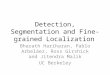
The Visual Recognition MachineThe Visual Recognition Machine
Jitendra Malik
University of California at Berkeley
Jitendra Malik
University of California at Berkeley
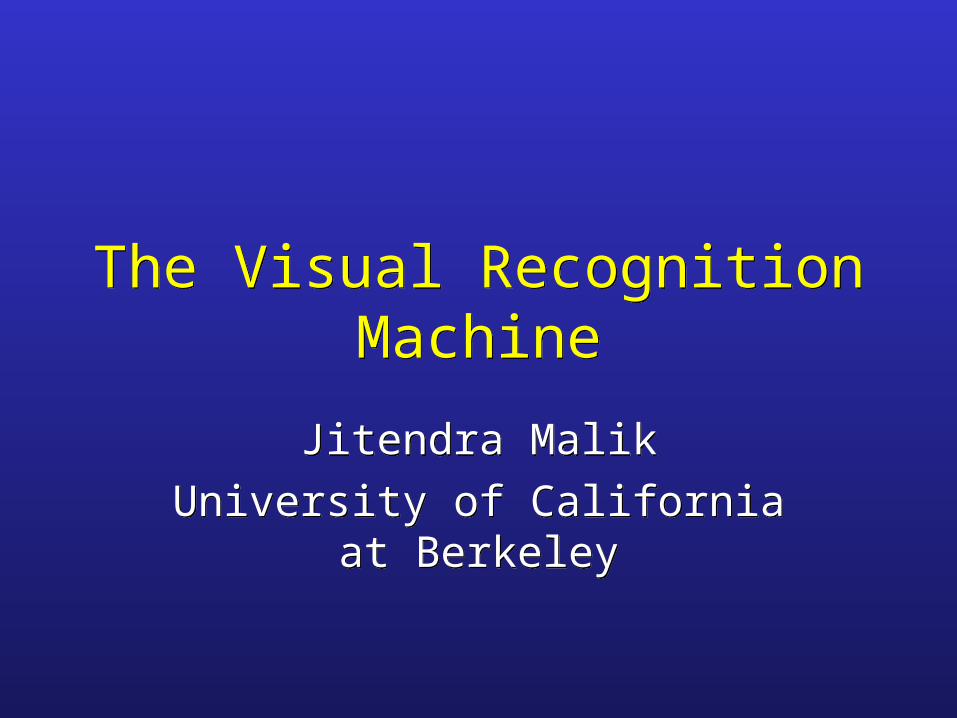
From images to objectsFrom images to objects
Labeled sets: tiger, grass etc
RecognitionRecognition
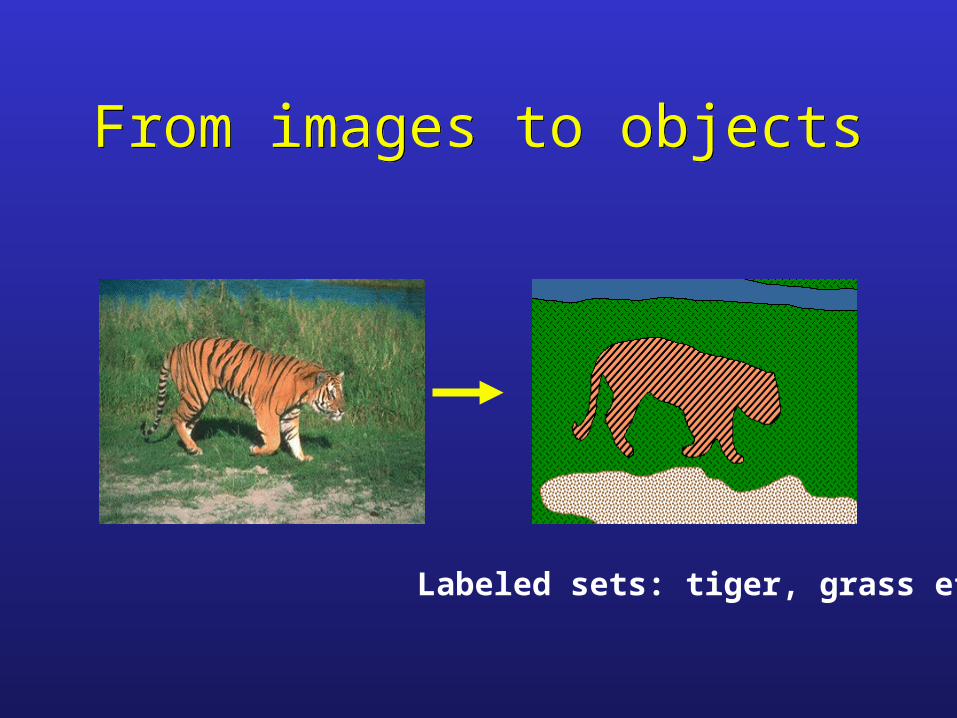
• Possible for both instances or object classes (Mona Lisa vs. faces or Beetle vs. cars)
• Tolerant to changes in pose and illumination
Three stagesThree stages
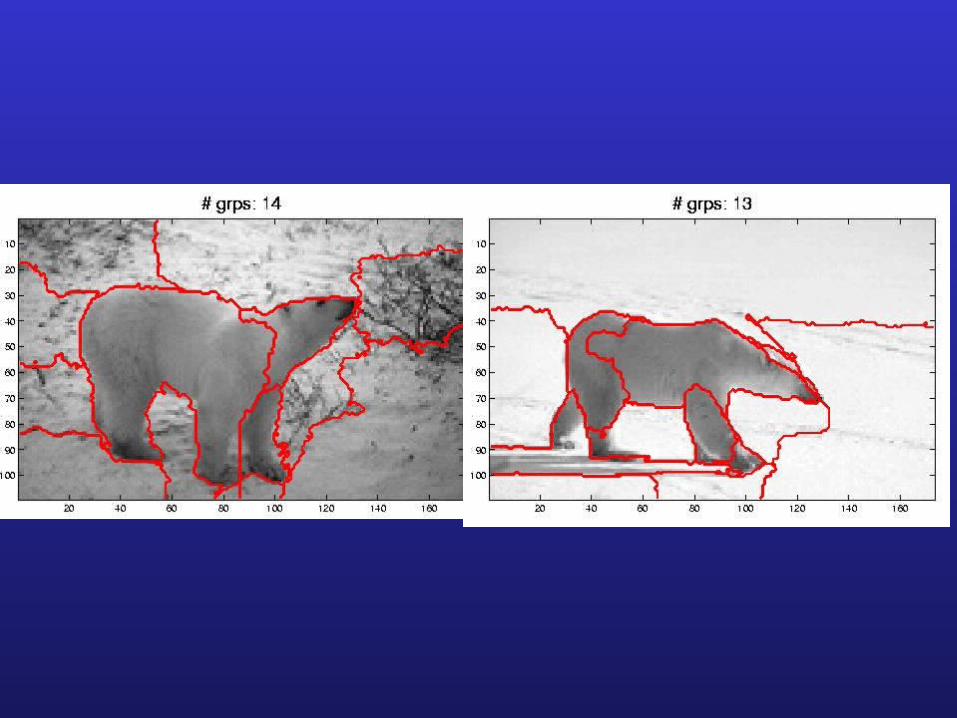
• Segmentation: Images Regions
• Association: Regions Super-regions
• Matching: Super-regions Prototype views
• Segmentation: Images Regions
• Association: Regions Super-regions
• Matching: Super-regions Prototype views
Three stagesThree stages
• Segmentation: Images Regions
• Association: Regions Super-regions
• Matching: Super-regions Prototype views
• Segmentation: Images Regions
• Association: Regions Super-regions
• Matching: Super-regions Prototype views
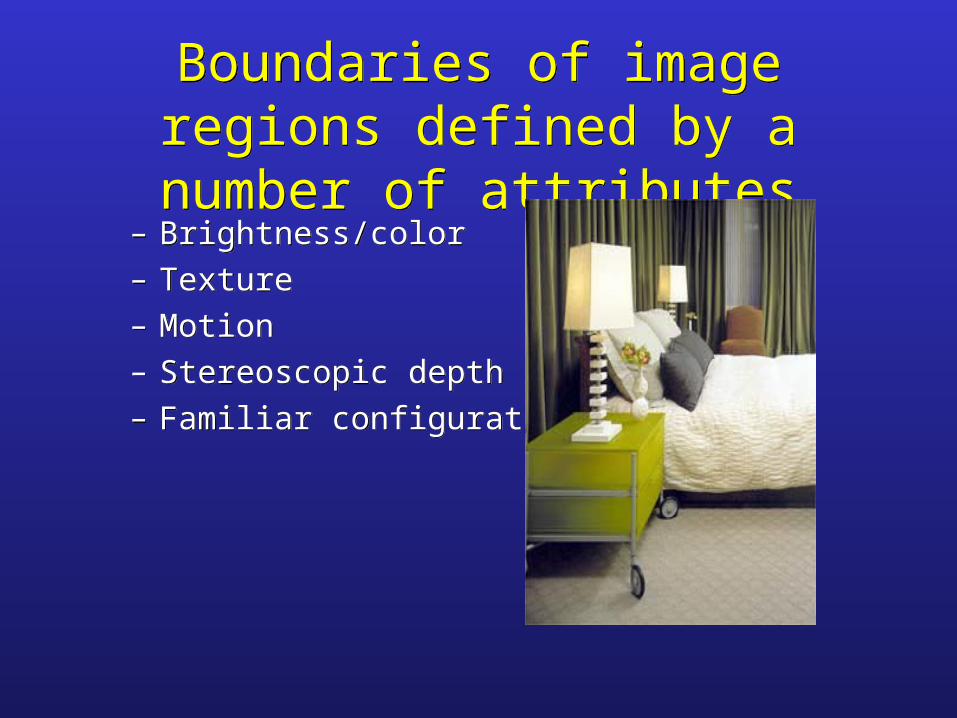
Boundaries of image regions defined by a number of attributes
Boundaries of image regions defined by a number of attributes
– Brightness/color
– Texture
– Motion
– Stereoscopic depth
– Familiar configuration
– Brightness/color
– Texture
– Motion
– Stereoscopic depth
– Familiar configuration
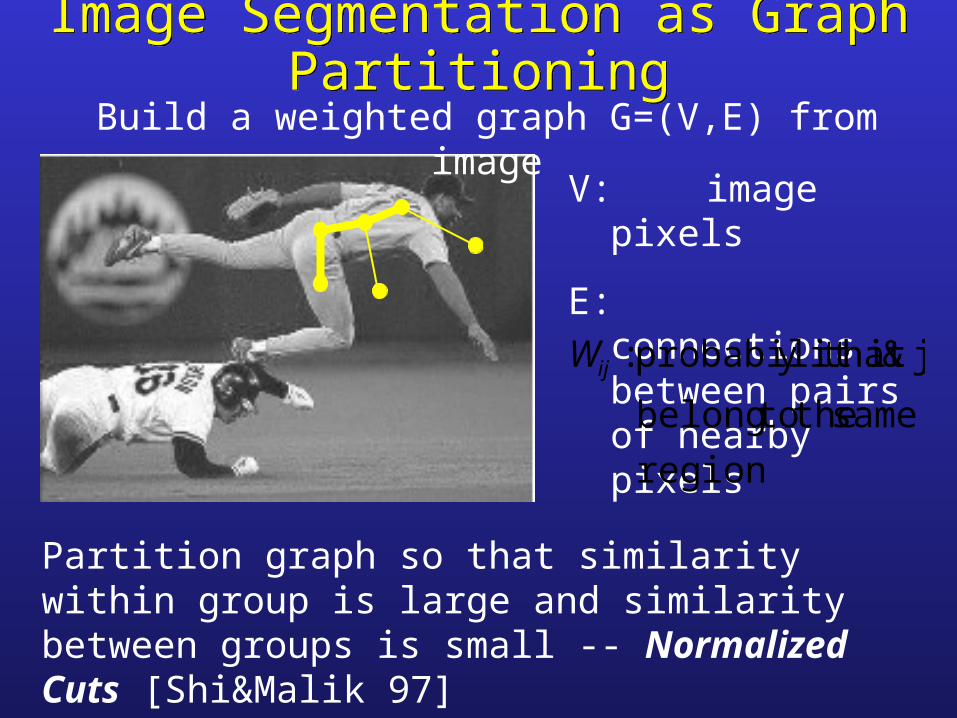
Image Segmentation as Graph PartitioningImage Segmentation as Graph PartitioningBuild a weighted graph G=(V,E) from image
V: image pixels
E: connections between pairs of nearby pixels
region
same the tobelong
j& iy that probabilit :ijW
Partition graph so that similarity within group is large and similarity between groups is small -- Normalized Cuts [Shi&Malik 97]
Some Terminology for Graph Partitioning
Some Terminology for Graph Partitioning
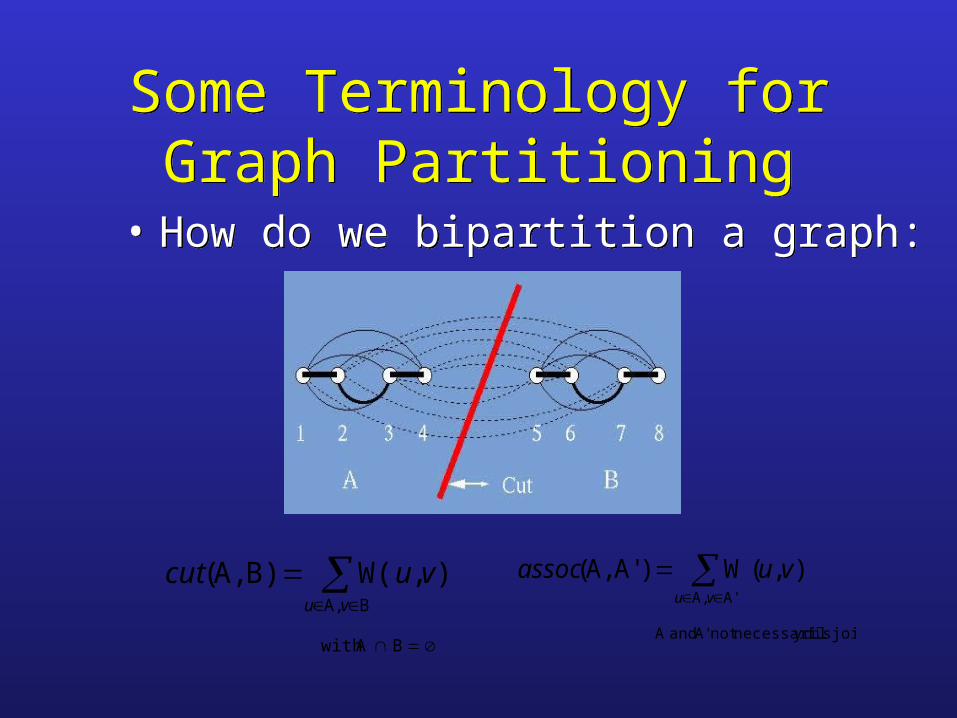
• How do we bipartition a graph:• How do we bipartition a graph:
BAwith
BA,
),,W(B)A,(vu
vucut
disjointy necessarilnot A' andA
A'A,
),(W)A'A,(
vu
vuassoc
Normalized Cut, A measure of dissimilarity
Normalized Cut, A measure of dissimilarity
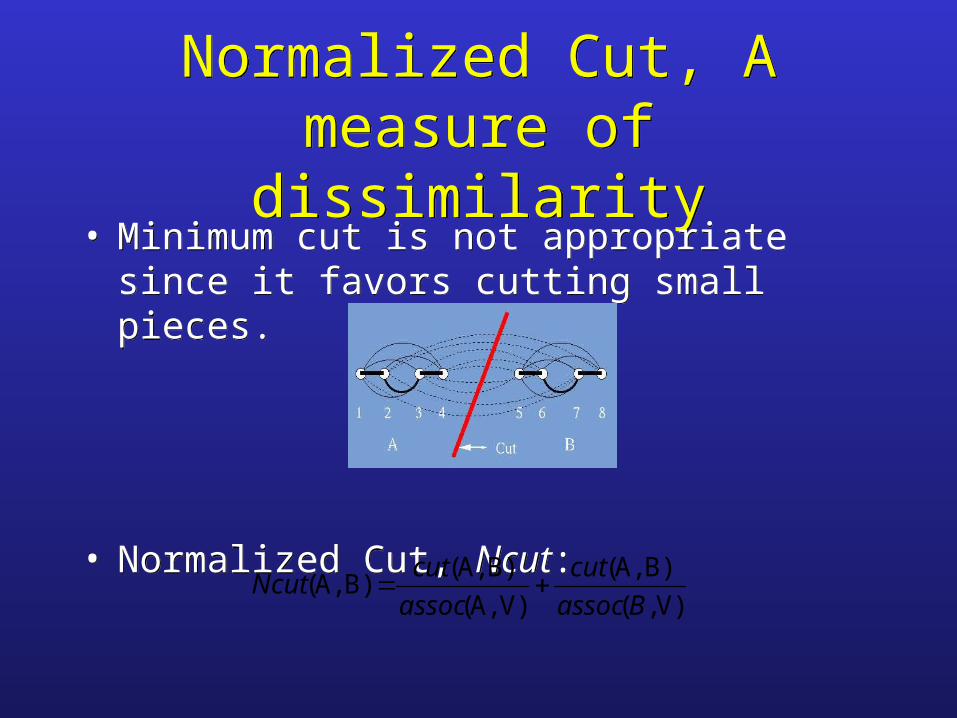
• Minimum cut is not appropriate since it favors cutting small pieces.
• Normalized Cut, Ncut:
• Minimum cut is not appropriate since it favors cutting small pieces.
• Normalized Cut, Ncut:
V),(
B)A,(
V)A,(
B)A,( B)A,(
Bassoc
cut
assoc
cutNcut

Solving the Normalized Cut problem
Solving the Normalized Cut problem
• Exact discrete solution to Ncut is NP-complete even on regular grid,– [Papadimitriou’97]
• Drawing on spectral graph theory, good approximation can be obtained by solving a generalized eigenvalue problem.
• Exact discrete solution to Ncut is NP-complete even on regular grid,– [Papadimitriou’97]
• Drawing on spectral graph theory, good approximation can be obtained by solving a generalized eigenvalue problem.
Normalized Cut As Generalized Eigenvalue problem
Normalized Cut As Generalized Eigenvalue problem
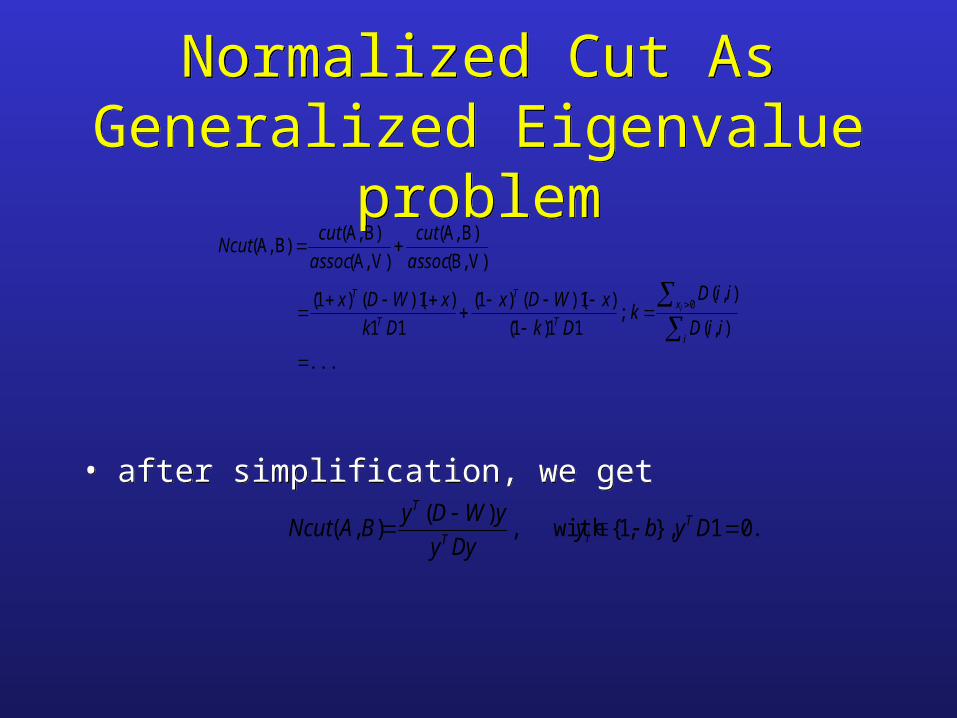
• after simplification, we get• after simplification, we get
...
),(
),( ;
11)1(
)1)(()1(
11
)1)(()1(
)VB,(
)BA,(
)VA,(
B)A,(B)A,(
0
i
x
T
T
T
T
iiD
iiDk
Dk
xWDx
Dk
xWDx
assoc
cut
assoc
cutNcut
i
.01},,1{ with ,)(
),(
DybyDyy
yWDyBANcut T
iT
T
Computational AspectsComputational Aspects
• Solving for the generalized eigensystem:
• (D-W) is of size , but it is sparse with O(N) nonzero entries, where N is the number of pixels.
• Using Lanczos algorithm.
• Solving for the generalized eigensystem:
• (D-W) is of size , but it is sparse with O(N) nonzero entries, where N is the number of pixels.
• Using Lanczos algorithm.
.D where,W)D-D(D
DW)-(D
2
1
2
1-
2
1-
xzzz
xx
NN
Three stagesThree stages
• Segmentation: Images Regions
• Association: Regions Super-regions
• Matching: Super-regions Prototype views
• Segmentation: Images Regions
• Association: Regions Super-regions
• Matching: Super-regions Prototype views
AssociationAssociation
• Number of super-regions of size k in image with n regions is approximately (4**k)*n/k
• For typical images, this ranges between 1000 and 10000
• Plausibility ordering could reduce effective number substantially
• Computing time for this stage negligible
• Number of super-regions of size k in image with n regions is approximately (4**k)*n/k
• For typical images, this ranges between 1000 and 10000
• Plausibility ordering could reduce effective number substantially
• Computing time for this stage negligible
Three stagesThree stages
• Segmentation: Images Regions
• Association: Regions Super-regions
• Matching: Super-regions Prototype views
• Segmentation: Images Regions
• Association: Regions Super-regions
• Matching: Super-regions Prototype views
Matching Matching
• Objects are represented by a set of prototypical views (~10 per object)
• For each super-region S, calculate probability that it is an instance of view V
• Determine most probable labeling of image into objects
• Objects are represented by a set of prototypical views (~10 per object)
• For each super-region S, calculate probability that it is an instance of view V
• Determine most probable labeling of image into objects

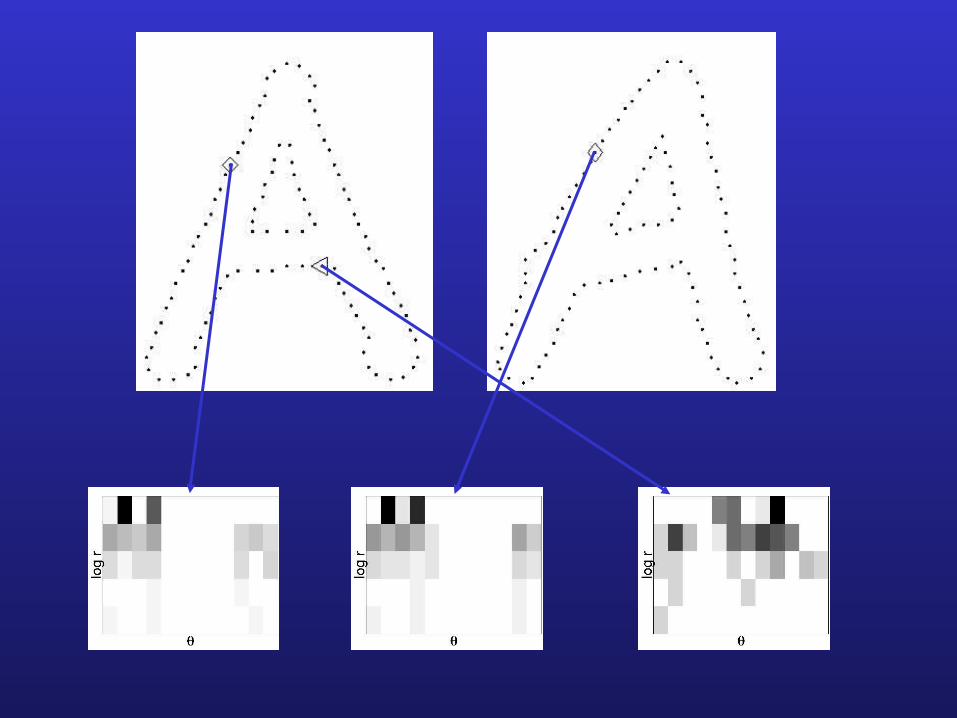
Matching super-regions to viewsMatching super-regions to views
• Based on color, texture and shape similarity• Color, texture matching is relatively well
understood and fast• Shape matching is difficult because the
algorithm should tolerate pose, illumination and intra-category variation
• GOAL: small misclassification error with few views.
• Based on color, texture and shape similarity• Color, texture matching is relatively well
understood and fast• Shape matching is difficult because the
algorithm should tolerate pose, illumination and intra-category variation
• GOAL: small misclassification error with few views.
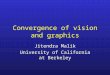
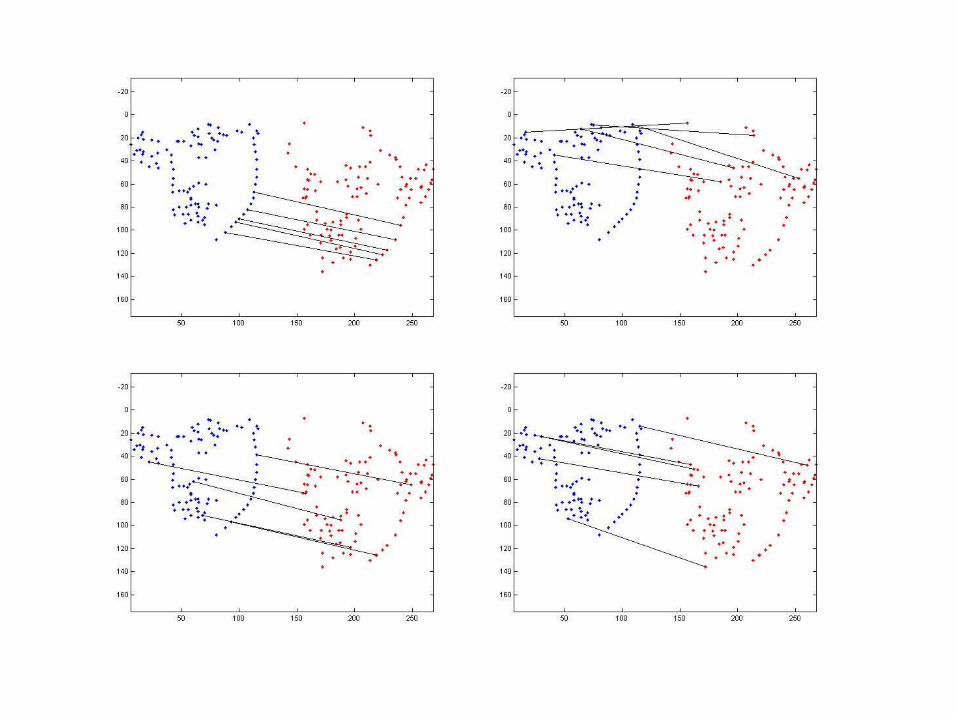
Core ideaCore idea
• Find corresponding points on the two shapes and use those to deform prototype into alignment
• Allowing this flexibility reduces number of prototype views needed
• Find corresponding points on the two shapes and use those to deform prototype into alignment
• Allowing this flexibility reduces number of prototype views needed
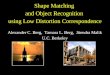
MNIST Handwritten Digits
Digit Prototypes
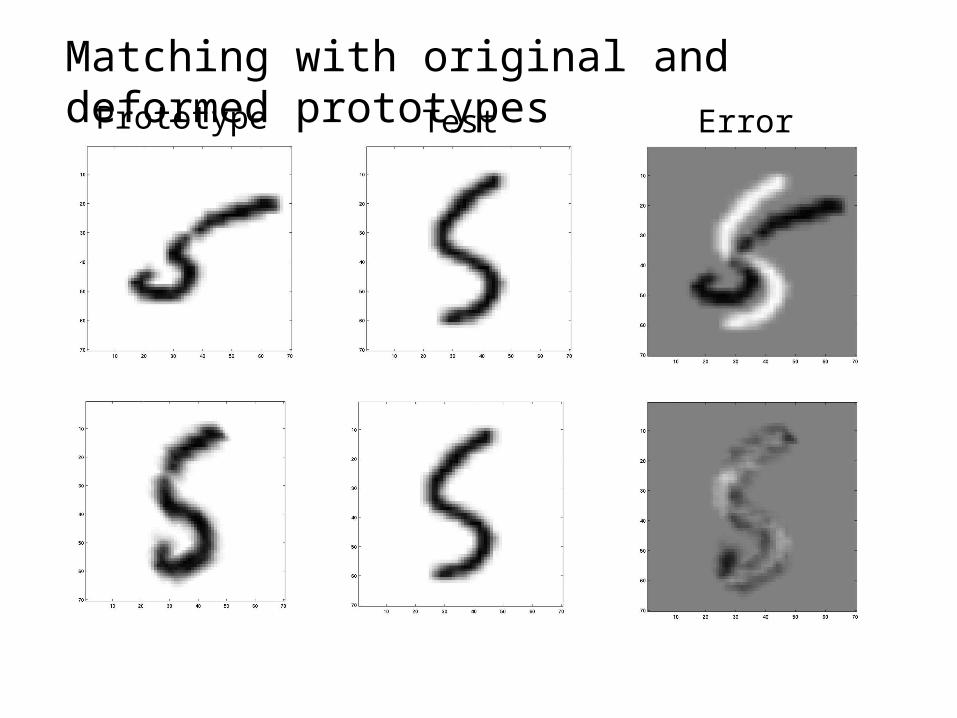
Matching with original and deformed prototypesPrototype Test Error
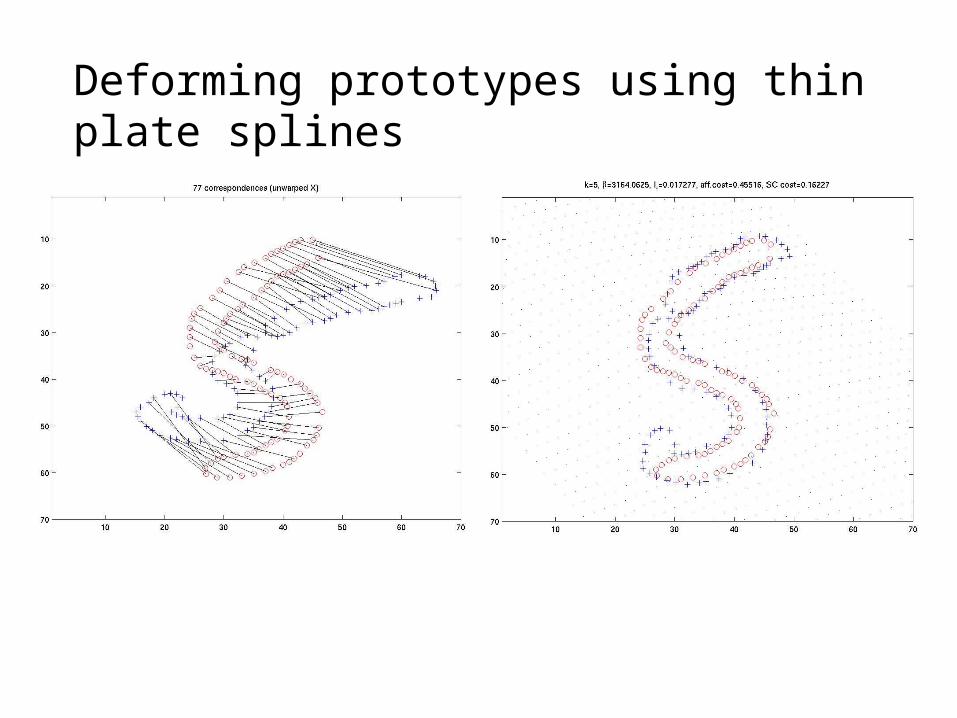
Deforming prototypes using thin plate splines
Only 25 deformable templates needed (instead of 60 K) to get 5% error
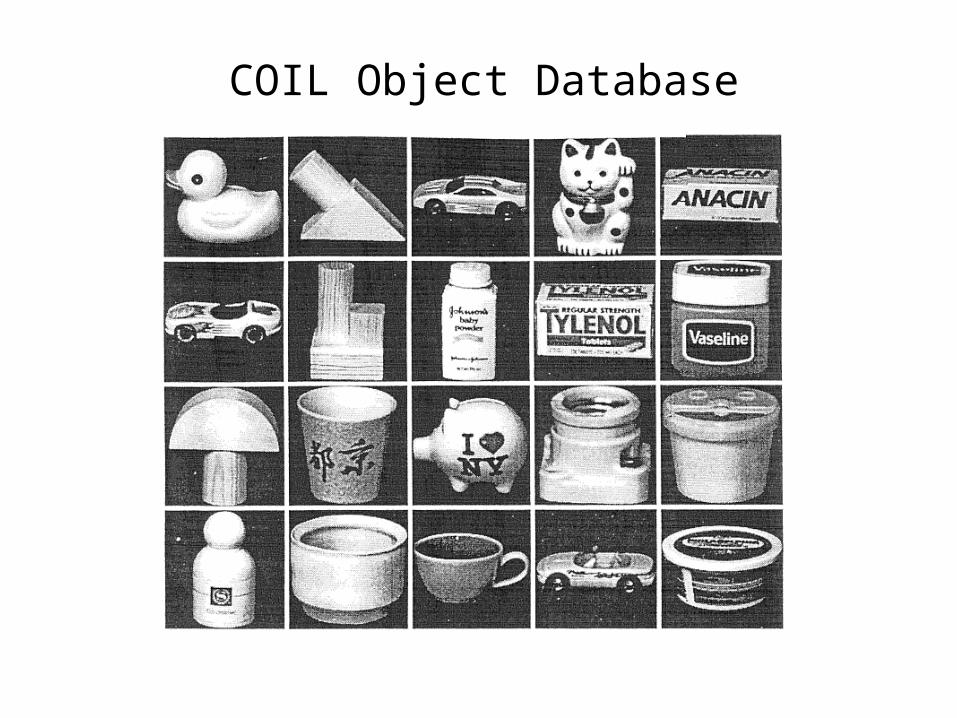
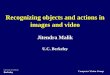
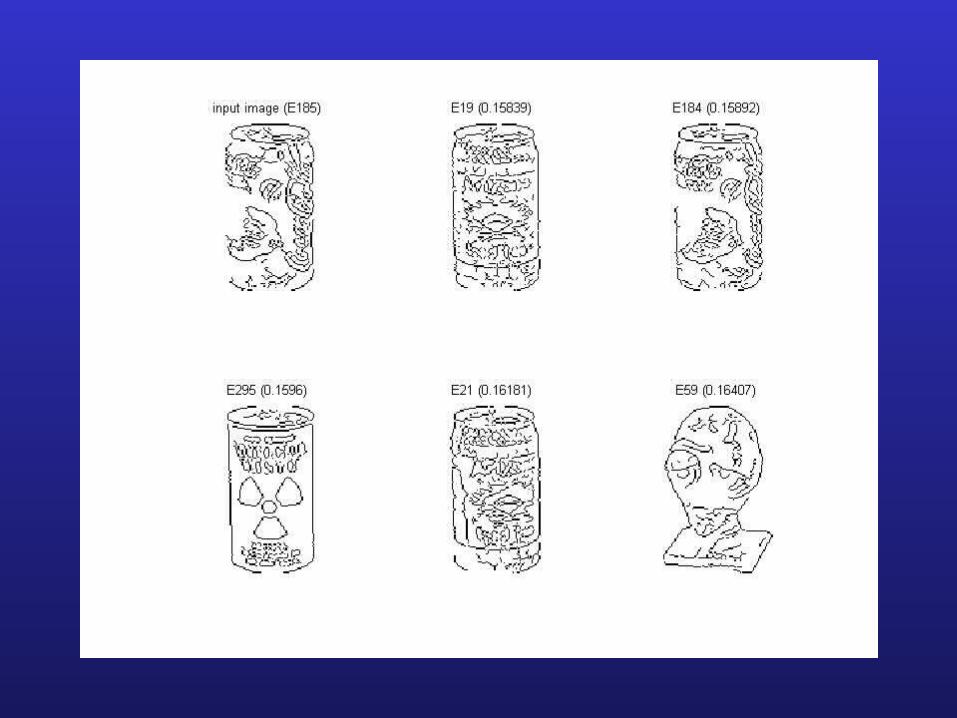
COIL Object Database


Computing cost on a Pentium PCComputing cost on a Pentium PC
• Segmentation: 5 minutes /image
• Matching : 0.5 sec / match
• Segmentation: 5 minutes /image
• Matching : 0.5 sec / match
Cost on 10**4 node machine Cost on 10**4 node machine
• Segmentation: 0.03 sec /image, which is 30 Hz (video rate)
• Matching : 20K matches/sec at full resolution (100 points/shape)
• Segmentation: 0.03 sec /image, which is 30 Hz (video rate)
• Matching : 20K matches/sec at full resolution (100 points/shape)
How many prototype views can one match at 1 Hz?
How many prototype views can one match at 1 Hz?
• 1K candidate super-regions• Consider only 1% of matches at full
resolution (10% pass color/texture filter, 10% of those pass low resolution shape filter)
• If half time spent in pruning and half in full resolution matching, 1000 prototype views can be matched at 1 Hz.
• 1K candidate super-regions• Consider only 1% of matches at full
resolution (10% pass color/texture filter, 10% of those pass low resolution shape filter)
• If half time spent in pruning and half in full resolution matching, 1000 prototype views can be matched at 1 Hz.
What can one do with matching 1000 views a second?
What can one do with matching 1000 views a second?
• Worst case: 100 object categories
• Best case depends on how well one can exploit context, hierarchy and hashing.
• Cf. humans can recognize 10-100K objects
• Worst case: 100 object categories
• Best case depends on how well one can exploit context, hierarchy and hashing.
• Cf. humans can recognize 10-100K objects
Memory requirementsMemory requirements
• 10 K object categories * 10 views/category * 100 * 100 pixels/view * 1 byte/pixel gives us 1 Gigabyte.
• 10 K object categories * 10 views/category * 100 * 100 pixels/view * 1 byte/pixel gives us 1 Gigabyte.
Concluding remarks Concluding remarks
• Speech in 1985 was in the same state as vision in 2000. Hidden Markov Models adoption led to a decade of research which refined the paradigm for continuous speech recognition.
• The proposed 3 stage framework for recognition: segmentation, association and matching, could provide the same focus and coherence to vision research leading to general purpose object recognition in 10 years.
• Speech in 1985 was in the same state as vision in 2000. Hidden Markov Models adoption led to a decade of research which refined the paradigm for continuous speech recognition.
• The proposed 3 stage framework for recognition: segmentation, association and matching, could provide the same focus and coherence to vision research leading to general purpose object recognition in 10 years.





Recommended