J. Ocean Eng. Mar. Energy (2015) 1:55–76DOI 10.1007/s40722-014-0006-y
RESEARCH ARTICLE
Simulation of floating structure dynamics in waves by implicitcoupling of a fully non-linear potential flow model and a rigidbody motion approach
E. Dombre · M. Benoit · D. Violeau · C. Peyrard ·S. T. Grilli
Received: 29 April 2014 / Accepted: 22 October 2014 / Published online: 13 November 2014© Springer International Publishing AG 2014
Abstract We demonstrate the accuracy and convergenceof a new numerical model solving wave-structure interac-tions based on the fully non-linear potential flow (FNPF)theory coupled to a rigid body motion approach. This workextends an earlier model proposed by Guerber et al. (EngAnal Bound Elements 36(7):1151–1163, 2012), restricted tofully submerged structures, by allowing to solve for freelyfloating bodies on the free surface. Although we are cur-rently extending the model to three dimensions (3D), thework reported here only considers two-dimensional (2D)problems. We first introduce the FNPF model, originallydeveloped in 2D by Grilli et al. (Eng Anal Bound Elements6(2):97–107, 1989), Grilli and Subramanya (Comput Mech17(6):374–391, 1996), and later extended to 3D by Grilliet al. (Int J Numer Methods Fluids 35(7):829–867, 2001).We present the implementation by Guerber et al. (Eng AnalBound Elements 36(7):1151–1163, 2012) in the 2D-FNPF
E. Dombre (B) ·M. Benoit · D. Violeau · C. PeyrardSaint-Venant Hydraulics Laboratory, Université Paris-Est (EDFR&D, ENPC, Cerema), 6 quai Watier, 78400 Chatou, Francee-mail: [email protected]
M. Benoite-mail: [email protected]
D. Violeaue-mail: [email protected]
C. Peyrarde-mail: [email protected]
S. T. GrilliDepartment of Ocean Engineering, University of Rhode Island,Narragansett, RI 02882, USAe-mail: [email protected]
model of van Daalen’s implicit method for fluid-structureinteractions [see van Daalen (Numerical and theoretical stud-ies of water waves and floating bodies, PhD thesis, Univer-siteit Twente, The Netherlands 1993) and Tanizawa (Pro-ceedings of 4th Osaka colloquium on seakeeping perfor-mance of ships 2000)]. We then detail the numerical schemeused for coupling the FNPF model to the motion of a floatingrigid body. Moreover, we propose a new numerical strategyfor advancing the free surface front inspired by symplec-tic integrators, which achieves a much better performancefor energy conservation. The developed algorithm is firstapplied to forced motion cases, for which analytical andexperimental results can be found in the literature and usedas benchmarks. The accuracy of the numerical solution forthe fluid and applied forces is then discussed for cases withsmall or large amplitude motion. In the latter case, a pre-liminary investigation of non-linear effects is performed forthe classical application of a semi-circular heaving cylin-der, by comparing the computed hydrodynamic force to theexperimental measurements of Yamashita (J Soc Nav Arch141:61–70, 1977). In particular, the comparison of the mag-nitude of the force harmonics, up to the third order, showsthe importance of simulating non-linear interactions, whichbecome important as the ratio of the radius of the cylinderover the wavelength increases. In a second set of applica-tions, we assess the model accuracy in dealing with freelyfloating bodies. As a first test case, we consider the decay-ing motion of a freely heaving horizontal circular cylinderreleased from a non-equilibrium position above the free sur-face. In this more demanding computations, we verify thattotal energy fluid-plus-body motion is well conserved, whichconfirms the accuracy of the fluid-structure interaction algo-rithm. As a second test case, we consider the free motionof a rectangular barge in waves and compute the first-orderresponse amplitude operators.
123

56 J. Ocean Eng. Mar. Energy (2015) 1:55–76
Keywords Wave-body interactions · Non-linear wave ·Numerical wave tank · Floating bodies · Boundary elementmethod ·Wave forces
List of symbols
� f (t) Volume of fluid at time t∂� f (t) External boundary of the fluid at time t� f (t) Set of free surface points at time t�b Bottom boundary�l Set of lateral boundaries of the domain
� f (t)�c(t) Wetted surface of the body boundary at time
tv Fluid velocity vectorφ Velocity potential such that ∇φ = vφt Eulerian time derivative of φ, φt = ∂φ
∂tx Position vectorvb(x) Solid velocity vector at the point xNel Number of boundary elementsNdof Number of degrees of freedomNb Number of degrees of freedom on the body
surfaceG Green’s function, fundamental solution of
the Laplace equationd·dt Lagrangian time derivationxG(t) Position vector of the center of mass of the
bodyxG(t) Velocity vector of the center of mass of the
bodyxG(t) Acceleration vector of the center of mass of
the bodyn(x, t) Unit outward normal vector to the fluid
boundary ∂� f (t) at point xnb(x, t) Unit inward normal vector to the body
boundary �c(t) at point xpa Atmospheric pressurex f (t) Set of free surface nodes belonging to
� f (t) ∩ �c(t)xb(t) Set of body surface nodes belonging to
� f (t) ∩ �c(t)Nd Number of element of the set � f (t)∩�c(t)φ f (t) Function such that φ f (t)(x, t) is the Dirich-
let condition on the free surface at point xand at time t
(ek)k=1...3 Canonical basis of R3 such that e1 = ex ,
e2 = ey and e3 = ez
Ox Horizontal axisOz Vertical axisOy Transverse axisfk k-th component of the vector f , fk = f · ek
Xt Transformation which maps the initialdomain � f (0) on � f (t)
ρ Density of the fluidF(ti ) = Fi Hydrodynamical force acting on the body
at time tiF∗i,0 Prediction of the hydrodynamical force act-
ing on the body at time ti made at iterationi − 1
ai j Added mass coefficient in the i directiondue to a motion in the j direction
bi j Damping coefficient in the i direction dueto a motion in the j direction
cn Fourier coefficient of order ng Acceleration of gravityFi,k Hydrodynamical force acting on the body at
time ti and sub-iteration k in the Newmarkscheme
1 Introduction
The numerical modeling of the interactions of floating struc-tures with waves is very challenging, particularly when onewishes to include in the model both the full non-linearity ofthe free surface boundary conditions as well as large motionsof the structure, yielding a possibly highly non-linear behav-ior of the equations of motion, even using simplified fluidmodels such as fully non-linear potential flow (FNPF). Fora long time, for efficiently predicting both body motion andforces, the engineering design practice has focused on lin-earizing free surface boundary conditions in the FNPF modelas well as assuming small body motions. The use of an invis-cid model was typically compensated by introducing a vis-cous drag force based on semi-empirical formulations suchas Morison’s equation.
However, the use of such simplified models is often lim-ited to the order-of-magnitude computation of upper boundsof important parameters, such as the steepness and the ampli-tude of the motion. For the innovative floating structures thatare being considered for new applications in ocean renewableenergy, such as floating wave energy converters or floatingoffshore wind turbines, these simplifying hypotheses couldsignificantly affect the eventual design, perhaps making it toosturdy and costly in some cases, or worse unsafe in others.
In the realm of academic research, since the late 1980s,more advanced and complete models such as FNPF have beendeveloped and used, typically based on a higher-order bound-ary element method (HO-BEM) (e.g., Grilli et al. 1989; Grilliand Subramanya 1996). However, despite a constant increasein computational resources, the coupling of such FNPF mod-els with floating rigid body motion has been mostly stud-ied for two-dimensional (2D) geometry; recent contribu-tions in this respect are based on a BEM solver and a force
123

J. Ocean Eng. Mar. Energy (2015) 1:55–76 57
decomposition method (Koo and Kim 2004, 2007; Tanget al. 2011). Other numerical methods were also applied,such as the finite element method (FEM) with an arbitraryLagrangian Eulerian (ALE) formalism to follow the inter-nal points in a 2D numerical wave tank (Yan and Ma 2007);the latter approach was extended to 3D geometry (Ma andYan 2009). These authors used a direct approach for eval-uating the boundary conditions; by contrast, here, we willuse an implicit model, based on the earlier work by Guer-ber et al. (2012), who implemented van Daalen’s (1993) andTanizawa’s (2000) implicit method in Grilli et al.’s 2D-FNPFmodel (Grilli et al. 1989; Grilli and Subramanya 1996) tostudy the interactions of a fluid with fully submerged struc-tures.
Some 3D models solving wave-structure interactions forfloating rigid bodies have also been proposed, particularly,in the field of naval architecture. See, for instance, thework by Liu et al. (2001) or, more recently, by Wang(2005) who used a desingularized BIE method on unstruc-tured grids. Note that an early attempt at developing a 3Daxisymmetric model was proposed by Dommermuth andYue (1987). Applications with the panel method in forcedand free motion of a sphere were also found in the work ofBerkvens (1998).
Regarding floating bodies without forward speed, Bai andEatock Taylor (2006) studied an oscillating cylinder as wellas a bottom mounted cylinder using a HO-BEM. Later, theseauthors also considered the case of flared structures for bot-tom mounted and truncated cylinder in Bai and Eatock Tay-lor (2009), using an auxiliary method for coupling the fluidand the solid. The different modes of body motion weremore specifically studied in a recent paper by Zhou et al.(2013). For completeness, numerical models based on the fullNavier–Stokes equations were also proposed in 2D (Rahmanet al. (2006); Hadžic et al. (2005); Ghasemi et al. (2014)) and,in particular, wave impact on structures in regular and irreg-ular waves was also investigated in Li and Lin (2012). Butthe accurate direct solution of Navier–Stokes equations fornon-linear wave-structure interaction problems, particularlyin 3D, still remains a computationally formidable task thatposes greater numerical difficulties than when using potentialflow theory.
Here, we study wave-structure interactions for floatingrigid bodies, using a FNPF model, by extending the workof Guerber et al. (2012), who studied freely moving sub-merged rigid structures. In the latter work, it was observedthat, when the submerged body moved close to the free sur-face, numerical problems occurred that reduced the modelconvergence and accuracy and, hence required special atten-tion in the numerical implementation. In this paper, we willinvestigate whether similar problems also occur when thefloating body is attached to the free surface. Although thispaper is limited to 2D problems, this work is a preliminary
step since our main goal is to develop this method in 3D,based on the 3D-FNPF model by Grilli et al. (2001).
As compared to earlier methods discussed above, thepresent model relies on a fully Lagrangian scheme for updat-ing both the free surface and the body geometry. To ensureaccuracy in the BEM, at each time step, free surface dis-cretization nodes of the FNPF model are regridded to equalspacing (curvilinear in 2D). As observed in earlier applica-tions of this 2D-FNPF model, the high accuracy and stabilityof numerical results make it possible computing the bodymotion for a long time, without experiencing instabilitiesthat would otherwise require smoothing, as done in mostother similar models (e.g., Koo and Kim 2004). Moreover,the fluid-structure coupling through the hydrodynamic force,is based on a fully implicit scheme. The use of the auxiliarymethod was found in Koo and Kim (2004), and a direct eval-uation of the dynamic boundary condition on the solid wasfound in Yan and Ma (2007). For the case of the forced heav-ing motion of a 2D horizontal cylinder, results of our modelare compared with the experiments of Yamashita (1977).
The paper is organized as follows. In Sect. 2, we presentthe model governing equations and their numerical imple-mentation. Then, we present in Sect. 3 the comparison ofnumerical results to linear, weakly non-linear, as well asexperimental results, for the forced heaving motion of a 2Dcylinder. The special interest of having a fully non-linearmodel will be outlined. The sway motion of a rectangu-lar body is addressed in Sect. 4. In Sect. 5, we study themodel convergence properties for free decay tests of a float-ing circular cylinder, for which a semi-analytical solution dueto Maskell and Ursell (1970) is available. Many numericaland physical parameters will be varied, to assess the sen-sitivity of the model solution. Finally, we assess in Sect. 6the capability of the model to predict the free motion of arectangular barge in waves.
2 Governing equations
In the following, we use notations and definitions intro-duced in earlier publications of the 2D-FNPF model (Grilliet al. 1989; Grilli and Subramanya 1996; Guerber et al.2012; see also the definition section). Thus, the boundaryof the fluid domain ∂� f (t) is divided into four parts, onwhich different types of boundary conditions can be applied,∂� f (t) = � f (t) ∪ �c(t) ∪ �b ∪ �l(t), with � f (t) denotingthe free surface, �c(t) the rigid body surface, �b the bottomsurface and �l(t) the lateral boundaries. The bottom bound-ary �b is assumed to be time independent.
2.1 Mathematical model and assumptions
We assume the fluid to be incompressible and inviscid andthe flow to be irrotational. This ensures the existence of a
123

58 J. Ocean Eng. Mar. Energy (2015) 1:55–76
scalar velocity potential φ, such that the flow velocity is,v = ∇φ. In all cases, the potential φ must satisfy mass con-servation, expressed as a Laplace equation within the entirefluid domain � f (t). Moreover, by considering the successivetime derivatives of this equation (denoted by a superscript),it is easily seen that φ(k) (k = 1, . . .) is also harmonic.
Denoting by G(x, y) = − 12π
log(‖x−y‖) the fundamen-tal solution of the Laplace equation in 2D (i.e., R
2), andapplying Green’s divergence theorem (see e.g., Grilli andSubramanya 1993; Bonnet 1995), the Laplace equation isrecast as a Fredholm equation of the second kind:
c(x, t)φ(x, t)
=∫
∂� f (t))
[∂φ
∂n(y, t)G(x, y)− φ(y, t)
∂G
∂n(x, y)
]dSy (1)
where the function c(x, t) denotes the fraction solid angleseen from the boundary point x, e.g., for a regular portionof the boundary ∂� f (t), we have c(x, t) = 1
2 . This BIE isamenable to a numerical solution by a BEM.
Two boundary conditions apply at the (time varying) freesurface. The first one expresses the continuity of the pressureat the free surface p = pa on� f (t), pa being the atmosphericpressure, which is known as the dynamic free surface bound-ary condition. Additionally, a second boundary condition, thekinematic free surface boundary condition, must also be sat-isfied on � f (t), which states dx
dt = ∇φ. The latter conditionexpresses that water particles belonging to � f (t = 0) remainon � f (t) for any given time t > 0.
On the solid boundary of the floating body, �c(t), we spec-ify a free-slip condition, which expresses the normal deriva-tive of the potential, equal to the normal fluid velocity as:
φn(x, t) = ∂φ
∂n(x, t) = vb(x, t)·nb(x, t) (2)
where nb(x, t) denotes the unit normal vector pointinginward to the solid surface �c(t), at point x, vb(x, t) = x isthe body velocity, with the upper dot denoting the Lagrangiantime derivative following the body motion, d·
dt and · denotesthe usual Euclidian scalar product. This condition remainsvalid on the fixed bottom and lateral boundaries, �b ∪ �l ,using a zero velocity, i.e., ∂φ
∂n = 0.The above set of equations can be recast as the following
boundary value problem:
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
Find φ such that:
c(x, t)φ(x, t)
=∫
∂� f (t)
[φn(y, t) G(y, x)− φ(y, t)
∂G
∂n(y, x)
]dSy
φ = φ f (t) on � f (t)
φn = 0 on �b and �l
φn = x·n on �c(t) (3)
φ f (t) is the value of the potential on the free surface � f (t),whose geometry and kinematics are assumed to be known atinitial time t = 0. For later time, these are computed in thenumerical model, using the time-stepping scheme presentedin Sect. 2.2.
As reported by many authors, the use of a finite differencescheme for evaluating the time derivative of the potentialtends to be numerically unstable (Koo and Kim 2004; Yan andMa 2007). Following Guerber et al. (2012), instead, we applythe same BIE technique for computing φt , which satisfiesthe same field equations. This function has no direct physicalinterpretation unlike the acceleration potential φt+ 1
2∇φ·∇φ,whose gradient is equal to the fluid acceleration dv
dt as pointedout by Tanizawa (1995). However, it has the advantage to bealso solution of Laplace equation, which makes it compu-tationally efficient to solve. Besides, in the time steppingschemes used here (see Sect. 2.2), we need to compute φt
anyway, so this does not add to the computational effort. Tocomplete the set of equations, however, we need to expressthe corresponding boundary conditions satisfied by φt on thevarious boundaries.
We first note that taking the material derivative of the free-slip condition (2) yields the following relationship on �c(t):
x·n + x·dndt=
(∂∇φ
∂t+ x·∇∇φ
)·n + ∇φ·dn
dt(4)
which gives, after reordering the terms, the following Neu-mann boundary condition on the body boundary:
∂φt
∂n(x, t) = dn
dt· (x − ∇φ)+ x·n − x· (∇∇φ·n) (5)
The assumption of rigid body motion yields, x = xG +θG × (x − xG), where xG is the location of the body centerof mass and θG is the body rotation vector. Here the advec-tion velocity is the body velocity, but alternative numericalschemes could use the fluid velocity instead.
By applying the unsteady Bernoulli theorem, it is possibleto derive the following partial differential equation, whichmust also be satisfied by the potential in � f (t):
∂φ
∂t+ 1
2∇φ·∇φ + gz = − 1
ρ(p − pa) (6)
The Dirichlet boundary condition for φt on the free surfacethus directly follows from the dynamic free surface boundarycondition as:
∂φ
∂t= −1
2∇φ·∇φ − gz (7)
Following Grilli and Subramanya (1996), in the 2D-HO-BEM model, both the potential and its normal derivative (aswell as their time derivative) are discretized by higher-orderelements, here, both cubic. This allows computing gradients,
123

J. Ocean Eng. Mar. Energy (2015) 1:55–76 59
such as in the previous equations, by taking the derivative ofthe shape functions within each boundary element. Specifi-cally, we use so-called mixed cubic interpolation (MCI) ele-ments, in which geometry is modeled by cubic splines andfield variables are interpolated between each pair of nodes,using the mid-section of a four-node “sliding” isoparametricelement.
Thus, assuming that the potential is known from the solu-tion of the first problem and its gradient is numerically com-puted as detailed above, the second BIE problem for φt canbe put in the same form as Eq. (3):
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
Find φt such that:
c(x, t)φt (x, t)
=∫
∂� f (t)
[φt,n(y, t) G(y, x)− φt (y, t)
∂G
∂n(y, x)
]dSy
φt = − 12∇φ·∇φ − gz on � f (t)
φt,n = 0 on �b and �l
φt,n = dndt · (x − ∇φ)+ x·n − x· (∇∇φ·n) on �c(t)
(8)
where φt,n stands for ∂2φ∂n∂t .
2.2 Time updating
The main flow chart of the 2D-BEM model solving wave-structure interactions is summarized in the Algorithm 1.
2.2.1 Free surface time stepping
For time updating the free surface and the potential, we pro-pose to study the effect of two different schemes. The firstone is the explicit second-order Taylor series, as used in theoriginal 2D-FNPF code of Grilli and Svendsen (1990). Thisscheme has been widely validated for non-linear waves prop-agation purposes (Grilli et al. 2001) and is known to allowfor larger time step than a first-order Euler scheme. In thisexplicit scheme, the new values of the potential φ and theposition x at time ti+1 may be expressed as follows:⎧⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎩
φi+1(xi+1, ti+1) = φ(xi , ti )+ dφdt (xi , ti )t
+ d2φ
dt2 (xi , ti )t2
2
xi+1 = xi + dxdt (x
i , ti , φi , φin)t
+ d2xdt2 (xi , ti , φi , φi
n)t2
2
(9)
As mentioned by Dias and Bridges (2006), taking intoacount the Hamiltonian structure of the equations may leadto a better performance of the algorithm for long time simu-lations. We thus propose to use a first-order scheme inspiredby symplectic integrators:
⎧⎪⎪⎪⎨⎪⎪⎪⎩
φi+1(xi+1, ti+1) = φ(xi , ti )+ dφdt (xi , ti )t
φni+1(xi+1, ti+1) = φn(xi , ti )+ dφn
dt (xi , ti )t
xi+1 = xi + dxdt (x
i , ti , φi+1, φi+1n )t
(10)
Using free surface conditions and denoting by φs the tan-gential derivative of the potential, we can further expand thefirst two expressions of Eq. (10) into:⎧⎨⎩
φi+1 = φi +t (φit + φi
sφis + φi
nφin)
φni+1 = φi
n +t(φi
tn + φisnφi
n + φin
(1Ri φ
in − φi
ss
))
(11)
where we made use of expressions given in Grilli and Subra-manya (1993) for expressing the second-order normal deriv-ative φnn with respect to the curvature 1
R and the second-order tangential derivative φss . As can be seen in Eq. (10),this integrator uses new information on the potential and itsnormal derivative φi+1 and φi+1
n at time ti+1 to update theposition to xi+1. However, the spatial derivatives are takenon the geometry at time ti . Although we have no proof thatthe newly proposed scheme (10) possesses the properties ofsymplectic integrators (as defined by Lew et al. 2004), it willbe referred to as symplectic-like scheme in the following.Similar schemes are known to have good energy-conservingproperties on the long term, and have been widely used, e.g.,in celestial mechanics and mechanical engineering (Lew etal. 2004).
2.2.2 Body boundary time stepping
We denote by F the force due to the total pressure acting onthe body surface and by X the 6 components vector definedsuch that Xk = xGk , for k = 1 . . . 3 and Xk = θGk fork = 4 . . . 6. The pressure has the following definition:
p = −ρ
(gx3 + 1
2∇φ·∇φ + φt
)(12)
For coupling the equation of motion to the fluid potentialsolver, we use a predictor–corrector scheme combined with asecond-order Newmark scheme for the generalized velocityX and the position X of the center of gravity which reads:⎧⎪⎨⎪⎩
Xi+1,k =M−1F∗i+1,k
Xi+1,k = Xi +t((1− β) Xi + γ Xi+1,k
)Xi+1,k = Xi +tXi + t2
2
(( 12 − β
)Xi + γ Xi+1,k
)(13)
where F∗i+1,k is the force correction in the sub-iteration num-ber k and M is the mass matrix of the body. The predictor–corrector scheme is initialized with a cubic extrapolationof the force exerted on the body at next time step ti+1.The Newmark scheme has the advantage to better preservethe energy of conservative mechanical systems (see Kane
123

60 J. Ocean Eng. Mar. Energy (2015) 1:55–76
1999) as compared to the classical fourh-order Runge–Kuttamethod. Besides, no sub-step is required for this scheme.
Between two sub-iterations, the boundary conditions forthe Laplace problems are modified to take into account thenew position and velocity of the solid:⎧⎪⎨⎪⎩
φi+1,kn = (x·n)
(Xi+1,k, Xi+1,k
)φ
i+1,ktn = ( dn
dt · (x − ∇φ)+ x·n − x· (∇∇φ·n))
(Xi+1,k, Xi+1,k, Xi+1,k
) (14)
First, expressing the boundary condition on φtn in a localcurvilinear coordinates system leads to the following formu-lation, as derived by Cointe (1989):
φtn = x·n + (x · s− φs) θG −(
1
Rφs + φsn
)
x · s+(
φss − 1
Rφn
)x · n (15)
Based on these considerations, two numerical strategiesmay be adopted.
Implicit method. The first one follows the method usedin Guerber et al. (2012) which is based on original worksof van Daalen (1993) and Tanizawa (1995). The accelera-tion X is replaced in the Eq. (5) by the hydrodynamic forcewhich makes it possible to express φt as a solution of anotherboundary integral problem whose support is restricted to thewetted body surface. This relationship takes the form:
φtn(x)+∫
∂�b∩� f
K (x, y)φt (y)dSy = γ (x), on ∂�b(t)
(16)
in which K is a symmetrical kernel depending only on therigid body geometry. For the expression of the function γ andK , we refer to the work of Guerber et al. (2012). This extraintegral equation may be incorporated in the influence matrixof the Laplace equation for more computational efficiency.
Direct method. From the expression derived by Cointe(1989), we also can use directly the acceleration given bythe Eq. (13) for computing the new body boundary conditionφtn . In this case, no modification of the influence matrix isneeded. A similar numerical scheme has been recently usedin Yan and Ma (2007).
2.2.3 Treatment of intersections between body and freesurface
In the BEM implementation, a double-node technique (Grilliand Svendsen 1990; Tanizawa 2000) is used to represent allintersection points between various parts of the boundary,including the solid body and the free surface. Such nodeshave the same coordinates but are associated with two setsof unknowns, and in particular two normal gradients of the
potential and its time derivative, with different normal direc-tions. Let us denote by x f (t) = (xi
f (t))i = 1...Nd the coordi-nates of Nd nodes belonging to the intersection of the free sur-face and the body surface at time t , � f (t)∩�c(t). In the BEMmodel, these nodes are a priori associated with the outwardnormal vector on the free surface, denoted by ni
f (xif (t), t).
For each of these nodes, according to the double-node tech-nique, we define a second set of nodes, xi
b(t), having thesame geometrical position but being associated with aninward normal vector on the body surface, ni
b(xib(t), t).
The nodes (xif (t))i = 1...Nd are moving according to Eq. (9),
while nodes (xib(t))i = 1...Nd are moving with the rigid body
motion.Due to the different trajectories of the free surface nodes
and the body nodes at the intersection, it is necessary to rede-fine, at each time level, the double-node sets x f (t) and xb(t).In our developments, two distinct schemes have been testedfor the determination of the new intersection points. In a firstscheme, we project the new intersection x f (t + t) in theorthogonal direction on the new body surface �c(t + t).The drawback, however, is that the value of φ(x f (t + t))cannot be easily inferred. In the second scheme, we linearlyextrapolate the position and the potential φ in the adjacentsegment of the body on the surface � f (t + t). More pre-
cisely, if we denote by x f−1i (respectively, xb−1
i ) the first
neighbor node of x fi on the free surface (respectively, xb
ion the body surface), we take the intersection between thestraight line (x f−1
i , x fi ) and the parametrization of the solid
geometry. This intersection procedure has been only testedfor elementary geometries such that the intersection betweenthe discretized free surface and body surface can be computedanalytically. For the case of a wall-sided cylinder (e.g., therectangular barge), the new intersection point is thus givenby the intersection of the straight line (x f−1
i , x f−1i ) and the
straight line (xb−1i , xb
i ). For the case of the circular cylindercentered in xG(t) and of radius R, we compute analyticallythe intersection of (x f−1
i , x fi ) with the circle C(xG(t), R).
Once the intersection has been computed, we extrapolate lin-early the value of φ from the values (φ(x f−1
i ), φ(x fi )). The
drawback of the latter scheme is that it is quite difficult to gen-eralize to a 3D geometry, while the first scheme has alreadybeen used in some 3D numerical wave tanks (Bai and EatockTaylor 2009; Zhou et al. 2013). In the present applications,the second scheme was found to be more stable for solidbodies with curved boundaries, such as the semi-circularhorizontal cylinder considered here, yielding a more regu-lar time history for each component of the force. For thisreason, results presented in the following are based on theextrapolation technique at the free surface. Note that also dueto numerical errors, the velocity at the double nodes can bediscontinuous. To avoid this discontinuity, Tanizawa’s veloc-ity compatibility condition (Tanizawa 1995) is applied to
123

J. Ocean Eng. Mar. Energy (2015) 1:55–76 61
both the velocity and the acceleration vectors. This conditionexpresses the uniqueness of the velocity vector of the fluidparticles x f (t), when expressed in the local basis attachedto the solid geometry or in the local basis of the free surfacegeometry. This is similar to the condition devised by Grilliand Svendsen (1990) in the 2D-FNPF model.
Algorithm 1 Main algorithm of the 2D-BEM model forwave-structure interactions.Require: � f (t = 0),φ(x, 0) ,φn(x, 0): initialization of domain geom-
etry and boundary conditions for the field variables1: for i = 1 to imax do2: Solve the BEM (φt , φtn)
3: Compute the body force: Fi4: if i>1 then5: Compute relative errors on force and moment: εn,06: while εn,k > 10−6 do7: Correction of the force F∗i,k+1 = F∗i,k + ω(Fi,k − F∗i,k)8: Update of the body dynamics with a (γ, β) Newmark scheme9: Solve BEM for φ and φt10: Compute the hydrodynamic force and moment: Fi,k+111: end while12: end if13: MEL technique for the free surface→ � f (ti+1) and body dis-
placement→ �c(ti+1)
14: Compute the intersection of � f (ti+1) and �c(ti+1)
15: Prediction of the force and moment at next time step: F∗i+1,0, usedas the initialization in the Newmark scheme.
16: Adaptation of the time step t to ensure a CFL condition(see Grilli and Svendsen (1990))
17: end for
3 Forced heaving motion of a circular horizontalcylinder
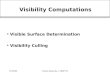
In this section, we solve the case of the forced heaving motionof a horizontal circular cylinder (in a finite computationaldomain represented in Fig. 1), to check the accuracy andconvergence of the numerical solution, including the hydro-dynamic force, with respect to a reference solution. Sincewe eventually aim at predicting the motion of freely floatingstructures, the accuracy of the force calculation is of primeimportance. For small to moderate amplitudes of motion,a reference solution can be obtained from linear or weakly
non-linear theory, although it is difficult in a finite lengthnumerical domain to simulate an infinite medium, such asassumed in the reference solutions.
More specifically, we consider the case of a semi-circularhorizontal cylinder of radius R, heaving with a forced har-monic motion. The amplitude of the cylinder motion is firstset to 0.01R, which generates a very small amplitude wavethat should compare well with the prediction from linear the-ory. We then compare the vertical force obtained from a directintegration of the computed pressure on the instantaneousbody wetted surface �c(t), to the first-order force predictedby linear theory. In our non-linear model, pressure is obtainedfrom the unsteady Bernoulli equation (6).
For 2D problems, the hydrodynamic pressure force andmoment applied to the floating body at time ti are given by:
Fk(ti ) =∫
�c(ti )−ρ
(gy3 + φt (y)+ 1
2v2(y)
)
×nk(y)dSy, k = 1 . . . 3
Fk(ti ) =∫
�c(ti )−ρ
(gy3 + φt (y)+ 1
2v2(y)
)ek
·{(y− xG(ti ))×n(y)}dSy, k = 4 . . . 6 (17)
where v2 = ∇φ·∇φ.The last three components of the vector F ∈ R
6 are thethree components of the moment in the basis (e1, e2, e3). Ina second stage, for larger amplitudes of motion up to 0.2R,we assess the model’s ability to compute higher-order com-ponents of the force exerted on the cylinder.
In all cases, the conservation of the volume is computedas a function of the discretization. Finally, the L2 norm errorof various variables computed in the model is estimated byalso computing the solution at internal nodes.
3.1 Computational domain and simulation methodology
We study the forced harmonic heaving motion of a rigid float-ing body, from a state of rest, which can be representedby the motion of its center of mass given by, xG3(t) =xG3(0) + A sin(ωt), with A selected between 0.01R and0.2R. As noted before for wavemakers started from a stateof rest (Grilli and Subramanya 1996), at t = 0 there is a dis-crepancy between the initial (finite) velocity of the heaving
Fig. 1 Sketch of the 2D modelcomputational domain at initialtime, for the forced heavingmotion of a horizontalsemi-circular cylinder of radiusR in water depth d. Numbersindicate the codes associatedwith each type of boundary,with boundary conditionsmarked on the figure
Lx
R
d
φn = 0
φn = 0φn = 0
φ = φf φ = φf
Δφ = 0
123

62 J. Ocean Eng. Mar. Energy (2015) 1:55–76
body and that of the free surface nodes. If large, this incom-patibility can trigger high wave number instabilities. To limitthis problem, the body is gradually set in motion accordingto the following equation:
xG3(t) = xG3(0)+ D(t)A sin(ωt), t ≤ tramp (18)
where D(t) is a ramp function defined by:
D(t) =tanh{C( t
tramp− 1)} + tanh C
cosh{C( ttramp− 1)} (1+ tanh C)
(19)
where the constant C is set to C = 2.3025 and the ramp-uptime tramp = 5T , with T = 2π/ω the period of the heavingmotion. A typical geometry of the computational domain isshown in Fig. 1. The rigid floating body is located in the mid-dle of a 2D wavetank of length Lx and depth d. At the tankextremities, in the absence of an exact radiation condition,we use a full reflective wall by setting the Neumann condi-tion φn = 0 (left and right boundaries in Fig. 1). A uniformspace step between nodes x is used over the whole bound-ary of the computational domain. As in earlier work (Grilliand Subramanya 1996; Guerber et al. 2012), time step tis automatically selected in the model, based on an optimalmesh Courant number, C0 = c t/x = 0.45, where c isthe dominant wave celerity.
To eliminate reflection from sidewalls, which would even-tually affect the force computation, following Bai and EatockTaylor (2006), we specify absorbing beaches over a length of2λ from each wall, where λ is the characteristic wavelengthof the waves radiating from the heaving body. In the absorb-ing beaches (AB), an “absorbing” free surface pressure isadded to the dynamic free surface boundary condition (6),leading to:
dφ
dt= −gz + 1
2∇φ · ∇φ − ν(x)φ (20)
Similarly, a dissipative term is also introduced in the pro-jection of the kinematic free surface boundary consition onthe vertical axis, and is defined like so:
dz
dt= φz − ν(x)z (21)
where the damping coefficient has the following definition:
ν(x) =⎧⎨⎩
ω(
x1−xABlAB
)2x1 ≥ xAB
0 x1 < xAB
(22)
where xAB is the coordinate on the horizontal axis at theentrance of the beach and lAB denotes the length of the beach.The performance of the absorption has been measured forN f = 30 nodes per wavelength, by computing the reflectioncoefficient K defined as:
−0.02
0
0.02
0.04
0.06
0.08
0.1
10 15 20 25 30 35 40
Hm
ax−
Hm
in
Hm
ax+
Hm
in
t+
lAB = 2λ
lAB = 4λ
lAB = 3λ
Fig. 2 Forced oscillation of a circular cylinder: evaluation of the reflec-tion coefficient K for A = 0.01R according to the size of the beach lAB
K = Hmax − Hmin
Hmax + Hmin(23)
where Hmax (respectively, Hmin) denotes the maximum(respectively, the minimum) wave height in an area betweenthe body and the entrance of the absorbing beach. The effi-ciency of this absorbing system is evaluated with the smallamplitude A/R = 0.01, which gives rise to a regular wavepattern. In this case, the coefficient K is computed for threedifferent lengths of the AB beach and is represented in Fig. 2.The efficiency of the AB beach appears not to be sensitive toits length, as each configuration leads to a coefficient K closeto 4 %. Furthermore, it is observed that the present systemprovides a constant damping for long-term simulations, whenmonochromatic waves are to be simulated. Based on thesetests, the numerical wave tank is equipped on both sides by abeach of length lAB = 2λ for forced motions computations.
We study the convergence of the numerical solutiontowards the reference solution, for a given angular frequencyof motion ω, such that ω2 R/g = 1.0. In deep water, thisnon-dimensional frequency is equal to k R, i.e., it is propor-tional to the ratio between the width of the body at the freesurface and the deep water wavelength λ0 = 2π/k (with kthe wavenumber), of the radiated waves caused by the bodyheaving motion. The computational domain length is selectedsuch that Lx � λ0, typically Lx = 10λ0. In general, the lin-ear dispersion relationship reads, ω2 = 2π
λg tanh 2π
λd. In the
applications, the NWT is set to d = λ0, which more than sat-isfies the usual deep water wave condition. To compare ourresults with the results of Kent (2005), which are presentedin non-dimensional form, the acceleration of gravity is setto g = 1 m2/s, the fluid density to ρ = 1 kg/m3, and thecylinder radius to R = 1 m; in this case, λ0 = 2π ≈ 6.28 m.Results are plotted with respect to the non-dimensional timet+ = t/T . To assess the long-term behavior of the numerical
123

J. Ocean Eng. Mar. Energy (2015) 1:55–76 63
scheme and verify results for volume conservation, simula-tions are carried out up to tmax = 15T (t+max = 15).
Because the absorbing beaches cover a length 2λ at eachextremity of the NWT, wave-structure interactions can bestudied over the central part of the domain of length 6λ. Toassess the effects of the absorbing beaches, simulations willbe repeated in some cases without the absorbing pressure. Itwill be seen that wave reflection has a very significant impacton the conservation of global quantities such as the total fluidenergy, denoted E f (t), and the total fluid volume, denotedV (� f (t)).
We solve the forced heaving problem for seven differentmeshes, whose characteristics are detailed in Table 1. Eachmesh was selected such that, when the body and the free sur-face are at rest, the space step is uniform on the boundary.However, given the temporal character of our simulations,the grid size is kept constant only within each part of theboundary. As indicated before, after each iteration, regrid-ding is applied to the free surface boundary to prevent BEMnodes from getting too close from each other on the freesurface, which is known to trigger high wave-number insta-bilities (see Dommermuth and Yue 1987; Grilli and Svendsen1990). To this end, the length of each part of the boundary,represented by piecewise cubic splines (respectively, linearfunctions) for the free surface nodes (respectively, for thebody nodes) is first computed and the nodes are redistributeduniformly.
3.2 Numerical error on volume conservation
For each simulation, with parameters listed in Table 1, theconservation of the computational domain volume is assessedas a function of the discretization (parameter N f ) withand without absorbing beaches. Without absorption in thebeaches, the total fluid energy in the NWT will keep increas-ing, owing to the external forcing of the rigid body motion,which acts as a wavemaker. This will cause wave steep-ness to keep increasing, as reflected waves combine withincident waves, eventually leading to strong non-linearityand overturning, which will gradually affect the numerical
accuracy. Note that the entrance of the beach is located atxAB = 2λ0 = 4π .
Figure 3 shows the time evolution of the relative errorin total volume conservation during 15 periods of heavingmotion, for three different discretizations, two amplitudesof motion, for weakly non-linear A/R = 0.01 and stronglynon-linear A/R = 0.2 waves, and with or without absorb-ing beaches. For small amplitude motion, the first-ordersymplectic-like scheme achieves an error of nearly O(10−7)
which is 2 order of magnitude better than the explicitsecond-order Taylor series. Moreover, with the symplectic-like scheme, this error is not increasing after 15 periods. Forthe second-order explicit Taylor series, the use of an absorb-ing beach seems to reduce the relative error on the volume,which does not occur when using the symplectic-like scheme.This suggests, that the later scheme has better properties forconserving the volume. For each time stepping, the simula-tion of the larger amplitude motion A/R = 0.2 gives a conser-vation of the volume 2 order of magnitude worse than withthe small amplitude A/R = 0.01.
This error analysis indicates that, for large wave steep-ness or cylinder amplitude of motion, the second-order Tay-lor time stepping with MCI BEM elements on the free sur-face, does not conserve volume well enough and may thusbecome inaccurate, as time increases. Although errors onvolume increase with time, in all cases, except at the verybeginning of simulations, this increase is monotonous, likelydue to the use of the regridding method on the free surface.For large amplitude of motion, as energy is fed into the wave-tank and wave steepness increases, the initial discretizationbased on a flat free surface may become too coarse as com-pared to the initial stages of computations, which may resultin increased numerical errors.
3.3 Numerical error on hydrodynamic force calculation
We now analyze the relative numerical error on hydrody-namic force calculation with respect to a known referencesolution (index ref), as a function of the domain discretizationand other parameters of the problem. For each discretizationN f listed in Table 1, we define the relative error on the force
Table 1 Forced heaving motion of a circular cylinder: discretization used in the model for the convergence study
λ/x = N f 10 20 30 40 50 60 80
x = 2π/N f 0.63 0.32 0.21 0.16 0.12 0.10 0.08
Nc 10 10 15 20 25 30 40
Nel 224 444 669 894 1,119 1,344 1,794
Ndof 231 451 676 901 1,126 1,351 1,801
For the selected parameters, λ = λ0 = 2π , Ndof denotes the total number of BEM nodes (or degrees of freedom) and Nel the total number ofboundary elements. N f is the number of BEM nodes per dominant wavelength and Nc is the number of BEM nodes discretizing the half-cylinderboundary
123

64 J. Ocean Eng. Mar. Energy (2015) 1:55–76
Fig. 3 Forced oscillation of acircular cylinder: time evolutionof the relative error of volumeV (t)−V0
V0in log10 scale as a
function of the discretization N f(varying from 20 to 60 from leftto right) as a function of: (i) theamplitude of motion A (from thetop A/R = 0.01 to the bottomA/R = 0.2); (ii) with or withoutabsorbing beaches; and (iii) thetime-stepping (scheme Asecond-order explicit timestepping; scheme B first-ordersymplectic-like time stepping)
-9
-8
-7
-6
-5
-4
log 1
0(ε
V),
A=
0.01
R
Nf = 20
-9
-8
-7
-6
-5
-4Nf = 40
-9
-8
-7
-6
-5
-4Nf = 60
-8
-7
-6
-5
-4
-3
-2
-1lo
g 10(ε
V),
A=
0.2R
t
-8
-7
-6
-5
-4
-3
-2
-1
t
-8
-7
-6
-5
-4
-3
-2
-1
t
0 5 10 15+
0 5 10 15+
0 5 10 15+
scheme A AB beachscheme A no AB
scheme B AB beachscheme B no AB
modulus f as:
εN f (tn) =√{ fN f (tn)− fref(tn)}2
maxn { fre f (tn)2} (24)
where tn is the discrete time corresponding to the n-th timestep.
An indicator of the global error on the hydrodynamic forcecomputation, for a simulation lasting from time ti to time t f ,is finally defined by taking the average of the εN f (tk) fortk = ti to t f as:
εN f (ti , t f ) = 1
(n f − ni )
n f∑n=ni
εN f (tn) (25)
3.3.1 Small amplitude motion
Using absorbing beaches and a fine enough grid, we findthat the hydrodynamic force becomes quasi-periodic fromt/T = 5 to 10 (as can be seen in the test case of a rectangu-lar barge in sway motion in Fig. 8). The stable force signalbetween t/T = 5 and 10 is Fourier transformed into thefrequency domain, from which one can compute the stan-dard hydrodynamic coefficients of the body heaving motion,namely the added mass a33 and damping b33 coefficients.Let us recall that, to the limit of linear wave theory, these
coefficients satisfy the relationship:
F3(t) = −a33(ω)xG3(t)− b33(ω)xG3(t) (26)
which gives the amplitude of the force in phase with the bodymotion as, F in
3 = a33(ω)Aω2 and that of the force out ofphase with this motion as, Fout
3 = −b33(ω)Aω. During thetime interval under consideration, a33 and b33 are computedand made non-dimensional by the following transformation:a∗33 ← F in
3 /(ρ π2 ω2 R2) and b∗33 ← Fout
3 /(ρ π2 ω2 R2). The
hydrodynamic coefficients and the Fourier analysis in thefollowing are computed with the help of the software Scilab.Table 2 shows the values of these coefficients computed in ourmodel for various discretization N f , compared to other first-order values reported in the literature, by Kent (2005), Frank(1967), Porter (1960). A fairly good agreement is observedbetween all these first-order quantities and our results for thetwo finest discretizations (N f = 60 and 80).
Figure 4 illustrates the global convergence of the forcecomputation with the discretization, by computing the globalerror εN f (ti , t f ), defined by Eqs. (24) and (25), betweenti = 0.16T and t f = 19.7T (with T = 2π based on selectedparameters), as a function of N f = 20 to 60, using as a refer-ence value the force fN f computed for N f = 80. We see that,for a small amplitude motion, A/R = 0.01, the error decreasesas the discretization is refined, confirming the convergenceof our numerical scheme.
123

J. Ocean Eng. Mar. Energy (2015) 1:55–76 65
Table 2 Forced heaving motion of a semi-circular cylinder of radiusR in deep water: non-dimensional hydrodynamic coefficients (a∗33, b∗33)computed with our model using N f = 20–80 nodes per dominantwavelength (A/R = 0.01, ω2 R/g = 1.0), compared to reference valuesfrom the literature
N f = 20 (0.57353, 0.44863)
N f = 40 (0.59644, 0.42155)
N f = 60 (0.60063, 0.41302)
N f = 80 (0.60172, 0.40929)
Porter (1960) (0.58, 0.41)
Frank (1967) (0.62, 0.40)
Kent (2005) (0.582, 0.410)
−2.6
−2.4
−2.2
−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−1.8 −1.7 −1.6 −1.5 −1.4 −1.3 −1.2 −1.1 −1 −0.9
log 1
0ε n
log101
Nf= log10
Δxλ
A = 0.2R,ABm=1.843 ; c=0.961A = 0.2R,φn = 0m=1.563 ; c=0.767
A = 0.01R,ABm=1.891 ; c=1.019
A = 0.01R,φn = 0m=1.896 ; c=0.991
Fig. 4 Forced heaving motion of a semi-circular cylinder of radiusR in deep water: global error on the force computation as a functionof the discretization N f = 20 to 60. Results are computed over thetime interval ti = 0.16T to t f = 19.7T and the force reference valuefN f is that computed in the finest discretization with N f = 80. Thecoefficients m and c are determined by computing a least mean squaretrend line of equation y = mx + c for each set of points
The rate of convergence, in the least mean square sense,may be evaluated with an absorbing beach, as 1.891 for A/R= 0.01 and 1.843 for A/R = 0.2. Without absorbing beach,it takes the values 1.896 for A/R = 0.01 and 1.563 forA/R = 0.2. These values are quite satisfactory given the factthat we used linear elements for meshing the body geometryand the force depends on the solution on the body nodesonly. These computations highlight also the fact that the useof an absorbing beach may improve the accuracy of the forcecalculation at high amplitudes.
3.3.2 Large amplitude motion
We now similarly study the accuracy and convergence of thecomputation of the hydrodynamic force for a large ampli-tude of motion of the heaving cylinder. This problem wasexperimentally studied by Yamashita (1977), who tested a
Table 3 Forced heaving motion of a semi-circular cylinder of radius Rin deep water: Fourier coefficients of the hydrodynamic force
N f = 20 N f = 40 N f = 60 N f = 80
c0 0.05437 0.06375 0.06534 0.06629
c1 0.23299 0.23225 0.23159 0.23075
c2 0.01979 0.02234 0.02248 0.02232
c3 0.00031 0.00055 0.00034 0.00044
Results are computed over the time interval t+ = 11.14 to 16.08 as afunction of the discretization N f , for A/R = 0.2 and ω2 R/g = 1
few 2D horizontal cylinders with different cross-sections,including elliptical cylinders and bow stern sections, andcompared experimental results to the weakly non-linear solu-tion of Lee (1968). Based on these results, in a followingsection, we will assess the accuracy of the present FNPFmodel in computing actual measured forces. Consistent withearlier results presented here, we restrict ourselves to a semi-circular floating cylinder oscillating with a large amplitudemotion A/R = 0.2.
As before, we assess the model convergence in this morestrongly non-linear case by comparing values computed fora coarser discretization to those for the finest discretizationwith N f = 80. Besides the convergence of the total hydro-dynamic force for a sufficiently fine mesh, it is also expectedthat each coefficient of the Fourier series of the signal shouldconverge to the approximate value predicted by weakly non-linear theories. Denoting by cn the Fourier coefficient of ordern and using the notations of Yamashita (1977), the Fourierdecomposition of the vertical component of the total hydro-dynamic force F3(t) reads:
F3(t) = c0 − 2∑k≥1
|ck | sin(k ω t + δk) (27)
where δk is the phase associated with the k-th component.The rate of convergence of the force for large amplitude
motion is seen in Fig. 4 to be 1.843 with an absorbing beachand 1.563 without beach. As already discussed above forsmall amplitude motion, it is seen in Fig. 4 that, withoutabsorbing beaches, the errors are much larger; this resultsfrom the large energy trapping in the wavetank that yieldsincreasingly non-linear and under-resolved waves. Regard-ing the Fourier coefficients of the force F3(t), Table 3 lists cn
values computed up to third-order for various discretizations,using Eq. (27), for t/T = 5 and 10. As before, convergenceis nearly achieved for N f = 60, except for the third-orderforce coefficient, which is associated with strongly non-lineareffects.
3.4 Convergence of results for internal points
In this section, for the same application to the forced heavingmotion of a semi-circular cylinder of radius R in deep water,
123

66 J. Ocean Eng. Mar. Energy (2015) 1:55–76
Fig. 5 Forced heaving motionof a semi-circular cylinder ofradius R in deep water:instantaneous L2 error normover time t ∈ [0, 10T ], in thecomputation of internal fields φ,φt and p, as a function of thediscretization N f = 20 (red), 40(green) and 60 (blue), withamplitude A/R, as compared tothe reference values computedwith the finest discretization,N f = 80 -9
-8
-7
-6
-5
-4
-3
-2
log 1
0ε n
(t),A
=0.
01R
t+
φ
-9
-8
-7
-6
-5
-4
-3
t+
φt
-9-8-7-6-5-4-3-2-10
log 1
0ε n
(t),A
=0.
2R
t+
-9
-8
-7
-6
-5
-4
-3
-2
0 5 10 0 5 10
0 5 10 0 5 10t+
we assess the instantaneous and global L2 convergence ofvarious model results computed at internal points (i.e., withinthe fluid domain), when refining the discretization (N f ). Wewill solve both small and large amplitude motion cases, withA/R = 0.01 and 0.2, respectively, using the same fixed timestep t = 0.005 s.
The internal points under consideration are located in sucha way that they remain inside the domain during the wholesimulation, to avoid an ambiguous comparison for elementslocated at the free surface. In the model, the solution at inter-nal points satisfies the same BIE as for boundary points,except that c(x, t) = 1, and the boundary fields φ and φt (andtheir normal derivative) are assumed to be known at time ti .Hence the computation of the solution at internal points isexplicit. Thus, assuming a pre-defined grid of internal pointsof coordinates xgages within the domain, the velocity potentialat internal points is given by (i = 1, . . . , Ngages):
φ(xgages, ti ) =∫
∂� f (ti )
[φn(yk, ti )G(xgages, yk)
−φ(yk, ti )∂G
∂n(xgages, yk)
]dSy (28)
on the discretized geometry � f (ti ) at time ti . Other variables,such as the internal velocity can also be explicitly obtained byapplying the gradient operator to the Green’s function withinthe integral kernel, from which the pressure can be computedusing Bernoulli equation.
Here, to simplify and reduce the post-processing steps, asimple internal grid is considered. Assuming a first geometryof the wavetank with, Lx = 62.3 m and d = 6.3 m, “numer-ical” gages are specified at a series of discrete x-locations,xi = 1 to x f = 60 m, with an uniform step xgages = 3 mand, in the vertical direction, from yi = −2 to y f = −6 m, bysteps ygages = 1 m. For this particular case, Ngages = 100.As indicated, besides φ and φt , which reflect the accuracyof the BEM solution, we will also assess the convergence ofthe variable p, which is numerically derived from the BEMsolution, by way of the time derivative of the BIE (28) and itsspatial gradient, which provide φt and the velocity, respec-tively. In this manner, the accuracy of the time stepping isalso verified.
We compute φ, φt and p at internal points, for three bound-ary discretizations with N f = 20, 40 and 60, and calculatethe instantaneous L2 error norm for each of these variables,compared to the results obtained with the finest discretiza-tion (N f = 80). Results for both amplitudes of motion aredisplayed in Fig. 5. When these errors are time averaged forNiter time steps, as (e.g., for the potential φ):
εN f =1
Niter
Niter∑i=1
√√√√√ 1
Ngages
Ngages∑k=1
(φN f (xk, ti )− φref (xk, ti ))2
maxxk φre f2
(29)
it is possible to evaluate a global L2 error norm associatedwith a given simulation. Note, the square root in Eq. (29)
123

J. Ocean Eng. Mar. Energy (2015) 1:55–76 67
Fig. 6 Forced heaving motionof a semi-circular cylinder ofradius R in deep water: samecase as Fig. 5, global L2 errornorm for φ, φt and p, obtainedby averaging instantaneouserrors for t = 0 to 10T . Thecoefficients m and c aredetermined by computing a leastmean square trend line ofequation y = mx + c for eachset of points
−5
−4
−3
−2
−1
0
−1.8 −1.5 −1.2 −0.9
log 1
0ε n
log101
Nf= log10
Δxλ
A/R = 0.01
−5
−4
−3
−2
−1
0
−1.8 −1.5 −1.2 −0.9
log101
Nf= log10
Δxλ
A/R = 0.2
φ
φt
φt + v2
2m=1.839 ; c=0.525m=1.838 ; c=0.406m=1.838 ; c=0.406
φ
φt
φt + v2
2m=1.851 ; c=1.416m=1.883 ; c=0.716m=1.884 ; c=0.714
represents εN f (t). These global convergence indicators arerepresented in Fig. 6, from which it is apparent that the orderof the spatial convergence, for a fixed time step, is not con-stant over the set of tested discretizations (i.e., not a constantpower of N f ). Nevertheless, if we compute the root meansquare line for the set (log 1
N f, log εN f ), it is seen that the
order of convergence of these simulations is close to 1.83 forthe small amplitude A/R = 0.01 and close to 1.88 for thelarger amplitude A/R = 0.2. These computations were doneusing the second-order Taylor explicit time stepping.
3.5 Comparison to the experiments of Yamashita
We now propose to repeat the same numerical simulation fora set of discrete frequencies to get a comparison with theexperiment conducted by Yamashita (1977). Each simula-tion is carried out using the methodology presented beforefor the convergence study. The signal is analyzed on a tem-poral window included in the time interval t+ ∈ [5, 10].The computed coefficients are then made non-dimensionalas done by Yamashita by taking:
c2∗ = 2 c2
2ρgR2ε2
c3∗ = 2 c3
2ρgR2ε3 (30)
with ε = AR = 0.2. The added mass a33 and the damping
coefficient b33 are also calculated and made non-dimensional
by a∗33 = a33
ρπ R22
and b∗33 =b33
√Rg
ρπ R22
. On the upper part of
Fig. 7, the hydrodynamic coefficients previously definedare compared to the theoretical predictions of Tasai andKoterayama (1976) and to the experimental values measuredby Yamashita (1977). A rather good agreement is observedfor these two quantities at least in the middle range of fre-
quencies. For low frequency, the experimental results and thetheory of Tasai are not in agreement, which can be explainedby the inviscid assumption of the model. The damping coef-ficient measure appears to be the most affected by viscouseffects, which seems reasonable. The high-order force coeffi-cients c2 and c3 are presented on the lower panels of Fig. 7. Anexcellent agreement with the low-order theory of Lee (1968)is observed for c2 in the low to middle frequency range. Forω2
g R ≥ 1, the value of c2 computed by the present FNPFmodel becomes greater than the prediction of the weakly non-linear theory. For the third-order coefficient c3, it appears thatour calculations underpredict the results from the low-ordertheory. By contrast, we observe a slightly better agreementof our results with the experimental values at low and highfrequencies. This could result from an insufficient mesh res-olution for computing high-order harmonics as it is seen inTable 3 that the third-order Fourier coefficient does not reacha clear limit even for the very fine discretization with 80 nodesper wavelength. Moreover, it is also seen in Table 3, that thedimensional coefficient c3 has a very small absolute value,which makes it more difficult to converge on c3 than on c1
for given values of the numerical parameters. The satisfac-tory agreement for first-order and second-order quantitiesseems to suggest that, for the ratio A/R = 0.2, the approx-imate theories are valid, and confirm the convergence of thenon-linear model towards these theories.
4 Forced swaying motion of a rectangular floatingcylinder
Here, we verify the convergence of numerical results to thepredictions of linear theory for a rectangular barge in forcedswaying motion. Rather than performing another exhaustiveconvergence study for a single frequency, as we did for the
123

68 J. Ocean Eng. Mar. Energy (2015) 1:55–76
Fig. 7 Forced heaving motionof a semi-circular cylinder ofradius R = B/2 in deep water:first- to third-order Fouriernon-dimensional coefficients ofthe hydrodynamic force, for alarge motion amplitudeA/R = 0.2. Results arecomputed over the time intervalt+ ∈ [5, 10] as a function of theexcitation frequency ω2 B/(2g):FNPF computations (redcircles); experiments ofYamashita (1977) (bluesquares); Tasai and Koterayama(1976) and Lee (1968) theories(green lines)
00.20.40.60.8
11.21.4
00.20.40.60.8
11.21.4
00.20.40.60.8
11.21.4
00.20.40.60.8
11.21.4
0.5 1.0 1.5
a∗ 33
ω2
gR
0.5 1.0 1.5ω2
gR
0.5 1.0 1.5ω2
gR
0.5 1.0 1.5ω2
gR
b∗ 33
c∗ 2 c∗ 3
present FNPF modelTasai
exp
present FNPF modelTasai
exp
present FNPF modelLeeexp
present FNPF modelLeeexp
semi-circular cylinder, we focus instead on the accuracy ofthe force calculation over a wide range of frequencies, aswe did in Sect. 3.5. Again, the discretization is specified tobe uniform over the computational domain boundary. Thediscretization over the body surface is thus adjusted to be thesame as on the free surface. A discretization based on N f =80 nodes per wavelength is used in all cases, which has beenshown in earlier applications to ensure a good convergenceof numerical results. The barge draft is set to a = 1 m andits width to B = 2a = 2 m. The amplitude A of the swayingmotion is set to a small value corresponding to A
a = 0.01,which will make the comparison with linear theory relevant.The force hydrodynamic coefficients are calculated over theinterval t+ = t/T ∈ [5.84, 10.84] (see in Fig. 8).
The hydrodynamic coefficients in sway a22 and b22 as wellas the cross-coupling coefficients between sway (translationalong the Ox axis) and pitch (rotation around the Oy axis)a24 and b24 are defined so as to verify:
F2(t) = −a22(ω)xG2(t)− b22(ω)xG2(t)
F4(t) = −a24(ω)xG2(t)− b24(ω)xG2(t) (31)
where F2 is the horizontal component of the force along theOx axis and F4 is the transverse moment in the y direction.
Figure 9 shows the added mass a22 and damping b22
hydrodynamic coefficients in sway, as well as those corre-sponding to the cross-coupling between sway and pitch, a24
and b24 (a24 is the added inertia in pitch due to the forcedmotion in sway), computed as a function of angular fre-quency. In the figure, our results are compared to Vugts’experiments and computations based on linear theory. Thenumerical results of Vugts have been digitized from figures
−0.02
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
0.02
0 2 4 6 8 10
F2
(N.m
−1)
t+
Fig. 8 Sway motion of a rectangular barge: horizontal force at fre-quency ω = 0.84 s−1 represented on the time interval t+ = t/T ∈[0, 10.84]
in the paper of Andersen and Wuzhou (1985). Vugts exper-imental results have been digitized thanks to the curves pre-sented in the review of Wehausen (1971). The parametersused to make the coefficients non-dimensional are selectedas in Andersen and Wuzhou (1985) (see definitions in thefigure). The angular frequency is made non-dimensional asω∗ = ω
√a/g.
We observe a fairly good agreement of our results withlinear theory over the whole frequency range, both for thecomponents of the force, both in and transverse to the bargedirection of oscillation. This calculation confirms the abilityof the model to accurately compute very fine scale phenom-
123

J. Ocean Eng. Mar. Energy (2015) 1:55–76 69
Fig. 9 Rectangular barge ofwidth B and draft a in swayingmotion: added mass anddamping coefficients as afunction of the non-dimensionalangular frequency. Comparisonbetween numerical wave tank(red circles), to both lineartheory (green line) andexperimental (blue squares)results of Vugts (1968)
0
0.5
1
1.5
2
2.5
0.5 1.0 1.5
a∗ 22
ω∗
0.5 1.0 1.5
ω∗
0.5 1.0 1.5ω∗
0.5 1.0 1.5ω∗
00.20.40.60.8
11.21.41.6
b∗ 22
00.050.1
0.150.2
0.250.3
0.350.4
a∗ 24
0
0.05
0.1
0.15
0.2
0.25
0.3
b∗ 24
present FNPF modelVugts
exp
present FNPF modelVugts
exp
present FNPF modelVugts
present FNPF modelVugts
ena, such as the cross-coupling components of the hydro-dynamic force. However, we note that these nearly linearcalculations (as well as results from the linear theory) donot match all of Vugts’ experimental data. In particular, weobserve that linear results overestimate the added mass a22
at low frequency, for ω∗ ≤ 0.3, and underpredict it at highfrequencies, for ω∗ ≥ 1.2. In between, the agreement withexperiments is quite good. This discrepancy is even moresignificant for the damping coefficient b22, which is underes-timated by linear theory mainly for higher frequencies. Thediscrepancy with the experimental values at low frequen-cies may be explained by the fact that, for long waves withrespect to the body size, viscous effects become graduallymore important (Fig. 9).
5 Freely floating circular cylinder
Having confirmed in earlier applications the accuracy andconvergence of this 2D-FNPF model for forced heaving orswaying motions of various horizontal cylinders, we nowassess the accuracy of the proposed wave-structure cou-pling algorithm, for the free oscillations of a floating cir-cular cylinder released from a non-equilibrium position. Inthe linear limit, Maskell and Ursell (1970) derived a semi-analytical solution of the vertical displacement of the cen-ter of mass, xG3(t) for: (i) a zero initial velocity condition(xG3(0) �= 0, xG3(0) = 0); or (ii) a zero displacement initialcondition (xG3(0) = 0, xG3(0) �= 0).
Below, we first detail the geometry of the computationaldomain and its discretization. Then, we check the conver-gence with respect to the discretization of results computedat internal points. Finally, we study in detail the cylinderoscillations as a function of time, for two different numerical
Table 4 Freely floating circular cylinder case: discretizations used inthe convergence study for internal points computations. Number ofnodes: on the free surface (NF ); on the cylinder (Nc); and total (Ndof )
Mesh 1 Mesh 2 Mesh 3 Mesh 4 Mesh 5
x (m) 0.131 0.098 0.049 0.033 0.024
NF 150 200 250 300 400
Nc 25 25 25 25 25
Ndof 364 476 926 1,376 1,826
schemes, and assess the overall accuracy of computations bychecking conservation of mass and total energy (body plusfluid), and the sensitivity of errors on mass and energy con-servation to the spatial discretization.
5.1 Computational domain and discretization
We consider a 2D rectangular domain of length Lx = 20 mand depth d = 5 m, and study the free oscillations of a semi-circular cylinder of radius R = 0.25 m, which is releasedfrom a non-equilibrium position xG3(0) �= 0 (R/3, R/4 andR/8). Time is made non-dimensional as, τ = t
√g/R and
the cylinder motion evolution in terms of xG3(t) is studiedfor τ ∈ [0, 20]. Parameters for the 5 initial discretizationsused in the convergence study are given in Table 4. In eachcase, the solution is computed at internal points verticallyspaced y = 1 m, specified along Ngages = 153 verticalnumerical gages distributed over the fluid domain, horizon-tally spaced x = 0.5 m. Over these points, a L2 errornorm is computed for the result difference with respect tothe finest (fifth) mesh, which has NF = 400 nodes on thefree surface.
123

70 J. Ocean Eng. Mar. Energy (2015) 1:55–76
Fig. 10 Freely floating cylinderof radius R: convergence ofresults at internal points (5meshes; Table 4), expressed bythe L2 error norm of thesolution for the 4 coarser gridsas compared to that in the fifthfinest grid. The cylinder centerof mass is initially set to xG3(0).These results were obtainedwith the second-order explicitTaylor time stepping
−6
−5
−4
−3
−2
−1
−1.5 −1.2 −0.9
log 1
0ε n
log101
Nf= log10 Δx
xG3(0) = 18R
−6
−5
−4
−3
−2
−1
−1.5 −1.2 −0.9
log101
Nf= log10 Δx
xG3(0) = 14R
φ
φt
φt + v2
2m=1.866 ; c=-0.899m=1.565 ; c=-0.231m=1.565 ; c=-0.231
φ
φt
φt + v2
2m=1.996 ; c=-0.711m=1.575 ; c=-0.207m=1.575 ; c=-0.206
5.2 Convergence of results at internal points
The L2 error norm of the variables φ, φt and p relativeto results in the finest grid is displayed in Fig. 10. For thefirst initial displacement xG3(0) = R/8, we also tested theaforementioned direct scheme, which consists in replacingdirectly in Eq. (5) the velocity and the acceleration of therigid body given by the Newmark scheme. This is some-what similar to the Iterative “Semi Implicit Time IntegrationMethod for Floating Bodies (ISITIMFB)” recently presentedin Yan and Ma (2007). Unless otherwise stated, this schemewill be referred to as the direct method. For this scheme, therelaxation parameter in the correction step of the Newmarkscheme was set to ω = 0.7 as this was observed to minimizethe number of sub-iterations required to achieve convergenceof the hydrodynamic force. Note that this relaxation parame-ter is set to ω = 1 for the implicit method. Additionally, theother parameters of the Newmark scheme are set in each caseto γ = 0.5 and β = 0.25.
In Fig. 10, the L2 error norms related to the variables φ,φt and p are represented for different discretizations. Notethat the L2 error of φt and p is superimposed. The root meansquare straight lines are computed for each set of points. It canbe observed that the order of convergence and the accuracyon the calculation of the variable φ are better than that for φt
and φt + 12v2. The rate of convergence is approximately 1.87
for φ while it reaches the value 1.56 for the other variables.For the amplitude xG3(0) = R/4, the rate of convergenceis slightly greater than for the amplitude xG3(0) = R/8.This time, we observe that the level of the accuracy on thevariable φt is worse than the one on φ. This effect could bedue to the sub-iterations used for the convergence of the forcecalculation. It is worth noting, as in the case of forced motion,
−1−0.8−0.6−0.4−0.2
00.20.40.60.8
1
0 5 10 15 20
xG
3(τ
)x
G3(0
)
τ
Implicit, Taylor 2nd orderImplicit, symplectic-like 1st order
Direct, Taylor 2nd orderDirect, symplectic-like 1st order
MaskellIto R/3
Fig. 11 Freely floating cylinder of radius R in deep water: time evolu-tion of the elevation of the cylinder, initially located at xG3(0) = R/8,as a function of numerical scheme compared to reference values in lin-ear theory for a small initial displacement of the structure with Nc = 50nodes on the body surface. The green dotted line and the red line arequasi-superimposed. The blue dotted line and the pink dotted line arequasi-superimposed
that the rate of convergence is slightly better for large motionthan for small motion amplitude.
5.3 Time evolution of the cylinder elevation as a function ofnumerical scheme
In Fig. 11, we compare the computed time evolution ofthe cylinder elevation, for xG3(0) = R/8, using the directmethod or the implicit one, to the semi-analytical methodof Maskell and Ursell (1970); and (ii) to the experimentalvalues of Ito (1977). The experiments of Ito were performedwith various initial displacements: 1 in, 1.5 in and 2 in andfor a diameter of the cylinder equal to 2R = 6 in (in the foot-
123

J. Ocean Eng. Mar. Energy (2015) 1:55–76 71
Implicit, Taylor 2nd orderImplicit, symplectic-like 1st order
Ito R/3Navier Stokes, Ghasemi et al. (2014) R/3
0 5 10 15 20τ
−0.8
−0.6
−0.4
−0.2
0
0.20.4
0.6
0.81
xG
3(τ
)x
G3(0
)
Fig. 12 Freely floating cylinder of radius R in deep water: time evolu-tion of the elevation of the cylinder, initially located at xG3(0) = R/3, asa function of numerical scheme compared to reference values in lineartheory for a strong initial displacement of the structure with Nc = 50nodes on the body surface
pound system). It was found that the first two amplitudes gavealmost the same free decay curve (which is the one displayedin Fig. 11). Results were computed for the finest mesh (5)with NF = 400. In Fig. 12, the computed time evolution ofthe cylinder elevation, for xG3(0) = R/3 is represented andcompared to the Navier–Stokes computations of Ghasemi etal. (2014).
It can be concluded that results obtained using the implicitmethod are in much better agreement with the referencesolutions than results using the direct method for the small-est amplitude xG3(0) = R/8. Moreover, we note that theagreement with the linear predictions of Maskell and Ursellappears to be satisfactory only for the smallest amplitudexG3(0) = R/8. For the other amplitude R/3, the verticaldisplacement predicted by the present method significantlydeviates from the prediction of linear theory after the firstminimum of the displacement for τ ≈ 4.0. In Fig. 12, it isseen that the model of Ghasemi et al. (2014) based on a two-fluid flow Navier–Stokes method gives a better predictionof the vertical displacement compared to experimental workof Ito (1977). This unfortunate behavior of the present FNPFmodel could be explained by the absence of viscous effects.
In terms of computational efficiency, running the implicitmethod with the discretization NF = 400 requires a constantnumber of 3 sub-iteration in the Newmark scheme, while thedirect method requires 5–6 sub-iterations to achieve conver-gence. Based on these tests, the direct method strategy doesnot appear as a viable alternative to the implicit method. Wewill thus use the implicit method in our 3D model.
5.4 Verification of mass and energy conservation
For the earlier results, we also computed the time evolution oftotal energy of the fluid-body system and total fluid volume.The total energy of the fluid-body system can be split into thefluid energy E f (t), consisting of kinetic and potential energy,
and the body mechanical energy Eb(t). Energy conservationin these inviscid simulations imposes that total energy shouldbe constant at any time step. More precisely, in the model,the fluid energy is expressed as:
E f (t) = 1
2ρg
∫� f (t)
(z + d)2ds + 1
2ρ
∫� f (t)
φφnds (32)
and the solid body mechanical energy reads:
Eb(t) = mg(xG3 + d)+ 1
2xT
GMxG (33)
where m (kg m−1) is the body mass per unit length and theinertia matrix M is diagonal with, M11 = M33 = m andM22 = IG , where IG denotes the moment of inertia aroundthe y axis passing through the body center of mass. Theconservation of energy states that:
E f (t) = −Eb(t) (34)
We also know that the variation of the mechanical energyof the solid is equal to the work done by the force actingon it, that is Eb(t) = W = ∫ t
0 F · xGdt . Conservationof total energy is checked in the model by computing therelative error, (E f (t)+Eb(t))/Eb(0) as a function of time,with the initial fluid energy being referred to zero and thedenominator being the initial mechanical energy given thesolid body by its initial vertical displacement; this is donein the top panels of Fig. 13, for two different discretizationsand two initial amplitudes. In the middle panels of the figure,we computed (Eb − W )/Eb(0), which enables to checkthe second conservation principle. Finally the bottom panelsof the figure show the evolution of the relative error on fluidvolume conservation, (V (� f (t))− V0)/V0. The latter errorstays very small in all cases, although it increases with timeand is larger, the larger the initial cylinder displacement. Thisconfirms the accuracy of both Laplace equation solver andtime stepping schemes used in the present 2D-FNPF model.
It is worth noting that, for the two discretizations testedhere with NF = 100 and 400, the conservation of energyis satisfied within the same degree of accuracy. Note thatthe discretization of the body was kept constant for eachdiscretization of the free surface so that only the influenceof this latter parameter was studied. This shows that if weuse a fixed time step, refining the mesh at the free surfacedoes not improve the accuracy of the energy conservationwhen the discretization of the body is kept constant. Thisreflects the fact that numerical errors on energy conservationcan only decrease with grid refinement if the Courant numberis held constant. When using an adaptive time step and thesame discretizations as before, we obtain the results shownin Fig. 14. It is seen that the the accuracy on the volumeratio (V (� f (t))− V0)/V0 and on the energy ratio (Eb −W )/Eb(0) is significantly improved when changing both thespace and time discretizations according to a CFL condition,
123

72 J. Ocean Eng. Mar. Energy (2015) 1:55–76
Fig. 13 Freely floating cylinderof radius R: time behavior of 3energy and volume ratios for theminimal and maximaldiscretizations and for twoinitial release amplitudesxG3(0) = R/8 andxG3(0) = R/4 with the samefixed time step. These resultswere obtained with thesecond-order explicit Taylortime stepping
00.0020.0040.0060.0080.01
0.012NF = 100
00.0020.0040.0060.0080.01
0.012NF = 400
02e-054e-056e-058e-05
0.00010.000120.000140.00016
02e-054e-056e-058e-05
0.00010.000120.000140.00016
02e-064e-066e-068e-061e-05
1.2e-05
0 5 10 15 20 25 30τ
0 5 10 15 20 25 30τ
02e-064e-066e-068e-061e-05
1.2e-05
xG3(0) = R/8xG3(0) = R/4
xG3(0) = R/8xG3(0) = R/4
xG3(0) = R/8xG3(0) = R/4
xG3(0) = R/8xG3(0) = R/4
xG3(0) = R/8xG3(0) = R/4
xG3(0) = R/8xG3(0) = R/4
∣ ∣ ∣Δ
Ef+
ΔE
b
Eb(0
)
∣ ∣ ∣
∣ ∣ ∣Δ
Eb−
W
Eb(0
)
∣ ∣ ∣
∣ ∣ ∣V
(t)−
V0
V0
∣ ∣ ∣
Fig. 14 Freely floating cylinderof radius R: same case as Fig. 13with an adaptive time-stepprocedure. These results wereobtained with the second-orderexplicit Taylor time stepping
0
0.014
∣ ∣ ∣Δ
Ef+
ΔE
b
Eb(0
)
∣ ∣ ∣
NF = 100
0
0.002
0.004NF = 400
0
0.0002
∣ ∣ ∣Δ
Eb−
WE
b(0
)
∣ ∣ ∣
0
3e-05
6e-05
0
1.4e-05
∣ ∣ ∣V
(t)−
V0
V0
∣ ∣ ∣
0
1e-06
2e-06
3e-06
4e-06
xG3(0) = R/8xG3(0) = R/4
0 5 10 15 20 25 30τ
0 5 10 15 20 25 30τ
which was not the case using a fixed time step. However, itappears that the energy E f +Eb keeps increasing in absolutevalue after the end of the free decay with the second-orderTaylor explicit time stepping. This error is more importantfor large amplitude.
For this particular case, it has been found that using asymplectic-like first-order integrator as defined in Sect. 2.2.1leads to a much better conservation of the energy, as it canbe seen in Fig. 15 for the initial release of the cylinder atxG3(0) = R/4.
Moreover, we clearly see in Fig. 15 that the variationreaches a limit which is not the case for the explicit second-order Taylor series.
6 Response amplitude operators of a 2D rectangularbarge
Finally, we propose validating our model against the moredemanding test case of a 2D rectangular barge subjected to
123

J. Ocean Eng. Mar. Energy (2015) 1:55–76 73
Fig. 15 Freely floating cylinderof radius R: energy (left) andvolume (right) conservation forinitial amplitude R/4 with twonumerical schemes for the finestmesh of parameter NF = 400
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0.0035
0.004
0.0045
∣∣∣Δ(Ef +Eb)(t)
Eb(0)
∣∣∣
0
5e-07
1e-06
1.5e-06
2e-06
2.5e-06
3e-06
3.5e-06
4e-06
4.5e-06
∣∣∣ΔVf (t)Vf (0)
∣∣∣
symplectic-like order 1explicit order 2
symplectic-like order 1explicit order 2
0 5 10 15 20 25 30 35τ
0 5 10 15 20 25 30 35τ
Fig. 16 Rectangular barge inwaves of parameters H = 1 cmand H = 5 cm: first-orderresponse amplitude operator forsway motion xG1
A with respect tothe non-dimensional frequencyξ = ω2 B
2g
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
xG1
A
present FNPF model H = 1cmpresent FNPF model H = 5cm
exp. Nojiri and Murayama (1975)FNPF Koo and Kim (2004) H = 7cm
linear model Koo and Kim (2004)
0 0.5 1 1.5 2
ξ
Fig. 17 Rectangular barge inwaves of parameters H = 1 cmand H = 5 cm: first-orderresponse amplitude operator forheave motion xG3
A with respectto the non-dimensionalfrequency ξ = ω2 B
2g
present FNPF model H = 1cmpresent FNPF model H = 5cm
exp. Nojiri and Murayama (1975)FNPF Koo and Kim (2004) H = 7cm
linear model Koo and Kim (2004)
0
0.5
1
1.5
2
2.5
xG3
A
0 0.5 1 1.5 2
ξ
123

74 J. Ocean Eng. Mar. Energy (2015) 1:55–76
Fig. 18 Rectangular barge inwaves of parameters H = 1 cmand H = 5 cm: first-orderresponse amplitude operator forroll motion xG3
ω2g A
with respect to
the non-dimensional frequencyξ = ω2 B
2g
0
2
4
6
8
10
12
14
16
18
0 0.5 1 1.5 2
xG2
ω2 gA
ξ
present FNPF model H = 1cmpresent FNPF model H = 5cm
exp. Nojiri and Murayama (1975)FNPF Koo and Kim (2004) H = 7cm
linear model Koo and Kim (2004)
incident waves of various amplitudes. This test case has beenused, e.g., by Koo and Kim (2004). We model a 2D rectangu-lar barge with rounded off corners of radius r = 0.064 m, ofwidth B = 0.5 m and of initial draft T = 0.25 m. The bodymass is M = 125 kg and moment of inertia I = 4.05 kg m2.The motion in the x direction is constrained with a spring ofstiffness K = 197.58 N m−1 and a damping coefficient ofC = 19.8 N m−1 s−1. The keel to center of gravity distanceis KG = 0.135 m. We use a wave tank of length Lx = 10λ
for each considered wave. In the model, we specify as a left-ward boundary condition an incident linear Airy wave profileof normal particle velocity φn and local particle accelerationφtn and additionally use an active absorbing beach in front ofthe wave generation area. The discretization in results pre-sented below has N f = 60 nodes per dominant wavelength.We compute two set of frequencies for a small wave heightH = 1 cm and a moderate one H = 5 cm. Our results arecompared : (i) to the fully non-linear computations of Kooand Kim (2004) obtained with a similar FNPF model forH = 7 cm; (ii) to the experimental results of Nojiri andMurayama (1975) digitized from the paper of Koo and Kim(2004); and (iii) to the linear computations of Koo and Kim(2004). The first-order response amplitude operators for eachmode of motion are represented in Figs. 16, 17, 18. The com-parison between the small amplitude wave case and the linearcomputations of Koo and Kim (2004) is quite satisfactory. Itis interesting to note that the first-order response obtainedwith the wave height H = 5 cm significantly deviates fromthat obtained with H = 1 cm near the resonance frequencyrange.
Conclusions
We presented computations of the interactions of a float-ing body with a free surface flow modeled by the fully non-
linear potential flow (FNPF) theory. The present FNPF modelis implemented based on a higher-order boundary elementmethod (BEM). Although these results are being extended tothree dimensions, the present applications are only for two-dimensional cases. In this paper, we extended the implicitcoupling scheme of Guerber et al. (2012), which was limitedto submerged bodies, to surface-piercing rigid bodies. Sincethere are more reference solutions in the literature for thiscase, we first verified the accuracy and convergence of ourscheme, for the forced motion (heaving and swaying) of arigid body on the free surface. Moreover, we also demon-strated the advantage, in terms of energy and volume conser-vation, of using a time stepping inspired by the symplecticintegrators. In particular, besides global errors such as onmass and energy conservation, we assessed the accuracy ofthe computed hydrodynamic force applied to the body as aresult of its motion, which is key to accurately solving caseswith a freely floating body. In all cases, for small amplitudebody motion, we observed a very good agreement with resultsfrom the linear theory. In such cases, the conservation of totalfluid volume is achieved within a high degree of accuracy. Ingeneral, to assess the convergence of various model results,we computed a L2 error norm of results in various bound-ary discretizations, compared to those obtained in the finestdiscretization. This norm was computed at a set of internalpoints within the fluid domain, which are kept at a fixed posi-tion during the simulations. In all cases, convergence of theselected field variables, in terms of the L2 error norm, showsa good behavior both for forced and freely floating bodymotion. For large amplitude motion cases, the L2 error normof the variables has a similar behavior with respect to the dis-cretization, but the smallest errors achieved are larger than forsmall amplitude motion. We believe that, for such cases, thecurrent geometric updating of the free surface intersectionnodes with the body and the regridding of the free surfacediscretization that results, may not be sufficient for achieving
123

J. Ocean Eng. Mar. Energy (2015) 1:55–76 75
a high volume conservation. For freely floating bodies, theconvergence of the algorithm is studied for various ampli-tudes of motion in free decay tests. We find that the implicitmethod of van Daalen (1993) and Tanizawa (2000) gives asatisfactory agreement with the analytical results of Maskelland Ursell (1970). A larger discrepancy, however, is found forlarge amplitude free decay motions, which indicates the needfor developing a way to include viscous effects in the presentFNPF model. A preliminar investigation of the capability ofthe model to predict the free motion of a floating body inwaves is done and a fine agreement with other references isfound.
In future work, besides extending the present approach tothe 3D-FNPF model of Grilli et al. (2001), we will refine thetreatment of intersection points between the rigid body andthe free surface and study cases both in 2D and 3D when bodymotions are forced by waves generated in the model (bothregular and irregular). We also aim to generalize to higherorder, the present first-order symplectic-like integrator.
Acknowledgments This work was partly funded by the FrenchResearch Agency (CIFRE agreement # 2011-1724). Stephan Grilliacknowledges support for this work from Grant N000141310687 ofthe US Office of Naval Research.
References
Andersen P, Wuzhou H (1985) On the calculation of two-dimensionaladded mass and damping coefficients by simple Green’s functiontechnique. Ocean Eng 12(5):425–451
Bai W, Eatock Taylor R (2006) Higher-order boundary element sim-ulation of fully nonlinear wave radiation by oscillating verticalcylinders. Appl Ocean Res 28(4):247–265
Bai W, Eatock Taylor R (2009) Fully nonlinear simulation of waveinteraction with fixed and floating flared structures. Ocean Eng36(3):223–236
Berkvens P (1998) Floating bodies interacting with water waves: Devel-opment of a time-domain panel method, PhD thesis, UniversiteitTwente, The Netherlands
Bonnet M (1995) Equations intégrales et éléments de frontiere (inFrench), CNRS Editions/Eyrolles
Cointe R (1989) Quelques aspects de la simulation numérique dun canalà houle (284 pages in French), PhD thesis, Ecole Nationale desPonts et Chaussées, Paris, France
Dias F, Bridges T (2006) The numerical computation of freely prop-agating time-dependent irrotational water waves. Fluid Dyn Res38(12):803–830
Dommermuth D, Yue D (1987) Numerical simulations of nonlinearaxisymmetric flows with a free surface. J Fluid Mech 178:195–219
Frank W (1967) Oscillation of cylinders in or below the free surface ofdeep fluids. DTIC Document, Report 2375. Naval Ship Researchand Development Center, Hydromechanics Laboratory, Washing-ton, D.C., USA
Ghasemi A, Pathak A, Raessi M (2014) Computational simulation ofthe interactions between moving rigid bodies and incompressibletwo-fluid flows. Comput Fluids 94:1–13
Grilli S, Guyenne P, Dias F (2001) A fully non-linear model for three-dimensional overturning waves over an arbitrary bottom. Int JNumer Methods Fluids 35(7):829–867
Grilli S, Skourup J, Svendsen I (1989) An efficient boundary elementmethod for nonlinear water waves. Eng Anal Bound Elements6(2):97–107
Grilli S, Subramanya R (1993) A computer program for transient waverun-up. Research Report No. CACR-93-02. University of RhodeIsland, Kingston, RI, USA
Grilli S, Subramanya R (1996) Numerical modeling of wave breakinginduced by fixed or moving boundaries. Comput Mech 17(6):374–391
Grilli S, Svendsen I (1990) Corner problems and global accuracy inthe boundary element solution of nonlinear wave flows. Eng AnalBound Elements 7(4):178–195
Guerber E, Benoit M, Grilli S, Buvat C (2012) A fully nonlinear implicitmodel for wave interactions with submerged structures in forcedor free motion. Eng Anal Bound Elements 36(7):1151–1163
Hadžic I, Hennig J, Peric M, Xing-Kaeding Y (2005) Computationof flow-induced motion of floating bodies. Appl Math Model29(12):1196–1210
Ito S (1977) Study of the transient heave oscillation of a floating cylin-der, PhD thesis, Massachusetts Institute of Technology
Kane C (1999) Variational integrators and the Newmark algorithm forconservative and dissipative mechanical systems, PhD thesis, Cal-tech
Kent C (2005) A pseudo-spectral method for calculating wave-bodyinteraction using an explicit free-surface formulation, PhD thesis,University of Michigan
Koo W, Kim M (2004) Freely floating-body simulation by a 2D fullynonlinear numerical wave tank. Ocean Eng 31(16):2011–2046
Koo W, Kim M (2007) Fully nonlinear wave-body interactions withsurface-piercing bodies. Ocean Eng 34(7):1000–1012
Lee C (1968) The second-order theory of heaving cylinders in a freesurface. J Ship Res 12(4):313–327
Lew A, Marsden J, Ortiz M, West M (2004) Variational time integrators.Int J Numer Methods Eng 60(1):153–212
Li Y, Lin M (2012) Regular and irregular wave impacts on floating body.Ocean Eng 42:93–101
Liu Y, Xue M, Yue D (2001) Computations of fully nonlinear three-dimensional wave-wave and wave-body interactions, part 2: non-linear waves and forces on a body. J Fluid Mech 438:41–66
Ma Q, Yan S (2009) QALE-FEM for numerical modelling of non-linearinteraction between 3D moored floating bodies and steep waves.Int J Numer Methods Eng 78(6):713–756
Maskell S, Ursell F (1970) The transient motion of a floating body. JFluid Mech 44(2):303–313
Nojiri N, Murayama K (1975) A study on the drift force on two dimen-sional floating body in regular waves. Trans West Jpn Soc NavArch 51:131–152
Porter W (1960) Pressure distributions, added-mass, and damping coef-ficients for cylinders oscillating in a free surface. Technical report,DTIC Document
Rahman M, Mizutani N, Kawasaki K (2006) Numerical modeling ofdynamic responses and mooring forces of submerged floatingbreakwater. Coast Eng 53(10):799–815
Tang H, Huang C, Chen W (2011) Dynamics of dual pontoon float-ing structure for cage aquaculture in a two-dimensional numericalwave tank. J Fluids Struct 27(7):918–936
Tanizawa K (1995) A nonlinear simulation method of 3D body motionsin waves. J Soc Nav Arch Jpn 178:179–191
Tanizawa K (2000) The state of the art on numerical wave tank. In:Proceedings of 4th Osaka colloquium on seakeeping performanceof ships, pp 95–114
123

76 J. Ocean Eng. Mar. Energy (2015) 1:55–76
Tasai F, Koterayama W (1976) Nonlinear hydrodynamic forces actingon cylinders heaving on the surface of a fluid. Rep Res Inst ApplMech Kyushu Univ 24:1–39
van Daalen E (1993) Numerical and theoretical studies of water wavesand floating bodies, PhD thesis, Universiteit Twente, The Nether-lands
Vugts JH (1968) The hydrodynamic coefficients for swaying, heavingand rolling cylinders in a free surface. In: Report // NederlandsScheepsstudiecentrum TNO, vol 112. Netherlands Ship ResearchCentre TNO, Shipbuilding Department
Wang Q (2005) Unstructured MEL modelling of nonlinear unsteadyship waves. J Comput Phys 210(1):368–385
Wehausen J (1971) The motion of floating bodies. Annu Rev FluidMech 3(1):237–268
Yamashita S (1977) Calculations of the hydrodynamic forces actingupon thin cylinders oscillating vertically with large amplitude. JSoc Nav Arch 141:61–70
Yan S, Ma Q (2007) Numerical simulation of fully nonlinear interactionbetween steep waves and 2D floating bodies using the QALE-FEMmethod. J Comput Phys 221(2):666–692
Zhou B, Ning D, Teng B, Bai W (2013) Numerical investigation of waveradiation by a vertical cylinder using a fully nonlinear HOBEM.Ocean Eng 70:1–13
123
Recommended





![A High-Level Formalization of Floating-Point Numbers in PVSnumbers and numerical computation, see [13,15,18,24]. The correctness of floating-point computations is critical to engineering](https://img.pdfslide.us/doc/110x75/5f7007c89731896d5b01e183/a-high-level-formalization-of-floating-point-numbers-in-pvs-numbers-and-numerical.jpg)