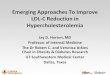
MODEL ORDER REDUCTION

Need for model order reduction (MOR)
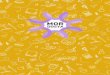
Methodology for MOR
Classical approaches
Supercapacitor
Data driven approaches
Design of experiment
Linear approach: Batteries
Nonlinear SISO / MISO approach: Power converter
Nonlinear MIMO approach: Fuel cell
Summary of findings
OUTLINE

• MOR is required to reduce computational complexity of model yet retain
sufficient accuracy for a specific purpose, i.e. control, diagnosis, prognosis
Model order reduction procedure to obtain banks of linear models
MODEL ORDER REDUCTION OVERVIEW

Models for purpose:
Control
Diagnosis
Prognosis
Approaches for MOR:
Classical
Based on mathematical
manipulation of system equations
Data-driven
Models derived from data collected from complex models or hardware
Include System Identification and Machine Learning methods
All approaches retain dominant modes whilst discarding modes with
low contribution to system dynamics
METHODOLOGY
classical
data-driven
METHODOLOGY
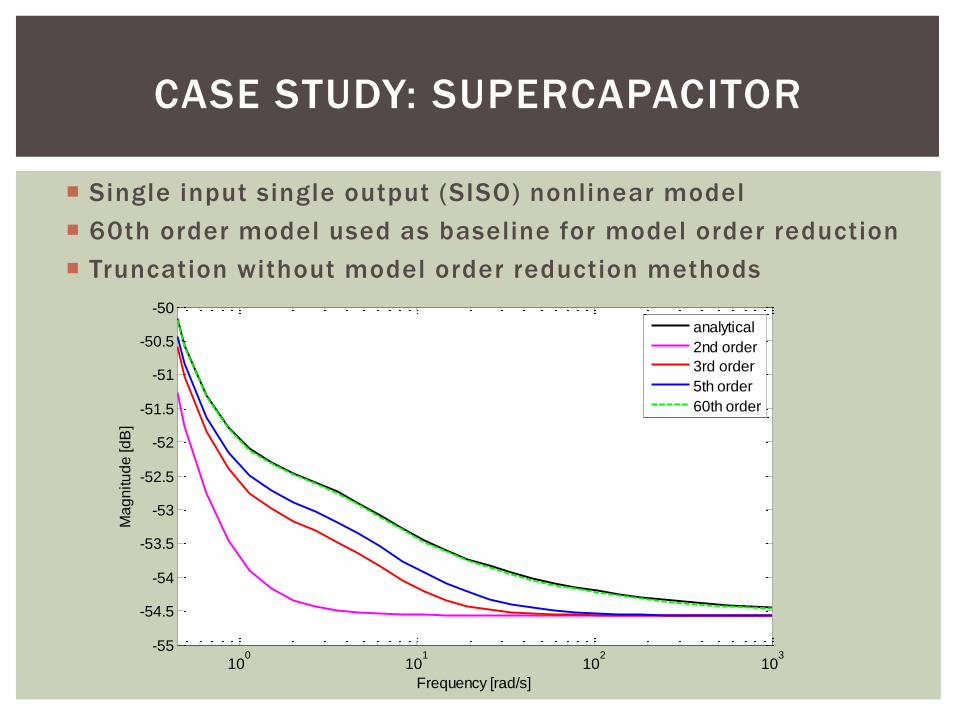
Single input single output (SISO) nonlinear model
60th order model used as baseline for model order reduction
Truncation without model order reduction methods
100
101
102
103
-55
-54.5
-54
-53.5
-53
-52.5
-52
-51.5
-51
-50.5
-50
Frequency [rad/s]
Ma
gn
itu
de
[d
B]
analytical
2nd order
3rd order
5th order
60th order
CASE STUDY: SUPERCAPACITOR

Comparison of 3 rd order model variants
obtained via selected reduced order
modelling techniques
100
101
102
103
-55
-54.5
-54
-53.5
-53
-52.5
-52
-51.5
-51
-50.5
-50
Frequency [rad/s]
Ma
gn
itu
de
[d
B]
system
SPA
TBR
Arnoldi
3rd order
100
101
102
103
-55
-54.5
-54
-53.5
-53
-52.5
-52
-51.5
-51
-50.5
-50
Frequency [rad/s]
Ma
gn
itu
de
[d
B]
system
SPA
TBR
Arnoldi
3rd order
RIV
CASE STUDY: SUPERCAPACITOR
0 2 4 6 8 100
1
2
3
4
5x 10
-4Hankel Singular Values (State Contributions)
State
Sta
te E
ne
rgy
Stable modes
SPA – Singular perturbation
approximation
TBR – Truncated balanced
residualisation
Arnoldi – Krylov subspace
method
RIV – refined instrumental
variable

DATA DRIVEN APPROACHES
An experimental process, whereby
making use of available input -output
data and a priori knowledge, one aims
to mathematically describe causalities
that govern behaviour of system
Different approaches to modelling
based on a priori knowledge
White box
Black box
Grey box
1. Data acquisition
Voltage and SOC (outputs) responses to current input
36 short (80 seconds) data sets starting at different SOC
(positive current input – charge mode)
Experiment repeated for negative current (discharging)
2. Obtained set of 144 LTI models using simplified refined
instrumental variable (SRIVC) method
Current to SOC models
Current to voltage models
3. Assumption: low order model can have linear structure,
where parameters depend on SOC and sign of current
CASE STUDY: BATTERY
CASE STUDY: BATTERY
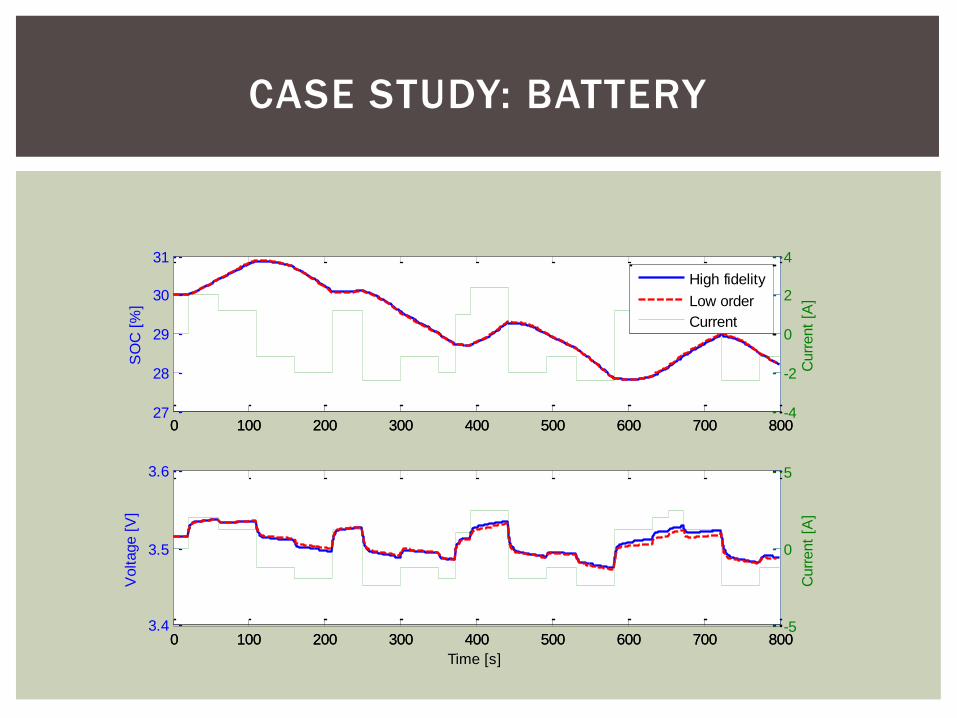
0 100 200 300 400 500 600 700 80027
28
29
30
31
SO
C [
%]
0 100 200 300 400 500 600 700 800-4
-2
0
2
4
Curr
ent
[A]
0 100 200 300 400 500 600 700 8003.4
3.5
3.6
Voltage [
V]
Time [s]
0 100 200 300 400 500 600 700 800-5
0
5
Curr
ent
[A]
High fidelity
Low order
Current

Model structure : 10 single input - s ingle output (SISO)
Hammerstein models with 4 th order polynomial
static nonlinearity
Inputs: Input voltage and duty cycle
Output: Output current
Model order: 1
RT2= 99.83 %
CASE STUDY: BUCK-BOOST CONVERTER
0.5 1 1.5 2 2.5 3 3.5 4
-2
-1.5
-1
-0.5
outp
ut
Actual
Identified
0.5 1 1.5 2 2.5 3 3.5 4
-2
-1.5
-1
-0.5
outp
ut
Actual
Identified
0.5 1 1.5 2 2.5 3 3.5 4
8
10
12
14
time
inputs
duty ratio
Vin

CASE STUDY: BUCK-BOOST CONVERTER
Model structure : Bil inear multiple inputs – s ingle output (MISO)
Inputs: Input voltage and duty cycle
Output: Output current
Model order: 5
RT2= 93.7 %
a – 5
b – 2
Bilinear term – 1
0 0.5 1 1.5 2 2.5 3 3.5 4-2.5
-2
-1.5
-1
-0.5
0
Time [Sec]
True output
Identification data
Validation data

CASE STUDY: FUEL CELL STACK
J. Pukrushpan, A. Stefanopoulou, and H. Peng, “Control of fuel cell breathing,” IEEE
Contr. Syst. Mag., vol. 24, no. 2, pp. 30–46, Apr. 2004.
Model s tructure : MIMO NARX
Inputs: stack current, compressor
voltage
Outputs: stack voltage, oxygen
excess, net power
Logarithmic type nonlinearity on
the input
Model order: 15
Oxygen excess RT2= 96.8 %
Stack voltage RT2 =94.2 %
Net power RT2 =99.3 %
10 15 20 25
1.4
1.6
1.8
2
2.2
Time [Sec]
Oxyg
en
exce
ss
True output
Identification data
Validation data
10 15 20 25
3
4
5
6
x 104
Time [Sec]
Ne
t p
ow
er
True output
Identification data
Validation data
10 15 20 25 30
200
220
240
260
Time [Sec]
Sta
ck v
olta
ge
True output
Identification data
Validation data
MOR effectively retains fidelity of high order model whilst
reducing the model order
Data driven approaches are effective for reduced order
modelling
Purpose of model and a priori information determines the
modelling method
Outline of methodology for model order reduction
Control
Diagnosis
Prognosis
Guidelines for MOR
Methodology is robust for multiple case studies
SUMMARY OF FINDINGS
Recommended







![MODEL ORDER REDUCTION - ScilabDOC]Scilab... · 2019-12-05 · Scilab Model Reduction Toolbox – User Guide Page 2 of 35 Introduction Model Order Reduction (MOR) is a technique for](https://img.pdfslide.us/doc/110x75/5e9416b1901cd30dca3e98bb/model-order-reduction-scilab-2019-12-05-scilab-model-reduction-toolbox-a-user.jpg)