Miniature Robotic Drilling Rig for
Research, Technology Development
and EducationStudents:
Astrid Lescoeur, Martin Olsen, Mayuran Vasantharajan
and Runa Linn Egeland
Supervisors:
Sigve Hovda and Alexey Pavlov
Affiliation:
Department of Geoscience and Petroleum
Norwegian University of Science and Technology

The Team
STUDENTS
• Astrid Lescoeur
• Martin Olsen
• Mayuran Vasantharajan
• Runa Linn Egeland
SUPERVISORS
• Alexey Pavlov, Professor
• Tor Berge Gjersvik, Professor
• John-Morten Godhavn, Professor
• Sigve Hovda, Professor
• Noralf Vedvik, Technical Support
(mechanical)
• Steffen W. Moen, Technical Support
(electrical)

OBJECTIVE
«Design a drilling rig and
related equipment to
autonomously drill a vertical
well as quickly as possible
while maintaining borehole
quality and integrity of the
drilling rig and drillstring»

Work Process
Fall 2016
• Design of the drilling rig
• Finding sponsors
• Report and application for the
competition
Spring 2017
• Building the drilling machine
• Automation design
• Software development
• Testing the drilling machine
• Participating in the competition

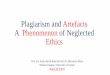
What does it look like?

Hardware Limitations
• Drillstring is made of aluminum with
OD=0.625’’ and ID=0.305’’
• Maximum combined length of stabilizers is
8.9 cm
• Riser is limited to 10 cm
• Conclusion: vibrations will be a major issue that can be
adressed by the control system and the structural design

Hardware Components
HOISTING SYSTEM
• Ball screw driven by an AC-
motor with linear roller guides
• Provides vertical movement
and weight on bit
TOP DRIVE SYSTEM
• Provides rotational force to the
drill string
• Electrical swivel to avoid
twirling sensor cables

c
Hardware Components
CIRCULATION SYSTEM
• Piston pump provides circulation, cuttings
transportation and desired pressures
• Swivel designed to withstand pressures up
to 50 bar

Hardware Components
STABILIZING ELEMENTS AT
SURFACE
• Drill deck bushing
• Riser at formation top and
landing module

Hardware ComponentsSENSORS
• Downhole Sensors:
Temperature
• Surface Sensors:
Load cell and pressure transducer
• Integrated Drive Sensors:
• Hoisting system: position and torque
• Top drive system: RPM and torque
c

Hardware ComponentsMOBILITY
• Foldable rig
• Structure dimensions
• Casters with foot-activated
lift- mechanism
VERSATILITY
• Can tolerate rock sample
height up to 85cm and width
and length up to 60cm
• Adjustable top drive motor
position

Safety SystemHARDWARE
• Emergency shutdown of the system
– Manual stop button cuts the power supply
to the motors and pump
• Hoisting system
– Limit switch added to each of the
extremities to avoid running off the rails
• Electrical system:
– All electrical components stored inside
waterproof cabinet to avoid shorting and
electrical hazards

Safety SystemHARDWARE
• Safety related to drill pipe failure:
– Plexiglass set up around the rig structure, isolating drilling
zone from personnel and avoiding water spillage
CONTROL SYSTEM
• Safety limits are implemented in the drives to avoid failure
and hazardous situations
• The safety limits have the highest priority in the control system

Key Areas of DesignGEOMETRICAL STIFFNESS
OF THE DRILL PIPE
• Nozzle was added in the
BHA
• This increases the internal
pressure which increases the
tension in the pipe wall
• Differential pressure of 46.9
bar over the constriction
220.5 N acting downwards

Key Areas of DesignCONTROL SYSTEM
• Control inputs:
– Hoisting speed
– Top drive speed
• Measured parameters:
– WOB
– Torque (hoisting)
– Torque (drill string)
– RPM (drill string)
– Downhole:
• Temperature
• Bit position
– ROP (from position)
– MSE
Simulink

Design
Criteria
PRIORITIES
1. Integrity of the rig
2. Borehole quality
3. ROP maximization
4. Energy efficiency
5. Keep it simple – fit for purpose

Pre-Study
ASPHALT MARBLE SLATE SOAPSTONE
• Multiple experiments carried out on various rocks

Key Findings

AT RPM = 1000
• Higher WOB provides higher ROP and the same, or higher efficiency (from MSE calculations)
• Comment: RPM = 1000 for all plots below
Key Findings


Key FindingsOPTIMIZATION STRATEGY
• Push system to the limits by increasing WOB
WEAKEST LINK OF THE DESIGN
• Connection between BHA and drill string
• Excessive drill string torques and torque peaks
Max drill string torque limit set to 4 Nm in the control system drive
• Control drill string torque to a set-point below safety limit (2.4 Nm is chosen) to avoid excessive peaking of drill string torque.
• Torque is controlled through WOB (increasing/decreasing)

Design
Criteria
PRIORITIES
1. Integrity of the rig
2. Borehole quality
3. ROP maximization
4. Energy efficiency
5. Keep it simple – fit for purpose

Strategy
1. Drill down at safe values (400 RPM) before the
surface stabilizing element is in place
2. Set RPM = 1000
Control Tds to a set-point

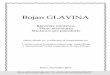
Key Areas of DesignCONTROL SYSTEM
• Hoisting system
– Hoisting motor in speed control mode with max torque limit
– Controllers implemented in Simulink: WOB control mode and
Drillstring Torque control mode
– Nonlinear gains ensure fast reduction of the WOB if the
Drillstring Torque peaks over the set-point Tds
sp
TdsM
(Top Drive)
Non-linear
gain
PID
WOB M
(Load Cell)
Non-linear
gain
PID
⍵hSPWOBsp

Key Areas of DesignCONTROL SYSTEM
• Top drive
– Top drive motor is in speed control mode with max torque
safety limit
• Necessary filtering is applied to signals to avoid noise issues

Test DayROCK FORMATION
• Dimensions of box: 153x305x610 mm
• Unknown rock formations
SET-UP
• A one inch pilot hole was manually drilled the day before
• Top drive and hoisting motor were running autonomously
• Water based circulation system was run manually (not pressurized)
• Baker Hughes drill bit was used
• BHA was manufactured in the workshop

Test DayRESULTS
• Two twist-offs occurred due to weight imbalance between the BHA and the pipe
• The rock was drilled through in approximately 1 hour

Lessons LearnedMECHANICAL
• The structure was designed assuming that the aluminum pipe
as the weakest link. Testing phase showed that the BHA/pipe
connection was the weakest link.
• Critical resonances were in the design phase only studied for
the drill pipe, not for the whole structure
• Bit bouncing was not expected through literature study in
design phase, but showed up being a severe bottleneck

CONTROL SYSTEM/SIGNALS
• Discovered the importance of tuning PID-controllers, filtering
signals and setting proper safety limits
• The control system was designed from zero control system
experience. If we look back, we would probably do things
differently
GENERAL
• Teamwork and communication is critical to enhance productivity
and efficiency
• The importance of project and time management when bringing
a project from design to final product
• Hands-on experience: areas of learning gained through the
competition not covered in the university course material
• Insight into other engineering disciplines

QUESTIONS?
Recommended