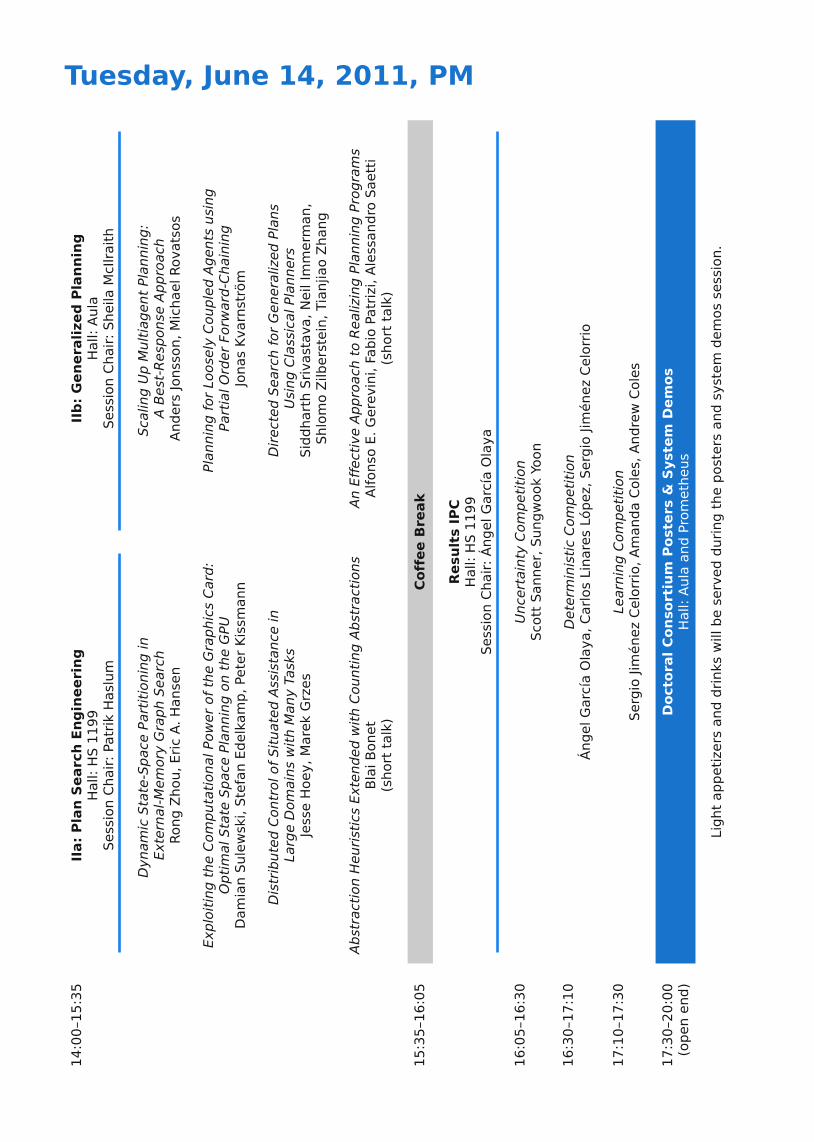
IIa: P
lan
Search
En
gin
eerin
g
Hall: H
S 1
19
9
14
:0
0–1
5:3
5
IIb
:
Gen
eralized
Plan
nin
g
Hall: A
ula
15
:3
5–1
6:0
5
Coffee B
reak
Resu
lts IP
C
Hall: H
S 1
19
9
16
:0
5–1
7:3
0
17
:3
0–2
0:0
0
(op
en end
)
DC
P
osters &
S
ystem
D
em
os
Hall: A
ula and
Prom
etheus
08
:4
5–0
9:0
0
Op
en
in
g R
em
arks
Hall: A
ula
Ia: H
eu
ristics
for P
lan
nin
g
Hall: H
S 1
19
9
09
:0
0–1
0:0
0
In
vited
Talk: Jason D
. W
illiam
s
Hall: A
ula
10
:0
0–1
0:3
0
Coffee B
reak
10
:3
0–1
2:1
0
Ib
: M
arkov
Decision
Processes
Hall: A
ula
12
:1
0–1
4:0
0
Lu
nch
B
reak
09
:0
0–1
0:0
0
In
vited
Talk: Pascal Van
Hentenryck
Hall: A
ula
10
:0
0–1
0:3
0
Coffee B
reak
IIIa:
Ap
plication
s I
Hall: H
S 1
19
9
10
:3
0–1
2:1
0
IIIb
: Fron
tiers
in
P
lan
nin
g
Hall: A
ula
12
:1
0–1
4:0
0
Lu
nch
B
reak
IV
: B
est P
ap
ers
Hall: A
ula
14
:0
0–1
5:4
0
15
:4
0–1
6:1
0
Coffee B
reak
16
:1
0–1
8:1
0
Com
mu
nity M
eetin
g
(in
clu
des
Best D
issertation
Talk
an
d A
ward
s C
erem
on
y)
Hall: A
ula
20
:0
0
Ban
qu
et
09
:0
0–1
0:0
0
In
vited
Talk: M
ichael P. W
ellm
an
Hall: A
ula
10
:0
0–1
0:3
0
Coffee B
reak
Va:
Ap
plication
s
II
Hall: H
S 1
19
9
10
:3
0–1
2:1
5
Vb
: Lim
its
an
d
Possib
ilities
Hall: A
ula
12
:1
5–1
4:0
0
Lu
nch
B
reak
VIa:
Au
tom
ated
Sch
ed
ulin
g
Hall: H
S 1
19
9
14
:0
0–1
5:1
5
VIb
:
In
com
plete
In
form
ation
Hall: A
ula
15
:1
5–1
5:4
5
Coffee B
reak
VIIa: R
eal-
Tim
e
Plan
nin
g
Hall: H
S 1
19
9
15
:4
5–1
6:2
5
VIIb
:
Ap
plication
s
III
Hall: A
ula
16
:2
5–1
6:3
0
Closin
g R
em
arks
Hall: A
ula
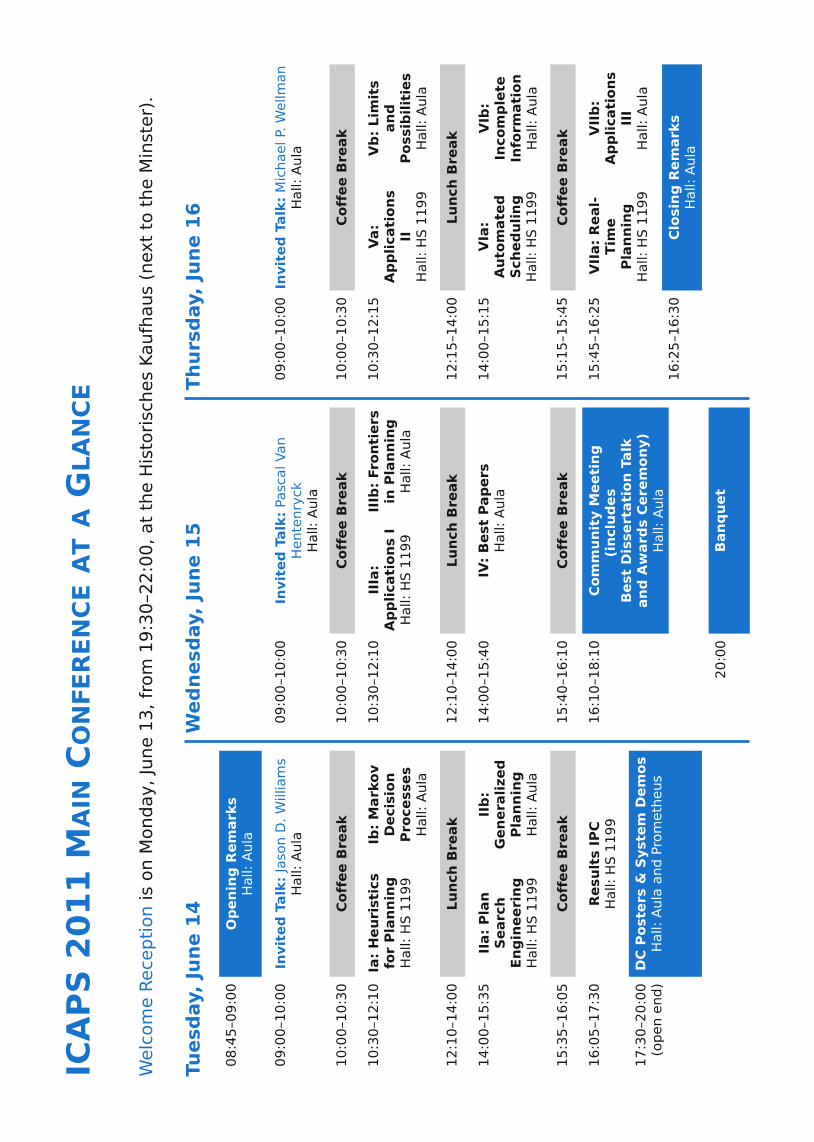
IC
AP
S 2011 M
AIN C
ON
FER
EN
CE A
T A G
LA
NC
E
Tu
esd
ay, Ju
ne 14
Wed
nesd
ay, Ju
ne 15
Th
ursd
ay, Ju
ne 16
Welcom
e R
ecep
tion is on M
ond
ay, June 1
3, from
1
9:3
0–2
2:0
0, at the H
istorisches K
aufhaus (next to the M
inster).

Tuesday, June 14, 2011, AM
08
:4
5–0
9:0
0
Op
en
in
g R
em
arks
Hall: A
ula
Ia: H
eu
ristics for P
lan
nin
g
Hall: H
S 1
19
9
Session C
hair: S
ub
barao K
am
bham
pati
Where Ig
noring
D
elete Lists W
orks,
Part II: C
ausal G
rap
hs
Jörg
H
offm
ann
09
:0
0–1
0:0
0
In
vited
Talk: S
poken D
ialog
S
ystem
s as an A
pp
lication of Planning
und
er U
ncertainty
Jason D
. W
illiam
s
Hall: A
ula
Session C
hair: S
tefan Ed
elkam
p
10
:0
0–1
0:3
0
Coffee B
reak
10
:3
0–1
2:1
0
Ib
: M
arkov D
ecision
P
rocesses
Hall: A
ula
Session C
hair: S
ylvie Thiéb
aux
Heuristic S
earch for G
eneralized
S
tochastic
Shortest Path M
DPs
And
rey Kolob
ov, M
ausam
, D
aniel S
. W
eld
, H
éctor G
effner
When O
ptim
al is Just N
ot G
ood
Enoug
h:
Learning
Fast Inform
ative A
ction C
ost Partitioning
s
Erez K
arp
as, M
ichael K
atz, S
haul M
arkovitch
Efficient Policy C
onstruction for M
DPs R
ep
resented
in
Prob
ab
ilistic PD
DL
Boris Lesner, B
runo Z
anuttini
Heuristics for Planning
w
ith S
AT and
Exp
ressive A
ction D
efinitions
Jussi R
intanen
Closing
the G
ap
: Im
proved
B
ound
s on
Op
tim
al PO
MD
P S
olutions
Pascal Poup
art, Kee-Eung
K
im
, D
ong
ho K
im
LPR
PG
-P: R
elaxed
Plan H
euristics for
Planning
w
ith Preferences
Am
and
a C
oles, A
nd
rew
C
oles
Markov D
ecision Processes w
ith O
rd
inal R
ew
ard
s:
Reference Point-B
ased
Preferences
Paul W
eng
12
:1
0–1
4:0
0
Lu
nch
B
reak (in
divid
ual, n
o org
an
ized
lu
nch
p
rovid
ed
)
Dynam
ic S
tate-S
pace Partitioning
in
External-M
em
ory G
rap
h S
earch
Rong
Z
hou, Eric A
. H
ansen
IIb
: G
en
eralized
P
lan
nin
g
Hall: A
ula
Session C
hair: S
heila M
cIlraith
Scaling
U
p M
ultiag
ent Planning
:
A B
est-R
esp
onse A
pp
roach
And
ers Jonsson, M
ichael R
ovatsos
IIa: P
lan
S
earch
En
gin
eerin
g
Hall: H
S 1
19
9
Session C
hair: Patrik H
aslum
Dynam
ic S
tate-S
pace Partitioning
in
External-M
em
ory G
rap
h S
earch
Rong
Z
hou, Eric A
. H
ansen
14
:0
0–1
5:3
5
IIb
: G
en
eralized
P
lan
nin
g
Hall: A
ula
Session C
hair: S
heila M
cIlraith
Scaling
U
p M
ultiag
ent Planning
:
A B
est-R
esp
onse A
pp
roach
And
ers Jonsson, M
ichael R
ovatsos
Exp
loiting
the C
om
putational Pow
er of the G
rap
hics C
ard
:
Op
tim
al S
tate S
pace Planning
on the G
PU
Dam
ian S
ulew
ski, S
tefan Ed
elkam
p, Peter K
issm
ann
Planning
for Loosely C
oup
led
A
gents using
Partial O
rd
er Forw
ard
-C
haining
Jonas K
varnström
Distrib
uted
C
ontrol of S
ituated
A
ssistance in
Larg
e D
om
ains w
ith M
any Tasks
Jesse H
oey, M
arek G
rzes
Directed
S
earch for G
eneralized
Plans
Using
C
lassical Planners
Sid
dharth S
rivastava, N
eil Im
merm
an,
Shlom
o Z
ilb
erstein, Tianjiao Z
hang
Ab
straction H
euristics Extend
ed
w
ith C
ounting
A
bstractions
Blai B
onet
(short talk)
An Effective A
pp
roach to R
ealizing
Planning
Prog
ram
s
Alfonso E. G
erevini, Fab
io Patrizi, A
lessand
ro S
aetti
(short talk)
15
:3
5–1
6:0
5
Coffee B
reak
Resu
lts IP
C
Hall: H
S 1
19
9
Session C
hair: Á
ng
el G
arcía O
laya
Determ
inistic C
om
petition
Áng
el G
arcía O
laya, C
arlos Linares Lóp
ez, S
erg
io Jim
énez C
elorrio
16
:0
5–1
6:3
0
Uncertainty C
om
petition
Scott S
anner, S
ung
wook Yoon
Learning
C
om
petition
Serg
io Jim
énez C
elorrio, A
mand
a C
oles, A
nd
rew
C
oles
17
:3
0–2
0:0
0
(op
en end
)
Doctoral C
on
sortiu
m P
osters &
S
ystem
D
em
os
Hall: A
ula and
Prom
etheus
Tuesday, June 14, 2011, PM
Lig
ht ap
petizers and
d
rinks w
ill b
e served
d
uring
the p
osters and
system
d
em
os session.
17
:1
0–1
7:3
0
16
:3
0–1
7:1
0

09
:0
0–1
0:0
0
In
vited
Talk: Last-M
ile D
isaster Prep
ared
ness and
R
ecovery
Pascal Van H
entenryck
Hall: A
ula
Session C
hair: Fahiem
B
acchus
10
:0
0–1
0:3
0
Coffee B
reak
IIIa: A
pp
lication
s I
Room
: H
S 1
19
9
Session C
hair: S
cott S
anner
Cost-S
ensitive C
oncurrent Planning
und
er D
uration
Uncertainty for S
ervice-Level A
greem
ents
Am
and
a C
oles, A
nd
rew
C
oles, A
llan C
lark, S
tep
hen G
ilm
ore
10
:3
0–1
2:1
0
IIIb
: Fron
tiers in
P
lan
nin
g
Hall: A
ula
Session C
hair: D
avid
S
mith
Learning
Inad
missib
le H
euristics d
uring
S
earch
Jord
an T. Thayer, A
ustin D
ionne, W
heeler R
um
l
Online Planning
for a M
aterial C
ontrol S
ystem
for
Liq
uid
C
rystal D
isp
lay M
anufacturing
Minh D
o, K
azum
ichi O
kajim
a, S
erd
ar U
ckun,
Fum
io H
aseg
aw
a, Yukihiro K
aw
ano, Koji Tanaka,
Lara C
raw
ford
, Ying
Z
hang
, A
ki O
hashi
Ensem
ble M
onte-C
arlo Planning
:
An Em
pirical S
tud
y
Alan Fern, Paul Lew
is
Planning
M
ulti-M
od
al Transp
ortation Prob
lem
s
José E. Flórez, Á
lvaro Torralb
a A
rias d
e R
eyna, Javier G
arcía,
Carlos Linares Lóp
ez, Á
ng
el G
arcía O
laya, D
aniel B
orrajo
Effective H
euristics and
B
elief Tracking
for
Planning
w
ith Incom
plete Inform
ation
Alexand
re A
lb
ore, M
iq
uel R
am
írez, H
éctor G
effner
A Path Planning
A
lg
orithm
for an A
UV
Guid
ed
w
ith H
om
otop
y C
lasses
Em
ili H
ernand
ez, M
arc C
arreras, Pere R
id
ao
Searching
for Plans w
ith C
arefully D
esig
ned
Prob
es
Nir Lip
ovetzky, H
éctor G
effner
12
:1
0–1
4:0
0
Lu
nch
B
reak (in
divid
ual, n
o org
an
ized
lu
nch
p
rovid
ed
)
Wednesday, June 15, 2011, AM
Autom
atic C
onstruction of Efficient M
ultip
le B
attery U
sag
e Policies
Maria Fox, D
erek Long
, D
aniele M
ag
azzeni
(b
est p
ap
er)
IV
: B
est P
ap
ers
Hall: A
ula
Session C
hair: M
alte H
elm
ert
Autom
atic C
onstruction of Efficient M
ultip
le B
attery U
sag
e Policies
Maria Fox, D
erek Long
, D
aniele M
ag
azzeni
(b
est p
ap
er)
14
:0
0–1
5:4
0
Com
puting
A
ll-Pairs S
hortest Paths b
y Leverag
ing
Low
Treew
id
th
Léon Planken, M
athijs d
e W
eerd
t, R
om
an van d
er K
rog
t
(h
on
orab
le m
en
tion
for b
est stu
den
t p
ap
er)
Trad
e-O
ffs in S
am
pling
-B
ased
A
dversarial Planning
Rag
huram
R
am
anujan, B
art S
elm
an
(h
on
orab
le m
en
tion
for b
est stu
den
t p
ap
er)
Planning
to Perceive: Exp
loiting
M
ob
ility For R
ob
ust O
bject D
etection
Javier Velez, G
arrett H
em
ann, A
lb
ert S
. H
uang
, Ing
mar Posner, N
icholas R
oy
(b
est stu
den
t p
ap
er)
15
:4
0–1
6:1
0
Coffee B
reak
16
:1
0–1
8:1
0
Com
mu
nity M
eetin
g
(in
clu
des B
est D
issertation
Talk an
d A
ward
s C
erem
on
y)
Hall: A
ula
Session C
hair: S
hlom
o Z
ilb
erstein
20
:0
0
Ban
qu
et
Wednesday, June 15, 2011, PM
09
:0
0–1
0:0
0
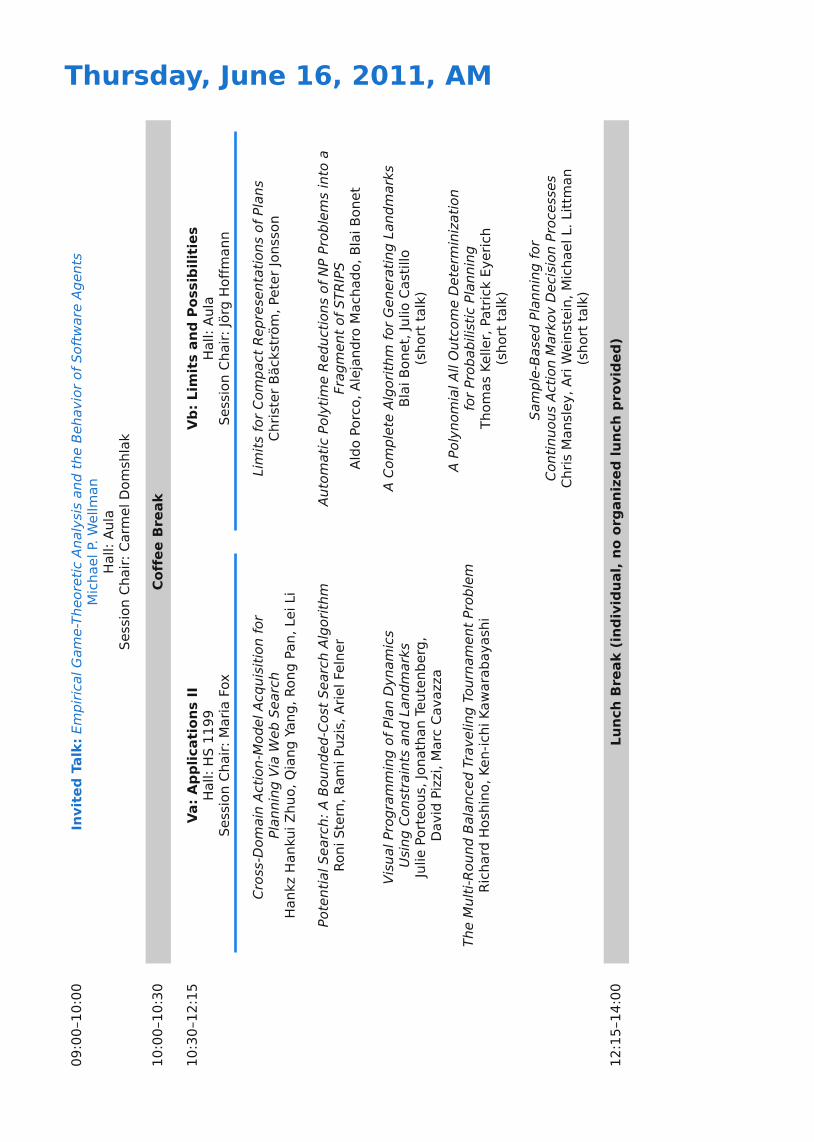
In
vited
Talk: Em
pirical G
am
e-Theoretic A
nalysis and
the B
ehavior of S
oftw
are A
gents
Michael P. W
ellm
an
Hall: A
ula
Session C
hair: C
arm
el D
om
shlak
10
:0
0–1
0:3
0
Coffee B
reak
Va: A
pp
lication
s II
Hall: H
S 1
19
9
Session C
hair: M
aria Fox
Cross-D
om
ain A
ction-M
od
el A
cq
uisition for
Planning
V
ia W
eb
S
earch
Hankz H
ankui Z
huo, Q
iang
Yang
, R
ong
Pan, Lei Li
10
:3
0–1
2:1
5
Vb
: Lim
its an
d P
ossib
ilities
Hall: A
ula
Session C
hair: Jörg
H
offm
ann
Lim
its for C
om
pact R
ep
resentations of Plans
Christer B
äckström
, Peter Jonsson
Potential S
earch: A
B
ound
ed
-C
ost S
earch A
lg
orithm
Roni S
tern, R
am
i Puzis, A
riel Felner
Autom
atic Polytim
e R
ed
uctions of N
P Prob
lem
s into a
Frag
ment of S
TR
IPS
Ald
o Porco, A
lejand
ro M
achad
o, B
lai B
onet
Visual Prog
ram
ming
of Plan D
ynam
ics
Using
C
onstraints and
Land
marks
Julie Porteous, Jonathan Teutenb
erg
,
David
Pizzi, M
arc C
avazza
A C
om
plete A
lg
orithm
for G
enerating
Land
marks
Blai B
onet, Julio C
astillo
(short talk)
The M
ulti-R
ound
B
alanced
Traveling
Tournam
ent Prob
lem
Richard
H
oshino, Ken-ichi K
aw
arab
ayashi
A Polynom
ial A
ll O
utcom
e D
eterm
inization
for Prob
ab
ilistic Planning
Thom
as Keller, Patrick Eyerich
(short talk)
Sam
ple-B
ased
Planning
for
Continuous A
ction M
arkov D
ecision Processes
Chris M
ansley, A
ri W
einstein, M
ichael L. Littm
an
(short talk)
12
:1
5–1
4:0
0
Lu
nch
B
reak (in
divid
ual, n
o org
an
ized
lu
nch
p
rovid
ed
)
Thursday, June 16, 2011, AM
Sched
uling
an A
ircraft R
ep
air S
hop
Maliheh A
ram
on B
ajestani, J. C
hristop
her B
eck
VIb
: In
com
plete In
form
ation
Hall: A
ula
Session C
hair: Pascal Poup
art
Planning
and
A
cting
in Incom
plete D
om
ains
Christop
her W
eb
er, D
aniel B
ryce

VIa: A
utom
ated
S
ch
ed
ulin
g
Hall: H
S 1
19
9
Session C
hair: D
aniel B
orrajo
Sched
uling
an A
ircraft R
ep
air S
hop
Maliheh A
ram
on B
ajestani, J. C
hristop
her B
eck
14
:0
0–1
5:1
5
VIb
: In
com
plete In
form
ation
Hall: A
ula
Session C
hair: Pascal Poup
art
Planning
and
A
cting
in Incom
plete D
om
ains
Christop
her W
eb
er, D
aniel B
ryce
Scalab
le S
ched
uling
for H
ard
ware-A
ccelerated
Functional Verification
Michael D
. M
offitt, G
ernot E. G
ünther
Conting
ent Planning
as A
ND
/O
R Forw
ard
S
earch
with D
isjunctive R
ep
resentation
Son Thanh To, Tran C
ao S
on, Enrico Pontelli
Theoretical A
sp
ects of S
ched
uling
C
oup
led
-Tasks in the
Presence of C
om
patib
ility G
rap
h
Gilles S
im
onin, R
od
olp
he G
iroud
eau,
Jean-C
laud
e König
, B
enoit D
arties
Generalised
D
om
ain M
od
el A
cq
uisition
from
A
ction Traces
Step
hen C
ressw
ell, Peter G
reg
ory
15
:1
5–1
5:4
5
Coffee B
reak
VIIa: R
eal-Tim
e P
lan
nin
g
Hall: H
S 1
19
9
Session C
hair: J. C
hristop
her B
eck
Partial-O
rd
er S
up
port-Link S
ched
uling
Deb
deep
B
anerjee, Patrik H
aslum
(short talk)
15
:4
5–1
6:2
5
VIIb
: A
pp
lication
s III
Hall: A
ula
Session C
hair: G
ab
riele R
ög
er
The M
inim
al S
eed
S
et Prob
lem
Avitan G
efen, R
onen I. B
rafm
an
(short talk)
Fast S
ub
goaling
for Pathfind
ing
V
ia R
eal-Tim
e S
earch
Carlos H
ernánd
ez, Jorg
e A
. B
aier
(short talk)
Planning
Prob
lem
s for S
ocial R
ob
ots
Gian D
ieg
o Tip
ald
i, K
ai O
. A
rras
(short talk)
16
:2
5–1
6:3
0
Closin
g R
em
arks
Hall: A
ula
Thursday, June 16, 2011, PM
Recommended


![· d v s t p u b m m f s &] ] ]&] ] ]&] ] ]&] ] ]&] ] ]&] ] ]: % * 1-0. « 5 * $ & / % / 0 7 0) $ 6 *. 4 1 1-& 0 & / 5 0 4 (3 ' ¶ " e " e " e " e 0 e "e / 0 4 *. 1" 35& 13](https://img.pdfslide.us/doc/110x75/5e6150e36c9676416c6620a9/d-v-s-t-p-u-b-m-m-f-s-.jpg)