Journal of
www.elsevier.com/locate/jelechem
Journal of Electroanalytical Chemistry 604 (2007) 1–8
ElectroanalyticalChemistry
State estimation in Volmer–Heyrovsky reactions coupled withsorption processes: Application to the hydrogen reaction
B.E. Castro a, R.H. Milocco b,*
a Instituto de Investigaciones Fisicoquımicas Teoricas y Aplicadas (INIFTA), Universidad Nacional de La Plata. Suc 4, CC16 (1900), La Plata, Argentinab Grupo Control Automatico y Sistemas (GCAyS), Departamento de Electrotecnia, Facultad de Ingenierıa, Universidad Nacional del Comahue,
Buenos Aires 1400, 8300 Neuquen, Argentina
Received 7 March 2006; received in revised form 30 December 2006; accepted 10 January 2007Available online 14 January 2007
Abstract
In this work, a procedure to estimate variables of electrochemical systems involving adsorption and absorption of intermediate speciescoupled to diffusion is presented. The method is model-based and needs potential and current measurements. Since the system is linearand time variant, the well known Kalman’s filter theory is used to estimate the variables. An analysis of theoretical observability showsthe procedure success even in the case of constant potential/current. The error estimation converge asymptotically to zero for slow timevariations. The procedure is useful to estimate H concentrations in metallic substrates during H evolution and insertion. To illustrate theproposed procedure, state observations of the hydrogen concentration on steel and metal hydride electrode are presented. In the last case,the procedure is used to estimate the state of charge of the electrode.� 2007 Elsevier B.V. All rights reserved.
Keywords: State of charge; Observability; Metal hydride; Hydrogen reaction; Kalman filter
1. Introduction
The study of hydrogen evolution, sorption, and diffu-sion on metals and alloys has been the subject of numerousscientific publications. These processes are related to theoperation of hydrogen storage materials in rechargeablebatteries such as Ni/metal hydride (MH) [1–3]. They arealso related to the ingress of H into ferrous alloys, whichis a major cause of embrittlement and damage coupled tometallic corrosion in many technological processes [4]. Inboth cases, the mechanism for hydrogen evolution andadsorption may be described by the Volmer–Heyrovsky–Tafel scheme coupled to subsequent absorption and diffu-sion of H atoms into the metallic substrate [5–7]. For bothsystems, the determination of H concentration dependencewith respect to position and time is important. In the case
0022-0728/$ - see front matter � 2007 Elsevier B.V. All rights reserved.
doi:10.1016/j.jelechem.2007.01.002
* Corresponding author. Tel./fax: +54 299 4488305.E-mail addresses: [email protected] (B.E. Castro), milocco@
uncoma.edu.ar (R.H. Milocco).
of metal hydride electrodes, the H concentration profile isdirectly related to the state of charge (SOC) of the elec-trode. In the case of systems undergoing corrosion pro-cesses, the hydrogen content is related to the failure ofthe material. Typically the SOC of the battery is desiredto be kept within appropriate limits, for example20% 6 SOC 6 95%, so the estimation of the SOC is essen-tial for the battery to operate within these safe limits.
In this work we study the modeling and state observa-tion of hydrogen evolution and absorption reactions cou-pled to H diffusion. The reactions shall be described interms of the mechanism associated with absorption anddiffusion processes. Using spatial discretization of themetallic substrate, the diffusion differential equations areapproximated by ordinary linear differential equations withconstant parameters. In this way, having previous knowl-edge of initial and boundary conditions, the state variablessuch as surface concentration of intermediate species andbulk concentration of H may be well predicted. However,even when knowing the initial conditions, the presence of

2 B.E. Castro, R.H. Milocco / Journal of Electroanalytical Chemistry 604 (2007) 1–8
disturbances may produce differences between predictedand real values. In a more realistic scenario where initialconditions and disturbances are unknown, state estimationby direct model simulation is imprecise. Instead, using themodel and filtering theory, it is possible to estimate thestate evolution by just measuring output variables likecurrent and voltage [8,9]. In this paper the state observa-tion problem is solved by using the Kalman’s filter fornon-stationary systems [10]. For this purpose, the modelwas written as a lineal time/dependent set of equations.
The paper is organized as follows: in Section 2, electro-chemical mechanisms are mathematically modeled as a setof nonlinear differential equations in terms of mass andcharge balances. Subsequently, the model equations arespatially discretized and represented as ordinary nonlineardifferential equations with time varying parameters. After-ward, reformulation using the measured current allow us toset up the model as linear and time-varying, which is usedproperly in the Kalman’s filter. In Section 3, the observ-ability condition is analyzed in the context of the Kalman’sfilter. In Section 4, the state estimation procedure is per-formed in two different electrochemical systems by usingmodel-based simulations of real electrodes whose parame-ters were reported in the literature. The first one deals withH2 evolution on an AISI 1045 planar steel electrode in0.1 M NaOH [11], and the second one, with potentiostaticvariations of a metal hydride electrode constituted byMmNi3.6Co0.8Mn0.4Al0.3 quasi-spherical alloy particles, in6 M KOH [12]. Finally, conclusions are presented in Sec-tion 5.
2. Model formulation
Hydrogen evolution coupled to insertion in metallic sub-strates constitutes an electrochemical intercalation processinvolving charge transfer steps, adsorption and absorptionof electroactive species, and mass transfer. The process canbe modeled as follows [5,7]: in the first step, water reactswith a surface metal atom (M) producing an adsorbedintermediate (MHad) on the surface. This electroreductionstep is described by the Volmer reaction and can be repre-sented by the following electron-transfer equation:
H2OþMþ e� ()k1
k�1
MHad þOH�; ð1Þ
where ki ¼ k0i e�baigðtÞ and k�i ¼ k0
�iebð1�aiÞgðtÞ with b = F/RT,
ai the symmetry factor – being a number in the interval[0,1], g(t) = E(t) � Eeq is the overpotential – Eeq is theHydrogen reaction equilibrium potential. In a second elec-troreduction step, adsorbed species react with water pro-ducing hydrogen evolution (Heyrovsky’s reaction) whichcan be described as
MHad þH2Oþ e� ()k2
k�2
MþH2 þOH�: ð2Þ
The equilibrium kinetic constants related to Volmer andHeyrovsky steps are related in terms of [17]
k01k0
2
k0�1k0
�2
¼ 1: ð3Þ
In a third step, the hydrogen adatoms, MHad, are trans-ferred to a free interstitial site in the metal (S) just beneaththe metal surface. This process is parallel to the Heyrov-sky’s step. Calling (SHab) the absorbed atom of hydrogen,the absorption reaction may be written as follows:
MHad þ S ()k0
3
k0�3
Mþ SHab H sorption reaction; ð4Þ
where k03; k0
�3 are both potential-independent rate con-stants. Then, the equations for mass and charge balancesrepresenting the kinetics of the system are the following:
dhdt¼ k1
~h� k�1h� k2hþ k�2~h� Jð0; tÞ
C; ð5Þ
Jð0; tÞ ¼ Cðk03h~x� k0
�3x~hÞ; ð6ÞI f ¼ �FACðk1
~h� k�1hþ k2h� k�2~hÞ; ð7Þ
followed by diffusion of MHad. J(0, t) is the flux of hydro-gen diffusing from the surface to the interior of the metal.Let us assume that h(t) 2 [0,1] is the surface coverage ofthe intermediate species MHad and ~hðtÞ ¼ 1� hðtÞ thecorresponding free metal surface. Let us call x(z,t) the frac-tional concentration of SHab species, being xðz; tÞ ¼cðz; tÞ=�c, where �c is the maximum SHab concentration,being z the spatial position and t, the time. x(z,t) isexpressed adimensionally in the interval [0, 1]. The comple-mentary concentration is given by ~xðz; tÞ ¼ 1� xðz; tÞ,which represents the fractional concentration of availablevacant sites for H in the bulk; J(z,t) is the flux of hydrogendiffusing from the surface to the interior of the metal atspatial position z and time t; C is the MHad maximum sur-face concentration; If is the faradaic current; F is theFaraday constant; and A is the active electrode area.
To complete the model given by Eqs. (5)–(7) we need toinclude the equations describing hydrogen diffusionaltransport in the metal substrate. This may be expressedby Fick’s first and second laws, which in the case of spher-ical geometry corresponds to [13]
Jðz; tÞ ¼ �D�coxðz; tÞ
oz; ð8Þ
oxðz; tÞot
¼ Do
2xðz; tÞoz2
þ 2
zoxðz; tÞ
oz
� �; ð9Þ
where D is the diffusion coefficient. Using Eq. (8) in (9) weget
oxðz; tÞot
¼ � 1
�cz2
oz2Jðz; tÞð Þoz
: ð10Þ
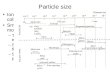
The analytical solution of Eq. (10) is complex [13]. Then, inorder to simplify, it can be approximated into a set of or-dinary differential equations by using a spatial discretiza-tion. Spatial discretization is a very well known methodto approximate partial differential equations in ordinarydifferential equations, for details see [6,7]. Eq. (10) can be

Fig. 1. Spatial discretization of the active film.
B.E. Castro, R.H. Milocco / Journal of Electroanalytical Chemistry 604 (2007) 1–8 3
discretized along the space variable z by considering N
slices of the metal with thickness Dz, as illustrated in Fig. 1.If each cell is small enough, the concentration x(zi,t) in
the ith cell (0 6 i 6 N � 1) can be considered constant withinput and output hydrogen flow given by J(zi�1,t) andJ(zi,t), respectively. In Fig. 1, z = 0 corresponds to the elec-trode surface. Using this approximation, Eqs. (8) and (10)can be written as
Jðzi; tÞ ¼D�cDzðxðzi�1; tÞ � xðzi; tÞÞ; ð11Þ
dxðzi; tÞdt
¼ � 1
�cz2i Dzðz2
iþ1Jðziþ1; tÞ � z2i Jðzi; tÞÞ: ð12Þ
By replacing (11) in (12) and considering a boundary con-dition for the flux J(zN, t) = 0, the following set of ordinarydifferential equations for the hydrogen concentration pro-file is fulfilled:
dxðz0;tÞdt ¼ �a11d0xðz0; tÞþa11d0xðz1; tÞþ Jðz0; tÞ=ð�cDzÞ
dxðz1;tÞdt ¼ a11xðz0; tÞ�a11ð1þd1Þxðz1; tÞþa11d1xðz2; tÞ
..
.¼ ..
.
dxðzi;tÞdt ¼ a11xðzi�1; tÞ�a11ð1þdiÞxðzi; tÞþa11dixðziþ1; tÞ
..
.¼ ..
.
dxðzN�1;tÞdt ¼ a11xðzN�2; tÞ�a11ð1þdN�1ÞxðzN�1; tÞþa11dN�1xðzN ; tÞ
dxðzN ;tÞdt ¼ a11xðzN�1; tÞ�a11xðzN ; tÞ
ð13Þ
where a11 ¼ D=Dz2; C ¼ �cDz, and di ¼ z2iþ1=z2
i ¼ ððiþ1Þ=iÞ2. Notice that in the case of spherical diffusion at theparticle centre the condition is always J(zN,t) = 0, whichis equivalent to dx(zN,t)/dz = 0. Thus, the approximationx(zN,t) = x(zN+1,t) holds and the last equation of (13) fulfilsby direct inspection. Latter we will give the conditions forthe case of planar diffusion. If the interfacial area of theelectrode is large, as in battery electrodes, a substantialcontribution of the double layer capacitive current Ic(t) isexpected, which is modeled in parallel with the faradaiccurrent, If(t), according to the following dynamics:
IcðtÞ ¼ Cdl
dEdt; ð14Þ
where Cdl is the double layer capacity and E(t) correspondsto the potential at the electrode interface. The total mea-sured current I(t) is the sum of both the faradaic and thecapacitive currents, which leads to
IðtÞ ¼ V ðtÞ � EðtÞRe
; ð15Þ
where V(t) is the applied potential and Re corresponds tothe ohmic resistance between the working and the referenceelectrodes. Accordingly, the dynamics of the interfacialpotential may be expressed as
dEdt¼ V ðtÞ � EðtÞ
ReCdl
� I fðtÞCdl
¼ V ðtÞReCdl
� EðtÞReCdl
� b21ðtÞCdl
hðtÞ þ b22ðtÞCdl
; ð16Þ
where V(t) is the measured potential and
b21 ¼ FACðk1ðtÞ þ k�1ðtÞ � k2ðtÞ � k�2ðtÞÞ;b22ðtÞ ¼ FACð�k1ðtÞ þ k�2ðtÞÞ:
The complete model is then given by Eqs. (5)–(7), (13),(15), and (16). It is useful to note that for slow time varia-tions where dE(t)/dt � 0, the Eq. (16) become If(t) = I(t).This condition will be used latter. The resistance Re doesnot affect the derivative of the potential since the first termof (16) is governed by (15).
The model obtained above corresponds to the more gen-eral case in which the geometry is spherical. In the casewhere a planar geometry is considered, Eqs. (9) and (10)are replaced by
oxðz; tÞot
¼ Do2xðz; tÞ
oz2ð17Þ
and
oxðz; tÞot
¼ � 1
�cðoJðz; tÞÞ
oz; ð18Þ
respectively. The model equations in this case are given byEqs. (5)–(7), (13) – considering di = 1 "i – and (15). In thecase of linear diffusion, at the limit, there is eitherJ(zN,t) = 0 or dx(zN,t)/dt = 0. The first case coincides withEq. (13) derived for spherical diffusion, in the second casethe last equation of (13) should be replaced by dx(zN,t)/dt = 0. The same approximation as above is made with re-spect to the potential variations dE(t)/dt � 0.
Proper simulation of the state variables can be done bysolving numerically the set of model equations with giveninitial conditions. However, the initial conditions are oftenunknown and there are also disturbances that affect thestate evolutions which are not taken into account in themodel. Thus, it is expected for simulated-evolutions tobehave differently from the real ones. In order to overcomethese difficulties, we propose to use a model based observeremploying the measured potential V(t) and current I(t).The observer theory for linear systems was a very activeresearch area around the sixties and up to day is includedas a basic contents of graduated courses in engineering.However, it is an active research area for nonlinear sys-tems, [8,9]. In the following section we propose to use thewell known Kalman’s filter theory for estimation ofvariables.

Fig. 2. System and Kalman filter set up.
4 B.E. Castro, R.H. Milocco / Journal of Electroanalytical Chemistry 604 (2007) 1–8
3. Estimation of state variables
Consider a linear time variant system described by thefollowing state space formulation:
_nðtÞ ¼ AðtÞnðtÞ þ BðtÞ þ wðtÞ;IðtÞ ¼ CðtÞnðtÞ þ DðtÞ þ rðtÞ;
ð19Þ
where n(t) is a column vector of n state variables, A(t), is amatrix of dimension n · n, B(t) is a column vector of lengthn, C(t) is a row vector of dimension n, and D(t) is a scalar.Consider also that the entries of matrices and vectors A(t),B(t), C(t) and D(t) are known nonlinear functions of thepotential E(t) as we will see later in Eqs. (22). Let’s assumeunknown initial conditions, disturbances w(t), and mea-surement noise r(t). We call disturbances to all possibleundesirable environmental stochastic variations affectingthe system.
Consider the system to be observable. Observable meansthat it is possible to estimate the states from some mea-sured variables, which in our case are potential and cur-rent. In the next subsection the observability of thesystem is analyzed in more detail. Based on current andpotential measurement the goal is to obtain estimationsof the state vector n(t) such that the error eðtÞ ¼nðtÞ � nðtÞ between real, n(t), and estimated, nðtÞ valuesbe minimum. From the Kalman filter theory it is wellknown that the optimal estimation is given by the followingpair of differential equations:
_nðtÞ ¼ AðtÞnðtÞ þ BðtÞ þ S�1ðtÞCTðtÞR�1ðIðtÞ � CðtÞnðtÞ � DðtÞÞ;
ð20Þ_SðtÞ ¼ �WSðtÞ � ATðtÞSðtÞ � SðtÞAðtÞ þ CTðtÞR�1CðtÞ; ð21Þ
These couple of equations are solved numerically by start-ing with an arbitrary pair of initial values (n(0), S(0)). Thematrix S(t) is positive semidefinite at time t and R and W
are given positive semi-definite matrices. In the ideal casewhere the disturbances does not affect the system,w(t) = 0, using (20) and (21) the error estimation, due tothe unknown initial conditions, is guaranteed to decayexponentially to zero. In the general case where w(t) is astochastic input with a zero mean and covariance matrixW, being R the covariance matrix of r(t), the estimator isoptimal in the sense of minimum variance of the error esti-mation, see [15] for details. It is also important to note thatthe pair of Eqs. (20) and (21) are solved numerically usingin each time the measured current and potential. In a prac-tical implementation usually the discrete time version of theKalman filter is used [10,15]. The discrete-time version re-quires a discrete-time model of the system that can be ob-tained by approximating the time derivatives of Eqs. (5)–(7) to differences with small sampled intervals. However,for simplicity, in this paper we deal with the continuous-time version of the estimator. Our task now is to use theKalman’s filter to solve the problem of estimating the vec-tor n(t) = [h(t), x(z0, t), . . . , x(zN,t),E(t)] denoted by
nðtÞ ¼ ½heðtÞ; xeðz0; tÞ; . . . ; xeðzN ; tÞ; EeðtÞ� where the suffix‘‘e’’ means estimated. The complete scheme is depicted inFig. 2.
The Kalman’s filter is based on a linear and time-variantmodel (LTV). In our case, note that in Eq. (6) there areproducts of variables which turn the model nonlinear. Toovercome this difficulty we need to reformulate the modelby replacing the value of h(t) as a function of the faradaiccurrent If(t). It can be done by using Eq. (7) and consider-ing slow time variations where the approximation If (t) =I(t) fulfills. Of course we cannot measure the Faradaic cur-rent, but we can use the measured current I(t) insteadwhich is similar at low frequencies. After some algebraicmanipulation, matrices of the LTV model structure ofEq. (19) can be written as
AðtÞ¼
f11 f12 0 0 0 0 � � �f21 f22 a11d0 0 0 0 � � �0 a11 �a11ð1þd1Þ a11d1 0 0 � � �0 0 a11 �a11ð1þd2Þ a11d2 0 � � �... . .
. . .. . .
. . .. . .
. . ..
0 0 0 0 0 0 � � �0 0 0 0 0 0 � � ��b21
Cdl0 0 0 0 0 � � �
266666666666664� � � 0 0 0 0
� � � 0 0 0 0
� � � 0 0 0 0
� � � 0 0 0 0
. .. . .
. . .. . .
. ...
� � � a11 �a11ð1þdN�1Þ a11dN�1 0
� � � 0 �a11 a11 0
� � � 0 0 0 � 1ReCdl
377777777777775
;
BðtÞ ¼ a2; 0; . . . ; 0; � V ðtÞReCdl
� b22
Cdl
� �� �T
;
CðtÞ ¼ 0; . . . ; 0;� 1
Re
� �; DðtÞ ¼ V ðtÞ
Re
; ð22Þ

B.E. Castro, R.H. Milocco / Journal of Electroanalytical Chemistry 604 (2007) 1–8 5
where the dimension of matrix A(t) is N + 3 and
f11ðtÞ ¼ a1ðtÞ � k03;
f12ðtÞ ¼ k0�3 � ðk0
�3 � k03ÞðI fðtÞ � b22ðtÞÞ=b21ðtÞ;
f21 ¼ Ck03=C;
f22ðtÞ ¼ �a11d0 � Ck0�3=C � b13ðI fðtÞ � b22ðtÞÞ=ðb21ðtÞCÞ;
a1ðtÞ ¼ �k1ðtÞ � k�1ðtÞ � k2ðtÞ � k�2ðtÞ;a2ðtÞ ¼ k1ðtÞ þ k�2ðtÞ;b13 ¼ Cðk0
�3 � k03Þ:
The potential E(t) is obtained by using Eq. (15) with themeasured valued V(t) and I(t). Note that when slow timevariations are considered, the measured current I(t) shouldbe used instead of If(t) in the function f12(t), which turnsthe problem linear time-variant.
3.1. Observability
The states of the system can be estimated only if the sys-tem is observable. The linear time variant system given byEqs. (19) and (22) is observable if the matrix P(t) defined as(see [19])
P ðtÞ ¼ ½P 1ðtÞ; . . . ; P nðtÞ�T; ð23Þhas rank equal to the dimension of the matrix A(t). The ele-ments of the matrix P(t) are given by
P 1ðtÞ ¼ CðtÞ;
P kþ1ðtÞ ¼ P kðtÞAðtÞ þdP kðtÞ
dt; k ¼ 1; . . . ; n� 1:
ð24Þ
Assuming we are interested in estimating the slow timevariations of the variables, the second part of Eq. (24) van-ishes. Then, we must build the matrix P(t) using only thefirst term of (24). We require the determinant of P(t) tobe different from zero to fulfil the rank condition. Aftermatrix manipulation with A(t) and C(t), it can be estab-lished that the system is observable if and only if the fol-lowing condition fulfils:
1
RNþ3e
b21
Cdl
� �Nþ2
f Nþ112 aM
11dN0 dN�1
1 � � � d2N�2 6¼ 0; ð25Þ
where M = 0 + 1 + 2 + � � � + N. Since all the constants in(25) are different from zero, it remains to be shown thatb21(t) and f12(t) are also nonzero for all E(t). To show this,notice that from the kinetic equations the factor f12(t) linksthe influence of surface coverage h(t) with concentrationx(t) which is, from the electrochemical point of view, al-ways nonzero. The coefficient b21(t) links the variationsof h(t) with I(t), which is always a nonzero coefficient.We conclude that the system is at all times observable evenin the steady-state case, where the system behaves linearand time-invariant mode.
4. Simulation results
The state estimations will be carried out in both systems,i.e. electrode with planar and with spherical geometries.
The procedure consists in simulating the electrode modelwith parameters reported in the literature. The Kalman’sfilter using both potential and current measurements – asshown in Fig. 2 – gives the estimated states nðtÞ. The systemand filter responses were simulated by using the packageSimulink from Matlab.
4.1. Planar geometry
To study the estimation of the hydrogen-evolutionstate variables with absorption in substrates with planargeometry, the reaction on AISI 1045 steel in 0.1 M NaOHelectrolyte was analyzed. Identified parameters using a con-ventional three-compartment glass cell at T = 25 C, undera N2 atmosphere with Working electrodes with steel sam-ples in epoxy resin and a planar exposed area of A =1 cm2 was considered. Potentials were measured againsta Hg/HgO/0.1 M – reference electrode. The parameterswere identified by fitting the electrochemical impedanceobtained at potentials more positive than E = �1.2 V,where both the hydrogen evolution and absorption pro-cesses took place at comparable rates. Impedance spectrawere recorded using a Solartron 1255HF FRA and aPARM273 potentiostat coupled to an IBM compatiblePC. For details see [11].
The model parameters were obtained using an identifica-tion procedure based on impedance measurements andarithmetic of intervals, as described in Ref. [11] where acomplete theoretical and practical identification procedure,applied to the hydrogen evolution reaction coupled toabsorption and diffusion, is presented. In such referencethere are two sets of identified parameters for the Vol-mer–Heyrovsky route, one leads to h near to zero andthe other one to h near to one, both sets are indistinguish-able by potential/current measurements. Permeation data[4] indicate that the true mechanism corresponds tok0
1 > k02, this was the set chosen for the state estimation pro-
cedure presented. They are k01 ¼ 0:5 s�1; k0
�1 ¼ 30 s�1;k0
2 ¼ 0:1 s�1; k0�2 ¼ 1:7� 10�3 s�1; k0
3 ¼ 1:5� 104 s�1;
k0�3 ¼ 4� 103 s�1; a1 ¼ 0:65; a2 ¼ 0:3; b ¼ 38:5; D ¼ 7�
10�5 cm2 s�1; �c ¼ 1:8� 10�7 mol cm�3; A ¼ 1 cm2; C ¼1� 10�9 mol cm�2. The values of parameters k0
1; k0�1;
a1; k03 and k0
�3 were obtained with errors lesser than 5%,while larger errors (around 70%) were reported for k0
2,k0�2, and a2. The error bounds of the identified parameters
depend on their sensibility with respect to the impedanceand also on the number of measured impedances at differ-ent frequencies and potentials. In the case under study fourmeasured impedance data sets in the range [0.058, 30 Hz]were used, with measured impedance error of approxi-mately 25% each. Diffusion of H atoms along the z direc-tion only is considered. The diffusion coefficient D is aparameter very sensible with the impedance then it canbe known with an error lesser than 2%.
The simulated system was space discretized in 50(N = 50) parts along the z direction, being Dz = 0.01 cm.

0 2000 4000 6000 8000 10000–0.04
–0.03
–0.02
–0.01
0
0.01
0.02
0.03
0.04
Time [sec.]
Pot
entia
l var
iatio
ns V
(t)
[Vol
t]
Fig. 3. Potential variations around V0 = �0.95 V.
0 2000 4000 6000 8000 10000–3.5
–3
–2.5
–2
–1.5
–1
–0.5
0
0.5
1
1.5x 10
–6
Time [sec.]
Cur
rent
[Am
p.]
Fig. 4. Current variations.
0 2000 4000 6000 8000 100000
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
Time [sec.]
Sur
face
con
cent
ratio
n θ
(t)
Fig. 5. Simulated and observed surface concentration.
6 B.E. Castro, R.H. Milocco / Journal of Electroanalytical Chemistry 604 (2007) 1–8
It is possible to reduce the step size of the spatial discreti-zation by increasing the number N of differential equationsin (13). As the number of slices increases the error betweenexact and spatial discretization solutions asymptoticallyreduces. In the example, using fifty elements the errorbetween the model simulations and the solution obtainedas N goes to infinity is insignificant. The model used forthe Kalman filter was discretized in only five elements(N = 5) giving a very good approximation to the exactsolution. Of course reducing the size of the spatial discret-ization of the model used in the Kalman filter the error willreduce until exact convergence. The initial conditions cor-respond to a surface hydrogen concentration of x(0, t) =0.059, and h(0) = 0.0164, corresponding to the equilibriumpotential Eeq = �0.926 vs Hg/HgO/same solution (ss) ref-erence electrode [14]. The boundary conditions correspondto J = 0 at z = 0.5 cm at the steel epoxy resin interface.Strictly this is not correct, as the epoxy resin is not com-pletely impermeable to H. However, permeability is lowerthan in steel [16] and the J = 0 assumption allows a simpleresolution of the transport equations adequate to illustratethe state estimation procedure presented. At z = 0 (surfaceof the electrode) Eq. (6) applies. Potential perturbationsaround V0 = �0.95 V were applied. The double layercapacitance Cdl = 5 · 10�5 F and Re = 0.1 X was consid-ered for the electrolyte resistance. The gains of theKalman’s filter were R = 10�4 and W = 10�5.
In the experiments the different model parameters wereobtained basically using impedance and periodic signals.Once the parameters were obtained, the model based Kal-man filter is used to carried out the state etimations. In thissecond stage the Kalman filter is able to estimate the statesby just measuring current and potential. The appliedpotential perturbation around V0 = �0.95 V is shown inFig. 3. The resulting current is shown in Fig. 4. In Fig. 5,the simulated and observed variations of surface concen-tration are depicted, the initial condition of the variablesin the Kalman’s filter is 0.02. In Fig. 6, simulated andobserved hydrogen concentrations at different penetrationdepths, z, are shown. The initial concentration values ofthe Kalman’s filter states were 0.3 reaching fast the desiredvalues. It can be seen that, in general, the observed vari-ables reach the simulated ones at different periods of time.This convergence-time depends on the values of R and W.
4.2. Spherical geometry
In the second example the potentiostatic discharge of ametal hydride electrode constituted by spherical alloy par-ticles of mean radius, Rp, is analyzed. The parameters ofthis system correspond to the data published in Ref. [12].The parameters of the system are k0
1 ¼ 1200 s�1;k0�1 ¼ 300 s�1; k0
2 ¼ 1:8� 10�3 s�1; k0�2 ¼ 7� 10�3 s�1;
k03 ¼ 5� 102 s�1; k0
�3 ¼ 5� 102 s�1; a1 ¼ 0:5; a2 ¼ 0:5;b ¼ 38:5; D ¼ 1:14� 10�9 cm2 s�1; �c ¼ 0:009 mol cm�3;Rp ðparticle radiusÞ ¼ 1� 10�3 cm; A ¼ 500 cm2; C ¼ 1�
10�9 mol cm�2. To solve the diffusion equations, the

0 2000 4000 6000 8000 100000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Time (sec.)
Hyd
roge
n co
ncen
trat
ion
xe(z
4,t)
xe(z
1,t)
x(z4,t)
x(z1,t)
Fig. 6. Hydrogen concentration for five discretization levels.
Fig. 8. Potential variations around V0 = �0.825 V.
Fig. 9. Current variations.
B.E. Castro, R.H. Milocco / Journal of Electroanalytical Chemistry 604 (2007) 1–8 7
spherical particles were discretized in different parts alongthe radius z. In the Fig. 7 it is shown the dynamical timeresponse of the hydrogen concentration by using differentapproximations. It is clear from the figure that the systemcan be reasonable represented using more than 10 spatialslicing. Using more than 30 spatial slicing there is notimprovements in the precision. In our simulations, thespherical particles were discretized in ten (N = 10) partsalong the radius z, being Dz = 1 · 10�4. The same spatialdiscretization was employed for both, the system and themodel used in the Kalman filter. The initial conditions ofhydrogen concentrations are x(0, t) = 0.8, h(0) = 0.8, corre-sponding to an equilibrium potential of Eeq = �0.925 vsHg/HgO/ss reference electrode [12]. The boundary condi-tion of flux J(zN+1,t) = 0 at z = Rp (centre of the alloy par-ticle). Potential perturbations around V0 = �0.825 wereapplied. The double layer capacitance was Cdl = 0.65 Fin accordance with the high interfacial areas associatedwith porous hydride forming electrodes, and Re = 0.1 Xwas considered for the electrolyte resistance. The potentialdistribution due to the porous nature of the electrode wasnot taken into account in this example.
0 20 40 60 80 10.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Tim
Hyd
roge
n co
ncen
trat
ion
x(z=3x10−4cm,t)
x(z=3x10−
x(z=0cm,t)
Fig. 7. Hydrogen concentration using different spatial
The applied potential perturbation around V0 = �0.825V is shown in Fig. 8. The resulting current is shown inFig. 9. In Fig. 10, the simulated and observed variationsof surface concentration are depicted. In Fig. 11, simulatedand observed hydrogen concentrations at different penetra-tion depths, z, are shown. The initial values of the Kal-man’s filter state is 0.65 for all the concentrations. Thevalues of R and W in Eqs. (20) and (21) are R = 2 andW = identity.
Finally, the state of charge (SOC) defined as [18]
SOCðtÞ ¼ 1
Qmax
Q0 þZ t
0
IðsÞds
� �¼XN�1
k¼0
bkxðzk; tÞ ð26Þ
00 120 140 160 180 200
e[sec.]
3cm,t)
.......... N=10_ _ _ _ N=20______ N=100
discretization to approximate the diffusion process.

Fig. 10. Simulated and observed surface concentration.
Fig. 11. Hydrogen concentration for five discretization levels.
Fig. 12. State of charge.
8 B.E. Castro, R.H. Milocco / Journal of Electroanalytical Chemistry 604 (2007) 1–8
where bk ¼ ðRp � zkÞ2=PN�1
i¼0 ðRp � ziÞ2;Q0; and Qmax arethe initial and maximum electrode charge. All are knownparameters and the estimated SOC(t) is shown in Fig. 12.
5. Conclusions
A state-variable observation of H-sorption electrochem-ical process coupled to diffusion, using measurements ofcurrent and potential, was presented in this paper. The pro-cedure is based on the state-space model description of the
system and on the approximation of the partial derivativesto a set of ordinary differential equations using the methodof lines. Using the measured current the nonlinear resultingmodel can then can be written as linear and time-variant.The Kalman’s filter was used as observer of the state-variables.
The procedure can be applied to a great variety of sys-tems bearing any geometry or boundary conditions. Inthe paper, the method was successfully applied to thehydrogen reaction on steel electrodes coupled to diffusionand also to a metal hydride electrode constituted by spher-ical alloy particles. By using the estimated states, the stateof charge – SOC – of the electrode can be computed easily,as it was shown in the case of hydrogen reaction in metalhydride. The convergence speed of the error estimationscan be tuned by changing the values of R and W in Eqs.(20) and (21). A reduced value of such parameters giveshigh gain, which reduces the convergence time butincreases the error due to the measurement noise.
References
[1] T.H. Fuller, J. Newman, in: R.E. White, J.O. Bockris, B.E. Conway(Eds.), Modern Aspects of Electrochemistry, vol. 27, Plenum Press,New York, 1993, p. 359.
[2] R.C. Stempel, S.R. Ovshinsky, P.R. Gifford, D.A. Corrigan, IEEESpectrum 35 (11) (1998) 29–34.
[3] L.O. Valøen, Metal Hydrides for Rechargeable Batteries, Thesis,Norwegian University of Science and Technology, Department ofMaterials Technology and Electrochemistry, March 2000.
[4] L.F.P. Dick, M.B. Lisboa, E.B. Castro, J. Appl. Electrochem. 32(2002) 883.
[5] B.E. Conway, G. Jerkiewicz, J. Electroanal.Chem. 357 (1993) 47.[6] D. Britz, Digital Simulation in Electrochemistry, second ed.,
Springer-Verlag, 1988.[7] A. Lasia, D. Gregoire, J. Electrochem. Soc. 142 (1995) 3393.[8] L. Jaulin, M. Kieffer, O. Didrit, E. Walter, Applied Interval Analysis
with Examples in Parameter and State Estimation, Robust Controland Robotics, Springer-Verlag, 2001.
[9] H.K. Khalil, Nonlinear Systems, Prentice hall, 1996.[10] B.D.O. Anderson, J.B. Moore, Linear Optimal Control, Prentice hall,
1971.[11] B. Castro, R. Milocco, J. Electroanal. Chem. (579/1) (2005) 113–123.[12] A. Lundqvist, G. Lindbergh, Electrochim. Acta 44 (1999) 2523.[13] J. Crank, The Mathematics of Diffusion, Oxford Univ. Press, New
York, 1975.[14] W. Lohstroh, R.J. Westerwaal, J.L.M. van Mechelen, C. Chacon, E.
Johansson, B. Dam, R. Griessen, Phys. Rev. B70 (2004) 165411.[15] K.J. Astrom, Introduction to Stochastic Control Theory, Prentice
Hall, 1970.[16] E.H. Stokes, Hydrogen Permeability of Polymers and Polymer-based
Composites, SRI-Eng-01-36-A392, July 2001, 72p.[17] M.R. Gennero de Chialvo, A.C. Chialvo, J. Electrochem. Soc. 1147
(2000) 1619.[18] O. Barbarisi, R. Canaletti, L. Glielmo, M. Gosso, F. Vasca, in:
Proceedings of the IEEE Conference on Decision and Control, LasVegas Nevada, USA, 2002.
[19] L.M. Silverman, H.E. Meadows, J. SIAM Control, Ser. A 5 (1) (1967)64–73.
Recommended