CHAPTER 1
INTRODUCTION
1.1 Theoretical Background:
The cycle rickshaw is a small-scale local means of transport; it is also known by a variety of other
names such as velotaxi, pedicab, bikecab, cyclo, becak, or trishaw or, simply,rickshaw which also
refers to auto rickshaws, and the, now uncommon, rickshaws pulled by a person on foot. Cycle
rickshaws are human-powered, a type of tricycle designed to carry passengers in addition to the
driver. They are often used on a for hire basis. Cycle rickshaws are widely used in major cities
around the world, but most commonly in cities of South, Southeast and East Asia.
1.2 Configurations:
The vehicle is pedal-driven by a driver, though some configurations are equipped with an electric
motor to assist the driver. Electric-assist pedicabs were banned in New York City in January 2008,
along with all other forms of electric vehicles; the city council decided to allow pedicabs propelled
only by muscle power. The vehicle is usually a tricycle, though somequadra cycle models exist,
and some bicycles with trailers are configured as cycle rickshaws. The configuration of driver and
passenger seats vary by design, though passenger seats are usually located above the span of the
longest axle.
1.3 Nomenclature:
Table 1.1 : Nomenclature of Rickshaw
1
S.No Country Nomenclature
1. India And Bangladesh Cycle Rickshaw
2. Cambodia Cyclo
3 Mayanmar Saika
4. China and Malaysia Trishaw
5. Indonesia Becak
6. Philippines Padyak
7. Mexico Bicitaxi or Taxi Ecologico

The Cycle rickshaw is an important mode of transportation in many small cities and towns in
India. The traditional cycle rickshaw is seen in many shapes and sizes but there is a common
thread that makes most of them rather inefficient, uncomfortable and often, unsafe vehicles. This
is one of the prime reasons for the gradually diminishing clientele of the cycle rickshaws.
1.4 Economic and political aspects
In many Asian cities where they are widely used, cycle rickshaw driving provides essential
employment for recent immigrants from rural areas, generally impoverished men. One study in
Bangladesh showed that cycle rickshaw driving was connected with some increases in income for
poor agricultural laborers who moved to urban areas, but that the extreme physical demands of the
job meant that these benefits decreased for long-term drivers. In Jakarta, most cycle rickshaw
drivers in the 1980s were former landless agricultural laborers from rural areas of Java.
2

CHAPTER 2
LITERATURE REVIEW
2.1 Dead axles/lazy axles
A dead axle, also called lazy axle, is not part of the drive train but is instead free-rotating. The rear
axle of a front-wheel drive car may be considered a dead axle. Many trucks and trailers use dead
axles for strictly load-bearing purposes. A dead axle located immediately in front of a drive axle is
called a pusher axle. A tag axle is a dead axle situated behind a drive axle. On some vehicles (such
as motor coaches), the tag axle may be steerable.
Some dump trucks and trailers are configured with lift axles (also known as airlift axles or drop
axles), which may be mechanically raised or lowered. The axle is lowered to increase the weight
capacity, or to distribute the weight of the cargo over more wheels, for example to cross a weight
restricted bridge. When not needed, the axle is lifted off the ground to save wear on the tires and
axle and to increase traction in the remaining wheels. Lifting an axle also makes the vehicle
perform better on tighter turns.
2.1.1 Causes of failure of axle:
Presence of cyclic overloads
Stress concentration
Wrong adjustment of bearings, insufficient clearance.
2.1.2 Desirable properties for material of axle
Sufficient high strength.
A low sensitivity to stress concentration.
Ability to withstand heat and case hardening treatment.
Good machinability
2.2 Curved Beams
3

One of the assumptions of the development of the beam bending relations is that all longitudinal
elements of the bean have the same length, thus restricting the theory to initially straight beams of
constant cross section. Although considerable deviations from this restriction can be tolerated in
real problems, when the initial curvature of the beams becomes significant, the linear variations of
strain over the cross section are no longer valid, even though the assumption of plane cross
sections remaining plane is valid. A theory for a beam subjected to pure bending having a constant
cross section and a constant or slowly varying initial radius of curvature in the plane of bending is
developed as follows. Typical examples of curved beams include hooks and chain links. In these
cases the members are not slender but rather have a sharp curve and their cross sectional
dimensions are large compared with their radius of curvature.
2.2.1 Introduction
Machine frames having curved portions are frequently subjected to bending or axial loads or to a
combination of bending and axial loads. With the reduction in the radius of curved portion, the
stress due to curvature become greater and the results of the equations of straight beams when
used becomes less satisfactory. For relatively small radii of curvature, the actual stresses may be
several times greater than the value obtained for straight beams [2]. It has been found from the
results of Photoelastic experiments that in case of curved beams, the neutral surface does not
coincide with centroidal axis but instead shifted towards the centre of curvature. It has also been
found that the stresses in the fibres of a curved beam are not proportional to the distances of the
fibres from the neutral surfaces, as is assumed for a straight beam.
2.2.2 Bending in the Plane of the Curve
In a straight beam having either a constant cross section or a cross section which changes
gradually along the length of the beam, the neutral surface is defined as the longitudinal surface of
zero fiber stress when the member is subjected to pure bending [7]. It contains the neutral axis of
every section, and these neutral axes pass through the centroids of the respective sections. In this
section on bending in the plane of the curve, the use of the many formulas is restricted to those
members for which that axis passing through the centroid of a given section and directed normal to
the plane of bending of the member is a principal axis. The one exception to this requirement is for
a condition equivalent to the beam being constrained to remain in its original plane of curvature
such as by frictionless external guides. To determine the stresses and deformations in curved
4

beams satisfying the restrictions given above, one first identifies several cross sections and then
locates the centroids of each. From these centroidal locations the curved centroidal surface can be
defined. For bending in the plane of the curve there will be at each section (1) a force N normal to
the cross section and taken to act through the centroid, (2) a shear force V parallel to the cross
section in a radial direction, and (3) a bending couple M in the plane of the curve. In addition there
will be radial stresses σr in the curved beam to establish equilibrium. Circumferential normal
stresses due to pure bending. When a curved beam is bent in the plane of initial curvature, plane
sections remain plane, but because of the different lengths of fibers on the inner and outer portions
of the beam, the distribution of unit strain, and therefore stress, is not linear. The neutral axis does
not pass through the centroid of the section. The error involved in their use is slight as long as the
radius of curvature is more than about eight times the depth of the beam. At that curvature the
errors in the maximum stresses are in the range of 4 to 5%. In part the formulas and tabulated
coefficients are taken from the University of Illinois Circular by Wilson and Quereau [4]. For
determining circumferential stresses at locations other than the extreme fibers, one can find
formulas in texts on advanced mechanics of materials [6] [7]. The circumferential normal stress is
given as
σθ = My/Aer
Where M is the applied bending moment, A is the area of the cross section, e is the distance from
the centroidal axis to the neutral axis, and y and r locate the radial position of the desired stress
from the neutral axis and the center of the curvature, respectively.
2.3 Rickshaw chain
A chain bicycle is a roller chain that transfers power from the pedals to the drive-wheel of a
bicycle, thus propelling it.
5

Figure 1.1 Basic Chain Derive geometry
Most bicycle chains are made from plain carbon or alloy steel, but some are nickel-plated to
prevent rust, or simply for aesthetics. Nickel also confers a measure of self-lubrication to a chain's
moving parts. Nickel is a relatively non-galling metal.
2.3.1 Efficiency
A bicycle chain can be very efficient: one study reported efficiencies as high as 98.6%. The study,
performed in a clean laboratory environment, found that efficiency was not greatly affected by the
state of lubrication. Larger sprocket will give a more efficient drive, reducing the movement angle
of the links. Higher chain tension was found to be more efficient: "This is actually not in the
direction you'd expect, based simply on friction" [6].
2.3.2. Chain Drive Systems
Consists of two or more sprockets connected with chain
The sprockets are mounted on shafts that are supported by bearings
Purpose: to transmit power and motion between shafts
6

2.3.3. Advantages over belt drive systems:
Do not slip or creep (no power loss from slippage)
More compact for a given capacity
Lower loads on shafts (because high tension is not required as with belt drives)
Easy to install
Not affected by sun, heat, or fluids (such as oil and grease)
Do not deteriorate with age
More effective at lower speeds
Require little adjustment
2.3.4. Advantages over gear drive systems:
Flexible center distances
Less expensive
Simpler installation and assembly
Better shock absorption
2.3.5. Disadvantages:
Require lubrication (in most cases)
Noisier than belt drives
More expensive than belt drives
Impractical for extremely long center-to-center distances where flat belts could be used
Less efficient than flat belts at extremely high-speed ranges
Must be used on parallel shafts; cannot twist chain like belts
7

Chordal action- slight pulsation in the output sprocket –becomes less pronounced as the
number of sprocket teeth are increased
Transmission Roller Chain is the most widely chain used because of its versatility.
2.3.6. Roller chains are made up of the following:
Roller link: inside link made up of two roller (inside) link plates, two bushings and two
rollers
o Roller link plate: one of the plates forming the tension members of a roller link
o Roller: a ring or thimble which turns over the bushing
o Bushing: a cylindrical bearing in which the pin turns
Pin link: outside link made up of two pin link plates assembled with two pins
o Pin link plate: one of the plates forming the tension members of a pin link
Connecting link: a pin link having one side plate that is detachable (retained by cotter pins
or a spring clip)
Offset link: a link consisting of two offset plates assembled with a bushing and roller at
one end and an offset link pin at the other end; used when chain has an odd number of
links
2.3.7 Roller Chain Sprockets
Types:
a) plate- flat hub less sprocket used for mounting on flanges, hubs or other devices,
b) Hub on one side- used for low-load applications and small diameter sprockets
c) Hub on both sides- used for large diameter sprockets and high-load applications
d) Detachable hub-plate sprocket mounted on hub
e) Shear pin and slip clutch sprockets- designed to prevent damage to the drive or other
equipment caused by overloads or stalls
8

Sprocket Classes
1) Commercial- used with slow to moderate speed drives; in general, drives requiring
Type A or Type B lubrication would use Commercial sprockets
2) Precision- used when extreme high speed in combination with high load is involved,
or where the drive involves fixed centers, critical timing, or close clearance with
outside interference; in general, drives requiring Type C lubrication may require
Precision sprockets (consult the manufacturer)
Sprocket Diameters
o Pitch diameter: diameter of the pitch circle that passes through the centers of the
link pins as the chain is wrapped on the sprocket
o Bottom diameter: diameter of a circle tangent to the curve (seating curve) at the
bottom of the tooth gap; equal to the pitch diameter minus the diameter of the roller
o Caliper Diameter: equal to the bottom diameter for a sprocket with even number of
teeth- for a sprocket with an odd number of teeth, it is the distance from the bottom
of one tooth gap to that of the nearest opposite tooth gap
o Outside Diameter: diameter of the circle at the tips of the teeth
Sprocket/Shaft mounting
o Both keys and set screws should be used to mount a sprocket to a shaft
o Key- used to prevent rotation
o Set screw- located over flat key to prevent longitudinal displacement
o American Chain Association recommendations.
Center distance between sprockets
o Minimum center distance: 1-1/2 times the diameter of the larger sprocket and a
minimum of 30 times the pitch (30 pitches)
9

o Optimum results: 30 to 50 pitches
o Maximum center distance: 80 pitches
o When necessary, drives may be operated with a small amount of clearance between
the sprockets; in these cases it follows that the center distance must be a little
greater than the sum of the half the diameter of the sprockets
o A longer chain is recommend in preference to the shortest allowed by the sprocket
diameters because the rate of chain elongation is inversely proportional to the
length
o Center distance, c = P/8 (2L – N2 – N1+ ((2L – N2 – N1)2 – 0.810(N2 – N1)2)1/2)
Where:
P = chain pitch
L = chain length in pitches
N2 = Number of teeth in large sprocket
N1= number of teeth in small sprocket
Size of sprockets
General practice to use minimum size sprocket of 17 teeth and maximum of 67 teeth in
order to obtain smooth operation and long life at high speeds
For greater life expectancy and smoother operation (because of the lessening of tooth
impact) use sprocket with 19-21 teeth
On low speed, special purpose, and/or space limiting operations, sprockets with fewer than
17 teeth can be used
Normal maximum number of teeth is 120
Chain wrap: minimum of 120 degrees on driver; will always be 120° with a two sprocket
drive with a ratio of 3.5:1 or less
Ratio of driver to driven sprocket should be no more than 6:1 10

rv = N1/N2 = n2/n1
Where:
N1 = Number of teeth of driver
N2 = Number of teeth of driven
n1 = angular velocity of driver (rev/min)
n2 = angular velocity of driven (rev/min)
2.3.8 Chain Length, Drive Arrangement, and Lubrication
Chain Tension
o Chain sag should be approximately 2 percent of the center distance
o An idler (when necessary) should be placed on the slack side of the drive
o When the idler is placed on the tight side of the chain to reduce vibration, it should
be on the lower side and located so the chain will run in a straight line between the
two main sprockets
Chain Length: function of the number of teeth in both sprockets and of the center distance
o Chain length is given in an integral number of pitches (with even number
preferable)
o Chain length L= 2C + (N2+ N1)/2 + (N2-N1)2/(4p 2C)
Where:
L= chain length (number of pitches)
C= center distance (pitches)
N2 = number of teeth in large sprocket
N1 = number of teeth in small sprocket
Lubrication
o Must be applied to minimize metal-to-metal contact
11

o If supplied in sufficient volume, it also provides effective cooling and impact
damping at higher speeds
Type A- Manual or Drip Lubrication: Manual-applied with a brush or spout can at least
once every eight hours; Drip-oil drops from a drip lubricator directed between link plates
Type B- Bath or Disc Lubrication: Bath- lower strand of the chain runs through a sump of
oil in the drive housing. The oil should reach the pitch line of the chain at its lowest point
while operating. Disc- chain operates above oil level; disc picks up oil and deposits it onto
the chain
Type C- Oil Stream Lubrication: oil applied continuously inside the chain loop evenly
across the chain width, and directed at the slack strand
2.4. Designing a Chain Drive System
Based on the following factors:
1. Average HP
2. RPM of driving and driven members
3. Shaft diameter
4. Permissible diameters of sprockets
5. Load characteristics (smooth and steady, pulsating, heavy-starting, or subject to peaks)
6. Lubrication
7. Life expectancy (total amount of service required, or total life)
2.4.1. Classification Of Chains :
Hoisting and hauling chains
Chain with oval links.
Chain with square links
Conveyor ( or tractive) chains
12

Detachable or hook joint type chain
Closed joint type chain
Power transmitting (or driving) chains
Block Chain
Bush Roller Chain
Inverted tooth or silent chain
2.4.2. Faliure Modes of Chain:
Fatigue of the link plate
Repeated loading/unloading from tight side to slack side.
Contact between roller and sprockets
Galling between the pain and bushing
2.5. Sprocket
The process designing and drawing a sprocket is an excellent way to incorporate algebra and
geometry skills and knowledge.
The following text offers the information and procedural steps necessary to generate the profile of
standard pitch sprockets. This process will yield an approximate tooth form that can be used to
generate solid models of the sprockets used in the GEARS-IDS kit of parts. The process of
producing and saving a solid model library of GEARS-IDS sprockets and parts, provides students
and instructors with the opportunity to combine algebra, geometry and trigonometry knowledge
with engineering drawing skills to produce the design elements necessary to fully visualize their
mechanical creations.
13

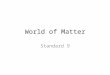
Figure 2.1 : Sprocket Tooth Geometry
2.5.1. Sprocket Tooth Design Formulas
Refer to above Sprocket Tooth Geometry figure.
The tooth form of a sprocket is derived from the geometric path described by the chain roller as it
moves through the pitch line, and pitch circle for a given sprocket and chain pitch. The shape of
the tooth form is mathematically related to the Chain Pitch (P), the Number of Teeth on the
Sprocket (N), and the Diameter of the Roller (Dr). The formulas for the seating curve, radius R
and the topping curve radius F include the clearances necessary to allow smooth engagement
between the chain rollers and sprocket teeth.
The following formulas are taken from the American Chain Association Chains for Power
Transmission and Material Handling handbook, and they represent the industry standards for the
development of sprocket tooth forms.
14

Table 2.1 Sprocket design formulae
P = Chain Pitch
N = Number of Teeth
Dr = Roller Diameter ( See Table)
Ds = (Seating curve diameter) = 1.0005 Dr +
0.003
R = Ds/2 = 0.5025 Dr + 0.0015
A = 35°+60°/N
B = 18°- 56°/N
ac = 0.8 x Dr
M = 0.8 x Dr Cos (35°+60°/N)
T = 0.8 x Dr Sin (35°+60°/N)
E = 1.3025 Dr + 0.0015
Chordal Length of Arc xy = (2.605 Dr +
0.003) sin (9°−28°/N)
yz = Dr [1.4 Sin (17° − 64/N) – 0.8 Sin (18° -
56°/N )]
ab = 1.4 Dr
W = 1.4 Dr Cos 180°/N
V = 1.4 Dr Sin 180°/N
F = Dr [ 0.8 Cos( 18° - 56° / N) + 1.4 Cos (17°
- 64°/ N]
H = √ F 2 - ( 14 Dr – P/2)2
S = P/2 Cos 180°/N + H Sin 180° / N
PD = P/ Sin [180°/ N]
2.5.2. Additional Sprocket Formulas:
Outside Diameter of a sprocket when j = 0.3P
OD = P (0.6 + Cot 180°/N)
Outside diameter of a sprocket when tooth is pointed
OD = P Cot 180° / N + Cos 180°/N (Ds – Dr) + 2H
CHAPTER 3
PRESENT WORK15

3.1. Problem formulation:
The rickshaw is made by an artisan. Every part of the body of rickshaw like its axle, its chain, its
curved plate etc are selected by artisan by his experience. We as a team were to study various
forces, acting points of various forces, the reaction of various forces etc and then to make
complete force analysis and hence to refine the existing design. It is an endeavor to improve upon
the existing design thereby making significant changes if necessary, to improve puller as well as
passenger comfort by reducing the overall weight of rickshaw without compromising the strength
and safety etc.
3.2 Objective:
The machine would be mechanically refined yet simple and easy to ride.
3.3 Experimental Work
In our experimental work, we firstly measure the weight of rickshaw. Then we consider the
problems of designing the axle for rickshaw, curved plate for rickshaw and chain for rickshaw.
3.3.1 Weight of Cycle Rickshaw
According to project point of view, firstly we measure the weight of cycle rickshaw.
Table 3.1 Weight of cycle rickshaw
S.No Parts Weights(In Kg)
1. Upper Parts (Body) 28.7
2. Lower Parts (Chaises) 50.3
3.4 Design of Curved Beams
Notations and Symbols Used
16

σ = Stress, MPa.
σd = Direct stress, tensile or compressive, MPa.
σi = Stress at inner fibre, MPa.
σo = Stress at outer fibre, MPa.
σbi = Normal stress due to bending at inner fibre, MPa.
σbo = Normal stress due to bending at outer fibre, MPa.
Mb = Bending moment for critical section, N-mm.
ci = Distance of neutral axis from inner fibre, mm.
co = Distance of neutral axis from outer fibre, mm.
e = Eccentricity, mm.
ri = Distance of inner fibre from centre of curvature, mm.
ro = Distance of outer fibre from centre of curvature, mm.
rc = Distance of centroidal axis from centre of curvature, mm.
rn = Distance of neutral axis from centre of curvature, mm.
d = Diameter of circular rod used in curved beam, mm.
h = Depth of curved beam [square, rectangular, trapezoidal or I-section], mm.
τmax = Maximum shear stress, MPa.
A = Area of cross-section of member, (curved beam), mm2.
P = Load on member, N.
3.4.1 Derivation of Expression to Determine Stress at any Point on the Fibres of a Curved
Beam
Consider a curved beam with rc, as the radius of centroidal axis, rn, the radius of neutral surface, ri,
the radius of inner fibre, ro, the radius of outer fibre having thickness ‘h’ subjected to bending
moment Mb.
Let AB and CD be the two adjacent cross-sections separated from each other by a small
angle dφ.
Because of Mb the section CD rotates through a small angle dα. The unit deformation of any fibre
at a distance y from neutral surface is:
17

Deformation, Є = δ/ l = yd α/(rn – y)dθ ………… (1.1)
The unit stress on this fibre is,
Stress = Strain × Young’s modulus of material of beam
σ = εE = Eyd α/(rn – y)dθ……………….(1.2)
For equilibrium, the summation of the forces acting on the cross sectional area must be zero.
i.e ∫ σdA = 0
or, ∫ Eyd αdA/(rn – y)dφ = 0
Ed α/dθ∫ydA/(rn-y) = 0 ……………..(1.3)
Also the external moment Mb applied is resisted by internal moment. From equation 1.2 we have,
∫ y(σdA) = M
i.e ∫ Ey2d αdA/(rn – y)dφ = M
Edα/ dφ ∫y2dA/(rn – y) = M ………………….. (1.4)
i.e M = Edα/ dφ∫(-y)dA + rn∫ ydA/(rn-y) ……………………(1.5)
Note: In equation 1.5, the first integral is the moment of cross sectional area with respect to
neutral surface and the second integral is zero from equation 1.3.
Therefore, M = [Edα/ dφ]Ae ………………. (1.6)
Here ‘e’ represents the distance between the centroidal axis and neutral axis.
i.e., e = rc − rn
Rearranging terms in equation 1.6, we get
dα/ dφ = M/AeE ………………….. (1.7)
Subsituting dα/ dφ = M/AeE in equation 1.2
We get,
Stress σ = Eydα/ dφ(rn – y) becomes,
= EyM/(rn – y)AeE
i.e σ = EyM/(rn – y)AeE ……………………(1.8)
18

But we know,
rn = v – y
y = rn – v
Therfore, from equation 1.3,
∫ ydA/(rn – y) = ∫ (rn – v)dA/(rn – y)
= rn∫ dA/v - ∫dA = 0
= rn∫ dA/V - A = 0
Or, rn = A/∫dA/v ……………… (1.9)
Note: Since e = rc – rn, equation 1.9 can be used to determine ‘e’. Knowing the value of ‘e’,
equation 1.8 is used to determine the stress σ .
3.5 Designing of curved beam in the rickshaw 1960N
52.5 mm 40 mm 95 mm
5 mm
4o mm
Figure 3.1 Side view and crossection of curved plate
Area of section, A = 40 x 5 = 200 mm2
= 200 x 10-6 m2
19

Bending moment due to load is =
M = 1960 x(40 + 52.5) x 10-3
= 181.3 Nm
Resultant stresses at inside and outside of curved section:
Direct stress, σd = P/A
= 1960/200 x 10-6
= 9.8 x 106 N/m2
= 9.8 Mn/m2 ------- (Compressive)
Now as the curved beam is of rectangular section, therefore:
h2 = R3/D Loge [(2R +D) / (2R-D)] - R2
Where:
R = radius of curvature of centroidal axis
D = depth of rectangular section plate curved beam
h2 = constant used in Winkler Bach Formula
In the rickshaw the values are:
R = 52.5 mm
= 0.0525 m
D = 5 mm
0.005 m
Put these values in given h2 formula, we get:
h2 = (0.0525)3 / (0.005) Loge [(2x 0.0525 + .005) / (2 x 0.0525 – 0.005)] – (0.0525)2
= 0.028940 Loge [1.1] – (.0525)2
= 0.00275827 – 0.0027562
= 2.0766 x 10-6 m2
20

Now bending stress due to M at inside point is:
σb = M/AR [1 – R2 / h (y / R - y)]
= 181.3/ (200 x 10-6 x 0.0525) [1 – (0.0525)2 / 2.0766 x 10-6 {0.0025/(0.0525 – 0.0025)}
= 17.26 x 106 [1- 0.0013315 x 106 (0.0025/0.05)]
= 17.26 x 106 [1- 0.0013315 x 106 (0.05)]
= 17.26 x 106 [1- 66.575]
= - 1131.82 x 106 N/m2
= - 1131.82 MN/m2------ (Compressive)
Now total stress at inside point is equal to direct stress at inside point + bending stress at inside point
= 9.8 MN/m2 + 1131.82 MN/m2
Total stress = 1141.62 MN/m2 (compressive)
For stress at outside point:
Now bending stress due to M at outside point is:
σb = M/AR [1 + R2/ h (y / R+ y)]
= 181.3/ (200 x 10-6 x 0.0525) [1 + (0.0525)2 / 2.0766 x 10-6 {0.0025 / (0.0525 + 0.0025)}
= 17.26 x 106 [1 + 0.0013315 x 106 (0.0025 / 0.0525 + 0.0025)]
= 17.26 x 106 [1 + 0.0013315 x 106 (0.04545)]
= 17.26 x 106 [1 + 60.5]
= 1061.49 x 106 N/m2
= 1061.49 MN/m2---------- (tensile)
Now total stress at point 1 is equal to direct stress at outside point + bending stress at outside point
= 9.8 MN/m2 (compressive) + 1061.49 MN/m2 (tensile)
Total stress = 1051.69MN/m2 (tensile)
21

3.6 Design of dead axle for the rickshaw:
In the rickshaw, the total length of the axle rod is 80 cm. The whole sitting arrangement (3920 N)
weight is placed on the axle rod at two points exactly 11 cm from the each end. So 58 cm is the
span of axle between these two points. From the given arrangement and for the analysis purpose
the axle is assumed to be a simply supported beam carrying two equal loads of 1960 N each acting
at two points 11 cm from each end. The total weight is shifted to the ground on two rim and tyre
pairs.
As the axle is not transmitting any torque, so there are not any external shear stresses set up
in the axle. Therefore the axle is designed for bending only. But as the lateral loading is there, on
the axle, so shear forces also develop in the axle along with the bending stresses. Since at every
point it is assumed that the particles of the material of axle is in equilibrium, the effect of shearing
forces and bending moments must be consistent. There is involvement of two factors. The applied
shearing forces will be distributed as a shearing stress across transverse sections of the axle. But at
each point on the section, the transverse shearing stress will produce a complimentary horizontally
shearing stress i.e there will be shearing stresses acting between successive layers of the beam,
tending to resist sliding between these layers. So we have to firstly calculate the bending stresses
by using bending moment equation and then shear stresses using necessary formulae:
Axle 1960 N 1960 N
AXLE LOADING DIAGRAM
11 cm 11 cm
80 cm
1960N 1960N
SF DIAGRAM
22

1960N 1960N
21560Ncm 21560Ncm
BM DIAGRAM
0 Ncm 0 Ncm
Figure 3.2 : Loading ,SF and BM diagram of axle
For bending stresses
The bending moment equation is used as follows:
M/I = σb/y = E/R
Where: M = maximum bending moment on the axle
I = moment of inertia of circular axle
y = distance of extreme fiber of axle rod from its neutral axis (=d/2)
E = young’s modulus of elasticity of the material of axle
R = radius of curvature of bending axle neutral axis
σb = bending stress in the axle rod
In the given rickshaw, the diameter of the axle rod is d = 2.54 cm
d = 2.54 cm
I = 3.14 d4/64
23

= 3.14 x (2.54)4/64
= 2.0421355 cm4
y = 1.27 cm
Now bending stress, σb = M * y/I
σb = (21560 * 1.27)/ 2.0421355
σb = 13408.121N/cm2
For shearing stresses
The equation for calculating maximum shear stress in the circular section of axe is
τ = 4S/3 π R2
Where :
S = maximum shear stress on the axle
R = radius of the axle rod
τ = shear stress developed due to shear force S
now in the present axle the maximum shear stress as is clear from the shearforce diagram is,
S = 1960 N
R = 1.27 cm
Therfor applying the above shearing equation:
τ = 4S/3 π R2
τ = (4 x 1960)/(3 x 3.14 x 1.27 x 1.27)
τ = 516 N/cm2
24

Now due to both bending and shear stress the net principle stresses developed in the axle. These
principal stresses are given by the following formula:
σp = σb/2 + √σb/2 + τ2
So, principle stresses are:
σp = 13408.121/2 + √(13408.121/2)2 + (516)2
σp = 6704.0605 + √44944427 + 266256
σp = 6704.0605 + √ 45210683
σp = 6704.0605 + 6723.889
σp1 = 13427.95 N/cm2
&
σp2 = -19.82 N/cm2
Now according to shear strain energy theory or distortion energy theory (Von-Mises Henky
Theory) the elastic failure occurs where the shear strain energy per unit volume in the stressed
material reaches a value equal to the shear strain energy per unit volume at the elastic limit
point in the simple tensile test.
Mathematically the equation of failure is written as:
σet2 = σp1
2 + σp2
2 – σp1 σp2
σet2 = (13427.95)2 + (-19.82)2 - (13427.95) (-19.82)
σet2 = (180309841.2) + (392.83) + 266141.97
σet2 = 180576375.999
σet = 13437.87 N/cm2
25

σet = 134.37 MN/m2
therefore the axle is safe in rickshaw because as per the given loading conditions or constraints the
maximum elastic limit stress needs to be equal to 134.37 MN/m2 which is far less than the elastic
limit stress of mild steel material.
3.7 Design Procedure for Chain:
Determine the velocity ratio of the chain drive
V.R = 3.142(DN)/60
Where D = Diameter of the pitch circle
Select the minimum number of teeth on the smaller sprocket.
Find the number of teeth on the largest sprocket
T2 = T1 * N1/N2
Pitch line velocity of the smaller sprocket
V1 = 3.142d1 N1/60
Load on the chain
W=Load/Pitch line velocity
Centre distance b/w the sprockets = p(30-50)
Number of chain links
K = (T1 +T2)/2 + 2x/p + [{T2 + T1}/2*3.142] [{T2 + T1}/2*3.142] p/x
Length of the chain. L = K*p
3.8 Designing Chain Design for the Rickshaw:
The velocity ratio of chain drive
V.R.=3.142[D*N]/60
D=diameter of the pitch circle.
=3.142[10*18]/60
=9.56mm
Minimum number of teeth on the smaller sprocket
T(s) =16
26

The number of teeth on the larger sprocket
T(l)=T(s)*N1/N2
[NI/N2=Speed ratio]
=16*2
=32
Pitch line velocity of the smaller sprocket
V(s) = 3.142*d1*NI/60
Where d1=pitch dia. of driving sprocket.
=3.142*50*16/60
=0.40m/s
Load on the chain;
W=load (L)/pitch line velocity
400kg =L / 0.40
L =400/0.40
=398.52N
Center distance between the sprockets:
30<Cp<50
Cp=center distance in number of pitches.
Chain in even number of pitches
= P (30-50) = 15.875(20)
Cp=410mm
Number of chain links; K = (Ts+Tl)/2+2x/p+[{Tl+Ts}/2*3.14]*
*[(Tl+Ts)/2*3.14] p / x
= (16+32)/2+2*0.2/15.875 + [(16+32)/2*3.14]
*[(16+32)/2*3.14]15.875/0.2
=90
Length of the chain;
K*P=120/4*15.875
=04ft
27

CHAPTER 4
RESULTS AND DISSCUSSION
The principal idea was to develop a modern cycle rickshaw that could demonstrate the possibility
of growth of this traditional mode of transportation in India to counter the growing menace of
28

motor vehicular pollution. It provides comfortable and safe seating. Following results are obtained
after analysis:
Design of axle is safe
Design of curved plate is safe
Chain is designed for the rickshaw
REFERENCES
[1] Shepard W.K., (1907), “Problems in strength of materials” Ginn and company,
New York
29

[2] Merriman M., (1910), “Mechanics of materials”, John Wilay and Sons, Chapman
and Hall Limited
[3] Timoshenko S., (1923), “Bending Stresses in Curved Tubes of Rectangular Cross-
section” ASME journal, Volume, 45, p. 135 - 143
[4] Wilson B. J. and J. F. Quereau (1927), “A Simple Method of Determining Stress in
Curved Flexural Members” ASME Journal, Volume 45, pp 64 – 73, 1927
[5] S P Timoshenko, S.P, (1953), “History of the Strength of Materials”, McGraw-Hill
[6] Cook R. D. and W. C. Young (1998), ‘‘Advanced Mechanics of Materials,’’ 2nd
edition, Prentice-Hall
[7] Budynas R. G. (1999), ‘‘Advanced Strength and Applied Analysis,’’ 2nd edition,
McGraw-Hill
[8] Sharma P.C., Aggarwal D.K., (1999), “Machine Design” 9th edition, S.K Kataria
and Sons, India
[9] Rajput R.K., (2006), “ Strength of Materials” 8th edition, S Chand and Company,
India
[10] Bansal R.K., (2007), “Strength of materials” 4th edition, Luxmi Publications, India
30
Recommended








![Matter and Change Matter and Change Matter and Its Properties] Matter and Its Properties]](https://img.pdfslide.us/doc/110x75/56649e0a5503460f94af21b8/matter-and-change-matter-and-change-matter-and-its-properties-matter-and-its.jpg)