
NEXT-GENERATION ACOUSTIC WIND PROFILERS
Stuart Bradley1,2
Sabine Von Hünerbein2
1Physics Department, University of Auckland, New Zealand2Acoustics Research Centre, University of Salford, UK.

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
The Two Existing Technologies
LIDAR• Scatters light from natural
particles
• Lowest height 40m• Highest reading 150m• Averaging time 10 min• Cost €150 k • Maintenance: currently
high, longer term unknown
SODAR• Scatters sound from
turbulent temperature variations
• Lowest height 10m• Highest reading 1000m• Averaging time 10 min• Cost €35 k• Maintenance: currently
low and well-established
THE UNIVERSITY OF AUCKLANDNEW ZEALAND
A careful, unbiased field trial
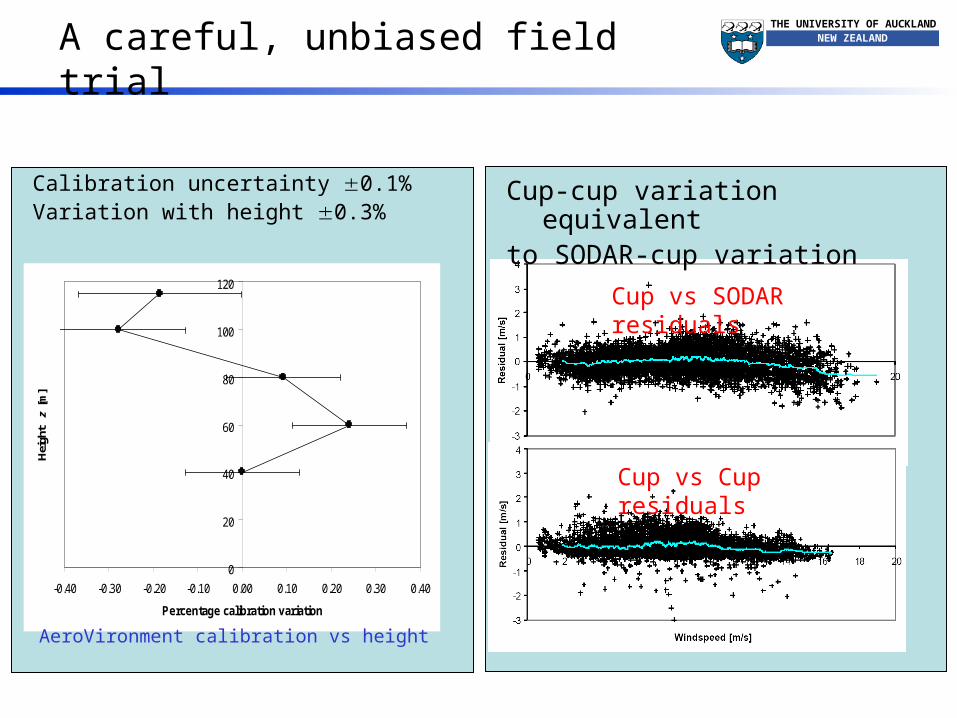
Calibration uncertainty 0.1%Variation with height 0.3%
0
20
40
60
80
100
120
-0.40 -0.30 -0.20 -0.10 0.00 0.10 0.20 0.30 0.40
Percentage calibration variation
Hei
ght z
[m]
AeroVironment calibration vs height
Cup vs SODAR residuals
Cup vs Cup residuals
Cup-cup variation equivalentto SODAR-cup variation

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
LIDAR vs SODAR Performance?
0
20
40
60
120
140
-5 -4 -3 -2 -1 0 1
Slope Error [%]
Height [m]
SODAR(Bradley)
ZephIR (Albers)
ZephIR (Kindler)
ZephIR(Courtney)
ZephIR(Mikkelsen)
Difficult to find independent comparisons which compare LIDARs and SODARs under similar conditions !

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
Are Comparisons Reliable?
• Many comparisons and field tests are done by companies or institutions which have major financial commitments (ownership of instruments, dependency on grants, development contracts, etc), particularly with the more expensive LIDARs. This can mean they concentrate on the product which has the greatest financial impact on them
• Many comparisons and field tests do not give enough statistical information to allow solid judgement to be made
THE UNIVERSITY OF AUCKLANDNEW ZEALAND
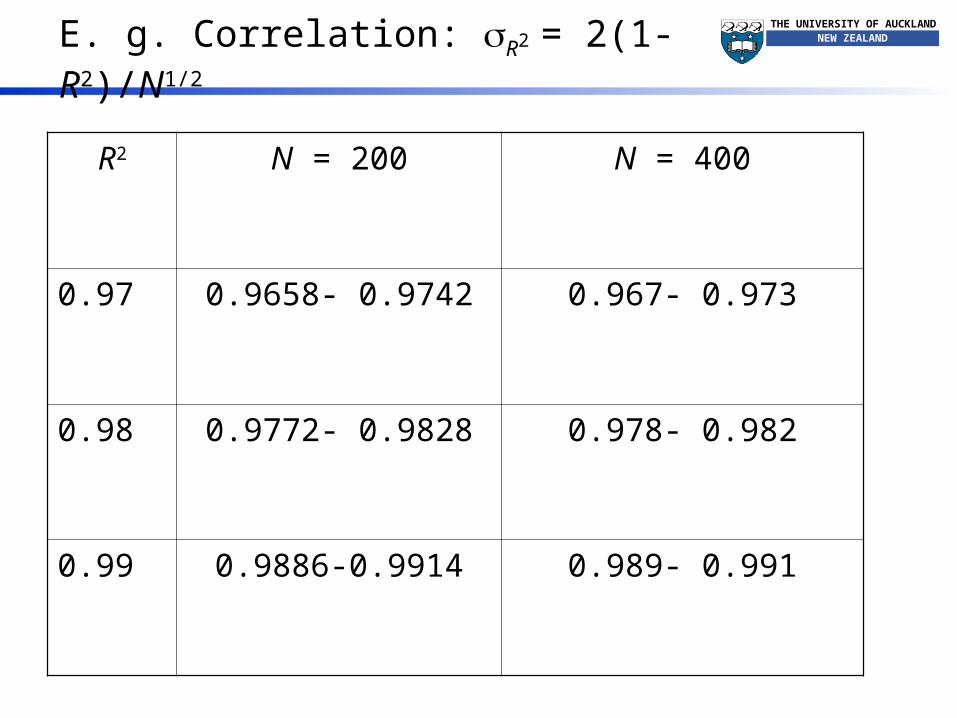
E. g. Correlation: R2 = 2(1- R2)/N1/2
R2 N = 200 N = 400
0.97 0.9658- 0.9742 0.967- 0.973
0.98 0.9772- 0.9828 0.978- 0.982
0.99 0.9886-0.9914 0.989- 0.991

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
E. g. Typical remote vs mast output
Really important• Fit a straight line through the origin (why expect non-zero remote
wind when actual wind speed is zero ?) • Number of data points N (affects uncertainties)• Averaging time• Height
0 5 10 15 200
5
10
15
20
Mast wind speed [m/s], Height=80 m
SO
DA
R w
ind
sp
ee
d [m
/s]
N=358, Average 600 s, Slope =1.05+/- 0.02, r2=0.9866+/-0.001
THE UNIVERSITY OF AUCKLANDNEW ZEALAND
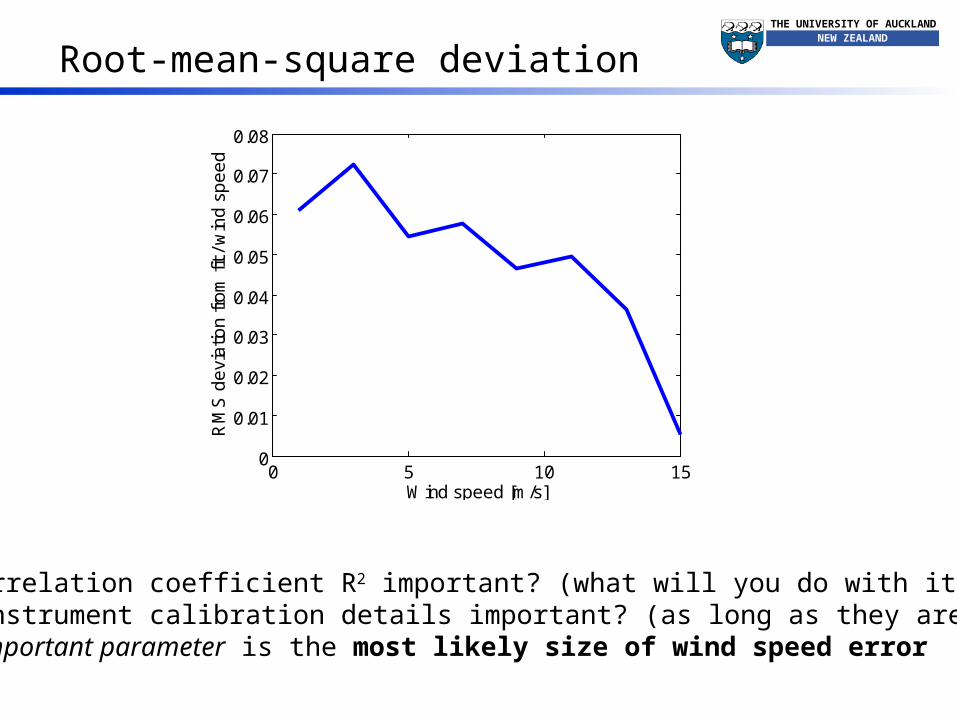
Root-mean-square deviation
0 5 10 150
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
Wind speed [m/s]
RM
S d
evi
atio
n fr
om
fit /
win
d s
pe
ed
• Is correlation coefficient R2 important? (what will you do with it?)• Are instrument calibration details important? (as long as they are stable)• The important parameter is the most likely size of wind speed error

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
What does the extra €110k buy you ?
A LIDAR has• A smaller (but heavier) box• Quiet operation (but with turbine noise and distance from
housing, who cares?)• Marginal increase in R2 (perhaps)• Marginally improved accuracy of wind speed ??• Increased maintenance costs (probably)• Decreased performance in rain and fog• Higher power consumption• No data below 40m or above 150m• Large height steps (poor vertical resolution)

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
History and What is Next
• Big advance in SODARs in 1980s with multi-speaker/microphone phased-array technology
• Big advance in LIDARs in 2000s with fibre-based lasers: directly impacting on wind energy
• SODAR developers are only now responding to the impact of LIDARs in wind energy: expectation from new, intense, R&D is another “technology leap”

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
SNODAR
• 1m resolution• Autonomous operation through Antarctic winter
THE UNIVERSITY OF AUCKLANDNEW ZEALAND
SONDE
• Long (several seconds) FM-CW acoustic pulses
• Huge increase in signal strength (30 dB)
• Wind speed estimates every few meters, and every few seconds
• Some remaining technological challenges
• Current work on real-time tracking of aircraft wing-tip vortices (during landing and take-off)

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
New Acoustic Wind Profilers
Triton• Similar acoustic design to
long-established ASC (AeroVironment) and ART SODARs
• Solar powered
AQ500• Innovative acoustic
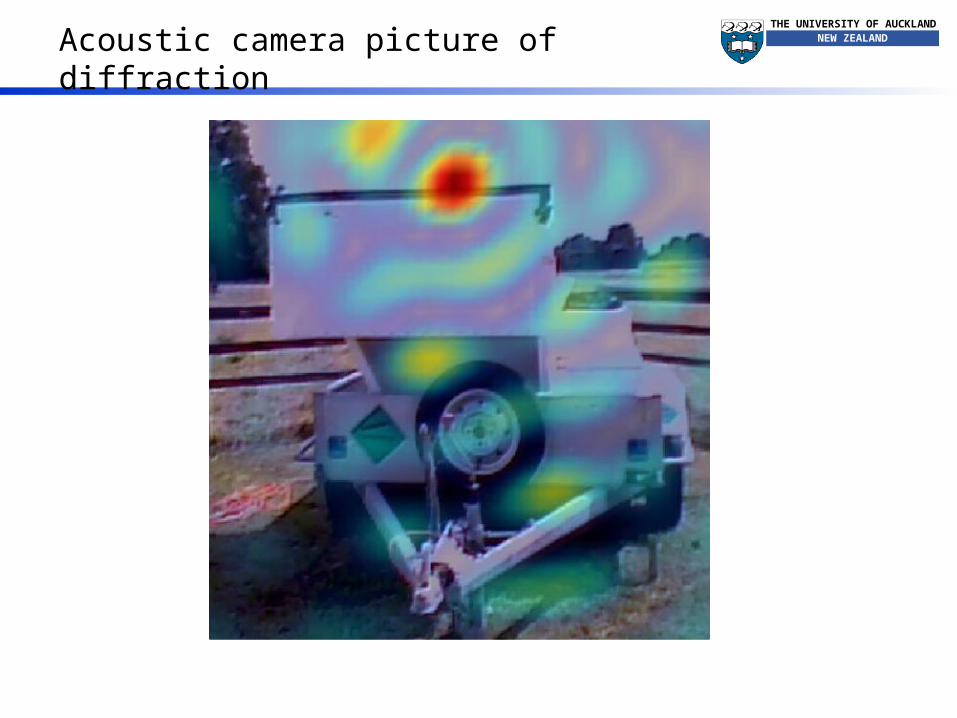
design (3 dishes, 3 tilted beams, small footprint, reduced diffraction)
• Generally needs additional baffles

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
Data availability (example from an AQ500)
0 20 40 60 80 100
20
35
50
65
80
95
110
125
140H
eig
ht m
Data availability %
THE UNIVERSITY OF AUCKLANDNEW ZEALAND
Where will Improvements be Made?
For SODARs:• Clutter (ability to operate near masts etc, quieter)
• Smart signals (to give shorter averaging times, lower rms errors)
• Lower power
• Compact (smaller footprint)
• Better operation in rain
THE UNIVERSITY OF AUCKLANDNEW ZEALAND
Acoustic camera picture of diffraction

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
Beam design
Plot of measured and modelled correlation between winds measured by different beam combinations on the same 5-beam SODAR
At 60m, the time taken for air to travel from one beam to another (at the wind speed during these measurements) is equal to the time between acoustic pulses
The shape of this curve is a measure of the spatial correlation for wind
020406080
100120140160180200
0.60 0.70 0.80 0.90
R2
Hei
ght [
m]

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
Bistatic SODARs
• Useful to separate transmitter and receiver (‘bistatic’) so that turbulent velocity fluctuations are also measured
• The ‘break-even’ angle is about 11: this would require separating the transmitter and receiver by about 20m
10
20
30
40
30
210
60
240
90
270
120
300
150
330
180 0
Power dB.Blue=velocity fluctuations,Red=temperature fluctuations

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
“Piccolo” Bi-Static + Smart signals
• Continuous cycle step-chirp• Unfortunately, the direct signal saturated all channels so all useful
data is lost during those periods (it needs acoustic baffles)• However, beam-forming for z = 32m, picks up the gaps at 0.3s,
0.4s, …,0.9s. Adding resulting power spectra gives 8 dB improvement for SNR of the 3000 Hz signal. This is a very useful increase!
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.5
0
0.5
Time [s]
Am
plit
ud
e 3000Hz 3150Hz 3300Hz 3450Hz 3600Hz 3750Hz 3900Hz 4050Hz 4200Hz 4350Hz
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-10
0
10
Time [s]
Am
plitu
de
[V
]
Transmitted
Received

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
The Next-Generation SODARs
• Will look different (smaller, new acoustic design)
• Will be quiet, except when alongside
• Will sound different (smart signals)
• Will be solar-powered
• Will clearly surpass current LIDAR performance

THE UNIVERSITY OF AUCKLANDNEW ZEALAND
Summary
• Next-generation SODARs, with very superior performance will emerge in the next 2-3 years
• The design challenges are not extreme
• In an increasingly recession and risk-averse financial environment, the business case for SODARs is strong
Recommended

















