Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Hap
tic E
nhan
cem
ent o
f Ope
rato
r C
apab
ilitie
s in
Hyd
raul
ic
Equi
pmen
t
Mat
thew
Kon
tz
Adv
isor
: Way
ne B
ook

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Hap
tics
Hap
tic (a
dj.):
Of o
r rel
atin
g to
the
sens
e of
touc
h;
tact
ileH
aptic
robo
tics o
r Hap
tics:
usi
ng a
robo
t to
ar
tific
ially
pro
duce
tact
ile se
nsat
ions
such
as
text
ure,
or s
tiffn
ess
Oth
er e
xam
ples
: mas
s, vi
scou
s dam
per,
sprin
gH
aptic
s can
be
used
to in
terf
ace
with
a p
urel
y vi
rtual
wor
ld (v
irtua
l rea
lity)
Hap
tics c
an a
lso
man
ipul
ate
a re
mot
e de
vice

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Hyd
raul
ics
Hyd
raul
ics:
usi
ng fl
uid
pres
sure
and
flo
w to
supp
ly m
echa
nica
l wor
kH
ydra
ulic
s act
uatio
n is
fast
, stif
f an
d ha
s a h
igh
pow
er to
mas
s rat
ioH
igh
forc
e to
spee
d ra
tioH
ydra
ulic
s are
wid
ely
used
in
indu
stry
and
hea
vy m
achi
nery

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Mot
ivat
ion
Trad
ition
al h
eavy
equ
ipm
ent i
s con
trolle
d by
man
ual v
alve
sEl
ectro
hydr
aulic
val
ves n
ow a
llow
flex
ible
el
ectro
nic
cont
rol o
f flu
id p
ower
syst
ems
Hap
tic fe
edba
ck is
a w
ay to
enh
ance
op
erat
or c
ontro
l of h
ydra
ulic
dev
ices

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Bac
kgro
und
Res
earc
h ha
s bee
n do
ne w
ith h
aptic
con
trol
of h
ydra
ulic
robo
ts a
nd e
xcav
ator
sH
aptic
con
trol o
f exc
avat
ors
Mat
ched
impe
danc
e co
ntro
l –Sa
lcud
ean
Slid
ing
mod
e co
ntro
ller –
Ngu
yen
and
Ha
Hap
tic c
ontro
l of h
ydra
ulic
robo
tsH
uman
forc
e ex
tend
er –
Kaz
eroo
niTe
leop
erat
ion
of h
ydra
ulic
robo
ts –
Boo
k

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Proj
ect O
verv
iew
Expe
rimen
tal d
evic
esR
emot
e m
anip
ulat
or: H
AL
(hyd
raul
ical
ly
actu
ated
lifte
r)H
aptic
dis
play
: PH
AN
TOM
Pre
miu
m 1
.5Pr
oces
s Con
trol
Sepa
rate
com
pute
rs c
ontro
lling
eac
h de
vice
Inte
r-pr
oces
s com
mun
icat
ion
over
the
loca
l ar
ea n
etw
ork
usin
g U
DP
Inte
rnet
pro
toco
l

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
The
PHA
NTO
MH
aptic
Dis
play
Thre
e co
lloca
ted
mot
ors a
nd a
ngle
enc
oder
sTh
ree
angl
e en
code
rs o
n th
e st
ylus
Impe
danc
e de
vice
(a
s opp
osed
to a
dmitt
ance
)
Gho
st S
oftw
are
Low
leve
l con
trol
Virt
ual h
aptic
eff
ects
Dire
ct fo
rce
effe
cts b
ased
on
posi
tion
mea
sure
men
ts.

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
The
HA
L/Fo
rklif
t tru
ckV
ertic
al A
xis
Act
uate
d by
hyd
raul
ic c
ylin
der
Posi
tion
sens
or a
nd lo
ad c
ell
Hor
izon
tal A
xis
Act
uate
d by
a ro
tary
hyd
raul
ic m
otor
Posi
tion
sens
or a
nd n
o fo
rce
feed
back
Prox
imity
sens
or w
as a
dded
Sign
ifica
nt b
ackl
ash

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Issu
es
Hap
tic te
leop
erat
ion
of h
ydra
ulic
equ
ipm
ent
Erro
r gen
erat
ed fo
rce
feed
back
Usi
ng v
irtua
l con
stra
ints
to e
nhan
ce o
pera
tor
cont
rol
Pred
efin
ed c
onst
rain
tsSe
nsor
bas
edA
ugm
ente
d fo
rce
feed
back
bas
ed o
n fo
rce
mea
sure
men
t fro
m lo
ad c
ell
Switc
hing
bet
wee
n po
sitio
n an
d ra
te c
ontro
l

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
PHA
NTO
M C
ontro
l
f m=
f err
or+
f Virt
ualC
onst
rain
ts+
f Loa
df er
ror=
k me m
e m=
r m–
p mG
ener
ates
HA
L’s r
efer
ence
pos
ition
Rec
eive
s HA
L’s p
ositi
on10
00H
z ca
llbac
k fu
nctio
nsz–
dire
ctio
n fix
ed w
ith a
stiff
sprin
g fo
rce

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
HA
L C
ontro
l
Uni
ty fe
edba
ck
Ope
n lo
op tr
ansf
er fu
nctio
n –
Mer
ritt

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
HA
L C
ontro
l
Rou
th S
tabi
lity
–K
vKh
< 2ζϖ
Stea
dy e
rror
ana
lysi
sSt
ep in
put:
pos
ition
err
or →
zero
R
amp
inpu
t: po
sitio
n er
ror →
v s/K
vKh
Expe
rimen
tally
pic
ked
gain
s D
igita
lly im
plem
ente
d in
RTL
Iinux
at
1000
Hz

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
HA
L M
odifi
catio
nsEn
d Ef
fect
orH
ooks
Fork
s wou
ld li
mit
HA
L’s w
orks
pace
Dum
my
load
Stee
l box
∼10
0lb
Bar
s for
hoo
ks to
gra
bSe
nsor
sPr
oxim
ity se
nsor
On/
off c
onta
ct se
nsor
s

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Com
mun
icat
ion
Inte
rnet
UD
P so
cket
pro
gram
min
gT1
Eth
erne
t con
nect
ions
hav
e a
band
wid
th o
f 1.
5Mbp
s D
ata
pack
ets:
less
than
32b
ytes
= 2
56bi
tsLi
sten
ing
thre
ads h
andl
e as
ynch
rono
us in
com
ing
data
pac
kets
RTL
inux
cann
ot su
ppor
t soc
kets
Reg
ular
Lin
ux th
read
s ran
sock
ets
FIFO
’s(F
irst-I
n-Fi
rst-O
ut) l
inke
d R
TLin
ux a
nd L
inux

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Posi
tion
cont
rol
Mas
ter’
s pos
ition
⇒sl
ave’
s ref
eren
ceSl
ave’
s pos
ition
⇒m
aste
r’s r
efer
ence
Slav
e m
imic
s the
mot
ion
of th
e op
erat
or’s
ha
ndH
aptic
forc
e is
like
a v
isco
us d
ampe
rf er
ror∝
e m∝
e s→
∝v s

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Virt
ual H
aptic
Con
stra
ints
Hoo
ke’s
Law
sprin
gs: F
orce
= k
*xTw
o-si
ded
stiff
sprin
g si
mul
ates
a p
rede
fined
pat
hO
ne-s
ided
stiff
sprin
g si
mul
ates
a w
all
k =
k cif
x <
0k
= 0
if x
> 0
Use
d fo
r obs
tacl
e av
oida
nce
Ave
rage
hum
an w
ill b
e co
nvin
ced
that
a h
aptic
ef
fect
is im
mov
able
if it
can
dis
play
a st
iffne
ss o
f 2N
/mm
(11.
4lb/
in) –
Mas
sie
Impl
emen
ted
in m
aste
r’s w
orks
pace

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Sens
or B
ased
Virt
ual C
onst
rain
ts
Poss
ible
to c
reat
e co
nstra
ints
on
the
fly
usin
g da
ta fr
om p
roxi
mity
sens
ors,
GPS
or
othe
r sou
rces
Exam
ple:
HA
L’s H
oriz
onta
l Axi
sSi
mpl
e ta
sk o
f lift
ing
an o
bjec
tN
o fo
rce
feed
back
in h
oriz
onta
l dire
ctio
nO
bsta
cle
avoi
danc
ePo
sitio
ning
end
eff
ecto
r to
lift t
he lo
ad

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
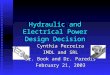
Prox
imity
Sen
sor C
onst
rain
t
2122
2324
2526
2728
2930
31111213141516171819
Hor
izon
tal(i
n)
Vertical(in)P
ath
of P
hant
omP
ath
of H
AL
Vir
tual
Con
stra
int
Pla
ne o
f Col
lisio
nP
roxi
mity
Sen
sor
Trip
ped
Hoo
k G
rabs
Loa
d

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
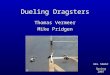
Rel
ayin
g th
e Lo
ad’s
Wei
ght
Load
forc
e –
aler
ts th
e op
erat
or to
the
pres
ence
an
d w
eigh
t of l
oad
Load
cel
l mea
sure
s the
forc
e ex
erte
d by
the
cylin
der
Forc
e on
end
eff
ecto
rFr
ictio
n ac
ting
on m
ast
Wei
ght o
f mas
tId
eally
onl
y th
e fo
rce
gene
rate
d by
the
end
effe
ctor
’s in
tera
ctio
n w
ith e
nviro
nmen
t wou
ld b
e m
easu
red

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Forc
e M
easu
rem
ent
05
1015
200102030
Tim
e(s)
Vert-Pos(in)
05
1015
205010
0
150
200
Tim
e(s)
Force(lb)

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Cou
lom
b Fr
ictio
n
Cou
lom
b fr
ictio
n: c
onst
ant f
orce
opp
osin
g ve
loci
tyC
hang
es in
the
sign
of t
he v
eloc
ity p
redi
cts
whe
n th
e fr
ictio
n fo
rce
will
jum
pR
emov
e un
wan
ted
forc
e fr
om m
easu
red
sign
al.
Cou
lom
b fr
ictio
nW
eigh
t of m
ast

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
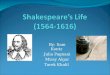
Adj
uste
d Fo
rce
Sign
al
05
1015
201520253035
Tim
e(s)
Vert-Pos(in)
05
1015
20-1
000
100
200
Tim
e(s)
Force(in)

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Com
men
ts
Cha
ract
eris
tics o
f the
Adj
uste
d fo
rce
sign
al
Cen
tere
d ar
ound
zer
o w
ith n
o lo
ad o
n th
e en
d ef
fect
orR
efle
cts t
he lo
ad’s
wei
ght
Has
forc
e sp
ike
ever
y tim
e th
e fr
ictio
n fo
rce
chan
ges
sign
Low
freq
uenc
y no
ise
Filte
r sig
nal
But
terw
orth
Filt
erEs
timat
e th
e w
eigh
t of t
he lo
ad b
y av
erag
ing
the
sign
al

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Smoo
thin
g ou
t sig
nal
05
1015
20-5
0050100
150
Tim
e(s)
Force(in)5H
z C
utto
ff F
requ
ency
0.5H
z C
utof
f Fre
quen
cyR
unni
ng A
vera
ge

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Run
ning
Ave
rage
Met
hod
Con
tact
sens
ors a
re n
ot tr
ippe
df L
oad
= 0
Con
tact
sens
ors a
re tr
ippe
dA
ssum
e lo
ad h
as a
con
stan
t wei
ght
f Loa
deq
ual a
vera
ge fo
rce
sign
al si
nce
cont
act s
enso
r was
tri
pped
Tape
rs o
f for
ce w
hen
load
is se
t dow
nTh
is p
roce
ss e
limin
ates
iner
tial f
orce
s in
the
forc
e m
easu
rem
ent

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Non
-hol
onom
ic S
lave
Pro
blem
Mos
t com
mer
cial
hyd
raul
ic e
quip
men
t is n
on-
holo
nom
icFo
rklif
t tru
ckEx
cava
tor
Hap
tic d
ispl
ays a
re n
orm
ally
hol
onom
icH
ow c
an a
hol
onom
ic m
aste
r con
trol a
non
-ho
lono
mic
?R
ate
cont
rol:
velo
city
of s
lave
∝re
lativ
e po
sitio
n of
the
mas
ter
Like
a jo
ystic
k: p
ositi
on ∝
velo
city

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Hyb
rid P
ositi
on/R
ate
Con
trolle
r
Posi
tion
cont
rol i
s mor
e in
tuiti
ve
Rat
e co
ntro
l can
han
dle
a no
n-ho
lono
mic
slav
esH
ybrid
pos
ition
/forc
e an
d hy
brid
rate
/forc
eSw
itch
into
forc
e co
ntro
l whe
n co
ntac
t is m
ade
with
a
cons
train
ed e
nviro
nmen
tH
ybrid
pos
ition
/rate
con
trol
Use
s pos
ition
con
trol t
o im
prov
e de
xter
ity
Switc
hes t
o ra
te c
ontro
l for
larg
e m
ovem
ents
Com
bine
s the
stre
ngth
of b
oth
cont
rol s
trate
gies

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
How
it w
orks
?B
oth
Mod
es:
f erro
r=
k me m
v s→
∝e s
= r s
–p s
= -e
m
Posi
tion
mod
e: r m
⇒p s
& r s
⇒p m
Rat
e m
ode:
r m
= co
nsta
ntTh
e sl
ave’
s ref
eren
ce b
ecom
es th
e in
tegr
al o
f the
m
aste
r’s r
elat
ive
posi
tion
erro
r Th
e fo
rce
disp
laye
d to
the
user
and
the
slav
e’s v
eloc
ity
are
cont
inuo
us

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Mod
e co
mpa
rison
Posi
tion
mod
er m
= p s
+ ∆
p r s
= p m
–∆p
∆p =
con
stan
t
Not
es p san
d r s
are
scal
ed to
mas
ter’
s wor
kspa
ceIn
bot
h m
odes
: fm∝
e m=
-es→
∝-v
s
Rat
e M
ode
r m=
cons
tant
r s=
p m –∆p
∆p =
r m–
p s

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Whe
n it
Switc
h M
odes
?
Thre
shol
d va
lues
of
e mco
uld
trigg
er th
e ch
ange
Will
aut
omat
ical
ly sw
itch
mod
esIf
it st
ays i
n po
sitio
n m
ode
too
long
the
mas
ter
still
mig
ht e
xcee
d its
wor
kspa
ceM
ight
nee
d to
re m
ap th
e sl
ave’
s pos
ition
to a
poi
nt
insi
de th
e m
aste
r’s w
orks
pace
Cou
ld c
hang
e m
ode
man
ually
usi
ng a
bu
tton

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Hyb
rid P
ositi
on/R
ate
Con
trolle
r
02
46
810
1214
1618
20051015202530354045
Tim
e(s)
Pos(in)P
HA
NTO
MH
AL

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Hyb
rid P
ositi
on/R
ate
Con
trolle
r
05
1015
200
0.51
Tim
e(s)
|error|(in)
05
1015
20
-101
Tim
e(s)
Phan-Force(lb)

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Con
clus
ion
Hap
tic e
nhan
cem
ents
of o
pera
tor c
ontro
lEr
ror f
orce
feed
back
Virt
ual c
onst
rain
tR
efle
ctin
g th
e lo
adPo
sitio
n/ra
te c
ontro
ller
Impl
emen
ted
in n
etw
ork
envi
ronm
ent

Nov
embe
r 11,
200
2In
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
IMD
LIM
DL
Inte
llige
nt M
achi
neIn
telli
gent
Mac
hine
Dyn
amic
s Lab
orat
ory
Dyn
amic
s Lab
orat
ory
mko
ntz@
mai
l.com
Que
stio
ns
Recommended