LOCALIZATION OF MOBILE ROBOTS
Dilupa HerathSupervised by:
1. Prof S.D Pathirana
2. Mr. Darshana Athauda
WHAT IS LOCALIZATION?
oWhere am I?
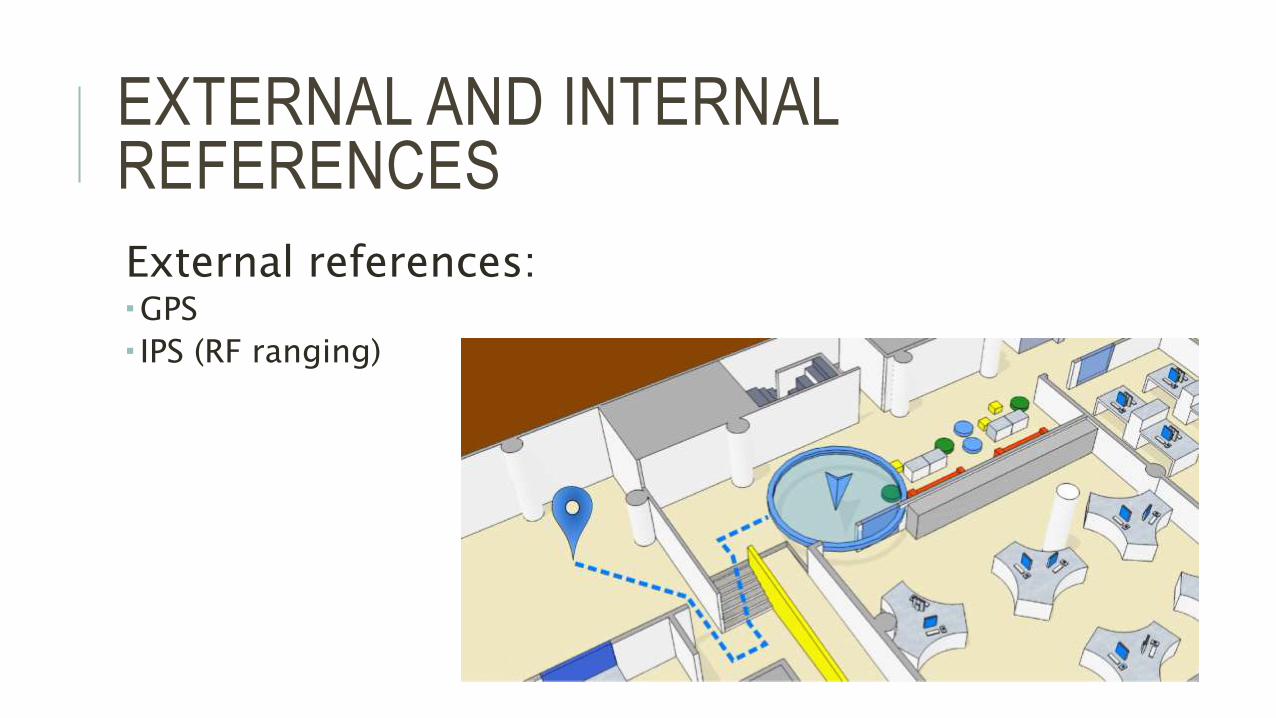
EXTERNAL AND INTERNAL REFERENCES
External references:GPS
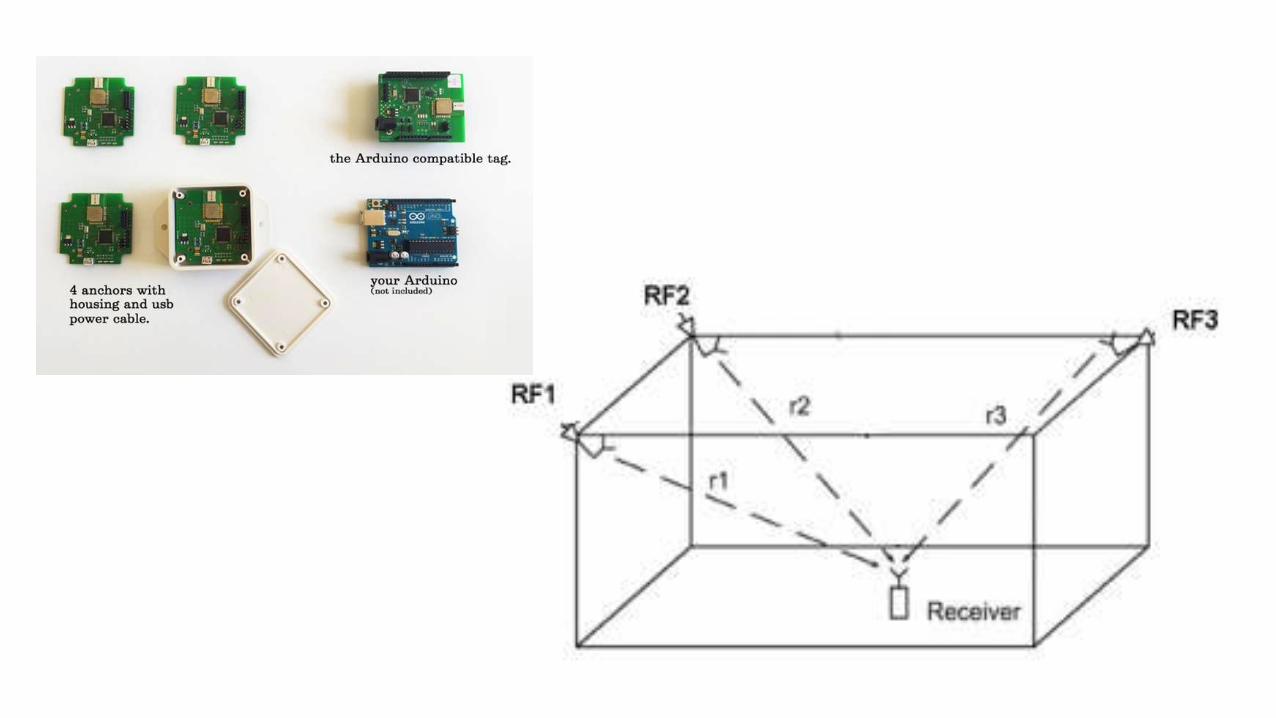
IPS (RF ranging)
External referencing is accurate
Easy to use
Expensive
Limits the range of operation
Have to use a third party map
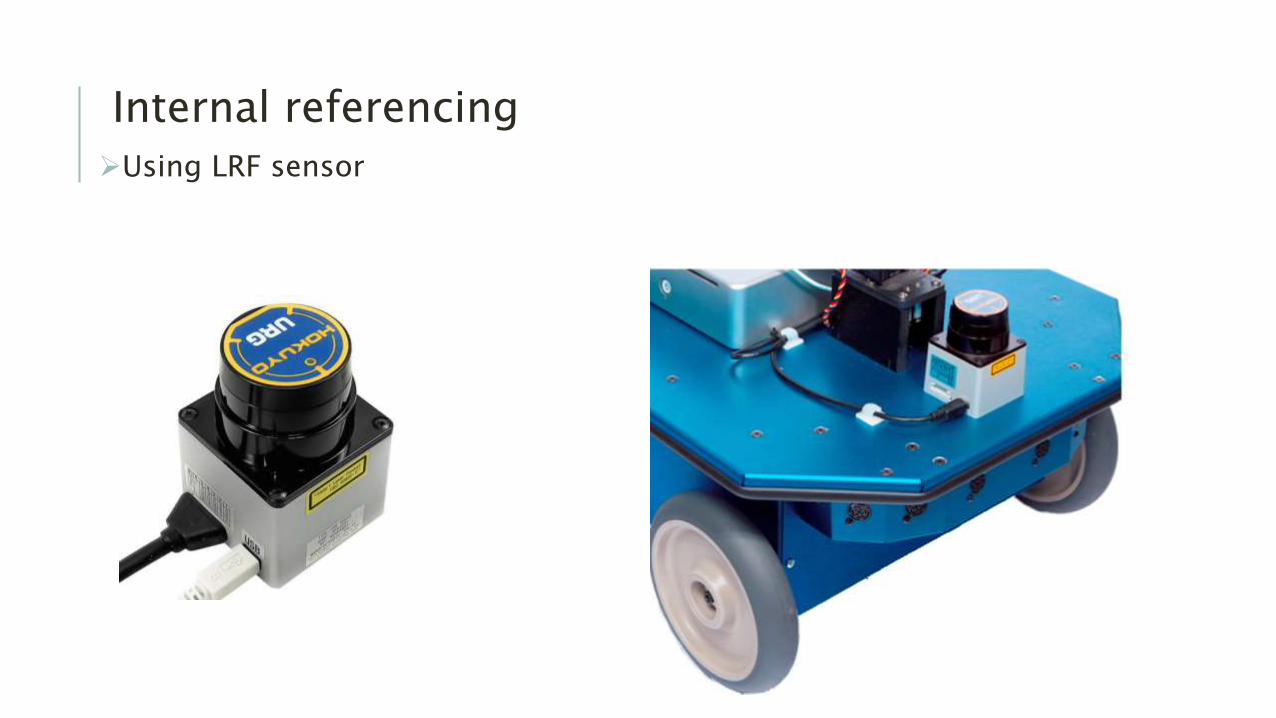
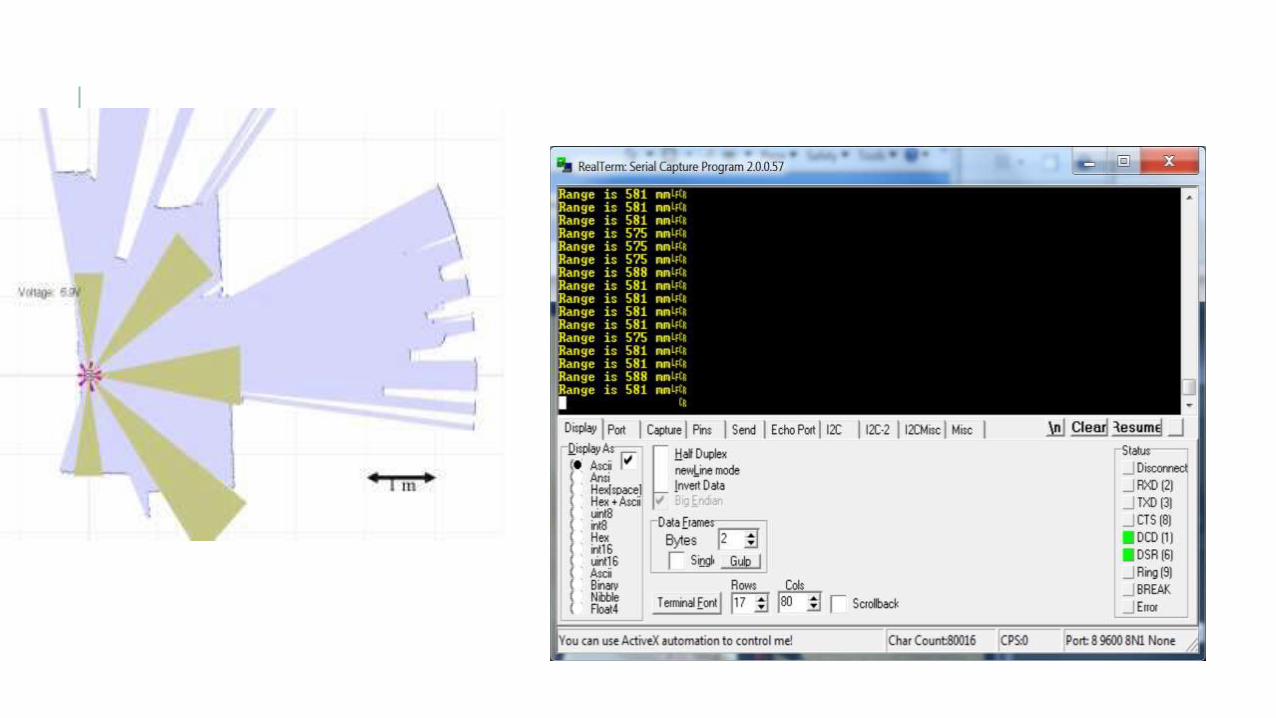
Internal referencing
Using LRF sensor
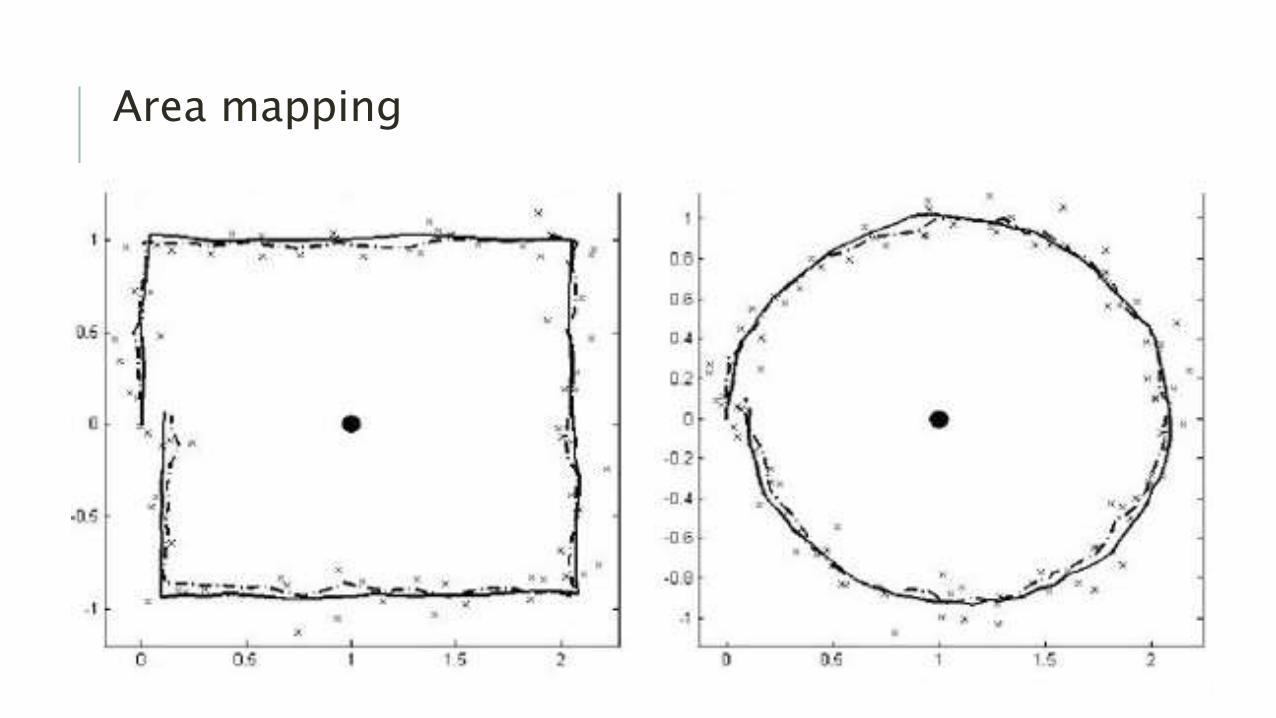
Area mapping
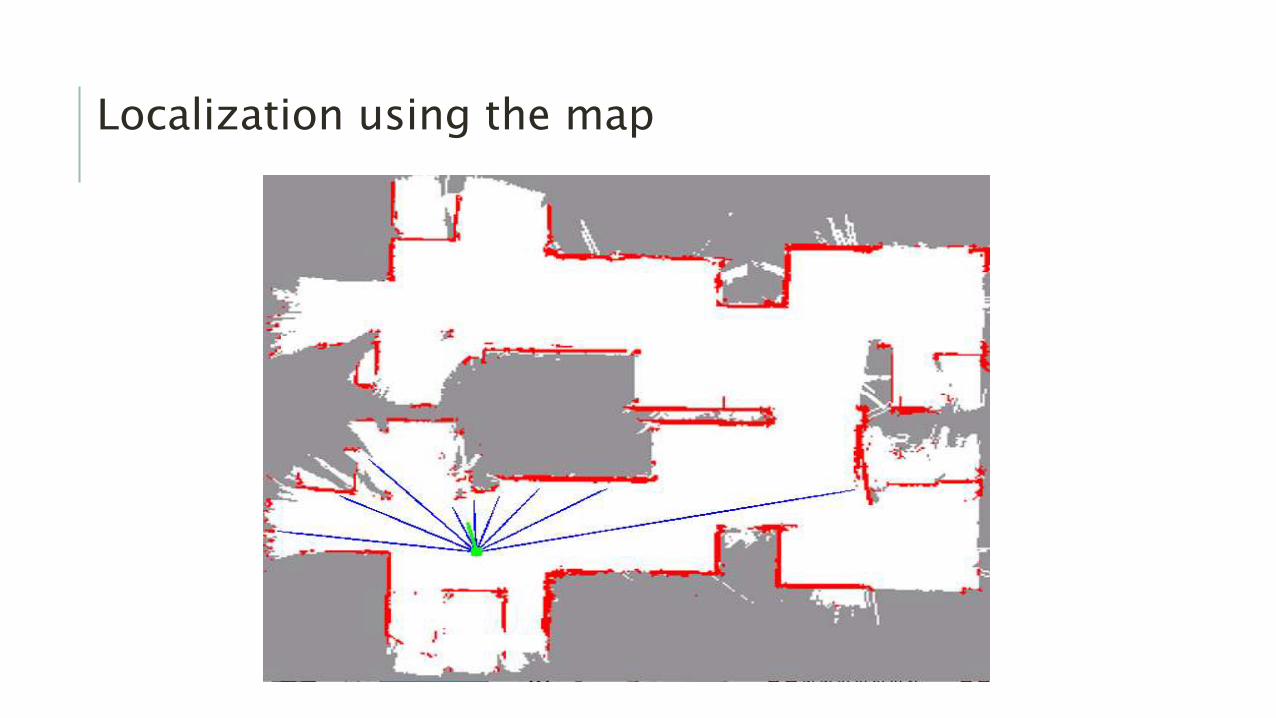
Localization using the map
Probability based algorithm has to be used for localization.
Monte Carlo Localization algorithm
Expected accuracy is 10cm

FUTURE PLANS
Localization using image processing
THANK YOU!
Recommended