1SAFESPOT – Local Dynamic Maps for Cooperative SystemsApril, 12th 2007, CRF – SP2 Infrasens meeting
Local dynamic maps in cooperative systemsLocal dynamic maps in cooperative systems
IP - “Smart Vehicles on Smart Roads”IP - “Smart Vehicles on Smart Roads”
Christine Bartels
Tele Atlas (Germany), [email protected]
SINTECH Task Leader “Local Dynamic Maps”
SAFESPOTSAFESPOTSAFESPOTSAFESPOT

2SAFESPOT – Local Dynamic Maps for Cooperative SystemsApril, 12th 2007, CRF – SP2 Infrasens meeting
SINTECH Local Dynamic Maps - Scenarios
A real time updatable Local Dynamic Map is defined as• Integration of standard digital maps with dynamic (short time) and local (short range) layers
of information collected by the infrastructure or by the vehicles (road status, obstacle presence, etc.).
Focus on new contents and information that is provided in real-time• need of high efficiency algorithms• definition of an adaptive optimal coverage range• compatibility with standard digital maps
The main target is to provide a representation of vehicle’s and infrastructure surroundings with all static and dynamic safety relevant elements
The local dynamic map model relies on the notion of a perception area (i.e. the coverage area of the ego-vehicle perception) and comprises at least
• surrounding objects, such as vehicles, obstacles and landmarks, e.g. in terms of relative positions, estimated dynamic states and attributes as well as associated confidence measures,
• road segments, e.g. in terms of geometrical parameters and attributes (road state, width etc.)
• traffic information/status for individual road segments or regions of the map• weather or visibility status for individual road segments or regions of the map • Open question: What about trajectories?

3SAFESPOT – Local Dynamic Maps for Cooperative SystemsApril, 12th 2007, CRF – SP2 Infrasens meeting
SINTECH Local Dynamic Maps – Map Layers
map fromprovider
landmarks for referencing
treeidposcurbs…
treeidposcurbs…
temporaryregional info !
accidentidpos…
accidentidpos…
fogidposa,b…
fogidposa,b…
congestionidposlengthdir…
congestionidposlengthdir…
com nodes,fusion result
egoposvel…
egoposvel…
rsuidpostype…
rsuidpostype…
vehidposveltype…
vehidposveltype…

4SAFESPOT – Local Dynamic Maps for Cooperative SystemsApril, 12th 2007, CRF – SP2 Infrasens meeting
SINTECH Local Dynamic Map interfaces to SP4/SP5 applications
SP4 / SP5 applications clients:• Interface towards the Local
Dynamic Map to get data – no editing function?
VANET: Vehicular Ad-hoc NetworkLDM: Local Dynamic MapQ-API: Query APIT-API: Transaction APISP4/5
cmp Component Model
Certified Client #1,2,...,M
Applicatioin #N Broker
Application #N (SP4/5)
Certified Client #N+1Broker management
Sensor #N (Radar/Laserscanner) VANET
communication
Data Fusion with Database Surv eillance
#1 #N commap #N+1 #N+x
Transaction Query
Transaction Call Generation
Ego Postioning (v ehicle only)
Object refinement Situation refinement
LDM Database (SP1/2) Serv er
Not Certified Clients #M+1,..., N
Application #1 (SP4/5)
Message Generation & Management
VANET communication
SP3: LDM Margin Generation (v ehicle
only)
Message Broker
Broker
Static Map
Sensor #1 (GPS)
HMI Management (SMA)Application #1 Broker
Nav igation Data
Traffic Control States (infrastructure only)
HMI subsystem (v ehicle only)
Message Stack
Q-API
Q-API
Q-API
T-API
Q-API
LDM data
appl #1dataselection
SP3
Brokers:• cast requests
into queries and subscriptions to notifications
• select/filter data• translate messages,
notifications• remote procedure
calls over platform network
SP1-5,7

5SAFESPOT – Local Dynamic Maps for Cooperative SystemsApril, 12th 2007, CRF – SP2 Infrasens meeting
SINTECH Local Dynamic Map interfaces to sensing systems
Local Dynamic Map APIstowards the Data Fusion and Database Surveillance:
- T-API (transaction) to edit the Local Dynamic Map
- Q-API (query) to get information
The door is still left open to exchange raw data information between the systems.
The transaction call handling andgeneration is done by brokers.There is a specific component for data that shall be distributed.
cmp Component Model
Certified Client #1,2,...,M
Applicatioin #N Broker
Application #N (SP4/5)
Certified Client #N+1Broker management
Sensor #N (Radar/Laserscanner) VANET
communication
Data Fusion with Database Surv eillance
#1 #N commap #N+1 #N+x
Transaction Query
Transaction Call Generation
Ego Postioning (v ehicle only)
Object refinement Situation refinement
LDM Database (SP1/2) Serv er
Not Certified Clients #M+1,..., N
Application #1 (SP4/5)
Message Generation & Management
VANET communication
SP3: LDM Margin Generation (v ehicle
only)
Message Broker
Broker
Static Map
Sensor #1 (GPS)
HMI Management (SMA)Application #1 Broker
Nav igation Data
Traffic Control States (infrastructure only)
HMI subsystem (v ehicle only)
Message Stack
Q-API
Q-API
Q-API
T-API
Q-API
LDM data
appl #1dataselection
SP3SP1/2 SP1-5,7

6SAFESPOT – Local Dynamic Maps for Cooperative SystemsApril, 12th 2007, CRF – SP2 Infrasens meeting
SINTECH Local Dynamic Map architecture proposal and role in SAFESPOT
Local Dynamic Map Component:• Separates the applications from the data fusion and object surveillance
functions• Provides a standardized access of real time information towards the
applications and sensing systems depending on their application category:– Application category 0: LDM-DB specific services (LDM margin
provision, transaction handling on the LDM-DB)– Application category 1: Certified SAFESPOT applications that provide
transactions for changes in the LDM-DB on the sensing system side (SP1, SP2) and SP4, SP5 applications that provide information that will be communicated to the sensing systems and possibly put on the communication network
– Application category 2: SAFESPOT applications that have access towards the LDM-DB but don’t provide further data to the sensing systems or the communication network.
• Handles all safety relevant information that shall be shared and needs to be available for more than one cooperative systems safety application
• The Local Dynamic Map is considered as database in SAFESPOT. Further specifications will be handled according to this assumption!

7SAFESPOT – Local Dynamic Maps for Cooperative SystemsApril, 12th 2007, CRF – SP2 Infrasens meeting
SINTECH Local Dynamic Map – LDM and Broker
Broker query management via
• Query coordination and optimization
• Application configuration file of possible needed data
Static Map database
Additional Static data to support sensing systems
AP
I
Sqlite – database(or other dbs: oracle, jdb)
AP
I
• Spatial queries on the static map
• map matched reference to the static map
Q-A
PI
Q-A
PI
T-A
PI
• ADASIS (horizon)
• Specific data
access functions
• Specific views
• Spatial queries
Broker – Management of queries
Sensing systems (SP1, SP2)
SafeSpot safety warning applications
(SP4, SP5)
&
Message
broker

8SAFESPOT – Local Dynamic Maps for Cooperative SystemsApril, 12th 2007, CRF – SP2 Infrasens meeting
SINTECH Local Dynamic Map – Message broker
• The message broker will push all safety relevant data on the communication network according to all over agreed defined rules (SP7)
• The focus is set on safety relevant data that can support other actors (cooperative approach)
• The message broker will not provide all dynamic LDM content!
Generalization level 0 (highest accuracy level)
…
Generalization level 1 (events, generalization level 1 of static map data)
SAFESPOT focus
Broadcast via
C2C
Other possible dynamic content - LDM extension in CVIS?
Other communication channels?

9SAFESPOT – Local Dynamic Maps for Cooperative SystemsApril, 12th 2007, CRF – SP2 Infrasens meeting
a2a2 a3a3 a4a4 a5a5
h1h1
h2h2
h3h3
e3e3
e2e2
b3b3b4b4
b5b5
b2b2
f1f1
i1i1 i2i2 i3i3
22
55
d1d1d2d2
d3d3
d4d4 7788
99
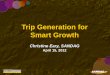
Interference pointsInterference points
b1b1
e1e1
44
66
Bicycle pathBicycle path
1100
11
33
a1a1
i4i4
SINTECH Local Dynamic Map – Static map extensions

10SAFESPOT – Local Dynamic Maps for Cooperative SystemsApril, 12th 2007, CRF – SP2 Infrasens meeting
INFRASENS – Additional sensor in SAFESPOT
Recommended