Lecture 518.086

Phase vs. group velocity• Remember from physics:
R. J. LeVeque — AMath 585–6 Notes 187
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 0
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 0.4
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 0.8
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 1.2
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 1.6
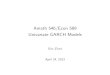
Figure 13.6: The oscillatory wave packet satisfies the dispersive equation ut + aux + buxxx = 0. Alsoshown is a black dot, translating at the phase velocity cp(ξ0) and a Gaussian that is translating at thegroup velocity cg(ξ0).
phase velocity
group velocity

Dispersion in LW schemeR. J. LeVeque — AMath 585–6 Notes 187
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 0
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 0.4
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 0.8
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 1.2
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 1.6
Figure 13.6: The oscillatory wave packet satisfies the dispersive equation ut + aux + buxxx = 0. Alsoshown is a black dot, translating at the phase velocity cp(ξ0) and a Gaussian that is translating at thegroup velocity cg(ξ0).
R. J. LeVeque — AMath 585–6 Notes 187
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 0
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 0.4
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 0.8
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 1.2
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
time = 1.6
Figure 13.6: The oscillatory wave packet satisfies the dispersive equation ut + aux + buxxx = 0. Alsoshown is a black dot, translating at the phase velocity cp(ξ0) and a Gaussian that is translating at thegroup velocity cg(ξ0).

Lax equivalence theorem• So far we considered stability and accuracy as independent
properties, but they are linked by the
Lax equivalence theorem
For a consistent approximation of a well-posed linear problem: stability <=> convergence

Lax equivalence thm.• Give an IVP ut = Au, u(0) = u0
• Say we have an operator S such that U(t+�t) = S�tU(t) = Sn�tU(0)
• For the analytical solution, the situation is u(t+�t) = R�tu(t) = Rn�tu(0)
• The discretization leading to S has order of accuracy p if
||S�tu�R�tu|| c1(�t)p+1
If p>0, the discretization is called consistent
• The IVP is well-posed if ||Rn�tu(0)|| c3||u(0)||
• The are called convergent if:{S�t} lim�t!0,n�t=t
||Sn�tu(0)� u(t)|| = 0
• The are called stable if:{S�t}
||Sn�tU || c2||U ||, for all n, �t with 0 n t

Lax equivalence theorem• So far we considered stability and accuracy as independent
properties, but they are linked by the
Lax equivalence theorem
For a consistent approximation of a well-posed linear problem: stability <=> convergence

Rate of convergence• We can use the previous framework to redefine the accuracy (local and global
error).
• Nothing new… :-)
• Local error: ||S�tu�R�tu|| c1(�t)p+1
• Global error: ||U(n�t)� u(n�t)|| = ||(Sn�t �Rn
�t)u(0)||
• The global error can be estimated as (p: order of accuracy - as before!)
Lecture||(Sn�t �Rn
�t)u(0)|| c1c2c3�tp||u(0)||
• => stability is sufficient for convergence (necessary: not shown)

2nd order PDEs (sect. 6.4): The wave equation
• Wave equation:
• Produces waves with velocities +/- c (i.e. in both directions!)
utt
= c2uxx
• General solution: u(x,t) = F1(x+ct) + F2(x-ct)
• For given initial conditions u(x,0) and ut(x,0):
u(x, t) =1
2[u(x+ ct, 0) + u(x� ct, 0)] +
1
2c
Zx+ct
x�ct
u
t
(x̃, 0)dx̃
Lecture

Numerics for the wave equation
• Equivalent 1st order problem: @
@t
✓v1
v2
◆=
✓0 c
c 0
◆@
@x
✓v1
v2
◆
with v1 = ut
, v2 = cux
• Can use Lax-Wendroff/Friedrichs like for 1-way wave eq!• But there are better suited/simpler methods• Again the question is: How to discretize time (2nd order!) and space

Numerics for the wave equation• Consider space discretization first, i.e. transform into ODE
d
2
dt
2Uj = c
2Uj+1 � 2Uj + Uj�1
�x
2 (using method of lines)
= Uxx + O(Δx2) (check this!)
• Using ansatz we findUj
= G(t)eikj�x
F = sinc(k�x/2)
Gan(t) = e±icktGdisc(t) = e±icFkt
• Discretized space already leads to dispersion (F=F(k)), i.e. waves with different k travel at different speeds cF(k)
Lecture
• What happens if we also discretize time?

4
Schär, ETH Zürich
t
n+1!
n!
n-1!
n-2!
x i-3! i-2! i-1! i! i+1! i+2! i+3!
CFL criterion for Leapfrog scheme
numerical domain of dependence
physical domain of dependence
!"!t
+ u !"!x
= 0Equation:
!in+1 = !i
n–1 –" !i+1n #!i–1
n( ) with " = u$t$x
Scheme:
stable |uΔt/Δx| ≤ 1
unstable |uΔt/Δx| > 1
Leapfrog scheme• Easiest numerical scheme for 2nd order problem: Leapfrog
Notation:
Uj,n+1 � 2Uj,n + Uj,n�1
�t
2= c
2Uj+1,n � 2Uj,n + Uj�1,n
�x
2
Uj,n = U(j�x, n�t)
• Stability: |r| ≤ 1 (equiv. CFL condition!)
• Accuracy: 2nd order
Lecture
Lecture / see Mathematica notebook leapfrog_stability.nb
c
c
Recommended