m, p, q
KK
tKK
tt
KKBc
oc
o
oc 12
22(
2
KK
tKK
Ac
oc
1
2
KK
KKC
c
c
1
KKst
KKt
st
cc 1 )22
( 2
0020
m p q

Separate the terms
s
C
m
pmq
m
psm
B
m
pmq
m
psm
m
PsA
sC
4
4)
2(
4
4)
2(
)2
()( 2
2
2
2
s
C
mpmq
mp
sm
Bmp
sAsC
44
)2
(
)2
( )( 2
2

Manipulate…
sC
m
pqmmp
s
m
pmq
m
pmqm
B
24
242)2
(
24
24
24
2424m
2p4mq2
2mp
s
2mp
s
mA
C(s)
s
C
m
pmq
m
psm
B
m
pmq
m
psm
m
PsA
sC
4
4)
2(
4
4)
2(
)2
()( 2
2
2
2
to Fit Page 15 Formulas…

Ctm
pmqe
mpmq
m
Bmt
m
pmqe
m
Au(t)(C(s))
tm
pt
m
p
2
22
2
22
22
4
4sin
444
4cos-L
Inverse LaPlace Transform

Substitute A, B, C, m, p, q back into C(t)
KK
KK
t
tKK
tKKt
tec
ccc
tt
tKK
tc
122
12sin
220
2
000
22
0
00
220
2
000
0
00
0
220
2
000
22
0
0
2212
2
1222
22212
cos
2
12
)()(0
00
t
tKK
tKKt
t
KK
tKK
tt
KK
tt
tKK
tKKt
etKK
tKK
tutC
cc
c
c
ccct
t
tKK
t
c
c c

KK
KKt
t
tKK
tKKt
ec
ccc
tt
tKK
tc
122
12sin
220
2
000
22
0
00
220
2
000
0
00
0
220
2
000
22
0
0
2212
2
1222
22212
cos
2
12
)()(0
00
t
tKK
tKKt
t
KK
tKK
tt
KK
tt
tKK
tKKt
etKK
tKK
tutC
cc
c
c
ccct
t
tKK
t
c
c c
Final Value Theorem
KK
KK
c
c
1
Value S. S. )( lim
tCt
In Time Domain
0
0

CONCLUSION
Advantages of Increased t0
Reaches steady state faster Larger values of stable operating gain Bigger gain is better
Disadvantages of Increased t0
Increase in t0 results in a decrease in the ultimate 0 0gain of the loop (Kcu) Poor performance Limited values of stable operating gain
Recommended