POLARIS: Planning and Operations Language for Agent-based Regional Integrated Simulation
Dr. Kuilin Zhang [email protected]
Department of Civil and Environmental Engineering
Michigan Technological University Houghton, MI
Motivation
• The existing implementation gap between activity-based modeling (ABM) of travel demand and simulation-based dynamic traffic assignment (DTA) modeling of transportation network
• Not truly integrated: mostly existing implementations are decoupled using files as interface between ABM and DTA
• The knowledge barrier: Researchers from either demand or network side may simplify the other side models
• The use of the emerging high-performance parallel computing technologies in the hybrid multi-core CPU and many-core GPU systems
• Running 24-hour and second-by-second resolution of millions of travelers’ multidimensional travel decisions in large-scale metropolitan areas in a workstation or powerful laptop computer
• Can support real-time applications to support real-time traffic management center (TMC) operational strategies for uncertainty events by feeding real-time and historical traffic observations, traffic events, and traffic estimation and predictions
• An open source agent-based software design framework provides a new concept for performance and re-usability
POLARIS (Planning and Operations Language for Agent-based Regional Integrated Simulation)
• Sponsored by FHWA, USDOT, 2011-2013 • Model Traffic Management Centers and other ITS Systems • Enhance Interoperability among Demand, Network, and Operation Models
• Research Team – TRACC, Argonne National Laboratory • Hubert Ley (manager), Mike Hope (computing and visualization), Vadim Sokolov
(data interface and operation), Josh Auld (demand), Bo Xu (computing, now at HERE, Nokia), and Kuilin Zhang (network, now at Michigan Tech)
• Fundamental Goals and Philosophies • Develop transportation modeling implementation standards and protocols • Create an open source model development environment • Connect researchers from demand, network, and operation communities with a
common modeling language • Offer high-performance computing tools while maintaining flexibility and
modularity
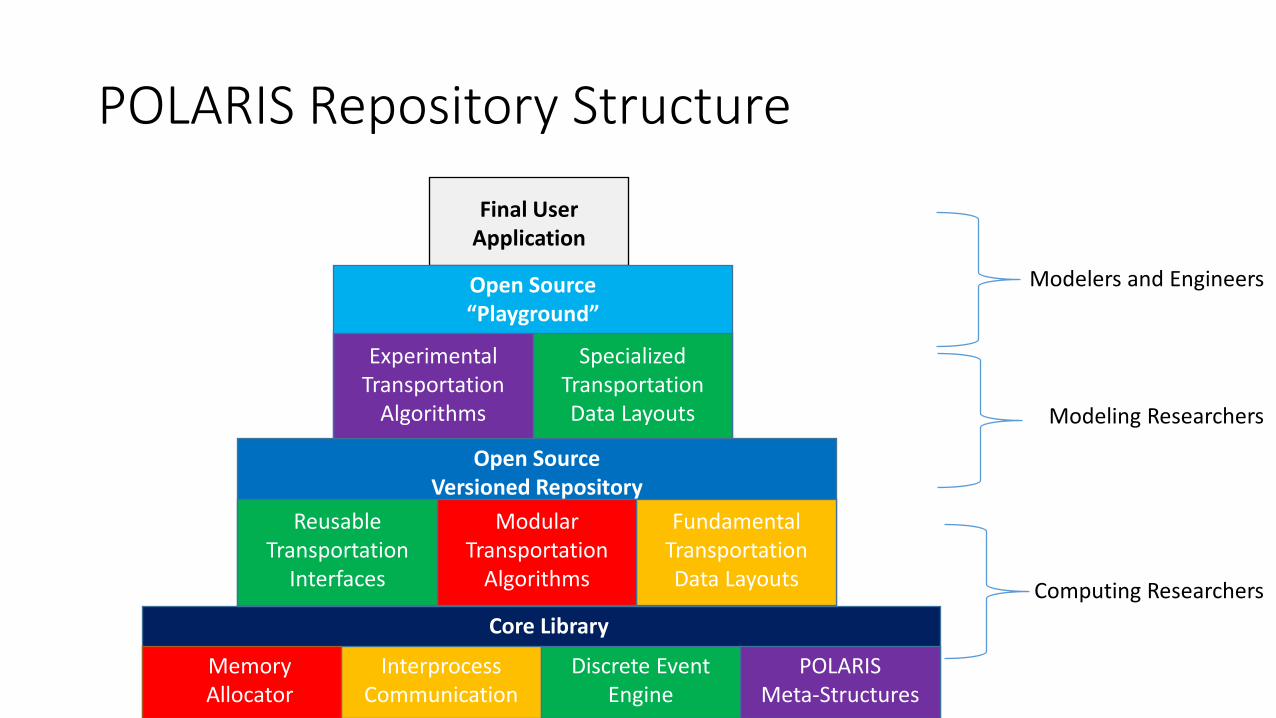
POLARIS Repository Structure
Core Library
Interprocess Communication
Discrete Event Engine
POLARIS Meta-Structures
Memory Allocator
Open Source Versioned Repository
Reusable Transportation
Interfaces
Fundamental Transportation Data Layouts
Final User Application
Modular Transportation
Algorithms
Open Source “Playground”
Specialized Transportation Data Layouts
Experimental Transportation
Algorithms
Computing Researchers
Modelers and Engineers
Modeling Researchers
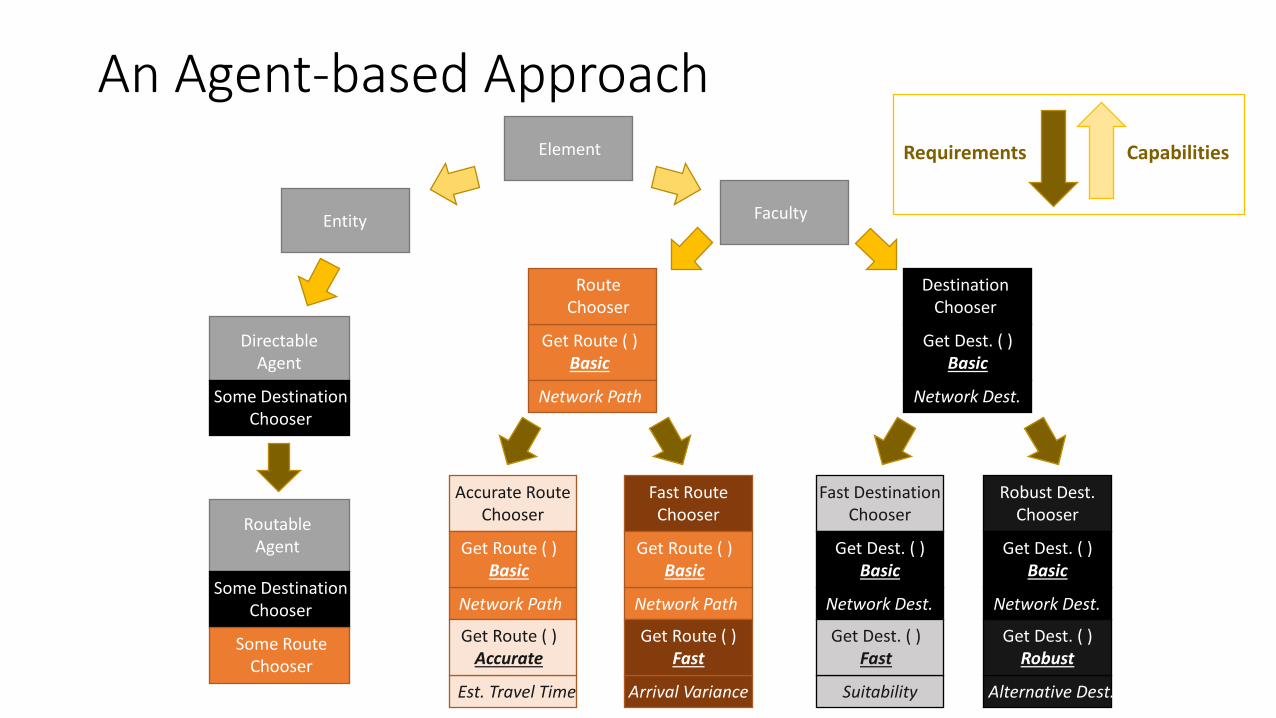
An Agent-based Approach
Element
Entity Faculty
Directable Agent
Routable Agent
Some Destination Chooser
Some Destination Chooser
Some Route Chooser
Get Route ( ) Basic
Network Path
Route Chooser
Network Path
Fast Route Chooser
Arrival Variance
Network Path
Accurate Route Chooser
Est. Travel Time
Get Dest. ( ) Basic
Network Dest.
Destination Chooser
Network Dest.
Fast Destination Chooser
Suitability
Network Dest.
Robust Dest. Chooser
Alternative Dest.
Get Dest. ( ) Fast
Get Dest. ( ) Robust
Get Route ( ) Basic
Get Route ( ) Accurate
Get Route ( ) Basic
Get Route ( ) Fast
Get Dest. ( ) Basic
Get Dest. ( ) Basic
Requirements Capabilities
POLARIS Core Library: Re-Usable Low Level Capabilities
• Discrete Event Engine and Automated Multi-Threading • Enable code writing from an agent-based perspective
• Memory Allocation Library • Optimized for use in transportation modeling applications
• Thread-Safe Structures • Specialized for time-dependent nature of simulations
• Inter-Process Communication for use in Cluster Computing • Ease connection and communication of disparate processes
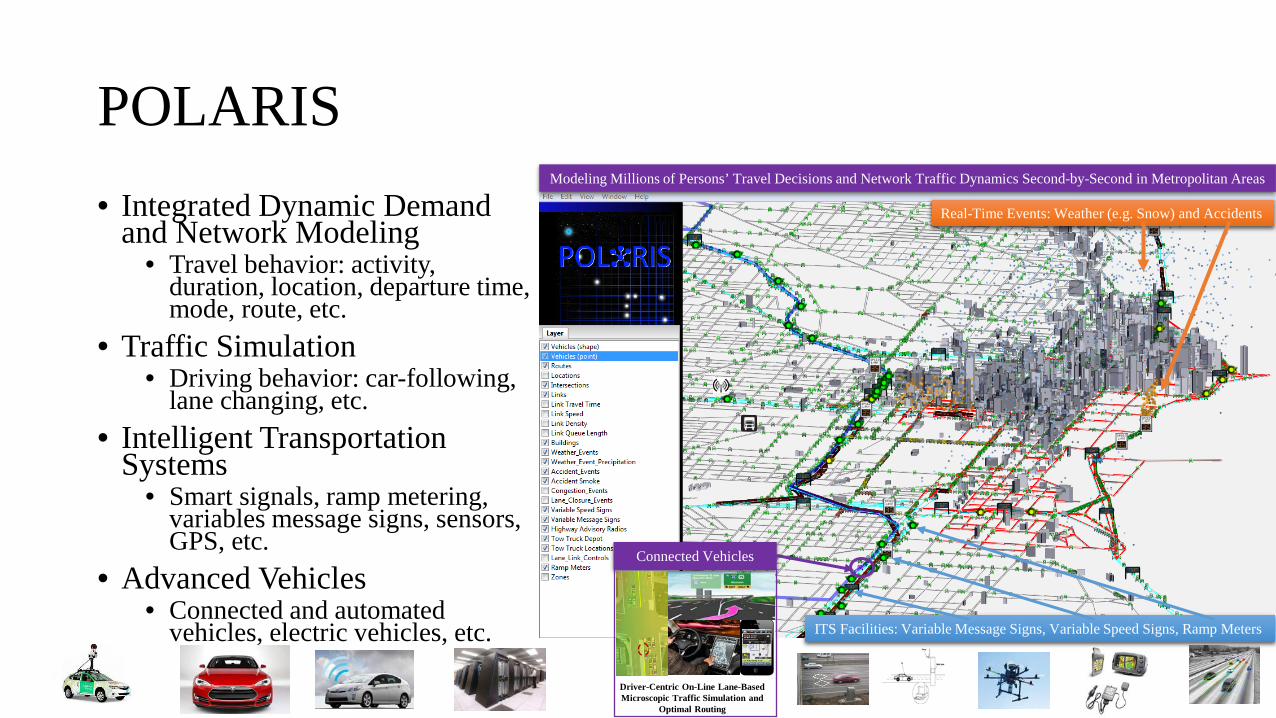
POLARIS • Integrated Dynamic Demand
and Network Modeling • Travel behavior: activity,
duration, location, departure time, mode, route, etc.
• Traffic Simulation • Driving behavior: car-following,
lane changing, etc. • Intelligent Transportation
Systems • Smart signals, ramp metering,
variables message signs, sensors, GPS, etc.
• Advanced Vehicles • Connected and automated
vehicles, electric vehicles, etc.
ITS Facilities: Variable Message Signs, Variable Speed Signs, Ramp Meters
Real-Time Events: Weather (e.g. Snow) and Accidents
Connected Vehicles
Driver-Centric On-Line Lane-Based Microscopic Traffic Simulation and
Optimal Routing
Modeling Millions of Persons’ Travel Decisions and Network Traffic Dynamics Second-by-Second in Metropolitan Areas
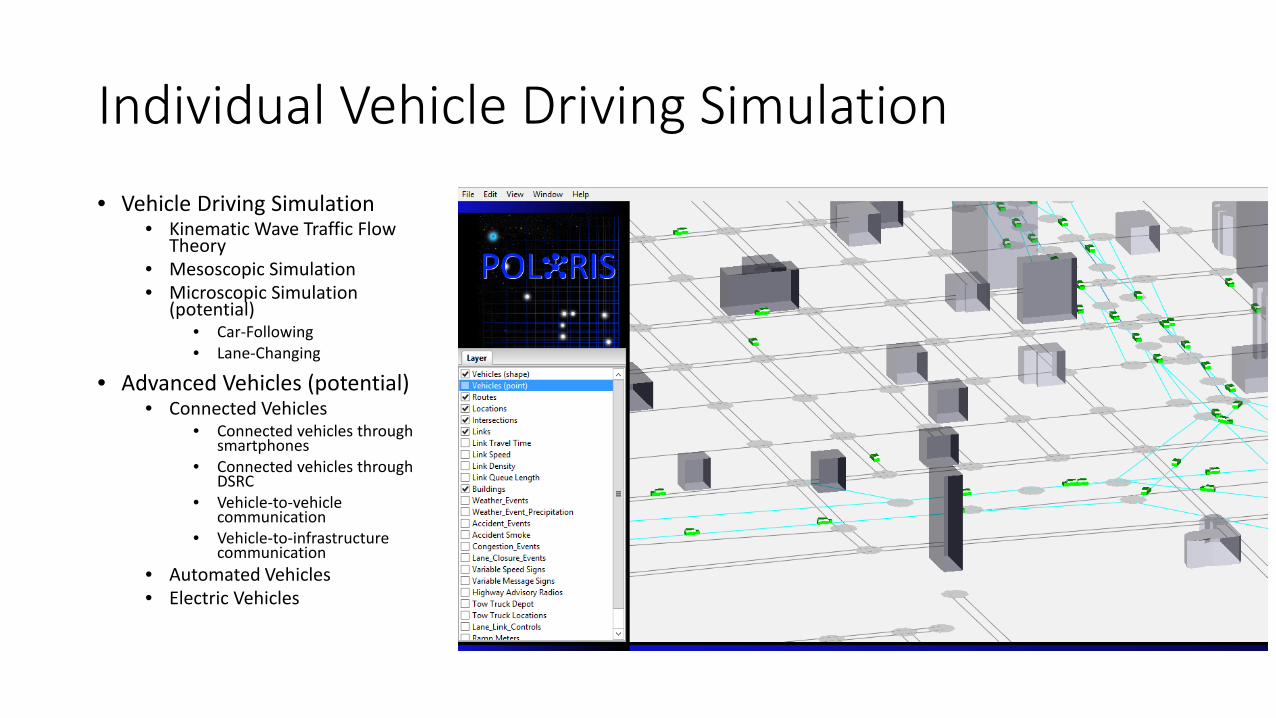
Individual Vehicle Driving Simulation • Vehicle Driving Simulation
• Kinematic Wave Traffic Flow Theory
• Mesoscopic Simulation • Microscopic Simulation
(potential) • Car-Following • Lane-Changing
• Advanced Vehicles (potential) • Connected Vehicles
• Connected vehicles through smartphones
• Connected vehicles through DSRC
• Vehicle-to-vehicle communication
• Vehicle-to-infrastructure communication
• Automated Vehicles • Electric Vehicles
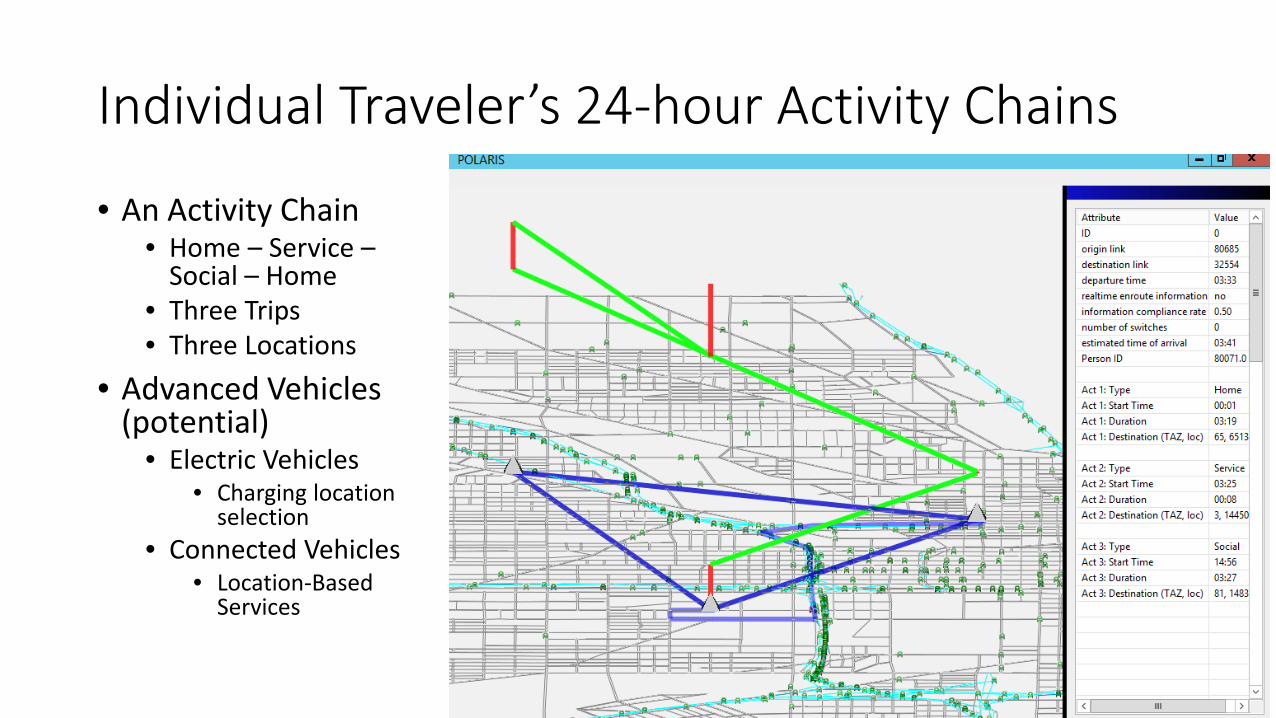
Individual Traveler’s 24-hour Activity Chains
• An Activity Chain • Home – Service –
Social – Home • Three Trips • Three Locations
• Advanced Vehicles (potential)
• Electric Vehicles • Charging location
selection • Connected Vehicles
• Location-Based Services
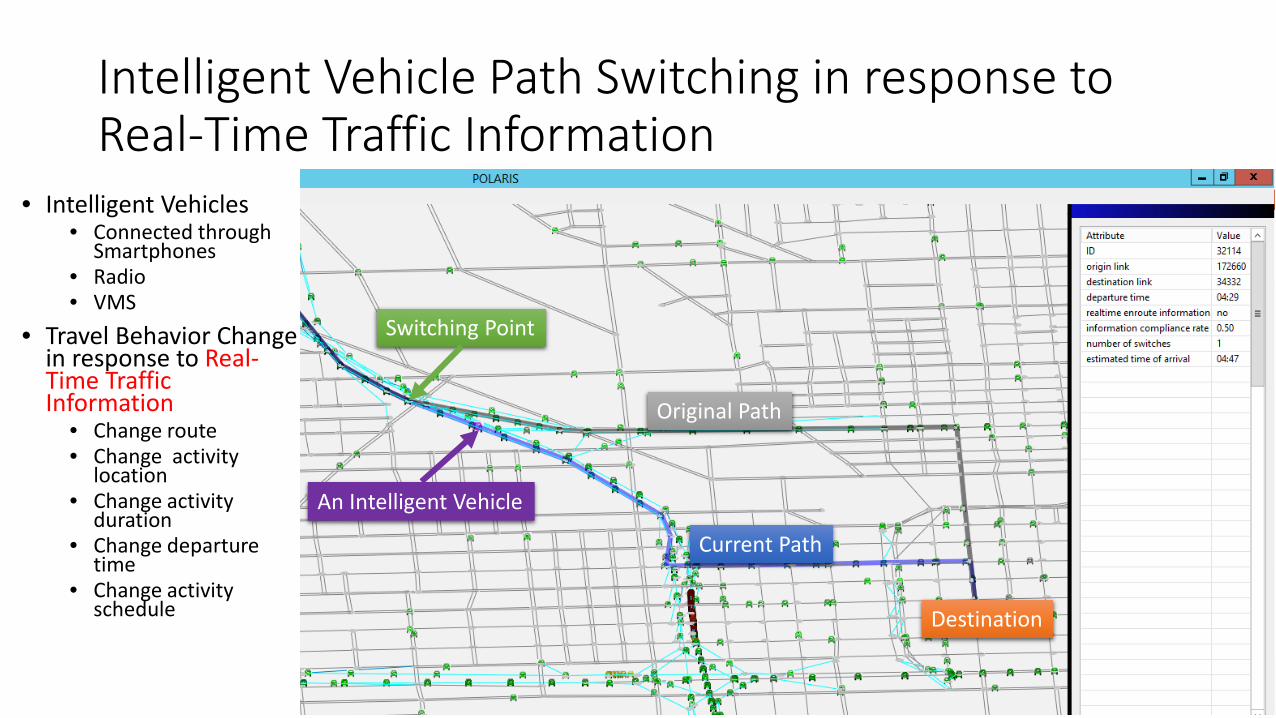
Intelligent Vehicle Path Switching in response to Real-Time Traffic Information
• Intelligent Vehicles • Connected through
Smartphones • Radio • VMS
• Travel Behavior Change in response to Real-Time Traffic Information
• Change route • Change activity
location • Change activity
duration • Change departure
time • Change activity
schedule
Original Path
Current Path
Destination
Switching Point
An Intelligent Vehicle
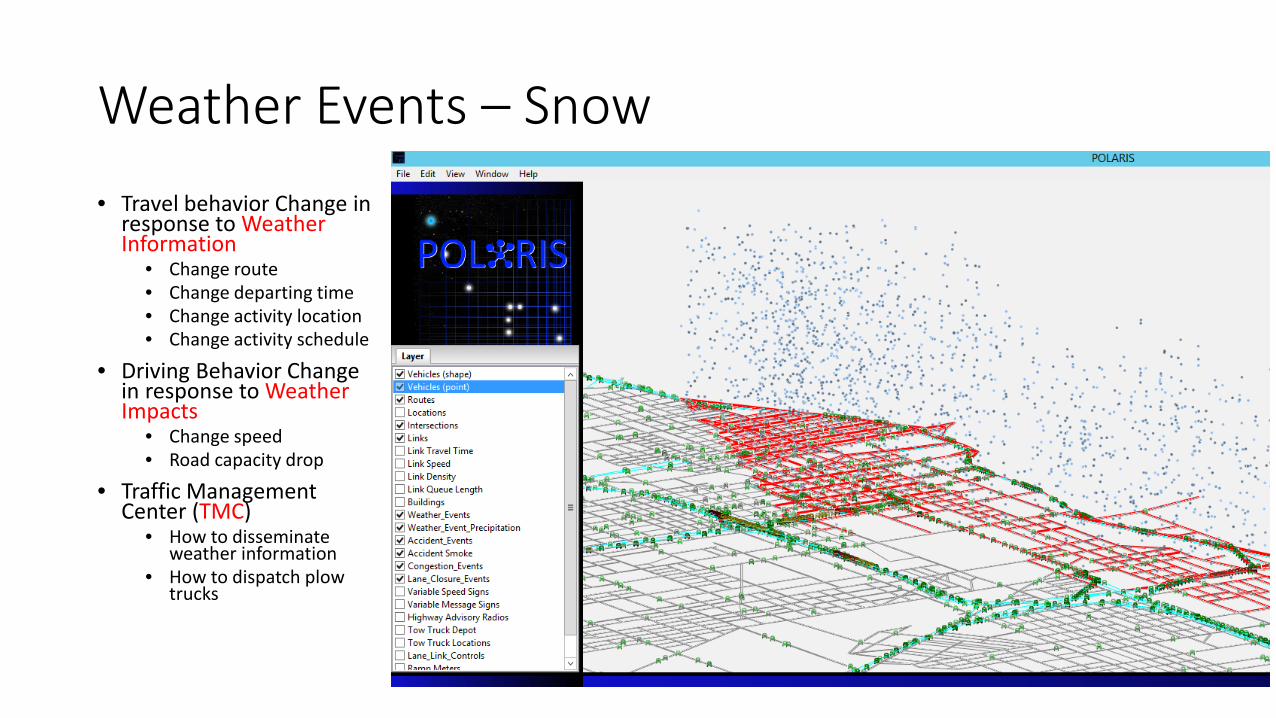
Weather Events – Snow • Travel behavior Change in
response to Weather Information
• Change route • Change departing time • Change activity location • Change activity schedule
• Driving Behavior Change in response to Weather Impacts
• Change speed • Road capacity drop
• Traffic Management Center (TMC)
• How to disseminate weather information
• How to dispatch plow trucks
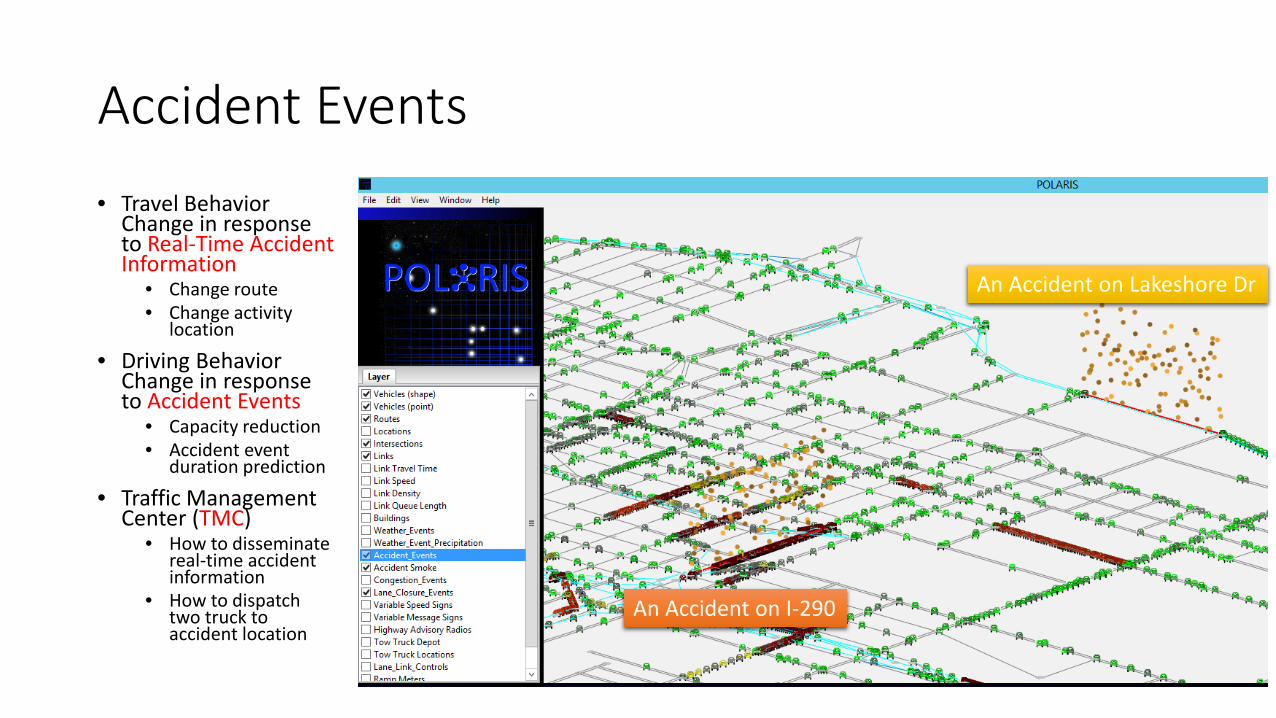
Accident Events • Travel Behavior
Change in response to Real-Time Accident Information
• Change route • Change activity
location
• Driving Behavior Change in response to Accident Events
• Capacity reduction • Accident event
duration prediction
• Traffic Management Center (TMC)
• How to disseminate real-time accident information
• How to dispatch two truck to accident location
An Accident on Lakeshore Dr
An Accident on I-290
Summary
• An open source transportation modeling development environment and language
• A set of core libraries provide memory efficient high-performance computing capabilities using an agent-based approach
• A 3D GUI for large-scale visualization and real-time interventions • Provide interfaces to model and simulate the travel and drive
decisions of the emerging advanced vehicle technologies such as connected, automated, and electrified vehicles
Recommended


















