1
Overview of Storage and Indexing
Yanlei DiaoUMass Amherst
Feb 13, 2007
Slides Courtesy of R. Ramakrishnan and J. Gehrke
2
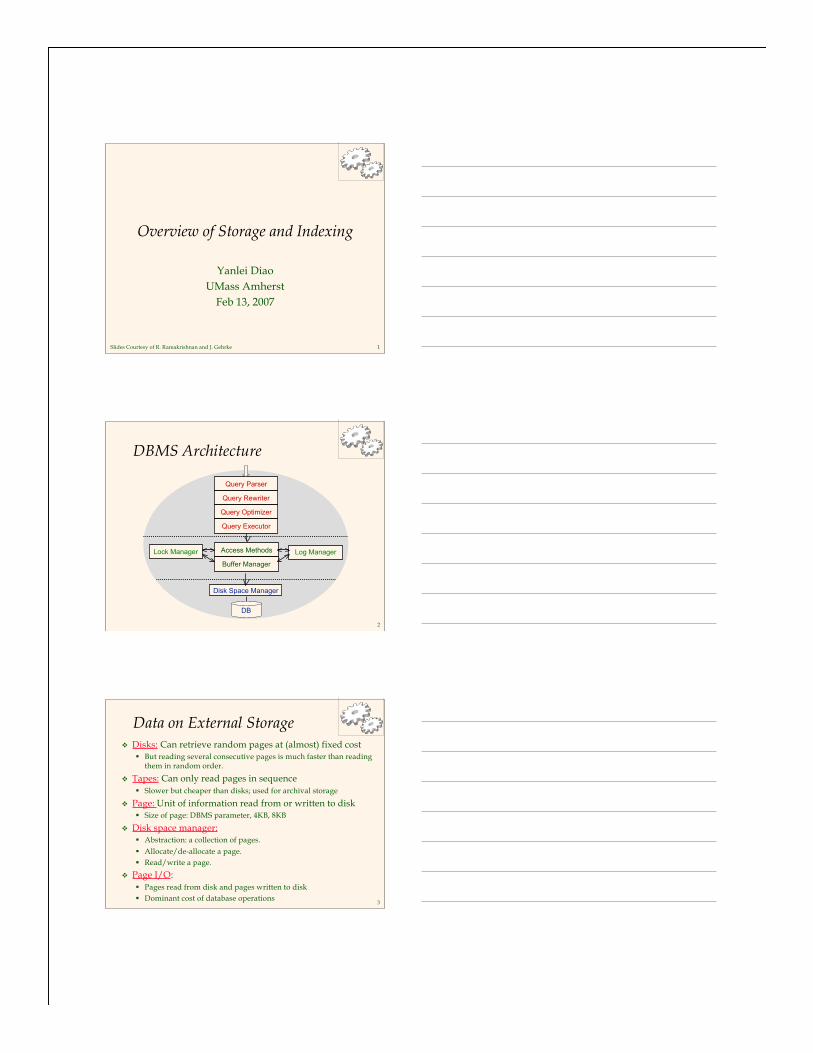
DBMS Architecture
Disk Space Manager
DB
Access Methods
Buffer Manager
Query Parser
Query Rewriter
Query Optimizer
Query Executor
Lock Manager Log Manager
3
Data on External Storage Disks: Can retrieve random pages at (almost) fixed cost
But reading several consecutive pages is much faster than readingthem in random order.
Tapes: Can only read pages in sequence Slower but cheaper than disks; used for archival storage
Page: Unit of information read from or written to disk Size of page: DBMS parameter, 4KB, 8KB
Disk space manager: Abstraction: a collection of pages. Allocate/de-allocate a page. Read/write a page.
Page I/O: Pages read from disk and pages written to disk Dominant cost of database operations
4
Access Methods Access methods: routines to manage various disk-based
data structures. Files of records Various kinds of indexes
File of records: Important abstraction of external storage in a DBMS! Record id (rid) is sufficient to physically locate a record
Indexes: Auxiliary data structures Given a value in the index search key field(s), find the record
ids of records with this value
5
Buffer Management Architecture:
Data is read into memory for processing Data is written to disk for persistent storage
Buffer manager stages pages between externalstorage and main memory buffer pool.
Access method layer makes calls to the buffermanager.
6
Access Methods
Many alternatives exist, each ideal for somesituations, and not so good for others: Heap (unorder) files: Suitable when typical access
is a file scan retrieving all records. Sorted Files: Best if records are retrieved in order
of the sorting attribute(s), or only a `range’ ofrecords is needed.
Indexes: Data structures to organize records viatrees or hashing.
• Like sorted files, they speed up searches for a subset ofrecords, based on values in certain (“search key”) fields
• Updates are much faster than in sorted files.
7
Indexes An index on a file speeds up selections on the search key
field(s) for the index. Any subset of the fields of a relation can be the search key for an
index on the relation. Search key is not the same as key (minimal set of fields that
uniquely identify a record in a relation).
An index contains a collection of data entries, andsupports efficient retrieval of all data entries k* with agiven key value k. Data entry (in an index) versus data record (in a file). Given a data entry k*, we can find record(s) with the key k in at
most one disk I/O. (Details soon …)
8
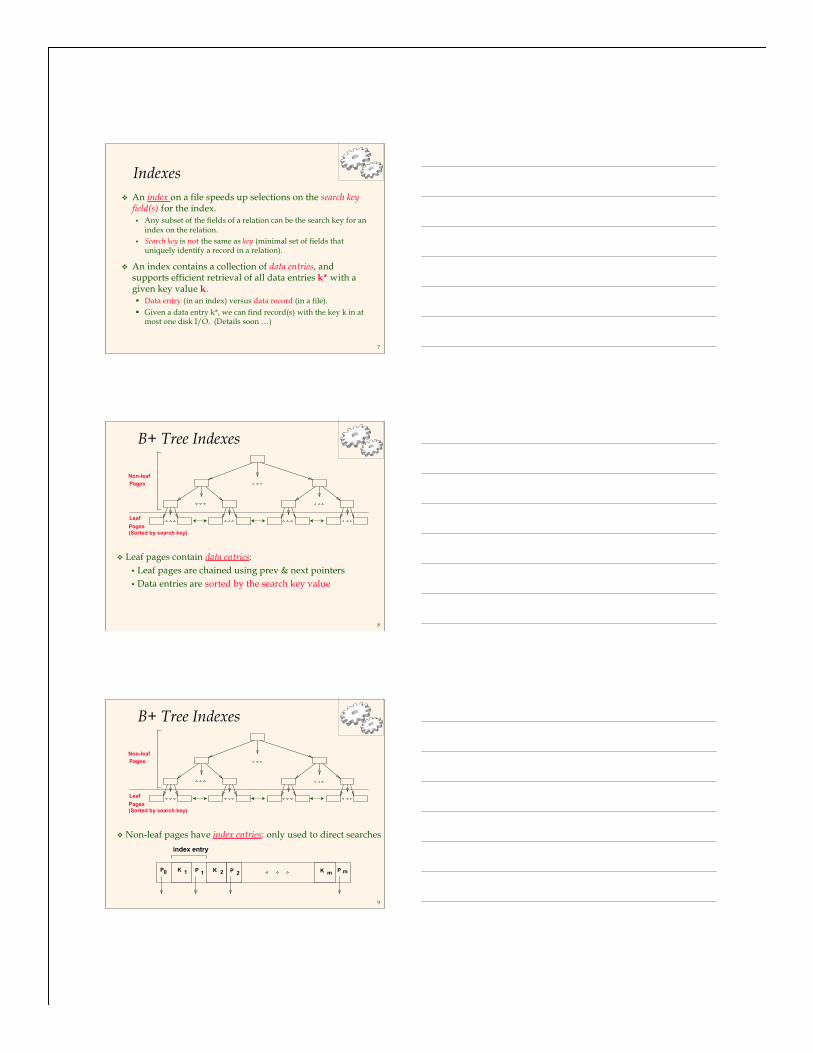
B+ Tree Indexes
Leaf pages contain data entries:• Leaf pages are chained using prev & next pointers• Data entries are sorted by the search key value
Non-leafPages
Pages (Sorted by search key)
Leaf
9
B+ Tree Indexes
Non-leaf pages have index entries; only used to direct searches
P0 K 1 P 1 K 2 P 2 K m P m
index entry
Non-leafPages
Pages (Sorted by search key)
Leaf
10
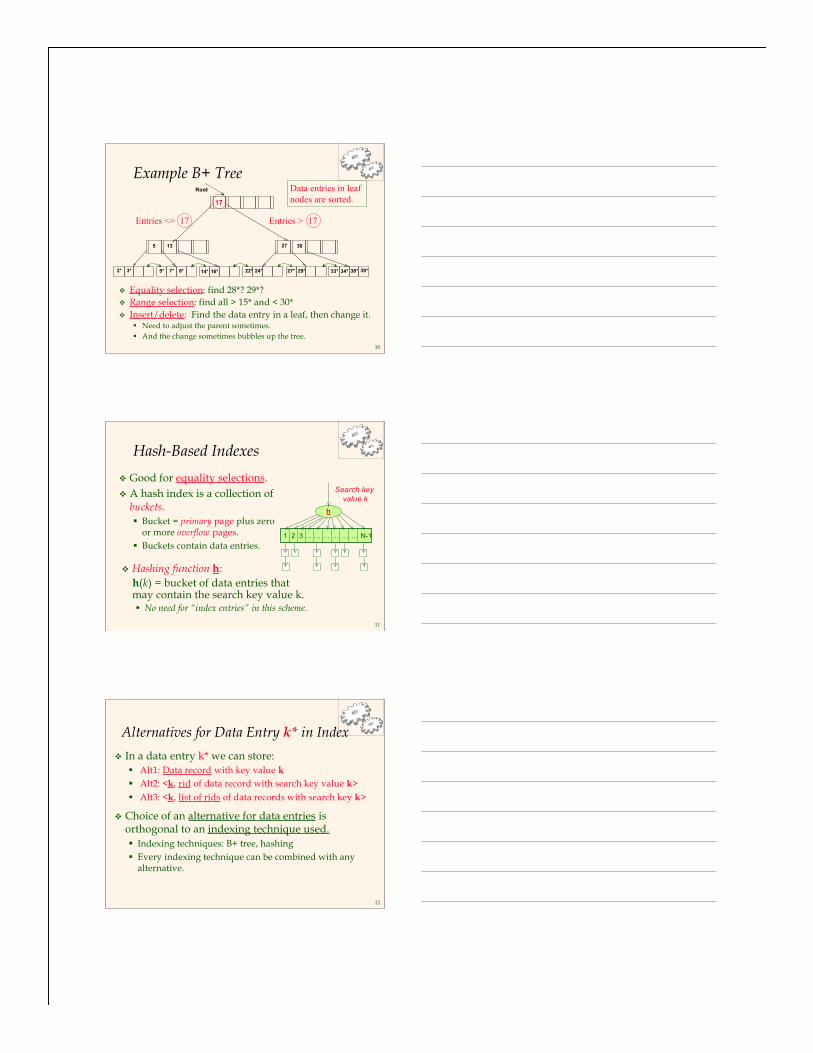
Example B+ Tree
Equality selection: find 28*? 29*? Range selection: find all > 15* and < 30* Insert/delete: Find the data entry in a leaf, then change it.
Need to adjust the parent sometimes. And the change sometimes bubbles up the tree.
2* 3*
Root
17
30
14* 16* 33* 34* 38* 39*
135
7*5* 8* 22* 24*
27
27* 29*
Entries <= 17 Entries > 17
Data entries in leaf nodes are sorted.
11
Hash-Based Indexes
Good for equality selections. A hash index is a collection of
buckets. Bucket = primary page plus zero
or more overflow pages. Buckets contain data entries.
h
1 2 3 … … … … … … N-1
Search key value k
Hashing function h: h(k) = bucket of data entries that
may contain the search key value k. No need for “index entries” in this scheme.
12
Alternatives for Data Entry k* in Index
In a data entry k* we can store: Alt1: Data record with key value k Alt2: <k, rid of data record with search key value k> Alt3: <k, list of rids of data records with search key k>
Choice of an alternative for data entries isorthogonal to an indexing technique used. Indexing techniques: B+ tree, hashing Every indexing technique can be combined with any
alternative.
13
Alternative 1 for Data Entries
Alternative 1: Index structure itself is a file organization for data
records (instead of a Heap or sorted file).
At most one index on a given collection of data recordscan use Alternative 1.
• Otherwise, data records are duplicated, leading to redundantstorage and potential inconsistency.
If data records are very large, # of pages containingdata entries is high.
• Size of the index structure to direct searches (e.g., non-leafnodes in B+ tree) can also be large.
14
Alternatives 2, 3 for Data Entries
Alternatives 2 and 3: Data entries, <k, rid(s)>, typically much smaller than
data records.• Index structure used to direct search is much smaller than
with Alternative 1.• So, better than Alternative 1 with large data records,
especially if search keys are small.
Alternative 3 more compact than Alternative 2• In the presence of multiple K* entries!
Alternative 3 leads to variable sized data entries,even if search keys are of fixed length.
• Variable sizes records/data entries are hard to manage.
15
Index Classification
Primary index vs. secondary index: If search key contains the primary key, then called
primary index. Other indexes are called secondary indexes.
Unique index: Search key contains a candidatekey. No data entries can have the same search key value.
Recall: Key? Primary key? Candidate key?
16
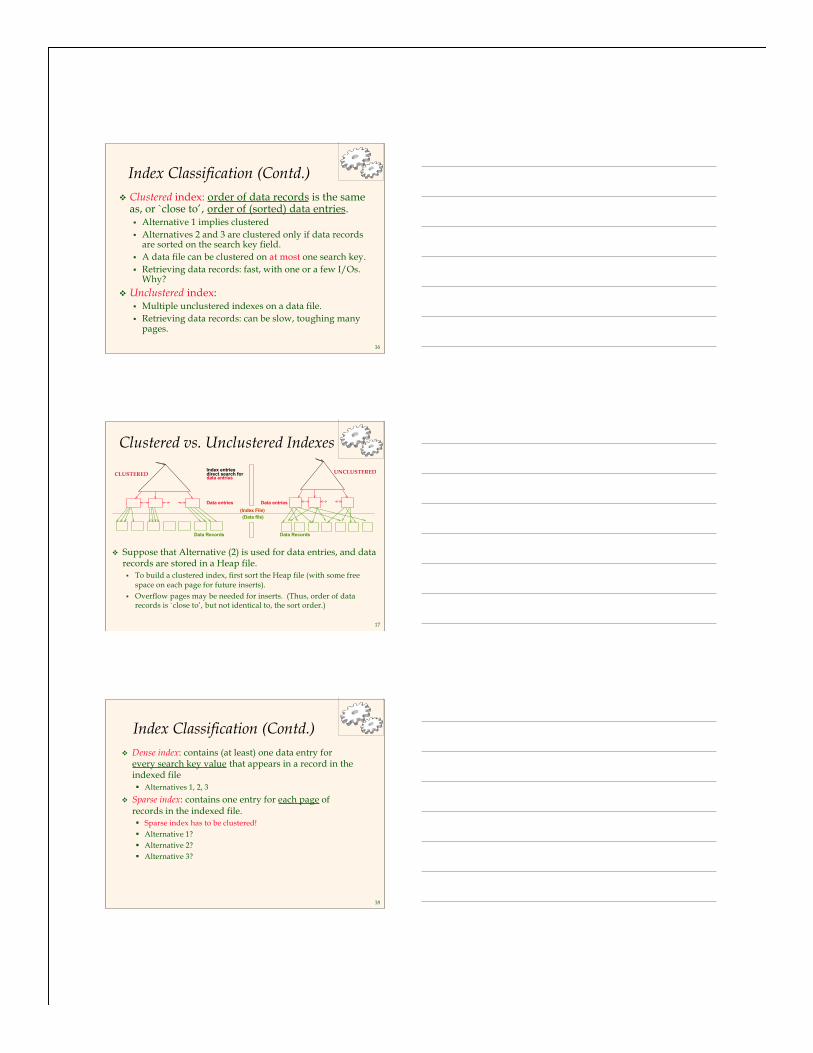
Index Classification (Contd.) Clustered index: order of data records is the same
as, or `close to’, order of (sorted) data entries. Alternative 1 implies clustered Alternatives 2 and 3 are clustered only if data records
are sorted on the search key field. A data file can be clustered on at most one search key. Retrieving data records: fast, with one or a few I/Os.
Why? Unclustered index:
Multiple unclustered indexes on a data file. Retrieving data records: can be slow, toughing many
pages.
17
Clustered vs. Unclustered Indexes
Suppose that Alternative (2) is used for data entries, and datarecords are stored in a Heap file. To build a clustered index, first sort the Heap file (with some free
space on each page for future inserts). Overflow pages may be needed for inserts. (Thus, order of data
records is `close to’, but not identical to, the sort order.)
Index entries
Data entries
direct search for
(Index File)(Data file)
Data Records
data entries
Data entries
Data Records
CLUSTERED UNCLUSTERED
18
Index Classification (Contd.) Dense index: contains (at least) one data entry for
every search key value that appears in a record in theindexed file Alternatives 1, 2, 3
Sparse index: contains one entry for each page ofrecords in the indexed file. Sparse index has to be clustered! Alternative 1? Alternative 2? Alternative 3?
19
Cost Model for Our Analysis
We ignore CPU costs, for simplicity: B: The number of data pages
R: Number of records per page
D: (Average) time to read or write disk page
I/O cost: Measuring # of page I/O’s ignores pre-fetchingof a sequence of pages; thus, approximate I/O cost.
Average-case analysis, based on simplistic assumptions.
Good enough to show the overall trends!
20
Comparing File Organizations
Heap files (random order; insert at eof) Sorted files, sorted on <age, sal> Clustered B+ tree file, Alternative (1),
search key <age, sal> Unclustered B + tree index on a heap file,
search key <age, sal> Unclustered hash index on a heap file,
search key <age, sal>
21
Operations to Compare
Scan: Fetch all records from disk Equality search: e.g. (age, sal) = (24, 50K)
Range selection:e.g. (age, sal) ∈ [(22, 20K), (30, 200K)]
Insert a record Delete a record
22
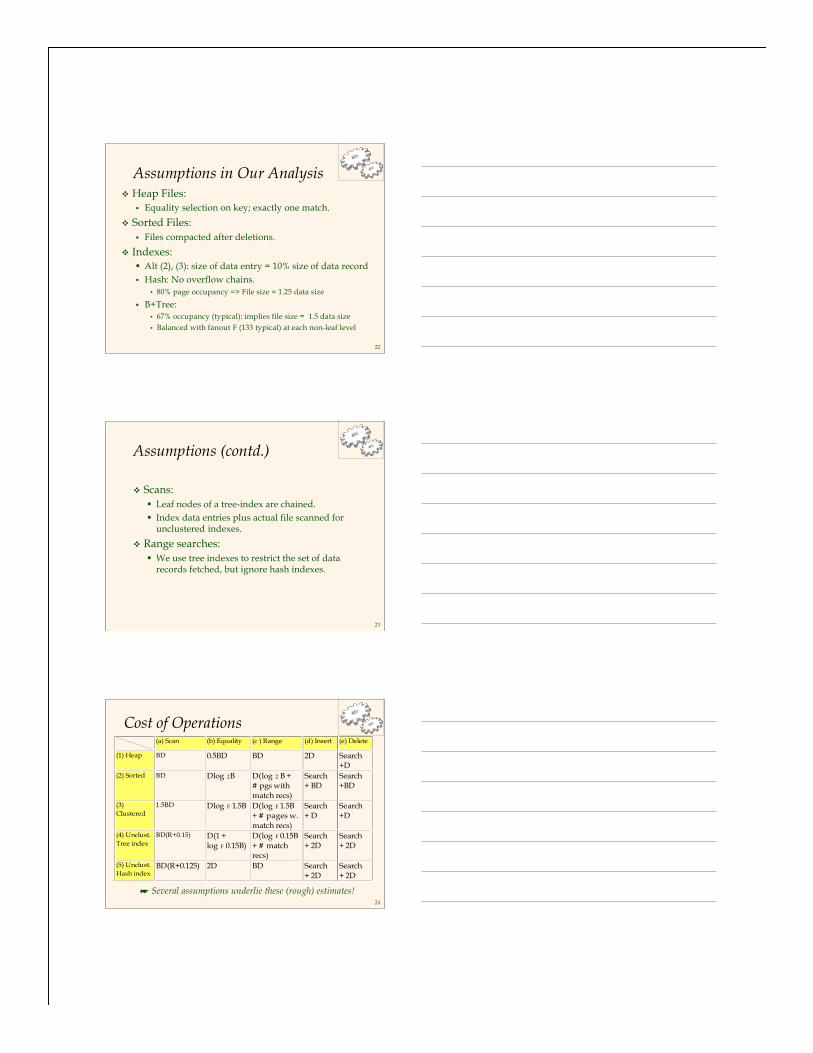
Assumptions in Our Analysis Heap Files:
Equality selection on key; exactly one match.
Sorted Files: Files compacted after deletions.
Indexes: Alt (2), (3): size of data entry = 10% size of data record Hash: No overflow chains.
• 80% page occupancy => File size = 1.25 data size
B+Tree:• 67% occupancy (typical): implies file size = 1.5 data size• Balanced with fanout F (133 typical) at each non-leaf level
23
Assumptions (contd.)
Scans: Leaf nodes of a tree-index are chained. Index data entries plus actual file scanned for
unclustered indexes.
Range searches: We use tree indexes to restrict the set of data
records fetched, but ignore hash indexes.
24
(a) Scan (b) Equality (c ) Range (d) Insert (e) Delete
(1) Heap BD 0.5BD BD 2D Search +D
(2) Sorted BD Dlog 2B D(log 2 B + # pgs with match recs)
Search + BD
Search +BD
(3)
Clustered
1.5BD Dlog F 1.5B D(log F 1.5B + # pages w. match recs)
Search + D
Search +D
(4) Unclust.
Tree index
BD(R+0.15) D(1 + log F 0.15B)
D(log F 0.15B + # match recs)
Search + 2D
Search + 2D
(5) Unclust.
Hash index BD(R+0.125) 2D BD Search
+ 2D Search + 2D
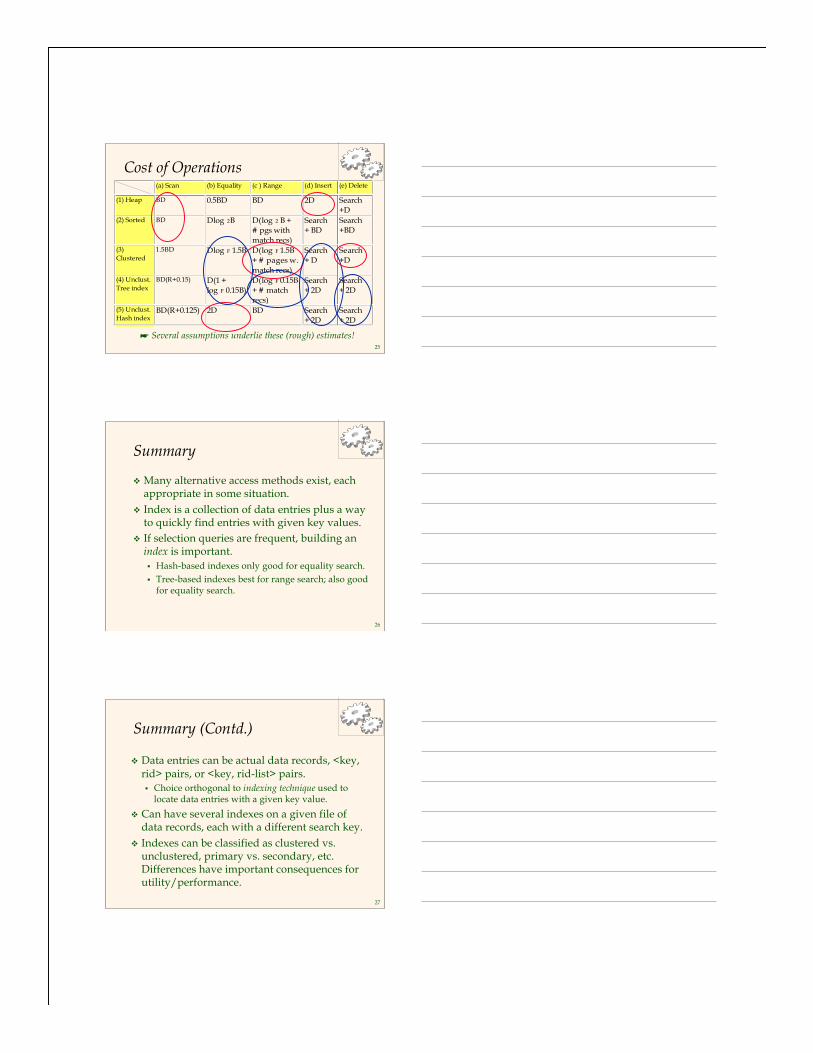
Cost of Operations
Several assumptions underlie these (rough) estimates!
25
(a) Scan (b) Equality (c ) Range (d) Insert (e) Delete
(1) Heap BD 0.5BD BD 2D Search +D
(2) Sorted BD Dlog 2B D(log 2 B + # pgs with match recs)
Search + BD
Search +BD
(3)
Clustered
1.5BD Dlog F 1.5B D(log F 1.5B + # pages w. match recs)
Search + D
Search +D
(4) Unclust.
Tree index
BD(R+0.15) D(1 + log F 0.15B)
D(log F 0.15B + # match recs)
Search + 2D
Search + 2D
(5) Unclust.
Hash index BD(R+0.125) 2D BD Search
+ 2D Search + 2D
Cost of Operations
Several assumptions underlie these (rough) estimates!
26
Summary
Many alternative access methods exist, eachappropriate in some situation.
Index is a collection of data entries plus a wayto quickly find entries with given key values.
If selection queries are frequent, building anindex is important. Hash-based indexes only good for equality search. Tree-based indexes best for range search; also good
for equality search.
27
Summary (Contd.)
Data entries can be actual data records, <key,rid> pairs, or <key, rid-list> pairs. Choice orthogonal to indexing technique used to
locate data entries with a given key value.
Can have several indexes on a given file ofdata records, each with a different search key.
Indexes can be classified as clustered vs.unclustered, primary vs. secondary, etc.Differences have important consequences forutility/performance.
28
Questions
Recommended

















