Planning T(r)ips for Hybrid Electric Vehicles
How to Drive in the 21st Century
Andrew Wang and Peng Yu
16.S949 Student Lecture
May 14th, 2012
Andrew Wang and Peng Yu
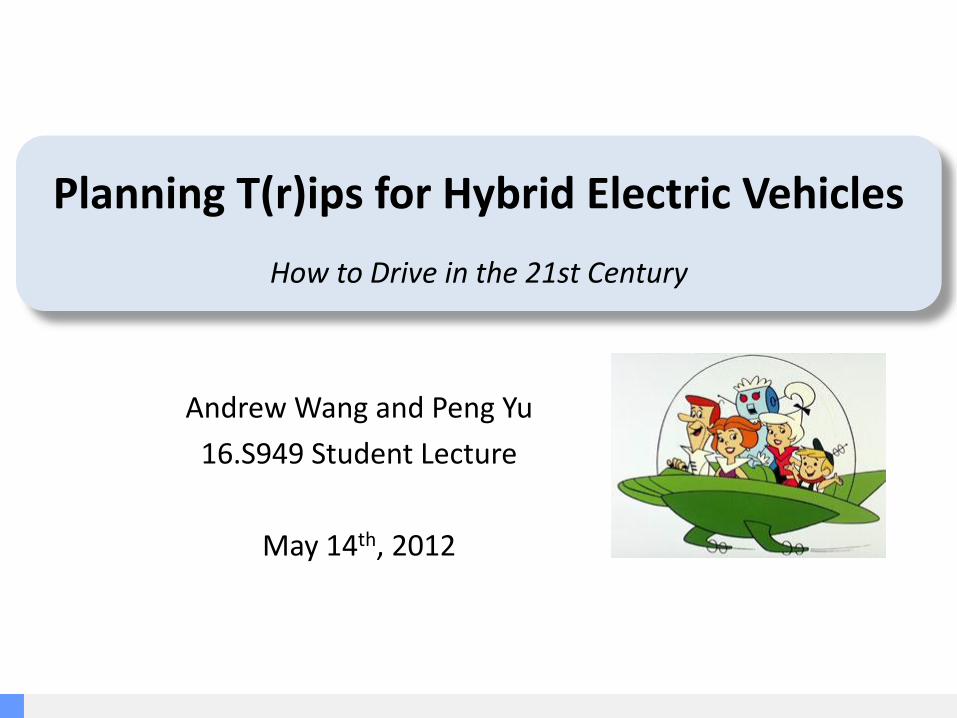
• Origin: Sid-Pac
• Destination: Revere St.
Meet Peng in 4 minutes.
Need to find a path.
Example
Planning Trips for Hybrid Electric Vehicles 2

Andrew Wang and Peng Yu
Google Maps gives
the path that minimizes
trip duration.
• Duration: 3.6 minutes.
• Fuel: 0.193L.
Example: least-time path
Planning Trips for Hybrid Electric Vehicles 3

Andrew Wang and Peng Yu
We can find a path that
minimize fuel usage[1].
• Duration: 5 minutes.
• Fuel: 0.152L.
That’s 25% saving!
But he will be late.
[1]R. K. Ganti, N. Pham, H. Ahmadi, S. Nangia, and T. F.
Abdelzaher. Greengps: a participatory sensing fuel efficient
maps application. In Proc. of MobiSys’10, pages 151–164,
San Francisco, CA, 2010.
Example: least-fuel path
Planning Trips for Hybrid Electric Vehicles 4

Andrew Wang and Peng Yu
We want to find the path that minimizes
fuel usage within the
timing constraint.
• Duration: 4 minutes.
• Fuel: 0.185L.
But how?
Example: least-fuel path that is on-time
Planning Trips for Hybrid Electric Vehicles 5

Andrew Wang and Peng Yu
• Motivation & Problem Formulation
• The Best Route
• The Best Driving Style
• Examples and Summary
Planning for Hybrid Electric Vehicles
Planning Trips for Hybrid Electric Vehicles 6
Source: D. J. C. MacKay, Sustainabl e Energy – Without the Hot Air, UIT Cambridge, 2009.

Andrew Wang and Peng Yu
• Toyota Prius was Japan’s best-selling car in 2011.
– 252,528 units sold over the year.
• Why do people like hybrid vehicles?
– 50% increase in City/Hwy MPG.
– 40% reduction in carbon emission.
Hybrid cars are popular!
Planning Trips for Hybrid Electric Vehicles 7
Pri
ce o
f fu
el
Year

Andrew Wang and Peng Yu
• Electric motor (batteries) and gasoline engine:
• Saving energy through:
– Keep the engine working in its efficient zone.
– Avoid low speed crawling with ignited engine.
The hybrid system
Planning Trips for Hybrid Electric Vehicles 8
Source: G. Davies, http://prius.ecrostech.com/original/Understanding/PowerTrain.htm, 2012.
Andrew Wang and Peng Yu
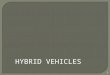
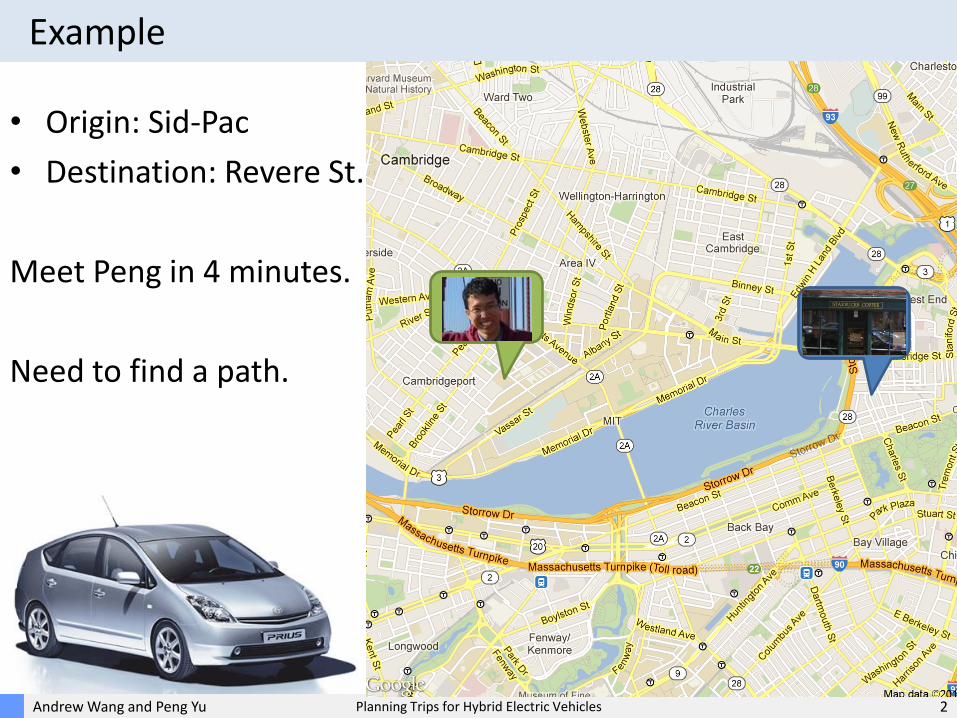
Superb low speed MPG
Planning Trips for Hybrid Electric Vehicles 9
0
10
20
30
40
50
60
70
80
90
0 10 20 30 40 50 60 70
Mil
e P
er G
all
on
Mile Per Hour
Fuel Consumption Rate: Toyota Prius and Volkswagen Golf
MPG (Prius)
MPG (Golf)
Source: US Environmental Protection Agency and metrompg.com

Andrew Wang and Peng Yu
Routing affects fuel economy
Planning Trips for Hybrid Electric Vehicles 10

Andrew Wang and Peng Yu
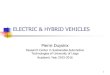
• Percent improvement via route-independent methods
– Avoid aggressive driving: 5 - 33%.
– Keep optimal fuel economy speed: 7 - 23%.
– Remove excess weight: 1 - 2%/100lb.
– Avoid excessive idling: 0.02 - 0.04 L/min.
Driving style affects fuel economy
Planning Trips for Hybrid Electric Vehicles 11
Source: US Department of Energy, www.fueleconomy.gov.
0% 2% 4% 6% 8% 10% 12% 14% 16% 18% 20%
Remove Excess Weight
Avoid Excessive Idling
Observe Speed Limit
Drive Sensibly
Fuel Economy Benefit

Andrew Wang and Peng Yu
• Input:
– Where you want to go in how long.
– A map of the road network with traffic conditions.
– A model of the hybrid car’s dynamics.
• Output:
– Recommend the route that satisfies timing constraints while minimizing fuel consumption.
– Provide driving guidance for avoiding aggressive driving and over-speed cruising.
A driving advisory system
Planning Trips for Hybrid Electric Vehicles 12
Image Source: Pratap Tokekar, Nikhil Karnad, and Volkan Isler.Energy-optimal velocity profiles for car-like robots. In ICRA, 2011(submitted).

Andrew Wang and Peng Yu
• Objective: Minimize the fuel consumption of a trip.
– By:
Choosing a smart route: Seg1, Seg2,...,SegN.
Using proper acceleration and braking: Acc1, Dec1,..., AccN, DecN.
And economy cruising speed: Vel1, Vel2,...,VelN.
– To minimize:
𝑇𝑜𝑡𝑎𝑙𝐺𝑎𝑠 = 𝐹𝑢𝑒𝑙(𝑆𝑒𝑔𝑘 , 𝐴𝑐𝑐𝑘 , 𝐷𝑒𝑐𝑘 , 𝑉𝑒𝑙𝑘)
𝑘=1…𝑁
The constrained optimization problem
Planning Trips for Hybrid Electric Vehicles 13

Andrew Wang and Peng Yu
• Time:
𝑇𝑖𝑚𝑒(𝑆𝑒𝑔𝑘 , 𝐴𝑐𝑐𝑘 , 𝐷𝑒𝑐𝑘, 𝑉𝑒𝑙𝑘)
𝑘=1…𝑁
< 𝑇𝑖𝑚𝑒𝐿𝑖𝑚𝑖𝑡
• Traffic: 𝑉𝑒𝑙𝑘 < 𝑆𝑝𝑒𝑒𝑑𝐿𝑖𝑚𝑖𝑡𝑘
• Vehicle dynamics:
∀𝑘, 𝐴𝑐𝑐𝑘 < 𝑀𝑎𝑥𝐴𝑐𝑐, 𝐷𝑒𝑐𝑘 < 𝑀𝑎𝑥𝐵𝑟𝑎𝑘𝑒
• A complete path connecting the origin and destination.
The constrained optimization problem
Planning Trips for Hybrid Electric Vehicles 14

Andrew Wang and Peng Yu
• Objective: Minimize the fuel consumption of a trip.
– By:
Choosing a smart route: Seg1, Seg2,...,SegN.
Using proper acceleration and braking: Acc1, Dec1,..., AccN, DecN.
And economy cruising speed: Vel1, Vel2,...,VelN.
1. Optimize the route.
2. Optimize the driving strategy.
The constrained optimization problem
Planning Trips for Hybrid Electric Vehicles 15

Andrew Wang and Peng Yu
• Motivation & Problem Formulation
• The Best Route
• The Best Driving Style
• Examples and Summary
Planning Trips for Hybrid Electric Vehicles 16
Planning for Hybrid Electric Vehicles
Andrew Wang and Peng Yu
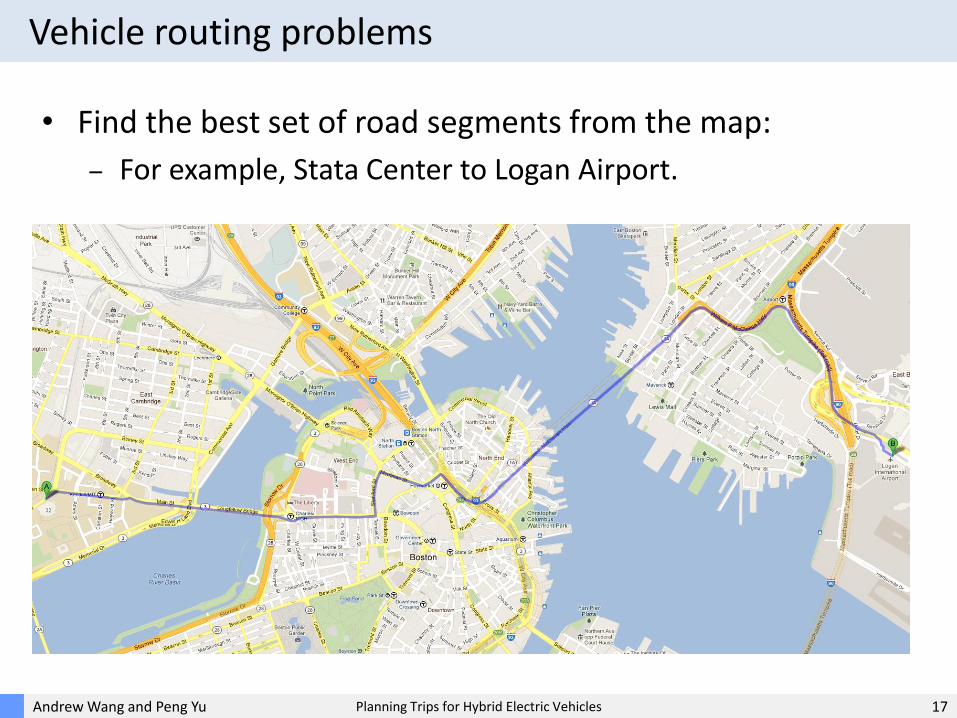
• Find the best set of road segments from the map:
– For example, Stata Center to Logan Airport.
Vehicle routing problems
Planning Trips for Hybrid Electric Vehicles 17

Andrew Wang and Peng Yu
• Find the best set of road segments from the map:
– Assume that we already know the fuel consumption and duration of each road segment.
Vehicle routing problems
Planning Trips for Hybrid Electric Vehicles 18
Driving Time: 𝑇𝑖𝑚𝑒(𝑆𝑒𝑔𝑘) e.g. 15 minutes
Fuel Consumption: 𝐹𝑢𝑒𝑙(𝑆𝑒𝑔𝑘) e.g. 0.05 L

Andrew Wang and Peng Yu
• To minimize:
𝑇𝑜𝑡𝑎𝑙𝐺𝑎𝑠 = 𝐹𝑢𝑒𝑙(𝑆𝑒𝑔𝑘)
𝑘=1…𝑁
• Subject to:
𝑇𝑖𝑚𝑒(𝑆𝑒𝑔𝑘)
𝑘=1…𝑁
< 𝑇𝑜𝑡𝑎𝑙𝑇𝑖𝑚𝑒
• An optimal constraint satisfaction problem!
Definition
Planning Trips for Hybrid Electric Vehicles 19

Andrew Wang and Peng Yu
• Constrained Bellman-Ford[1] routing algorithm.
– Treat the problem as a Multi-objective optimization.
– Search the entire Pareto Set.
• Using Breadth-first search and record all paths that are not dominated.
– Exponential worst-case complexity.
Exact solution
Planning Trips for Hybrid Electric Vehicles 20
[1] J. Jaffe, “Algorithms for finding path with multiple constraints”, Networks, vol. 14, pp.95-116, 1984.
0
5
10
15
20
25
0 2 4 6 8 10 12
Tim
e C
on
stra
int
Fuel Consumption

Andrew Wang and Peng Yu
• Recall: Dijkstra’s algorithm.
– Solves single-source shortest path problems.
– Successively update the distance to vertices with newly discovered shortest route.
Faster methods?
Planning Trips for Hybrid Electric Vehicles 21
A E
D
C
B
F 9
6
11
2 14
9
7 10
15

Andrew Wang and Peng Yu
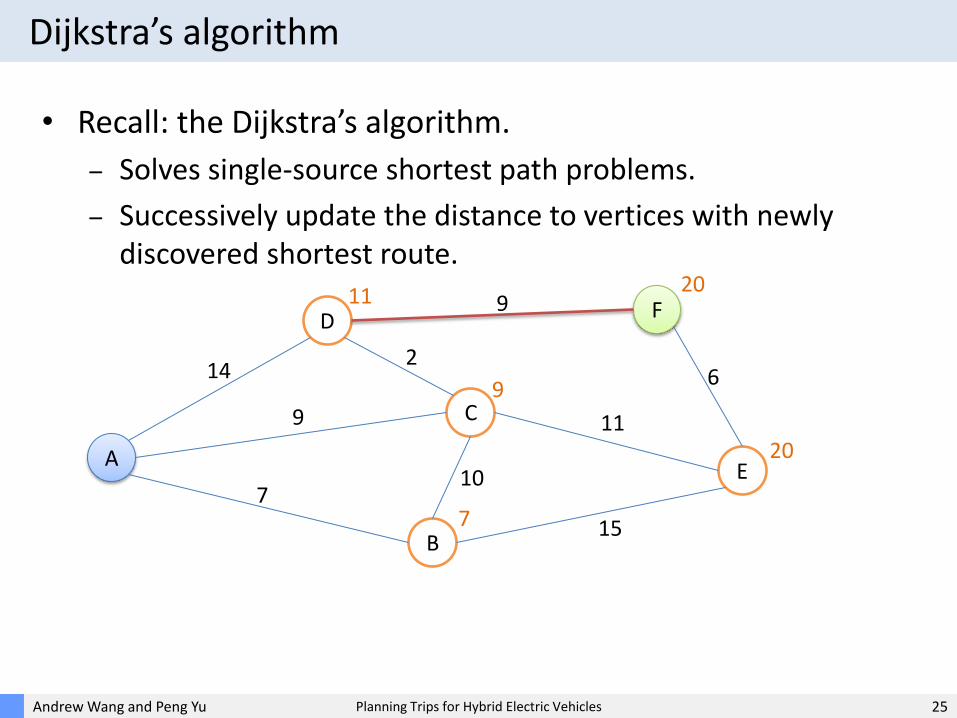
• Recall: the Dijkstra’s algorithm.
– Solves single-source shortest path problems.
– Successively update the distance to vertices with newly discovered shortest route.
Dijkstra’s algorithm
Planning Trips for Hybrid Electric Vehicles 22
A E
D
C
B
F 9
6
11
2 14
9
7 10
15
14
9
7

Andrew Wang and Peng Yu
• Recall: the Dijkstra’s algorithm.
– Solves single-source shortest path problems.
– Successively update the distance to vertices with newly discovered shortest route.
Dijkstra’s algorithm
Planning Trips for Hybrid Electric Vehicles 23
A E
D
C
B
F 9
6
11
2 14
9
7 10
15
14
9
7
22

Andrew Wang and Peng Yu
• Recall: the Dijkstra’s algorithm.
– Solves single-source shortest path problems.
– Successively update the distance to vertices with newly discovered shortest route.
Dijkstra’s algorithm
Planning Trips for Hybrid Electric Vehicles 24
A E
D
C
B
F 9
6
11
2 14
9
7 10
15
14→11
9
7
22→20
Andrew Wang and Peng Yu
• Recall: the Dijkstra’s algorithm.
– Solves single-source shortest path problems.
– Successively update the distance to vertices with newly discovered shortest route.
Dijkstra’s algorithm
Planning Trips for Hybrid Electric Vehicles 25
A E
D
C
B
F 9
6
11
2 14
9
7 10
15
11
9
7
20
20

Andrew Wang and Peng Yu
• Recall: the Dijkstra’s algorithm.
– Solves single-source shortest path problems.
– Successively update the distance to vertices with newly discovered shortest route.
– Runs in polynomial time: 𝑂 𝑉 2
– But, it does not guarantee satisfying the timing constraint!
Dijkstra’s algorithm
Planning Trips for Hybrid Electric Vehicles 26
A E
D
C
B
F 9
6
11
2 14
9
7 10
15
11
9
7
20
20

Andrew Wang and Peng Yu
• Modified from Dijkstra’s algorithm.
– Using Dijkstra’s algorithm to construct shortest path trees for both fuel consumption and time, starting from the end.
Backward Forward Heuristic (BFH) algorithm
Planning Trips for Hybrid Electric Vehicles 27

Andrew Wang and Peng Yu
• Modified from Dijkstra’s algorithm.
– Using Dijkstra’s algorithm to construct shortest path trees for both fuel consumption and time, starting from the end.
Backward Forward Heuristic (BFH) algorithm
Planning Trips for Hybrid Electric Vehicles 28
A E
D
C
B
F
14L; 2h
9L; 2h
2L; 0.2h
11L; 1h
15L; 3h
10L; 1h 7L; 0.5h
9L; 2h
6L; 1h

Andrew Wang and Peng Yu
• Modified from Dijkstra’s algorithm.
– Using Dijkstra’s algorithm to construct shortest path trees for both fuel consumption and time, starting from the end.
BFH: Create least-fuel tree and least-time tree
Planning Trips for Hybrid Electric Vehicles 29
A E
D
C
B
F
14L
9L
2L
11L
15L
10L 7L
9L
6L
0L 9L
6L
11L
21L
A E
D
C
B
F
2h
2h
0.2h
1h
3h
1h 0.5h
2h
1h
0h 2h
1h
2h
3h

Andrew Wang and Peng Yu
• Modified from Dijkstra’s algorithm.
– Using Dijkstra’s algorithm to construct shortest path trees for both fuel consumption and time, starting from the end.
BFH: Create least-fuel tree and least-time tree
Planning Trips for Hybrid Electric Vehicles 30
A E
D
C
B
F
14L; 2h
9L; 2h
2L; 0.2h
11L; 1h
15L; 3h
10L; 1h 7L; 0.5h
9L; 2h
6L; 1h
0L; 0h 9L; 2h
6L; 1h
11L; 2h
21L; 3h

Andrew Wang and Peng Yu
– Then start from the beginning, choose between the least time path and least fuel path to proceed.
• If the LFP satisfies timing constraint, proceed with it.
• Otherwise, proceed with LTP.
BFH: Restart from the beginning
Planning Trips for Hybrid Electric Vehicles 31
A E
D
C
B
F
14L; 2h
9L; 2h
2L; 0.2h
11L; 1h
15L; 3h
10L; 1h 7L; 0.5h
9L; 2h
6L; 1h
0L; 0h 9L; 2h
6L; 1h
11L; 2h
21L; 3h

Andrew Wang and Peng Yu
• If the LFP satisfies timing constraint, proceed with it.
• Otherwise, proceed with LTP.
– If the timing constraint is 4h.
BFH: Propagate with timing constraint
Planning Trips for Hybrid Electric Vehicles 32
A E
D
C
B
F
14L; 2h
9L; 2h
2L; 0.2h
11L; 1h
15L; 3h
10L; 1h 7L; 0.5h
9L; 2h
6L; 1h
0L; 0h 9L; 2h
6L; 1h
11L; 2h
21L; 3h

Andrew Wang and Peng Yu
• If the LFP satisfies timing constraint, proceed with it.
• Otherwise, proceed with LTP.
– If the timing constraint is 3.5h.
BFH: Propagate with timing constraint
Planning Trips for Hybrid Electric Vehicles 33
A E
D
C
B
F
14L; 2h
9L; 2h
2L; 0.2h
11L; 1h
15L; 3h
10L; 1h 7L; 0.5h
9L; 2h
6L; 1h
0L; 0h 9L; 2h
6L; 1h
11L; 2h
21L; 3h

Andrew Wang and Peng Yu
– If the timing constraint is 3.5h.
BFH: Propagate with timing constraint
Planning Trips for Hybrid Electric Vehicles 34
A E
D
B
F
14L; 2h
9L; 2h
2L; 0.2h
11L; 1h
15L; 3h
10L; 1h 7L; 0.5h
9L; 2h
6L; 1h
0L; 0h 9L; 2h
6L; 1h
11L; 2h
21L; 3h
C

Andrew Wang and Peng Yu
– If the timing constraint is 3.5h.
BFH: Propagate with timing constraint
Planning Trips for Hybrid Electric Vehicles 35
A E
D
B
F
14L; 2h
9L; 2h
2L; 0.2h
11L; 1h
15L; 3h
10L; 1h 7L; 0.5h
9L; 2h
6L; 1h
0L; 0h 9L; 2h
6L; 1h
11L; 2h
21L; 3h
C

Andrew Wang and Peng Yu
– If the timing constraint is 3.5h.
BFH: Propagate with timing constraint
Planning Trips for Hybrid Electric Vehicles 36
A E
D
B
F
14L; 2h
9L; 2h
2L; 0.2h
11L; 1h
15L; 3h
10L; 1h 7L; 0.5h
9L; 2h
6L; 1h
0L; 0h 9L; 2h
6L; 1h
11L; 2h
21L; 3h
C
Andrew Wang and Peng Yu
• The complexity is three times of Dijkstra’s algorithm.
• Usually generates suboptimal paths that satisfies timing constraint.
– The forward procedure only makes locally optimal decision.
– BFH paths usually less than 10% more expensive than optimal paths[1].
Backward Forward Heuristic (BFH) analysis
Planning Trips for Hybrid Electric Vehicles 37
[1] H. F. Salama, D. S. Reeves, and Y. Viniotis, “A distributed algorithm for delay-constrained unicast routing,” in Proc. IEEE INFOCOM’97, Japan, pp. 84–91.

Andrew Wang and Peng Yu
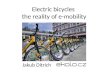
• The algorithm is efficient on large problems.
Runtime performance
Planning Trips for Hybrid Electric Vehicles 38
0
1
2
3
4
5
6
119 202 586 2415 7477 25765 51577 66231
Log
Ru
nti
me
(m
s)
Number of Nodes
BFH Runtime
Least Time Runtime

Andrew Wang and Peng Yu
• We benchmark the algorithm on various problems ranging from 100 nodes to 60000 nodes.
Runtime performance
Planning Trips for Hybrid Electric Vehicles 39

Andrew Wang and Peng Yu
• If we want to spend 20 - 40s more on the trip:
Quality of results
Planning Trips for Hybrid Electric Vehicles 40
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
119 202 586 2415 7477 25765 51577 66231
Imp
rove
me
nts
in F
ue
l Eff
icie
ncy
Number of Nodes

Andrew Wang and Peng Yu
• Motivation & Problem Formulation
• The Best Route
• The Best Driving Style
• Examples and Summary
Planning for Hybrid Electric Vehicles
Planning Trips for Hybrid Electric Vehicles 41

Andrew Wang and Peng Yu
• Find the best set of road segments from the map:
– Assume that we already know the fuel consumption and duration of each road segment.
Previously: Vehicle Routing Problems
Planning Trips for Hybrid Electric Vehicles 42
Driving Time: 𝑻𝒊𝒎𝒆(𝑺𝒆𝒈𝒌) e.g. 15 minutes
Fuel Consumption: 𝑭𝒖𝒆𝒍(𝑺𝒆𝒈𝒌) e.g. 0.05 L

Andrew Wang and Peng Yu
• Depends on driving behavior
• Depends on power management
– traditional: 𝑃𝑟𝑒𝑞 = 𝑃𝑖𝑐𝑒
– hybrid: 𝑃𝑟𝑒𝑞 = 𝑃𝑖𝑐𝑒 + 𝑃𝑒𝑚
• additional degree of freedom in the power split
• 𝑃𝑒𝑚 > 0 : battery discharging
• 𝑃𝑒𝑚 < 0 : battery charging
Finding 𝐹𝑢𝑒𝑙(𝑆𝑒𝑔𝑘) and 𝑇𝑖𝑚𝑒(𝑆𝑒𝑔𝑘)
Planning Trips for Hybrid Electric Vehicles 43
• through regenerative braking • or ICE driving EM
Andrew Wang and Peng Yu
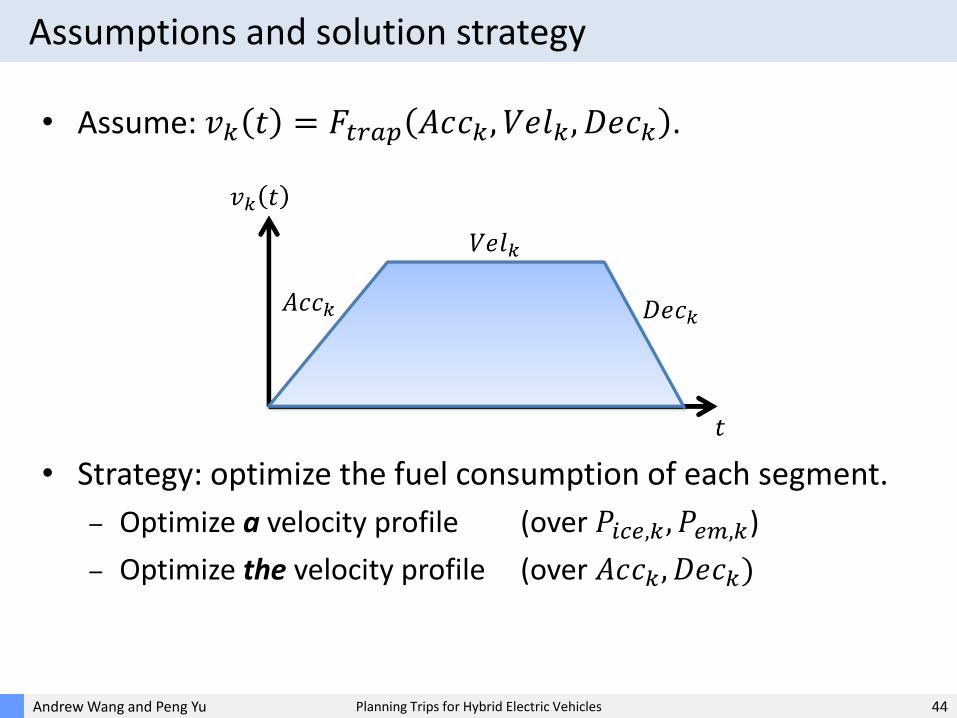
• Assume: 𝑣𝑘 𝑡 = 𝐹𝑡𝑟𝑎𝑝 𝐴𝑐𝑐𝑘 , 𝑉𝑒𝑙𝑘 , 𝐷𝑒𝑐𝑘 .
• Strategy: optimize the fuel consumption of each segment.
– Optimize a velocity profile (over 𝑃𝑖𝑐𝑒,𝑘 , 𝑃𝑒𝑚,𝑘)
– Optimize the velocity profile (over 𝐴𝑐𝑐𝑘 , 𝐷𝑒𝑐𝑘)
Assumptions and solution strategy
Planning Trips for Hybrid Electric Vehicles 44
Andrew Wang and Peng Yu
• Input: 𝑣 ⋅
• Objective: 𝐹𝑢𝑒𝑙(𝑆𝑒𝑔, 𝑣 ⋅ ) = min Δ𝑚𝑓
• Output: 𝑃𝑖𝑐𝑒 ⋅ , 𝑃𝑒𝑚(⋅), 𝐹𝑢𝑒𝑙(𝑆𝑒𝑔, 𝑣 ⋅ )
• Charge-sustaining constraints:
• SOC𝑚𝑖𝑛 < SOC < SOC𝑚𝑎𝑥
• SOC 𝑠𝑡𝑎𝑟𝑡 = SOC 𝑒𝑛𝑑 =1
2(SOC𝑚𝑖𝑛 + SOC𝑚𝑎𝑥)
Optimize a velocity profile: problem statement
Planning Trips for Hybrid Electric Vehicles 45
𝑃𝑒𝑚(⋅)
Andrew Wang and Peng Yu
• Mechanical power:
• 𝑃𝑟𝑒𝑞 = 𝑃𝑖𝑐𝑒 + 𝑃𝑒𝑚
• 𝑃𝑟𝑒𝑞 = 𝐹𝑟𝑒𝑞𝑣 = 𝐶𝐷𝑣2 +𝑀
𝑑𝑣
𝑑𝑡𝑣
• Fuel power:
•𝑑𝑚𝑓
𝑑𝑡=
1
𝐻𝑓⋅
𝑃𝑖𝑐𝑒
𝜂𝑖𝑐𝑒(𝑃𝑖𝑐𝑒)
• Electric power:
•𝑑SOC
𝑑𝑡= −
1
𝑄𝑚𝑎𝑥𝑉𝑏𝑎𝑡𝑡⋅
𝑃𝑒𝑚
𝜂𝑒𝑚(𝑃𝑒𝑚)
Optimize a velocity profile: modeling power flow
Planning Trips for Hybrid Electric Vehicles 46

Andrew Wang and Peng Yu
• Fuel is to gold as battery charge is to cash.
– fuel tank = personal stash of gold
– charge battery = put gold/cash into the bank
– discharge battery = take cash out of the bank
• Goal: retain as much gold as possible.
• Strategy: express everything in terms of gold.
– Equivalent Consumption Minimization Strategy (ECMS)
Optimize a velocity profile: solution by ECMS
Planning Trips for Hybrid Electric Vehicles 47
Source: L. Serrao, S. Onori, and G. Rizzoni, “A Comparative Analysis of Energy Management Strategies for Hybrid Electric Vehicles,” Journal of Dynamic Systems, Measurement, and Control, Vol. 133, May 2011.

Andrew Wang and Peng Yu
Pontryagin’s minimum principle:
• if 𝑃𝑒𝑚(⋅) is globally optimal
i.e. minimizes Δ𝑚𝑓 = 𝑚𝑓 𝑑𝑡,
• then at each time 𝑡, 𝑃𝑒𝑚 𝑡 is locally optimal w.r.t.
𝑚 𝑓,𝑒 𝑡 = 𝑚 𝑓 𝑡 + 𝜆(𝑡)𝑚 𝑏,𝑒 𝑡 .
• 𝑚 𝑏,𝑒 𝑡 =1
𝐻𝑓⋅
𝑃𝑒𝑚
𝜂𝑒𝑚(𝑃𝑒𝑚)
Optimize a velocity profile: ECMS algorithm
Planning Trips for Hybrid Electric Vehicles 48
Assume 𝜆 is constant. (actually depends on internal battery parameters)
Source: L. Serrao, S. Onori, and G. Rizzoni, “A Comparative Analysis of Energy Management Strategies for Hybrid Electric Vehicles,” Journal of Dynamic Systems, Measurement, and Control, Vol. 133, May 2011.

Andrew Wang and Peng Yu
Minimize:
𝑚 𝑓,𝑒 𝑡 = 𝑚 𝑓 𝑡 + 𝜆 𝑚 𝑏,𝑒 𝑡 .
• Algorithm:
1. Select 𝜆.
• Optimize 𝑃𝑒𝑚(𝑡) at all times 𝑡.
2. Simulate 𝑃𝑒𝑚(⋅) to determine SOC(𝑒𝑛𝑑).
3. Iterate on 1 and 2, using the Shooting Method to ensure SOC 𝑠𝑡𝑎𝑟𝑡 = SOC(𝑒𝑛𝑑).
Optimize a velocity profile: ECMS algorithm
Planning Trips for Hybrid Electric Vehicles 49
Illustration of the Shooting Method Source: http://en.wikipedia.org/wiki/Shooting_method

Andrew Wang and Peng Yu
Optimize a velocity profile: ECMS validation
Planning Trips for Hybrid Electric Vehicles 50
Dynamic Programming
ECMS
Source: P. Pisu and G. Rizzoni, “A Comparative Study of Supervisory Control Strategies for Hybrid Electric Vehicles,” IEEE Transactions on Control Systems Technology, Vol. 15, No. 3, May 2007.
Andrew Wang and Peng Yu
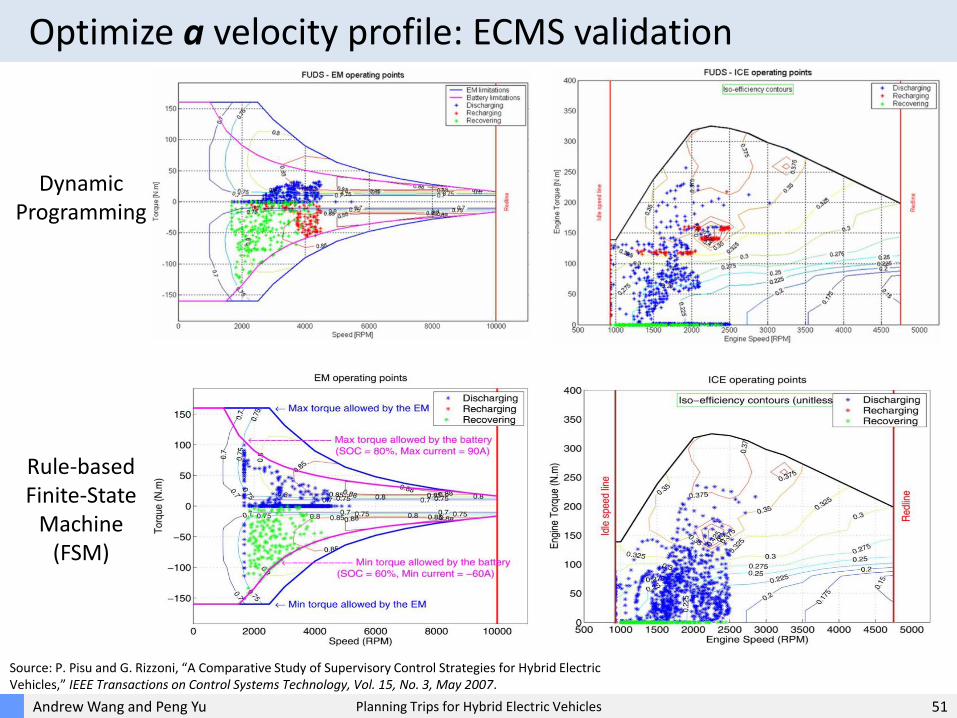
Optimize a velocity profile: ECMS validation
Planning Trips for Hybrid Electric Vehicles 51
Dynamic Programming
Rule-based Finite-State
Machine (FSM)
Source: P. Pisu and G. Rizzoni, “A Comparative Study of Supervisory Control Strategies for Hybrid Electric Vehicles,” IEEE Transactions on Control Systems Technology, Vol. 15, No. 3, May 2007.

Andrew Wang and Peng Yu
Optimize a velocity profile: ECMS validation
Planning Trips for Hybrid Electric Vehicles 52
Source: C. Musardo, G. Rizzoni, and B. Staccia, “A-ECMS: An adaptive Algorithm for Hybrid Elecric Vehicle Energy Management,” Proceedings of the 44th IEEE Conference on Decision and Control, 2005.
Source: P. Pisu and G. Rizzoni, “A Comparative Study of Supervisory Control Strategies for Hybrid Electric Vehicles,” IEEE Transactions on Control Systems Technology, Vol. 15, No. 3, May 2007.

Andrew Wang and Peng Yu
• Input: 𝐷𝑖𝑠𝑡, 𝑆𝑝𝑒𝑒𝑑𝐿𝑖𝑚𝑖𝑡
• Objective: 𝐹𝑢𝑒𝑙 𝑆𝑒𝑔 = min𝐹𝑢𝑒𝑙(𝑆𝑒𝑔, 𝑣 ⋅ )
• Subject to constraints:
• 0 < 𝑨𝒄𝒄 < 𝑀𝑎𝑥𝐴𝑐𝑐, 0 < 𝑫𝒆𝒄 < 𝑀𝑎𝑥𝐵𝑟𝑎𝑘𝑒
• 𝑽𝒆𝒍 = 𝑆𝑝𝑒𝑒𝑑𝐿𝑖𝑚𝑖𝑡
• 𝑣 ⋅ = 𝐹𝑡𝑟𝑎𝑝(𝐴𝑐𝑐, 𝑉𝑒𝑙, 𝐷𝑒𝑐)
• 𝑣 𝑡 𝑑𝑡 = 𝐷𝑖𝑠𝑡
• Output: 𝑣∗(⋅) 𝐹𝑢𝑒𝑙 𝑆𝑒𝑔 𝑇𝑖𝑚𝑒 𝑆𝑒𝑔 = min 𝑡
Optimize the velocity profile
Planning Trips for Hybrid Electric Vehicles 53
𝐴𝑐𝑐, 𝐷𝑒𝑐
𝑣∗ 𝑡 = 0 𝑡 > 0

Andrew Wang and Peng Yu
Summary of algorithms
Planning Trips for Hybrid Electric Vehicles 54
𝑃𝑟𝑒𝑞 = 𝑃𝑖𝑐𝑒 + 𝑃𝑒𝑚
𝐹𝑢𝑒𝑙(𝑆𝑒𝑔) 𝑇𝑖𝑚𝑒(𝑆𝑒𝑔)
𝑣(𝑡)
BFH
𝑣∗(𝑡) optimizer
ECMS

Andrew Wang and Peng Yu
• Motivation & Problem Formulation
• The Best Route
• The Best Driving Style
• Examples and Summary
Planning for Hybrid Electric Vehicles
Planning Trips for Hybrid Electric Vehicles 55

Andrew Wang and Peng Yu
• We would like to get to the destination with minimum fuel consumption through:
– Selecting the best route.
– Optimizing the driving style.
• In addition, we want to satisfy the timing constraints.
– Drive to the Logan airport from the Stata Center in 15 minutes.
Recall: The Driving Problem
Planning Trips for Hybrid Electric Vehicles 56

Andrew Wang and Peng Yu
• Path selected by the algorithm.
• Driving profile.
Results: hybrid car
Planning Trips for Hybrid Electric Vehicles 57
0 0.5 1 1.5 2 2.5 3 3.50
10
20
30
40
50
60
70
80
90
Distance (km)
Velo
city (
km
/h)

Andrew Wang and Peng Yu
• Volkswagen Golf
Non-hybrid cars
Planning Trips for Hybrid Electric Vehicles 58

Andrew Wang and Peng Yu
• Path selected by the algorithm.
• Driving profile.
Non-hybrid cars
Planning Trips for Hybrid Electric Vehicles 59
0 0.5 1 1.5 2 2.5 3 3.50
10
20
30
40
50
60
70
80
90

Andrew Wang and Peng Yu
• Problems solved:
– How to select the path that minimize fuel cost, while satisfying timing constraints.
– The best driving style/modes that minimize the fuel consumption.
• Remarks
– The modeling and optimization of energy systems can be very hard.
– Suboptimal approaches may save a lot of time.
• Hybrid cars (and ECO driving modes) do help save fuel!
Summary
Planning Trips for Hybrid Electric Vehicles 60

Andrew Wang and Peng Yu
• Fuel efficient path generator:
– Compute a path for your trip based on OpenStreetMap Database, then project on Google Map.
– Satisfies your timing constraint while minimizing fuel consumption.
– Available for Prius and Golf, in Cambridge and Boston area.
– http://people.csail.mit.edu/yupeng/files/16S949.zip
Byproduct
Planning Trips for Hybrid Electric Vehicles 61
Recommended