Selection of industrial motorsStork Drives Seminar Malmö / Odense | April 2017
All rights reserved © Apr-17/ Dunkermotoren GmbH
Selection of industrial motors
Selection of linear solutions
Selection of integrated drives
Agenda
2
All rights reserved © Apr-17/ Dunkermotoren GmbH 3
(1) About Dunker

All rights reserved © Apr-17/ Dunkermotoren GmbH
About Dunker
4
Headquarter
Bonndorf/ Germany
Factories
Bonndorf/ Germany
Subotica/ Serbia
Taicang/ China
All rights reserved © Apr-17/ Dunkermotoren GmbH
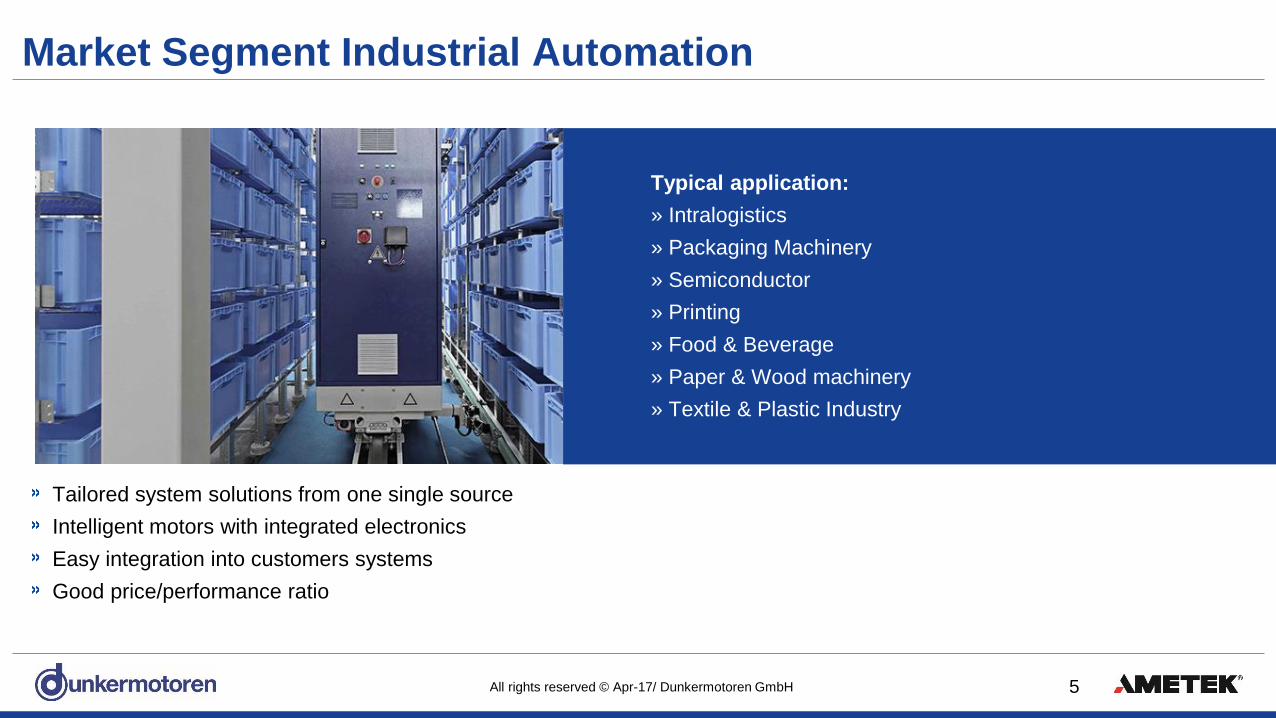
Market Segment Industrial Automation
5
Tailored system solutions from one single source
Intelligent motors with integrated electronics
Easy integration into customers systems
Good price/performance ratio
Typical application:
» Intralogistics
» Packaging Machinery
» Semiconductor
» Printing
» Food & Beverage
» Paper & Wood machinery
» Textile & Plastic Industry
All rights reserved © Apr-17/ Dunkermotoren GmbH 6
(2) Selection of industrial motors
All rights reserved © Apr-17/ Dunkermotoren GmbH
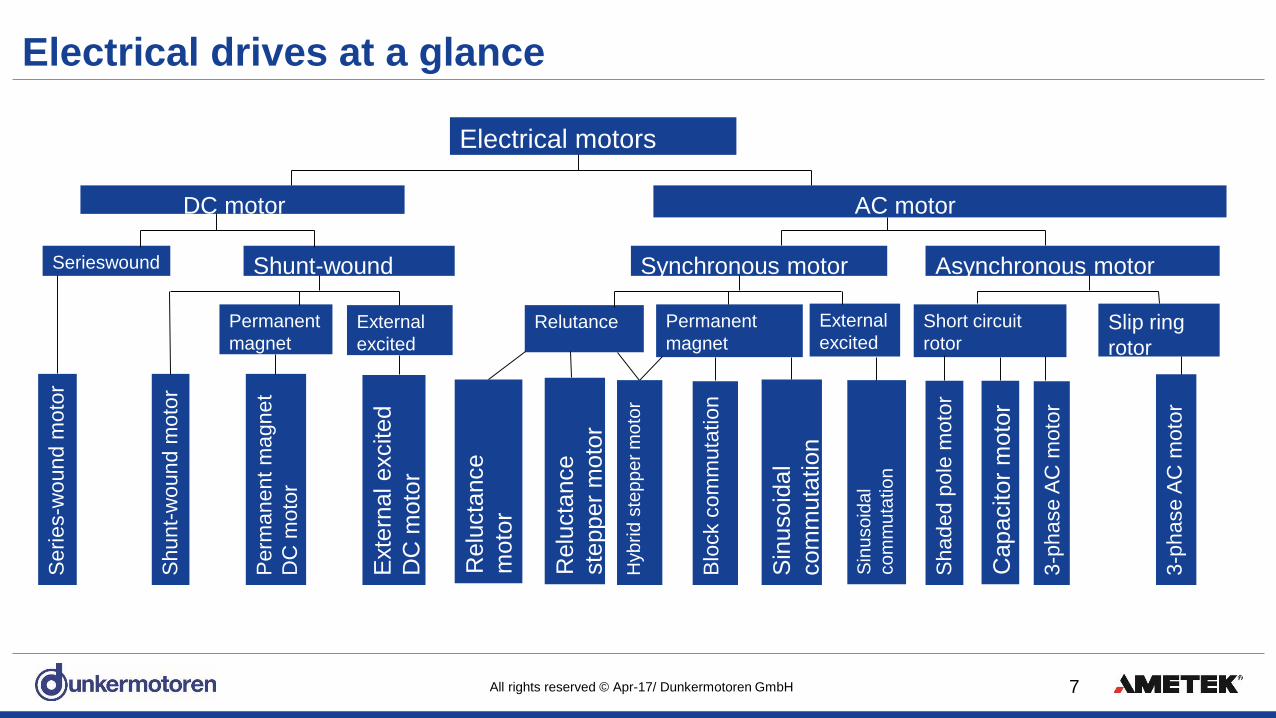
Electrical drives at a glance
7
Electrical motors
DC motor AC motor
Serieswound Shunt-wound Synchronous motor Asynchronous motor
Slip ring
rotor
Short circuit
rotor
External
excitedPermanent
magnetRelutance
Seri
es-w
ound
moto
r
External
excited
Permanent
magnet
Shun
t-w
ound
moto
r
Perm
ane
nt
magne
t
DC
moto
r
Exte
rnal excited
DC
moto
r
3-p
hase A
C m
oto
r
3-p
hase A
C m
oto
r
Capacitor
moto
r
Shad
ed p
ole
moto
r
Sin
uso
ida
l
co
mm
uta
tio
n
Sin
usoid
al
com
muta
tion
Blo
ck c
om
muta
tion
Hyb
rid
ste
pp
er
mo
tor
Relu
cta
nce
ste
pper
moto
r
Relu
cta
nce
mo
tor
All rights reserved © Apr-17/ Dunkermotoren GmbH
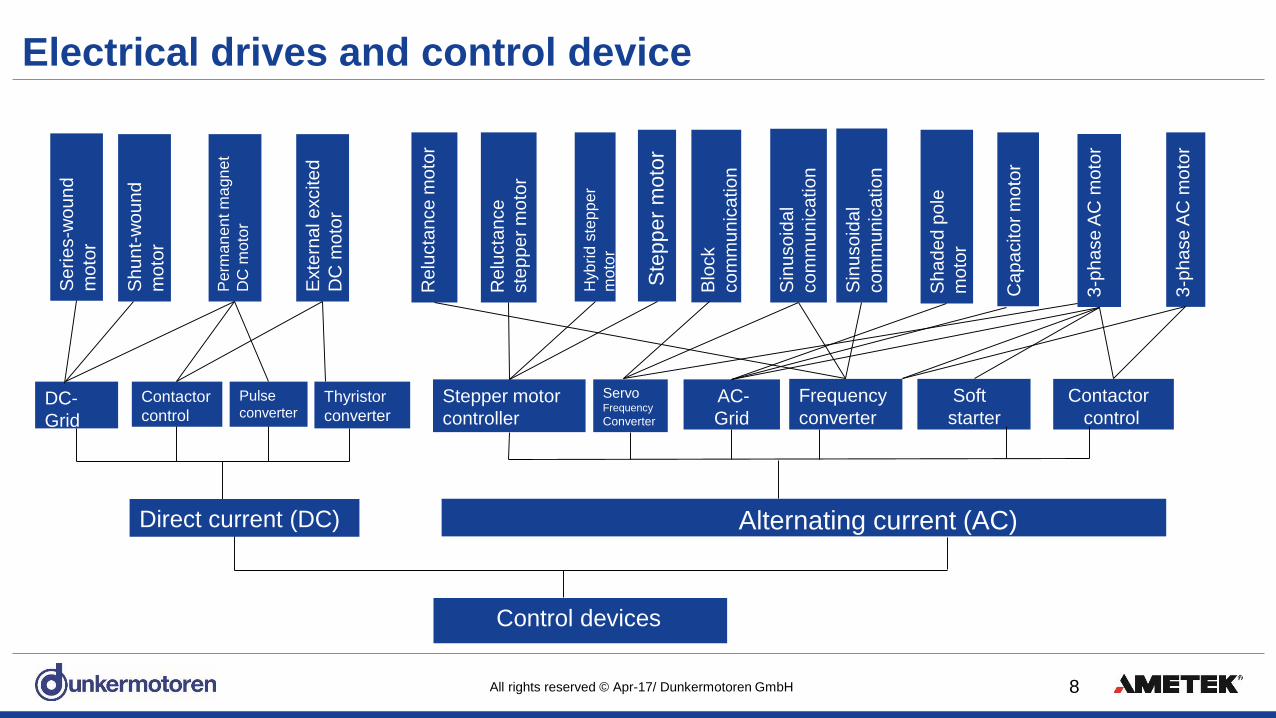
Electrical drives and control device
8
Series-w
ou
nd
mo
tor
Shunt-
wo
un
d
mo
tor
Pe
rma
nent m
agn
et
DC
mo
tor
DC-
Grid
Contactor
control
Exte
rna
l e
xcite
d
DC
mo
tor
Pulseconverter
Thyristor
converter
Direct current (DC)
Re
lucta
nce m
oto
r
Re
lucta
nce
ste
pp
er
mo
tor
Hyb
rid
ste
pp
er
mo
tor
Ste
pper
moto
r
Blo
ck
co
mm
un
ica
tio
n
Sin
uso
ida
l
co
mm
un
ica
tio
n
Sin
uso
ida
l
co
mm
un
ica
tio
n
Sh
ad
ed
po
le
mo
tor
Ca
pa
cito
r m
oto
r
3-p
ha
se
AC
mo
tor
3-p
ha
se
AC
mo
tor
Stepper motor
controller
ServoFrequency
Converter
AC-
Grid
Frequency
converter
Soft
starter
Contactor
control
Alternating current (AC)
Control devices
All rights reserved © Apr-17/ Dunkermotoren GmbH
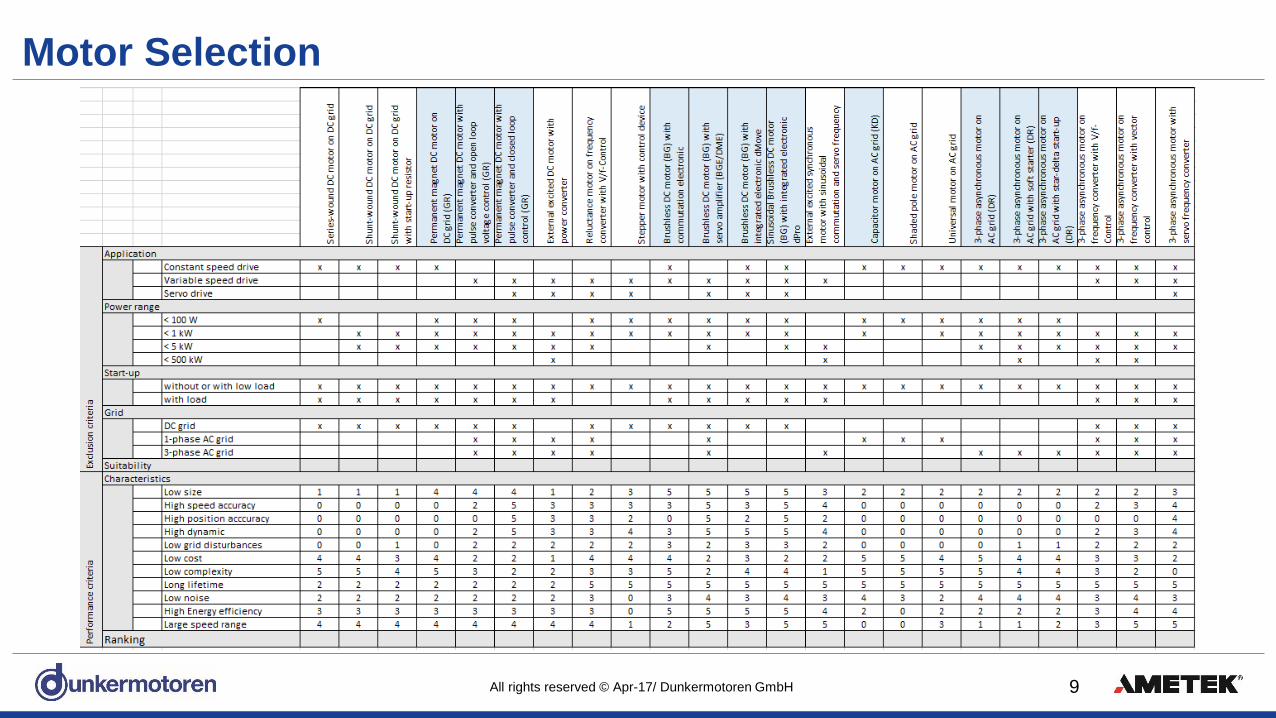
Motor Selection
9
All rights reserved © Apr-17/ Dunkermotoren GmbH
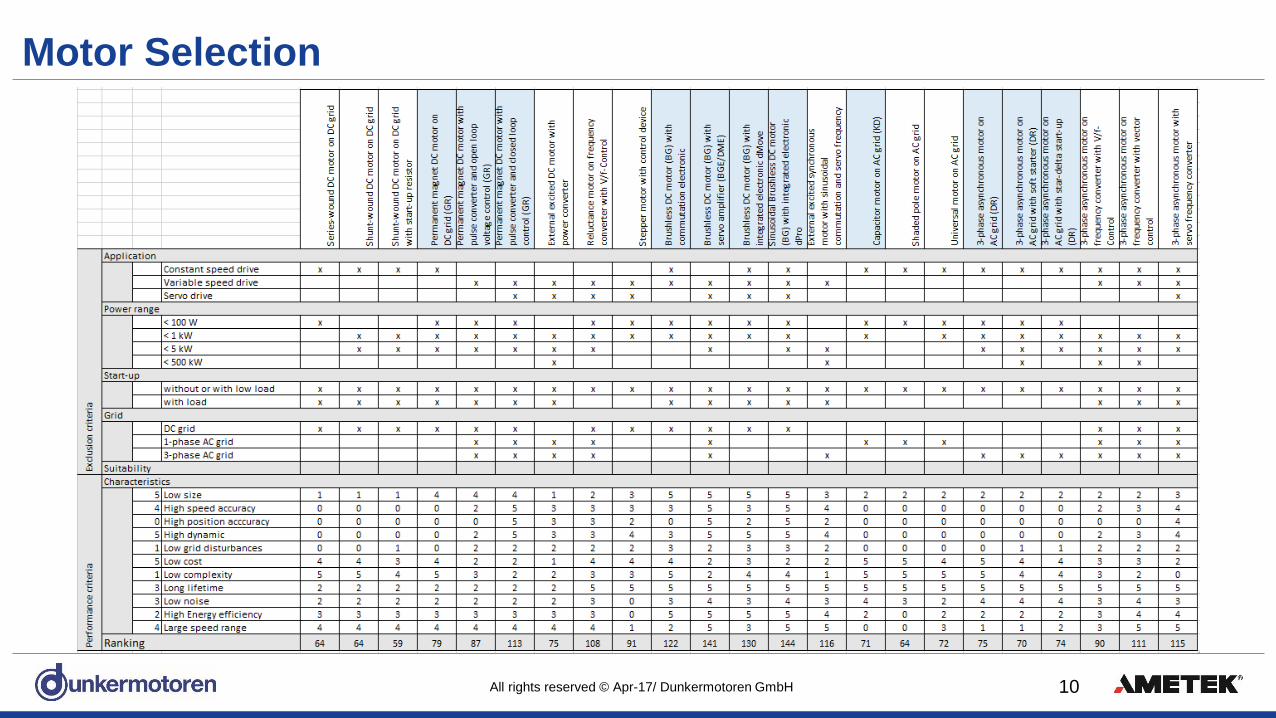
Motor Selection
10
All rights reserved © Apr-17/ Dunkermotoren GmbH
» Which operating mode is used (continuous operation = S1 or intermittent operation = S5)?
» What is the expected working life of the motor?
» How much space is available for the motor?
» Are there special environmental conditions (temperature, humidity, vibration, ...)?
» To what degree can heat be conducted away from the motor?
» Are there exceptional axial and radial shaft loads to be considered?
» What are the requirements for the motor control electronics?
» Is the motor to be controlled online via a bus system?
» Do you need a brake or an encoder?
» Are there any safety requirements?
…
Further factors to be considered
11

All rights reserved © Apr-17/ Dunkermotoren GmbH
Brushless vs. brushed DC motors
12
Brushless DC motors
Highest power density
Excellent dynamic performance
Extreme overload capability
Very long lifetime
Maintenance free
Brushed DC motors
High power density
High efficiency
Smooth motion & Low cogging
Robust design
Easy implementation
All rights reserved © Apr-17/ Dunkermotoren GmbH
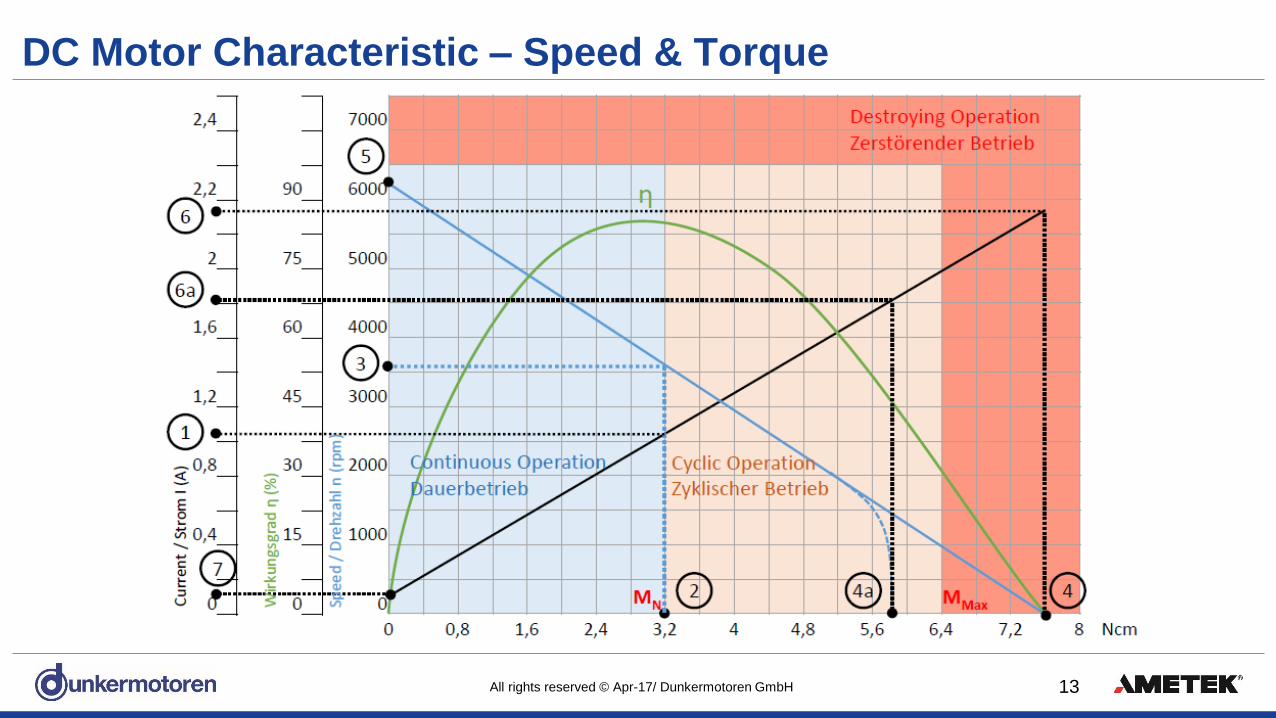
DC Motor Characteristic – Speed & Torque
13
All rights reserved © Apr-17/ Dunkermotoren GmbH
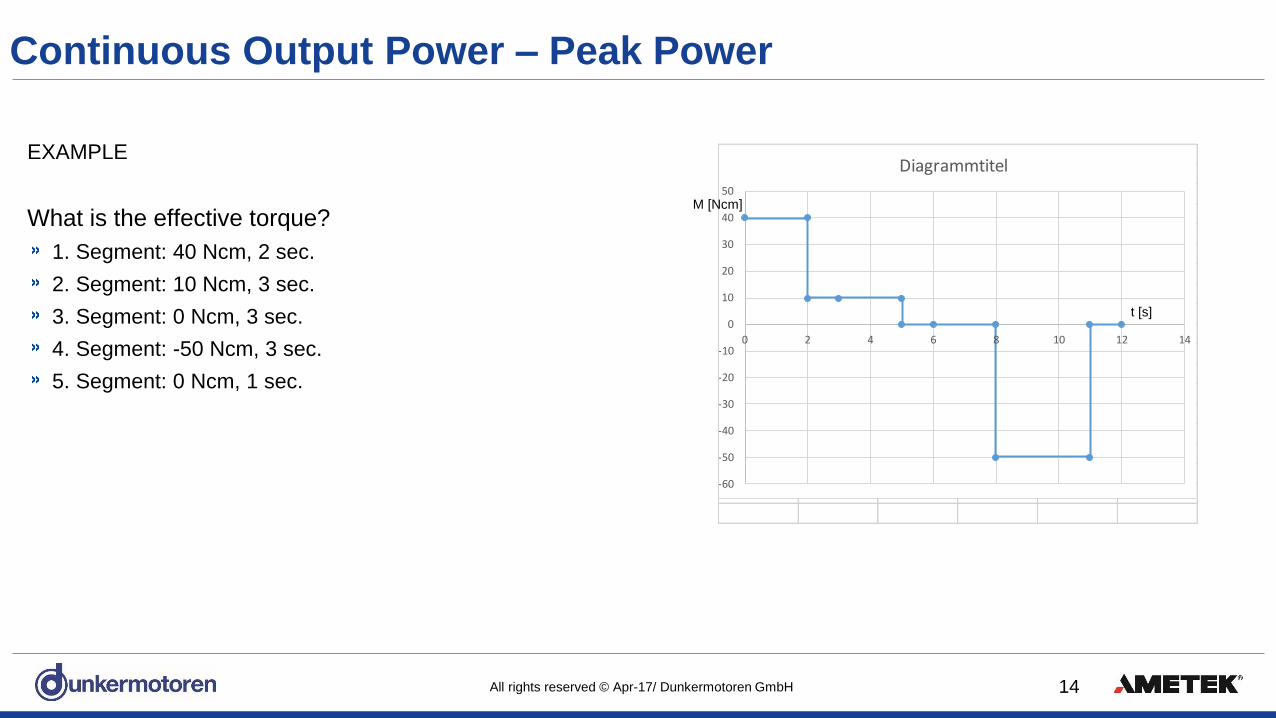
EXAMPLE
What is the effective torque?
1. Segment: 40 Ncm, 2 sec.
2. Segment: 10 Ncm, 3 sec.
3. Segment: 0 Ncm, 3 sec.
4. Segment: -50 Ncm, 3 sec.
5. Segment: 0 Ncm, 1 sec.
Continuous Output Power – Peak Power
14
-60
-50
-40
-30
-20
-10
0
10
20
30
40
50
0 2 4 6 8 10 12 14
Diagrammtitel
M [Ncm]
t [s]
All rights reserved © Apr-17/ Dunkermotoren GmbH
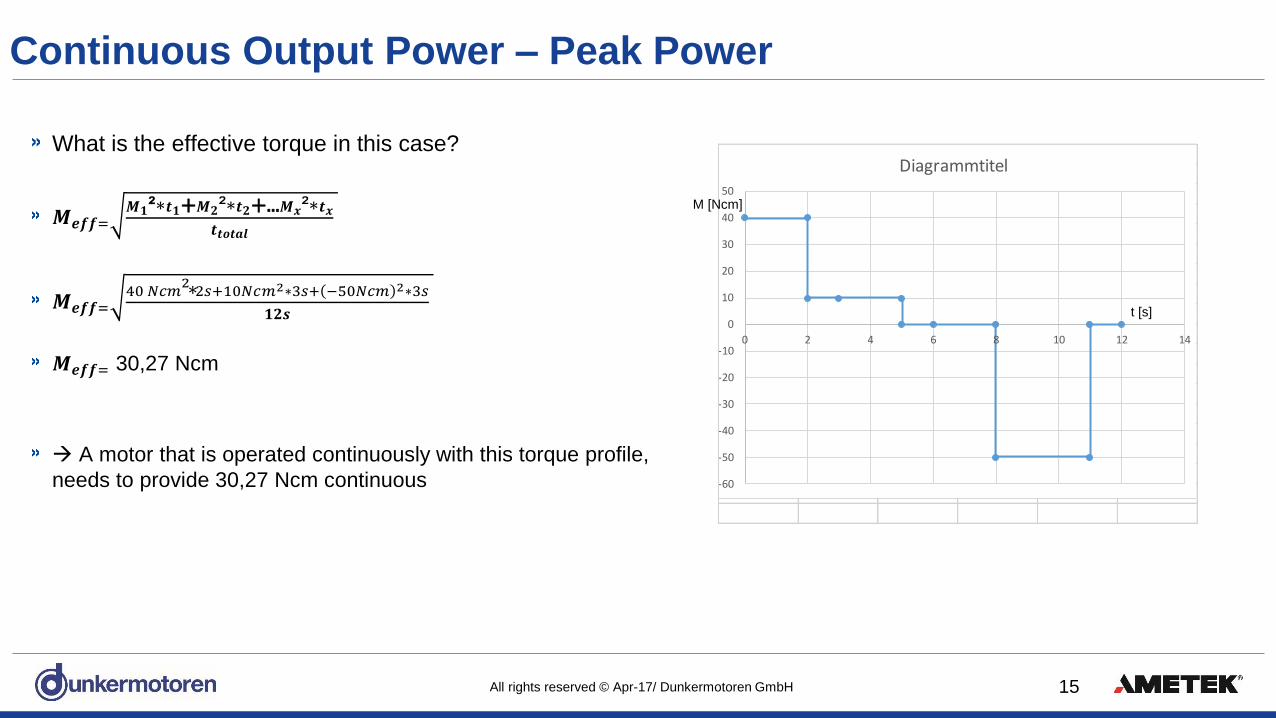
What is the effective torque in this case?
𝑴𝒆𝒇𝒇=𝑴𝟏²∗𝒕𝟏+𝑴𝟐²∗𝒕𝟐+...𝑴𝒙²∗𝒕𝒙
𝒕𝒕𝒐𝒕𝒂𝒍
𝑴𝒆𝒇𝒇=40 𝑁𝑐𝑚²∗2𝑠+10𝑁𝑐𝑚2∗3𝑠+ −50𝑁𝑐𝑚 2∗3𝑠
𝟏𝟐𝒔
𝑴𝒆𝒇𝒇= 30,27 Ncm
A motor that is operated continuously with this torque profile,
needs to provide 30,27 Ncm continuous
Continuous Output Power – Peak Power
15
-60
-50
-40
-30
-20
-10
0
10
20
30
40
50
0 2 4 6 8 10 12 14
Diagrammtitel
M [Ncm]
t [s]

All rights reserved © Apr-17/ Dunkermotoren GmbH
Accessoires
16
MotorsIntegrated Controller GearboxesBrakesEncoders
All rights reserved © Apr-17/ Dunkermotoren GmbH
Selection of Gears
17
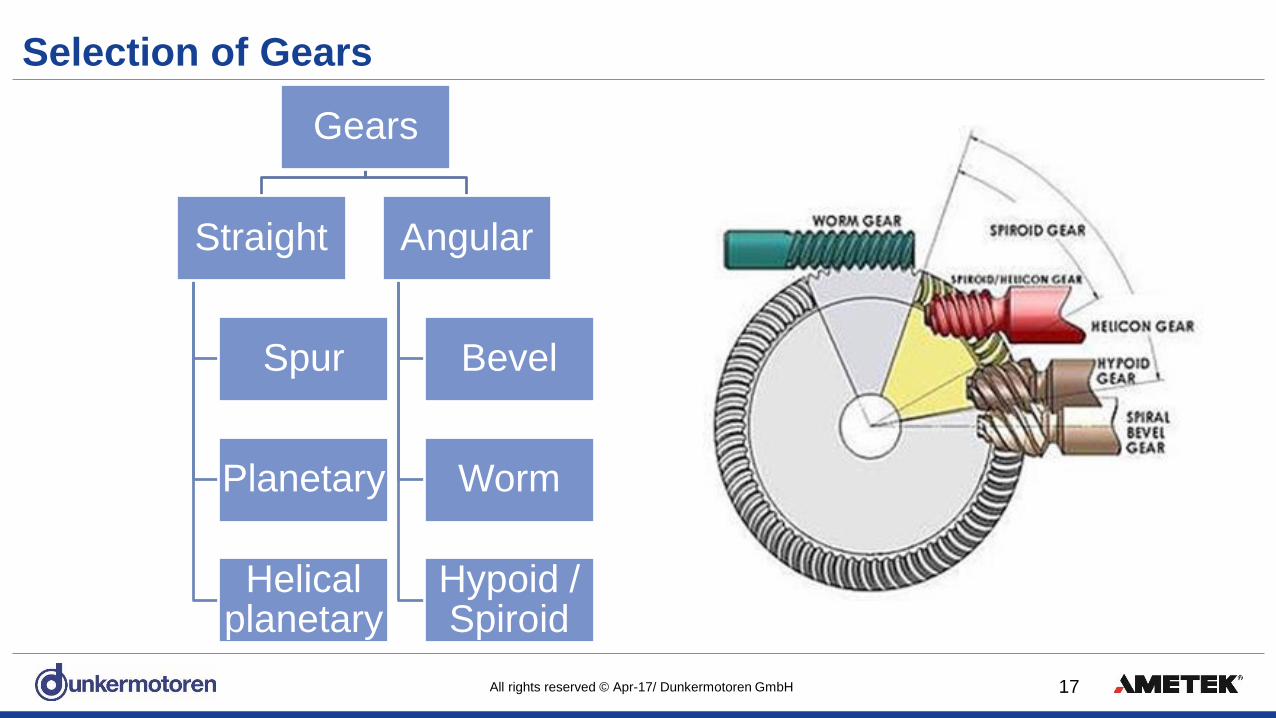
Gears
Straight
Spur
Planetary
Helical planetary
Angular
Bevel
Worm
Hypoid / Spiroid
All rights reserved © Apr-17/ Dunkermotoren GmbH
Selection of Gearboxes
18
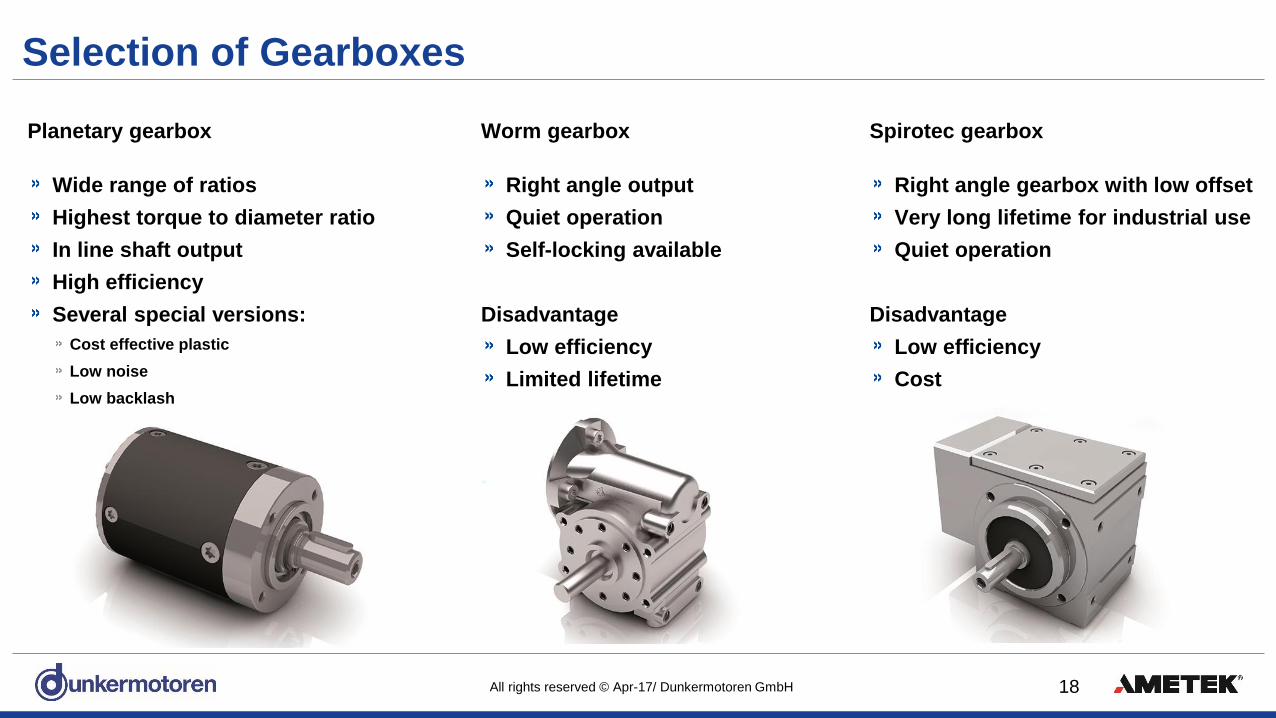
Planetary gearbox
Wide range of ratios
Highest torque to diameter ratio
In line shaft output
High efficiency
Several special versions:
Cost effective plastic
Low noise
Low backlash
Worm gearbox
Right angle output
Quiet operation
Self-locking available
Disadvantage
Low efficiency
Limited lifetime
Spirotec gearbox
Right angle gearbox with low offset
Very long lifetime for industrial use
Quiet operation
Disadvantage
Low efficiency
Cost
All rights reserved © Apr-17/ Dunkermotoren GmbH
Selection of Brakes
19
Brakes
Power-on vs. power-off brakes
Spring-applied vs. permanent-magnet brakes
Alternatively: Self-locking gearbox
All rights reserved © Apr-17/ Dunkermotoren GmbH
Selection of Encoders
20
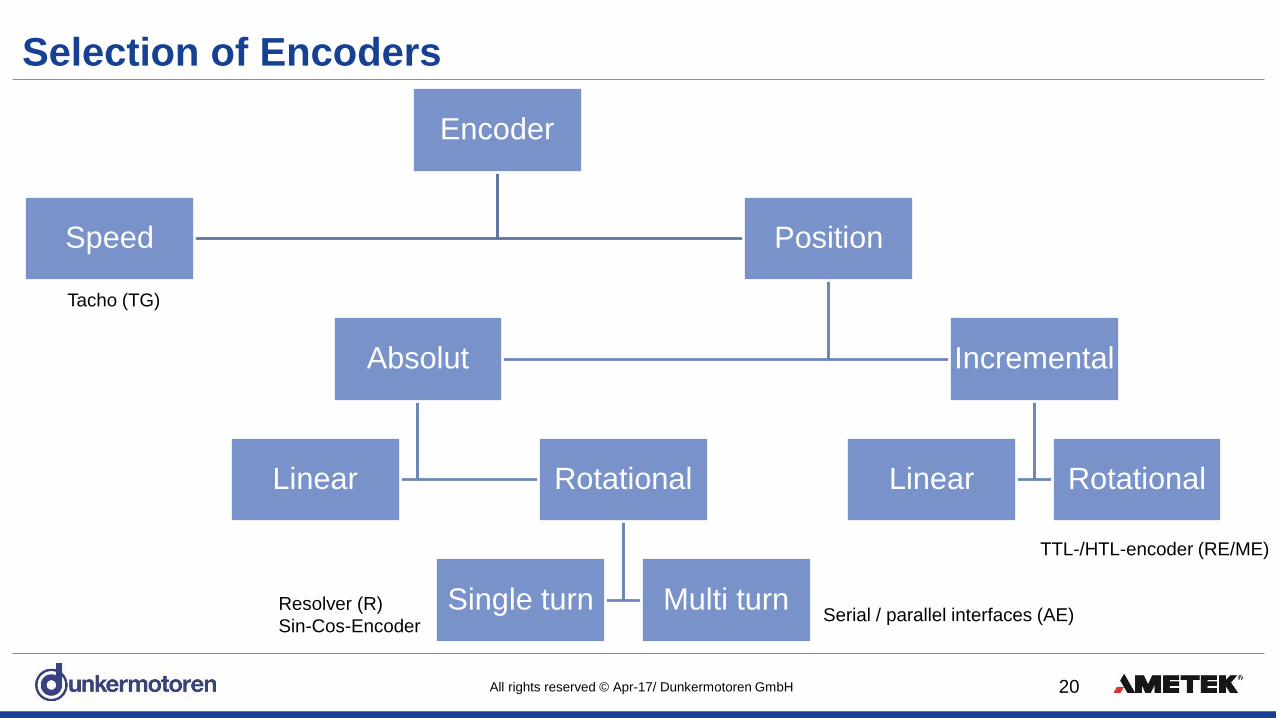
Encoder
Speed Position
Absolut
Linear Rotational
Single turn Multi turn
Incremental
Linear Rotational
Tacho (TG)
TTL-/HTL-encoder (RE/ME)
Serial / parallel interfaces (AE)Resolver (R)
Sin-Cos-Encoder
All rights reserved © Apr-17/ Dunkermotoren GmbH 21
(3) Selection of linear units
All rights reserved © Apr-17/ Dunkermotoren GmbH
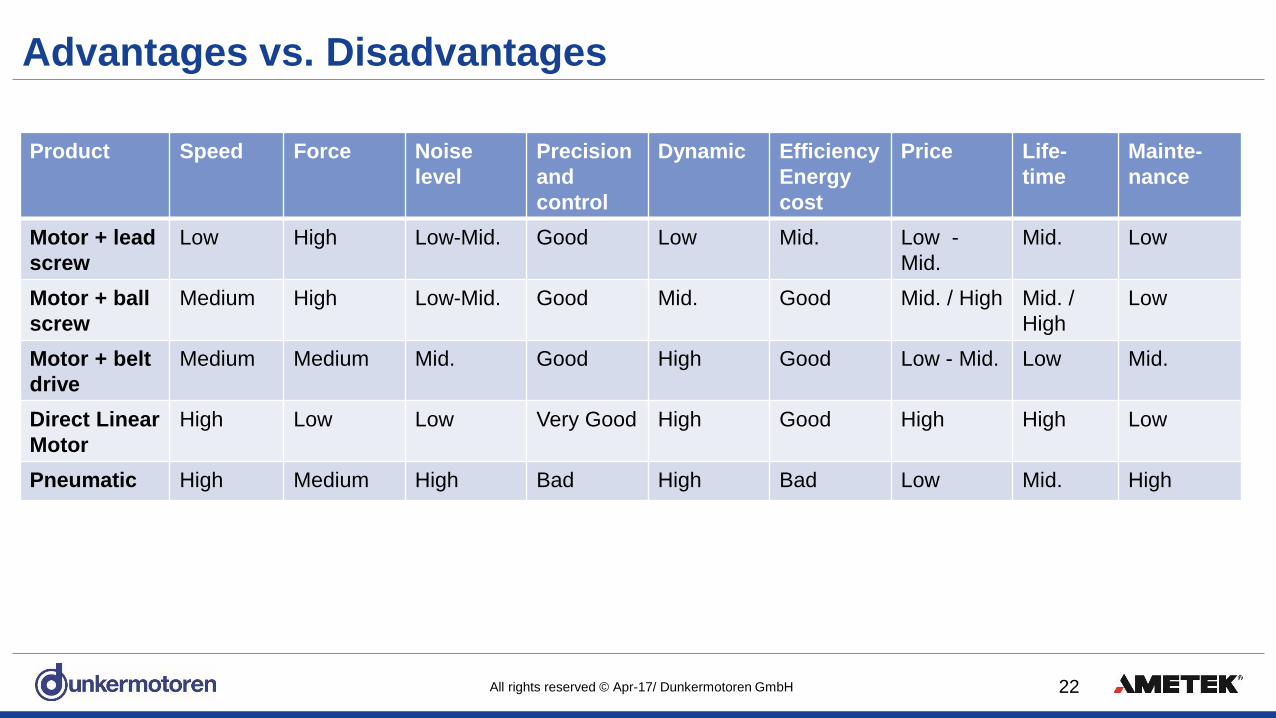
Product Speed Force Noise
level
Precision
and
control
Dynamic Efficiency
Energy
cost
Price Life-
time
Mainte-
nance
Motor + lead
screw
Low High Low-Mid. Good Low Mid. Low -
Mid.
Mid. Low
Motor + ball
screw
Medium High Low-Mid. Good Mid. Good Mid. / High Mid. /
High
Low
Motor + belt
drive
Medium Medium Mid. Good High Good Low - Mid. Low Mid.
Direct Linear
Motor
High Low Low Very Good High Good High High Low
Pneumatic High Medium High Bad High Bad Low Mid. High
Advantages vs. Disadvantages
22

All rights reserved © Apr-17/ Dunkermotoren GmbH
Overview linear products – Series ST | CASM | LS
23
Tubular linear motors:
Force up to 1860 N
Max. speed up to 9.3 m/s
Extremely dynamic & precise
Very long life-time
With integrated bus interface
Complete positioning module
Electric cylinders:
Peak force up to 5.4 kN
Speed up to 1 m/s²
In-line and parallel adapter
Long life-time
Positioning via digital inputs
Strokes up to 800 mm
Linear Spindle Motor:
Force up to 680 N
Speed up to 300 mm/s
Cost-efficient design
Linear Positioning Actuator:
Dynamic positioning with acceleration and deceleration ramps
Force up to 220 N
Positioning resolution up to ± 5 μm
Strokes up to 1000 mm
All rights reserved © Apr-17/ Dunkermotoren GmbH
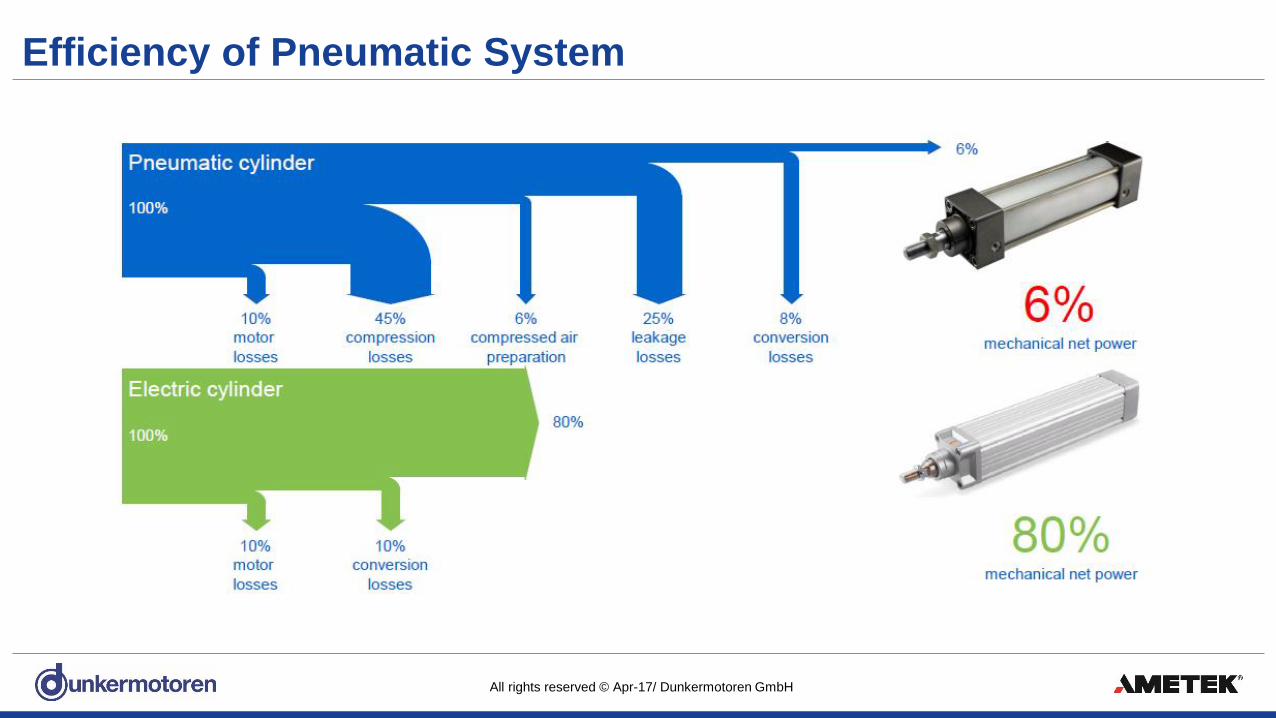
Efficiency of Pneumatic System
All rights reserved © Apr-17/ Dunkermotoren GmbH
Example Pneumatic:
63er Cylinder
6 bar Pressure -> ~ 1680N
400mm Stroke
15 Strokes per Minute
16 Hours/Day
-> Air consumption result of 238,7m³ per day -> based on 0,03€/m³ will give total costs of 7,16 € per day (w/o leakage!)
Electrical alternative: CASM40 with BG75x75
-> Max. ~0,5KWh x 0,16€/KWh x 16 Hours = 1,28 €
Energy costs at 225 working days (~1 year): CASM = 288.- € vs. Cylinder = 1611.- €
Energy cost
25
All rights reserved © Apr-17/ Dunkermotoren GmbH 26
(4) Selection of integrated drives
All rights reserved © Apr-17/ Dunkermotoren GmbH
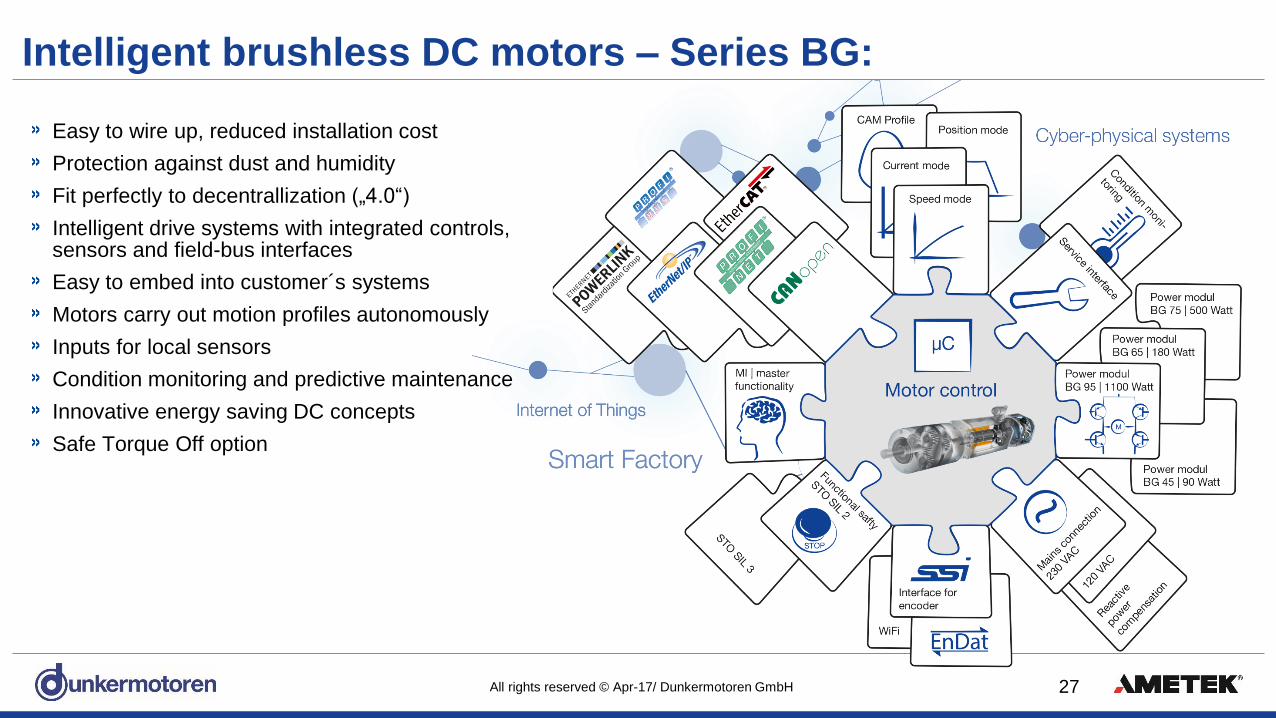
Intelligent brushless DC motors – Series BG:
27
Easy to wire up, reduced installation cost
Protection against dust and humidity
Fit perfectly to decentrallization („4.0“)
Intelligent drive systems with integrated controls, sensors and field-bus interfaces
Easy to embed into customer´s systems
Motors carry out motion profiles autonomously
Inputs for local sensors
Condition monitoring and predictive maintenance
Innovative energy saving DC concepts
Safe Torque Off option
All rights reserved © Apr-17/ Dunkermotoren GmbH
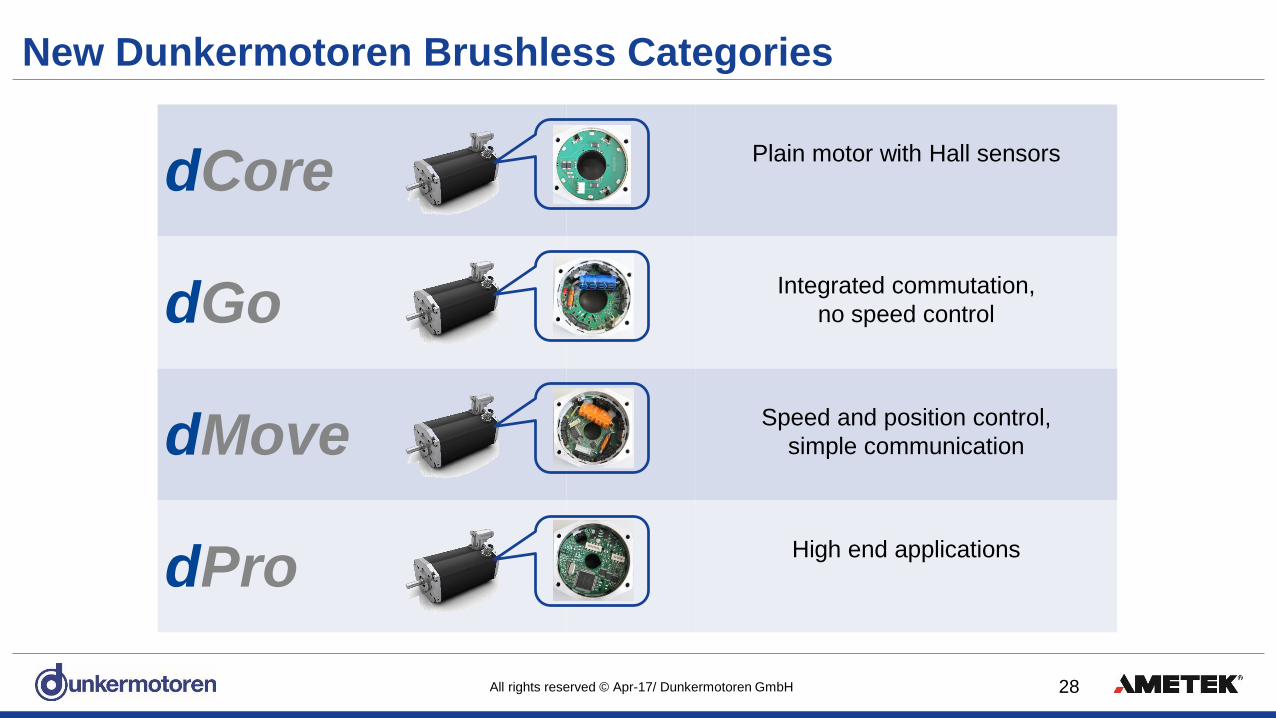
New Dunkermotoren Brushless Categories
28
dCorePlain motor with Hall sensors
dGoIntegrated commutation,
no speed control
dMoveSpeed and position control,
simple communication
dProHigh end applications
All rights reserved © Apr-17/ Dunkermotoren GmbH
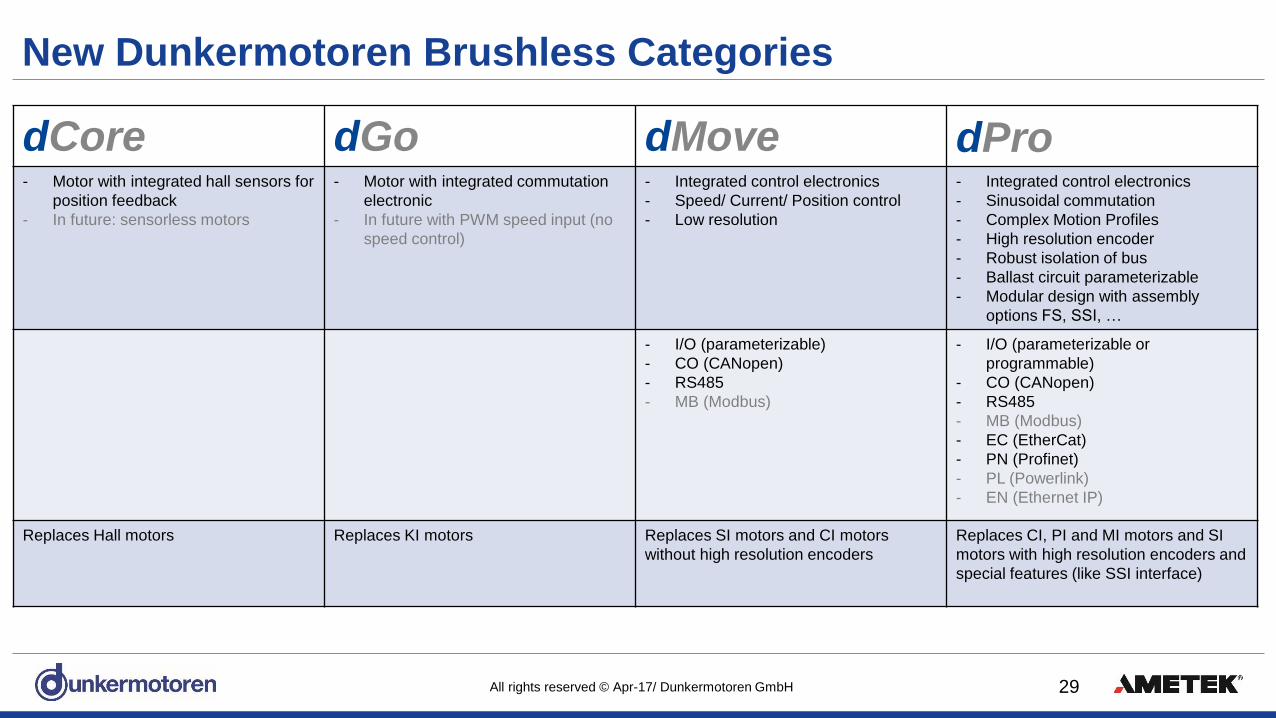
New Dunkermotoren Brushless Categories
29
dCore dGo dMove dPro- Motor with integrated hall sensors for
position feedback
- In future: sensorless motors
- Motor with integrated commutation
electronic
- In future with PWM speed input (no
speed control)
- Integrated control electronics
- Speed/ Current/ Position control
- Low resolution
- Integrated control electronics
- Sinusoidal commutation
- Complex Motion Profiles
- High resolution encoder
- Robust isolation of bus
- Ballast circuit parameterizable
- Modular design with assembly
options FS, SSI, …
- I/O (parameterizable)
- CO (CANopen)
- RS485
- MB (Modbus)
- I/O (parameterizable or
programmable)
- CO (CANopen)
- RS485
- MB (Modbus)
- EC (EtherCat)
- PN (Profinet)
- PL (Powerlink)
- EN (Ethernet IP)
Replaces Hall motors Replaces KI motors Replaces SI motors and CI motors
without high resolution encoders
Replaces CI, PI and MI motors and SI
motors with high resolution encoders and
special features (like SSI interface)
All rights reserved © Apr-17/ Dunkermotoren GmbH
For rotary and linear
Avaliable free of charge at www.dunkermotoren.com
Demonstration of DA3.0
Drive Assistant Software
30
All rights reserved © Apr-17/ Dunkermotoren GmbH
Thank you for your attention.
31
Recommended