O metodě konečných prvkůLect_02.ppt
M. Okrouhlík
Ústav termomechaniky, AV ČR, PrahaPlzeň, 2010
Principle of virtual work, a few simple elements

Contents
• Governing equations of solid continuum mechanics• Fundamental ideas of finite element method (FEM)• Principle of virtual displacements and work• Discretization of displacements and strains• Energy balance• Equations of equilibrium, equations of motion• Lagrangian interpolation – Lagrangian elements – generalized coordinates• Bar, beam, triangle, quadrilateral, tetrahedron and brick elements• Derivation by hand and by means of Matlab• Hermitian elements• Conditions of completeness and compatibility and convergence

Governing equations of solid continuum mechanics
• Cauchy equations of motion
• Kinematic relations
• Constitutive relations
iij
jit
xfx
0000
0
j
kt
i
kt
i
jt
j
it
ij x
u
x
u
x
u
x
u00002
1angeGreen_Lagr
i
jt
j
it
ij x
u
x
u002
1eng
engengklijklij C Lagrange_Green
klijklij DS
3 equations
6 equations
6 equations

Solution of above 15 partial differential equations
• The mentioned system of partial differential equations could be analytically solved only for simple geometry and simple initial and boundary conditions.
• For a long time there were attempts to solve it numerically. Historically, it was the method of finite differences which was used at first.
• The solved area in space was covered by a regular mesh and the partial derivatives were replaced by a suitable difference formula at each node.
• This way the partial differential equation were replaced by ordinary differential equations.
• We say that the problem was discretized in space . • The resulting ordinary differential equations have
(usually) to be discretized in time to find a transient solution.

Today, approximate methods of solution prevail
• They are based on discretization in space and time and have numerous variants– Finite difference method– Transfer matrix method– Matrix methods– Finite element method
• Displacement formulation• Force formulation• Hybrid formulation
– Boundary element method– Meshless element method

Finite element method (FEM)
In FEM we "fill" the structure in question by a lot of small geometrically simple parts (elements) that are connected only by their corner points (nodes).

FEM
• For these elements we will derive their inertia and stiffness (damping) properties - in matrix form and will find a way how equilibrium conditions, boundary and initial conditions, and constitutive relations are satisfied.
• So instead of knowing the state of stress and strain at each material point (particle) we will find a solution in nodes only.

There are many ways how the FE theory could be presented.
The one, I like best, is based on the principle of virtual work.

Virtual displacements and work
Stejskal, V., Okrouhlík, M.: Kmitání s Matlabem, Vydavatelství ČVUT, 2002

Práce vnitřních sil
Práce objemových sil Práce povrchových sil
Práce osamělých sil


Zatím neznámý operátor
Posuvy v uzlech









Assembling – k tomu se ještě vrátíme

Lagrangian interpolation – Lagrangian elements

Tak a ještě jednou - stručně





… lagrangeovská
Později se též zmíníme o hermiteovské polynomialní aproximaci – kromě hodnot funkce v uzlech uvažujeme navíc i hodnoty derivací v uzlech
Do hry vstupují pouze hodnoty funkce v uzlech


Lagrangian elementsMethods of generalized coordinates
Later, we will explain another approach, namelyIsoparametric elements




(konsistentní)
Say a few words about the diagonal mass matrix

1D Hermitian element



For more details see: Okrouhlík, M.: Aplikovaná mechanika kontinua II, Ediční středisko ČVUT, Praha, 1989.

Summary for 1D elements
• L1 … lagrangian, linear approximation function• L2 … lagrangian, quadratic• L3 … lagrangian, cubic
• H3 … hermitian, cubic approximation function• H5 … hermitian, quintic
See: Okrouhlík, M. – Hoeschl, C.: A contribution to the study of dispersive properties of 1D and 3D Lagrangian and Hermitian elements, Computers and structures, Vol. 49, pp. 779 – 795, 1993

C stands for consistent mass matrix


How does dispersion for L1C and L1D elements depend on the mass matrix formulation
The subject will be treated in more detail later. See dp_part_1.ppt

Say a few words about alternative numbering

Linear displacement distribution …
… constant strain element …
… discontinuity at element boundaries




4-node plane elementwith bilinear displacement approximation



% symb_q4_mk% odvod matici hmotnosti a tuhosti obdelnikoveho prvku% pro rovinnou napjatost% a,b rozmery prvku (obdelnik)% h tloustka% ro hustota% mi Poissonovo cislo% E Younguv modul pruznosticlear; format compactsyms fi x y s a b u h ro F B C mi Bt E p q; % deklarace symbolickych promennychfi = [1 x y x*y]; % aproximacni polynomzero = [0 0 0 0];u = [fi zero; zero fi]; % matice aproximacnich funkciS = [1 0 0 0 0 0 0 0; ... % matice S 1 a 0 0 0 0 0 0; ... 1 a b a*b 0 0 0 0; ... 1 0 b 0 0 0 0 0; ... 0 0 0 0 1 0 0 0; ... 0 0 0 0 1 a 0 0; ... 0 0 0 0 1 a b a*b; ... 0 0 0 0 1 0 b 0];

sinv = inv(S); % inverze matice Saa = u*sinv; % matice tvarovych funkci Aaat = aa.'; % realna transpozice matice Aata = aat*aa; % integrand bez konstantm1=int(ata,'y'); % integrace podle ymu=subs(m1,'y','b'); ml=subs(m1,'y','0'); % dosad mezem2 = mu-ml; % odectim3=int(m2,'x'); % integrace podle xmu=subs(m3,'x','a'); ml=subs(m3,'x','0'); % dosad mezem4 = mu - ml; % odectim4 = ro*h*m4; % vynasob konstantamiconst = 36/(a*b*h*ro); % toto se da vytknoutdisp('matice hmotnosti - je vynechana nasobna konstanta a*b*h*ro/36')m4 = const*m4

% odvod matici tuhosti% derivace aproximacnich funkcidfix = diff(fi,x);dfiy = diff(fi,y);% vytvor matici FF = [dfix zero; ... zero dfiy; ... dfiy dfix];% vytvor matici BB = F*sinv;% transpozice BBt = B.';% matice elastickych cinitelu pro rovinnou napjatost% s vynechanou nasobnou konstantou ... constkconstk = E*h/(1-mi*mi);C = [1 mi 0; ... mi 1 0; ... 0 0 (1-mi)/2];

% integrand matice tuhostibtcb = Bt*C*B;% integrace vzhledem k x a y na obdelniku a,b% tloustka prvku h je konstantnik1 = int(btcb,'y'); % integrace podle yku = subs(k1,'y','b'); kl = subs(k1,'y','0'); % dosad mezek2 = ku - kl; % odectik3 = int(k2,'x'); % integrace podle xku = subs(k3,'x','a'); kl = subs(k3,'x','0'); % dosad mezek = ku - kl;k = constk*k;k = subs(k, {'a/b', 'b/a'}, {'p', 'q'});k = subs(k, {'1/3/b*a', '1/6/a*b'}, {'p/3', 'q/6'});k = subs(k, {'1/6/b*a', '1/6/a*b'}, {'p/6', 'q/6'});constk = (1-mi^2)/(E*h);k = constk*k;simplify(k);k = -24*k;k = simplify(k);
Význam parametrů p a q

disp(' ')disp('matice tuhosti')disp('je vynechana nasobna konstanta E*h/(24*(mi^2 - 1))')disp('prvni cast k(1:8,1:4)')disp(k(1:8,1:4))disp('druha cast k(1:8,5:8)')disp(k(1:8,5:8))% end of symb_q4_mk
>> Symb_q4_mkmatice hmotnosti - je vynechana nasobna konstanta a*b*h*ro/36m4 =[ 4, 2, 1, 2, 0, 0, 0, 0][ 2, 4, 2, 1, 0, 0, 0, 0][ 1, 2, 4, 2, 0, 0, 0, 0][ 2, 1, 2, 4, 0, 0, 0, 0][ 0, 0, 0, 0, 4, 2, 1, 2][ 0, 0, 0, 0, 2, 4, 2, 1][ 0, 0, 0, 0, 1, 2, 4, 2][ 0, 0, 0, 0, 2, 1, 2, 4]

matice tuhostije vynechana nasobna konstanta E*h/(24*(mi^2 - 1))prvni cast k(1:8,1:4)[ -8*q-4*p+4*p*mi, 8*q-2*p+2*p*mi, 4*q+2*p-2*p*mi, -4*q+4*p-4*p*mi][ 8*q-2*p+2*p*mi, -8*q-4*p+4*p*mi, -4*q+4*p-4*p*mi, 4*q+2*p-2*p*mi][ 4*q+2*p-2*p*mi, -4*q+4*p-4*p*mi, -8*q-4*p+4*p*mi, 8*q-2*p+2*p*mi][ -4*q+4*p-4*p*mi, 4*q+2*p-2*p*mi, 8*q-2*p+2*p*mi, -8*q-4*p+4*p*mi][ -3*mi-3, 9*mi-3, 3*mi+3, -9*mi+3][ -9*mi+3, 3*mi+3, 9*mi-3, -3*mi-3][ 3*mi+3, -9*mi+3, -3*mi-3, 9*mi-3][ 9*mi-3, -3*mi-3, -9*mi+3, 3*mi+3]
druha cast k(1:8,5:8)[ -3*mi-3, -9*mi+3, 3*mi+3, 9*mi-3][ 9*mi-3, 3*mi+3, -9*mi+3, -3*mi-3][ 3*mi+3, 9*mi-3, -3*mi-3, -9*mi+3][ -9*mi+3, -3*mi-3, 9*mi-3, 3*mi+3][ -8*p-4*q+4*q*mi, -4*p+4*q-4*q*mi, 4*p+2*q-2*q*mi, 8*p-2*q+2*q*mi][ -4*p+4*q-4*q*mi, -8*p-4*q+4*q*mi, 8*p-2*q+2*q*mi, 4*p+2*q-2*q*mi][ 4*p+2*q-2*q*mi, 8*p-2*q+2*q*mi, -8*p-4*q+4*q*mi, -4*p+4*q-4*q*mi][ 8*p-2*q+2*q*mi, 4*p+2*q-2*q*mi, -4*p+4*q-4*q*mi, -8*p-4*q+4*q*mi]

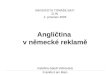
Displacements and strains of a four-node bilinear element
0
0.05
0.1
0
0.05
0.11
1.5
2
2.5
3
displacements ux
0
0.05
0.1
0
0.05
0.11
2
3
4
displacements uy
0
0.05
0.1 0
0.05
0.1-60
-40
-20
0
20
strains ex
0
0.05
0.1 0
0.05
0.110
15
20
25
30
strains ey
0
0.05
0.1 0
0.05
0.1-50
0
50
strains exy

Displacements and strains of a four-node bilinear element


Krychlový lagrangeovský, izoparametrický prveks vlastnostmi kubické anizotropie
For more details see lacu_opraven.doc

Krychlový lagrangeovský, izoparametrický prveks vlastnostmi kubické anizotropie
Jde o izoparametrický lagrangeovský prvek, tedy interpolace souřadnic i posuvů je vyjádřena stejnými aproximačními funkcemi. Neznámými veličinami v uzlech jsou pouze hodnoty posuvů. V každém uzlu krychle jsou 3 neznámé posuvy, prvek jako celek má tedy 3 x 8 = 24 neznámých posuvů či stupňů volnosti. Aproximační funkce v jsou ve všech směrech stejného typu a volíme je ve tvaru neúplného polynomu třetího stupně s osmi neznámými konstantami tak, aby vynechané členy nevnášely do zvolené aproximace nežádoucí anizotropii.

Krychlový lagrangeovský, izoparametrický prveks vlastnostmi kubické anizotropie
Aproximační funkci jsme volili ve tvaru T r s t rs st tr rst 1 .
Interpolace souřadnic pak vychází
cUx
Tts,r,zts,r,yts,r,xx
T241716981T
zyx cccccc cccc
U
T
T
T
0 0
0 0
0 0

Obdélníkový hermiteovský subprametrický prvekÚT ČSAV, Z968/85

Obdélníkový hermiteovský subprametrický prvek
For more details see Z968_85_clanky.pdf


Summary


Recommended