Inspecting Large Irrigation Networks
in the Indus Basin: Challenges and
Prospects
IEEE RAS Technical Committee on Agricultural Robotics. Webinar. Feb 27, 2015
Abubakr Muhammad, PhD Assistant Professor of Electrical Engineering
Director, Laboratory for Cyber Physical Networks and Systems
LUMS School of Science & Engineering
Lahore, Pakistan
Acknowledgements
• Joint work with
– PhS & MS Students: Syed M. Abbas, Hamza Anwar,Talha
Manzoor, Mudassir Khan
– Collaborators: Prof Karsten Berns, RRLab, Univ of
Kaiserslautern, Germany
• Funding
– LUMS Faculty Initiative Fund (2014)
– DAAD Grant: Robotic Profiling of Waterways. RoPWat
(2014-15)
• General Support
– Punjab Irrigation Department (PID)
– International Water Management Institute (IWMI)

Outline
• Motivation and context
• Smart water grids philosophy
• Siltation of canals and rivers
• Traditional canal cleaning process ( بھل صفائی )
• Proposed solution
• Towards performance limits
• Conclusions and outlook
LUMS Overview
• Pakistan’s 2nd Private University
– Founded in 1985
– Non-profit organization
– 100 acre campus
• 2300 Student Body
– Approx. 1800 undergraduates & 500 graduate students
– 35% women
– 60% resident on-campus
• 120 faculty members
– PhD’s from Stanford, MIT, Yale, Oxford, Cambridge, Imperial
2/27/2015
Cyber Physical Networks & Systems (CYPHYNETS) Lab
Est. 2008
• Director
PhD Georgia Tech, Postdocs (Penn, McGill)
• 2 Jr. Faculty
PhD Warick (control), PhD Siegen (robotics)
• 3 PhD students
• 6 MS students
• 4 Full-time Research Assistants
• 1 Lab Engineer
• 2 Lab Technicians
Areas
• Water Networks & Hydro-informatics
• Agricultural Automation & Robotics
• Cyber-Physical Systems
http://cyphynets.lums.edu.pk

Graduate Training / Outreach
New Graduate Courses at LUMS
• EE-561, Digital Control Systems
• EE-662, Parameter & State Estimation
• EE-562, Robot Motion Planning
• CMPE-633c, Geometric Mechanics & Control
• CMPE-633b, Robot Dynamics & Control
• EE-565, Mobile Robots
Conferences / Workshops Organized
• International Workshops on Intelligent Water Grids (IWG), 2013
– Symposium on Pakistan’s Water Futures
– Workshop on Sensing and and Control for Water Networks
– Workshop on Hydro-informatics
– Mini-course on System Identification of Irrigation Channels
• Workshop Series on Field and Assistive Robotics (2011-2015)
– 1st, 3rd, 5th, 7th, 9th in Lahore, Pakistan
– 2nd, 4th, 6th , 8th in Dagstuhl / Kaiserslautern, Germany
NMO Secretariat, IIASA-Pakistan collaboration (2012-)
IEEE CSS Society Pakistan Chapter (2011-)
Field & Assistive Robotics
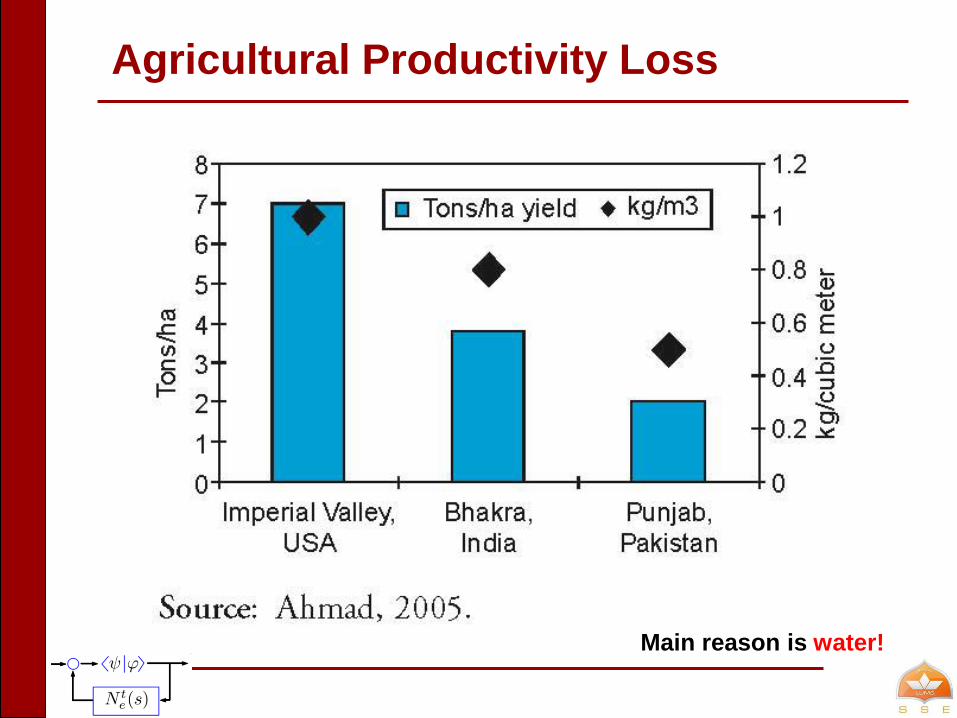
Agricultural Productivity Loss
Main reason is water!
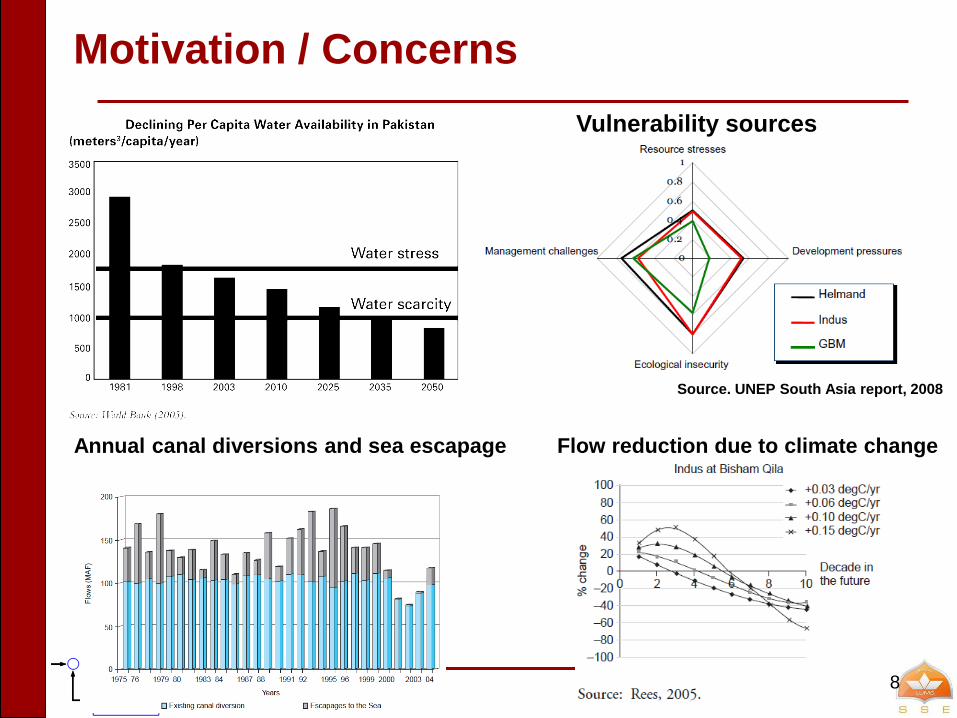
Motivation / Concerns
8
Annual canal diversions and sea escapage Flow reduction due to climate change
Vulnerability sources
Source. UNEP South Asia report, 2008

Managing the World’s Largest Irrigation Network
90,000 Km of watercourses
3 reservoirs, 23 barrages
45 canal commands
36 million acre irrigated area
System Efficiency: extremely poor!

A Networked Smart Water Grid
Embedded controller
Gate control
Flow Measurements
Wireless connectivity
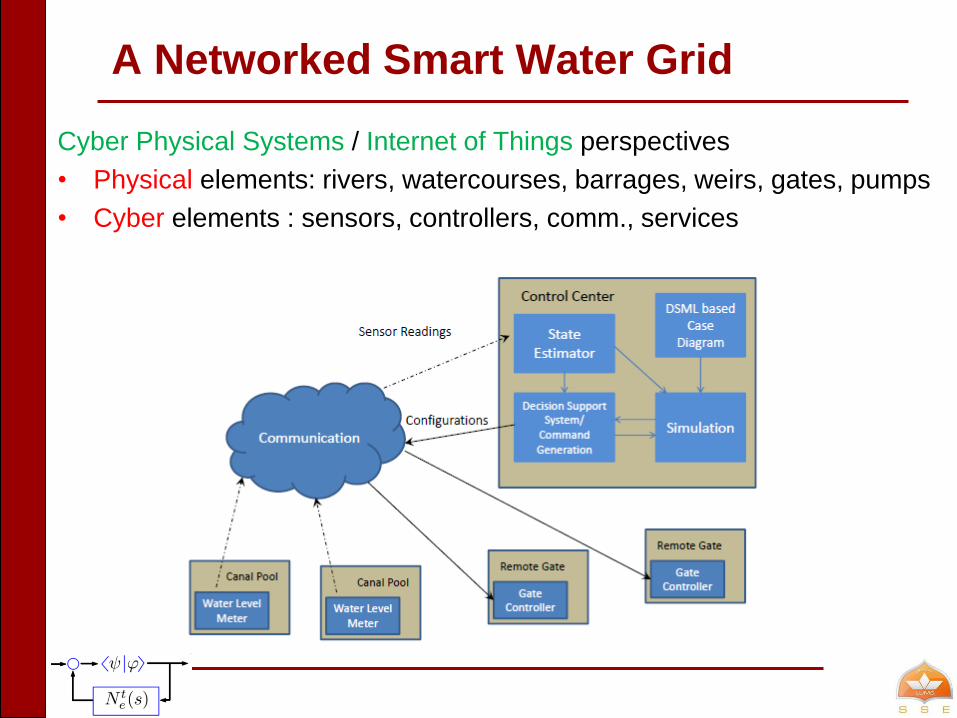
A Networked Smart Water Grid
Cyber Physical Systems / Internet of Things perspectives
• Physical elements: rivers, watercourses, barrages, weirs, gates, pumps
• Cyber elements : sensors, controllers, comm., services

Smart Water Metering: E. Sadqiya Hakra Br. Canal Command
LUMS-IWMI-Punjab Irrigation Dept. Collaboration (2012-14)
Laboratory for Cyber Physical Networks & Systems
Dept. of Electrical Engineering, LUMS
Project Site: 17 Distributaries in Bahawalnagar.
System Architecture (above). Field installations (below).

Identification & Control of Irrigation Channels (2011-14)
Laboratory for Cyber Physical Networks & Systems
Dept. of Electrical Engineering, LUMS
3 31 2 2
, 1, 1
( )( ) ( ).i
i in i i out i
dy tc h t c h t
dt
Abstraction

Autonomous Land Vehicles for Demining & Agriculture
ALVeDA & MDRD (2010-2013)
Robot Vision: Terrain Classification, RGB-D & Monocular SLAM, Visual Servoing, Soil Estimation in a
Bucket Excavator.
Field Experiments: Channel mapping in Lahore (left).
Scanning a minefield in Beirut (right).
Collaboration: RRLab, TU Kaiserslautern
Funding: DAAD, LUMS, National Instruments
Objective: Push performance limits with low-
cost vision sensors and simple mechatronics.
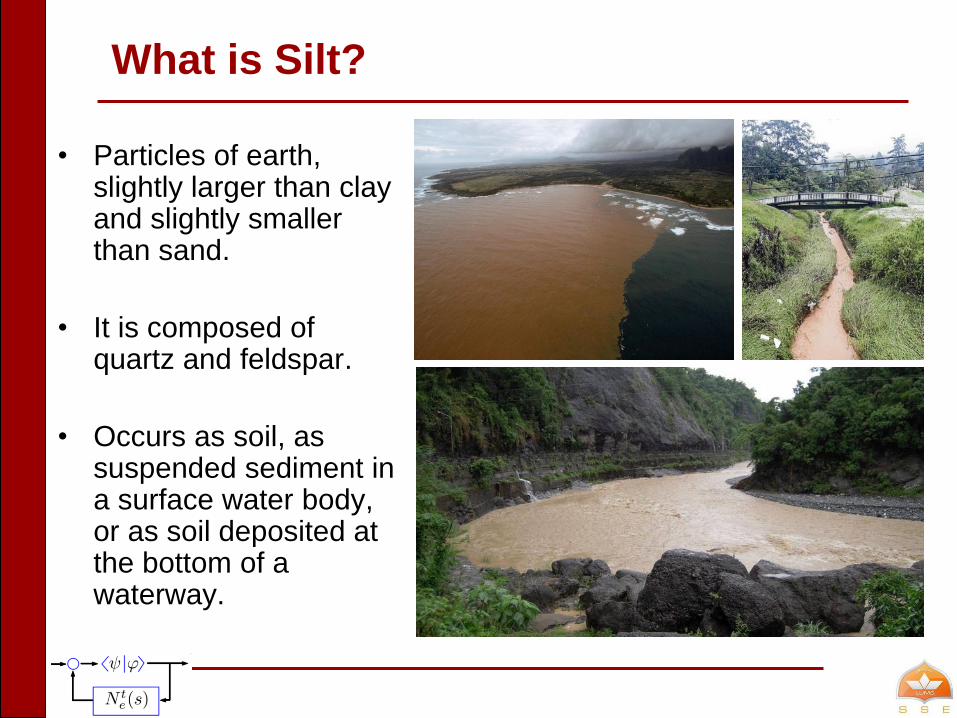
What is Silt?
• Particles of earth, slightly larger than clay and slightly smaller than sand.
• It is composed of quartz and feldspar.
• Occurs as soil, as suspended sediment in a surface water body, or as soil deposited at the bottom of a waterway.
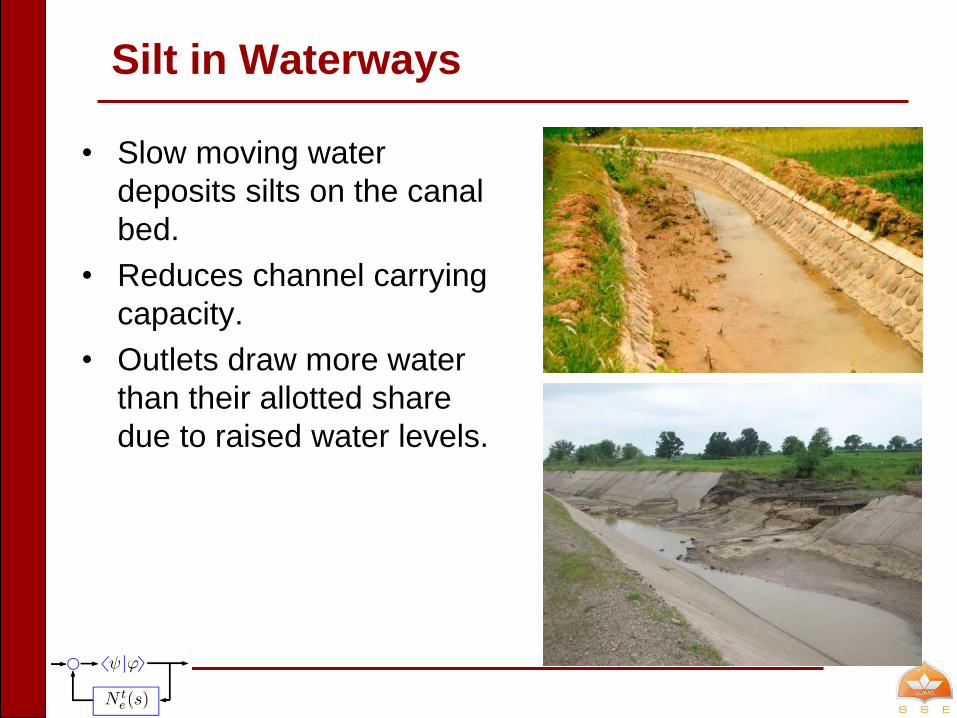
Silt in Waterways
• Slow moving water
deposits silts on the canal
bed.
• Reduces channel carrying
capacity.
• Outlets draw more water
than their allotted share
due to raised water levels.

Silt Removal in Punjab بھل صفائی
• Punjab Irrigation Department first started large-scale de-silting of canals during 1990s.
• Since then, PIDA (Punjab Irrigation and Drainage Authority) conducts this campaign annually to clean its canals of silt and other garbage.

Inspection of Canal Water Beds
• Bed levels observed every 1000 ft.
• Silt depth of more than 6 inches is marked for
removal.
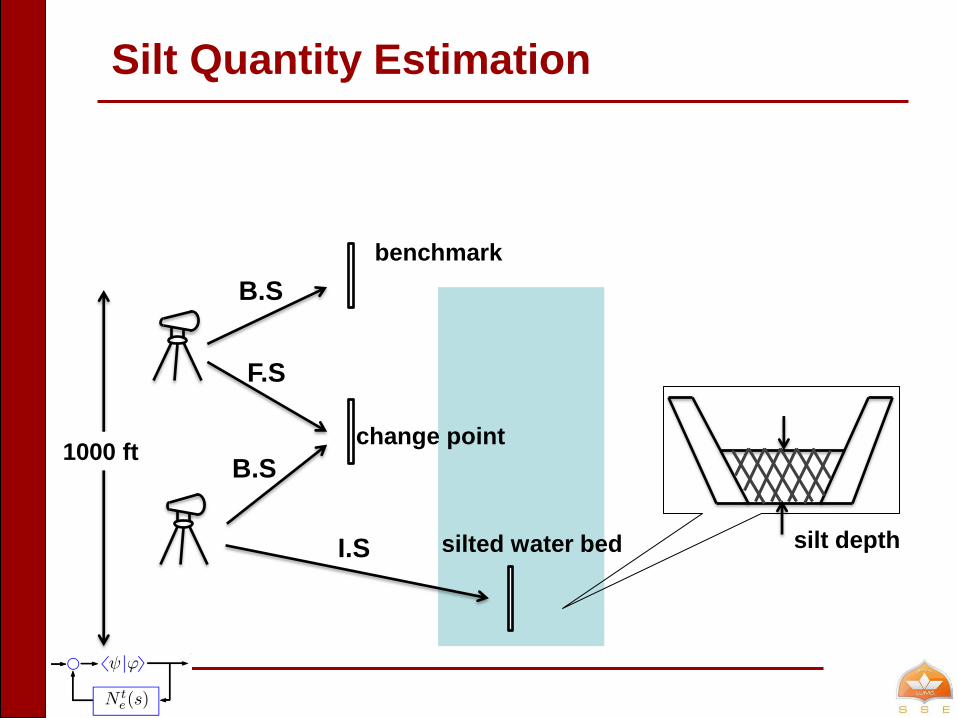
Silt Quantity Estimation
I.S
F.S
B.S
B.S
benchmark
silted water bed
change point
silt depth
1000 ft
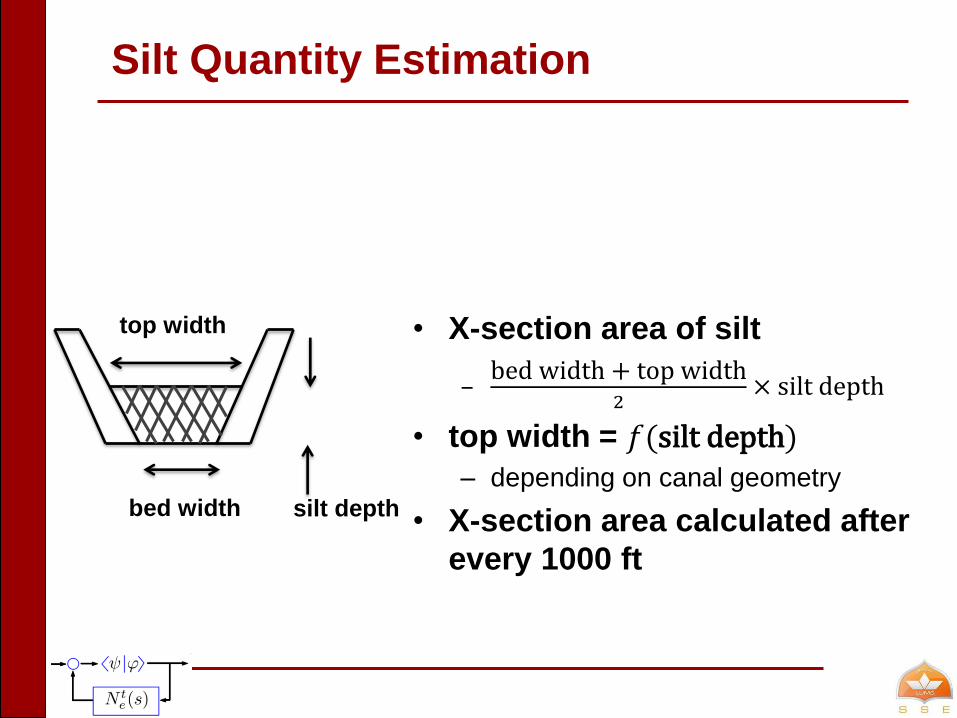
Silt Quantity Estimation
silt depth bed width
top width • X-section area of silt
–bed width + top width
2× silt depth
• top width = 𝑓(silt depth)
– depending on canal geometry
• X-section area calculated after
every 1000 ft

Silt Quantity Estimation
• Water bed divided into
patches of 1000 ft length
– Area calculated at both ends
of a single patch (A1 and A2).
• Silt volume (cft)
–A1+A2
2× 1000
I.S
F.S
B.S
B.S
benchmark
silted water bed
change point 1000 ft
Estimate of silt clearance

Various Methods of Silt Removal
How Can We Automate This Process?
• Extent of the canal system (40,000km+) and the tight
time-lines (< 3 weeks)
• Makes it feasible to consider an automated solution
as a scalable and economic alternative to manual
operation.
• Cleaning automation is too ambitious.
• Perhaps, we can start by profiling / inspection only?
Challenges
• While cleaning, the original shape of the cross-section
and bed-slope must be restored.
• What is the “true profile”?
• Selection of map granularity to measure the deviation
from the true profile.
• A way to deploy and recover the profiling system.
• Profiler must not obstruct the canal operation.
• Profiler must have the capability to negotiate narrow
passages and soft muddy beds.
• Solution should be fast and easily scalable
• Minimal specialist training.

Proposed solution
• An autonomous aerial inspection system

Robotic Profiling for Clearing Watercourses (RoPWat)
• Development of semi-autonomous robotic system for profiling watercourses
• 3D perception system to be deployed on commercial vehicles
• UAV for monitoring state of the canal
• Simulation of the cleaning process
• Simulation of vehicle for cleaning
• Sponsored by LUMS Faculty Initiative Fund (FIF) and later by DAAD.

Proposed Solution

CMU Riverine Mapping Project
Riverine reconnaissance with a
low-Flying intelligent UAS.
Scherer et al. River mapping from a flying robot:
state estimation, river detection, and obstacle mapping,
Autonomous Robots, Vol. 32, No. 5, May, 2012.
An online state estimation system
A self supervised vision based river detector.
A scrolling incremental distance transform algorithm.
A novel scanning LADAR configuration & analysis of measurement data.

What is Achievable?
• Analysis on 1D version of the aerial inspection problem
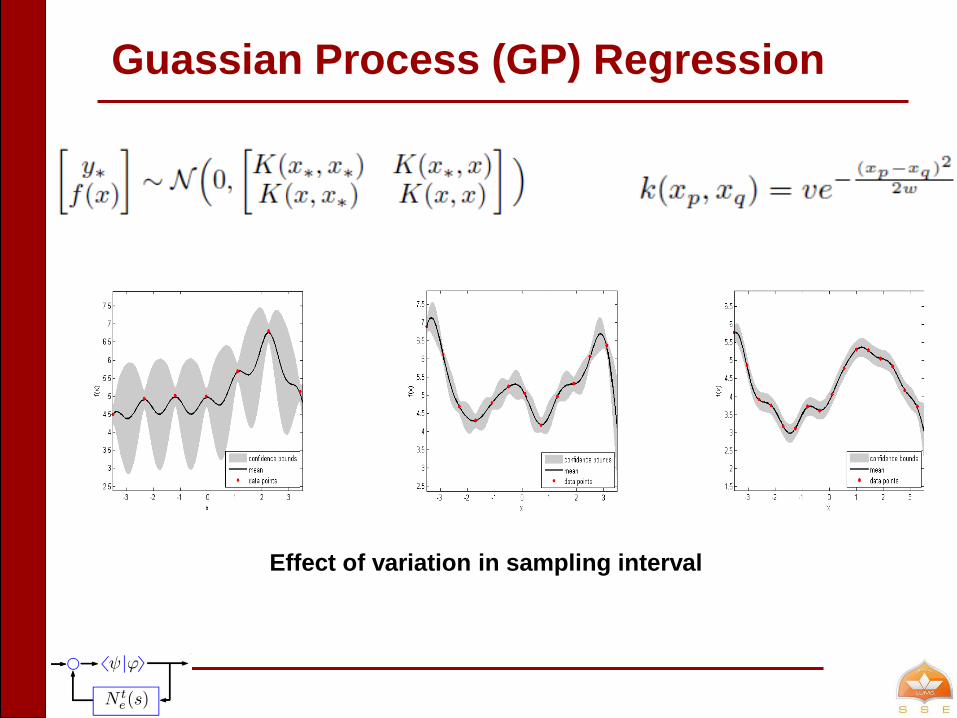
Guassian Process (GP) Regression
Effect of variation in sampling interval
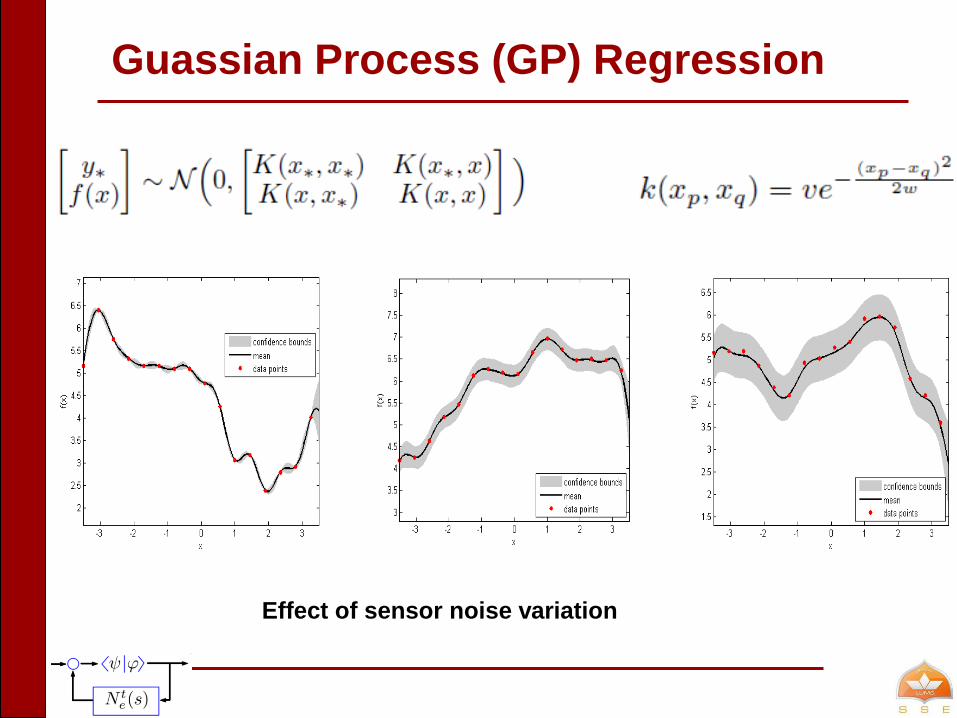
Guassian Process (GP) Regression
Effect of sensor noise variation
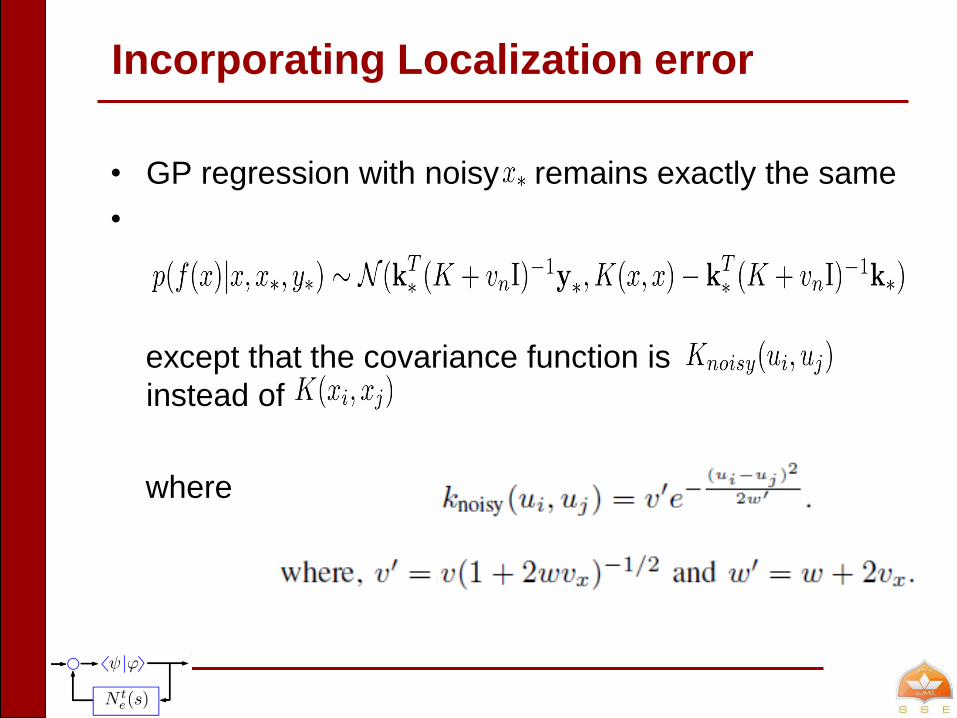
Incorporating Localization error
• GP regression with noisy remains exactly the same
•
except that the covariance function is
instead of
where
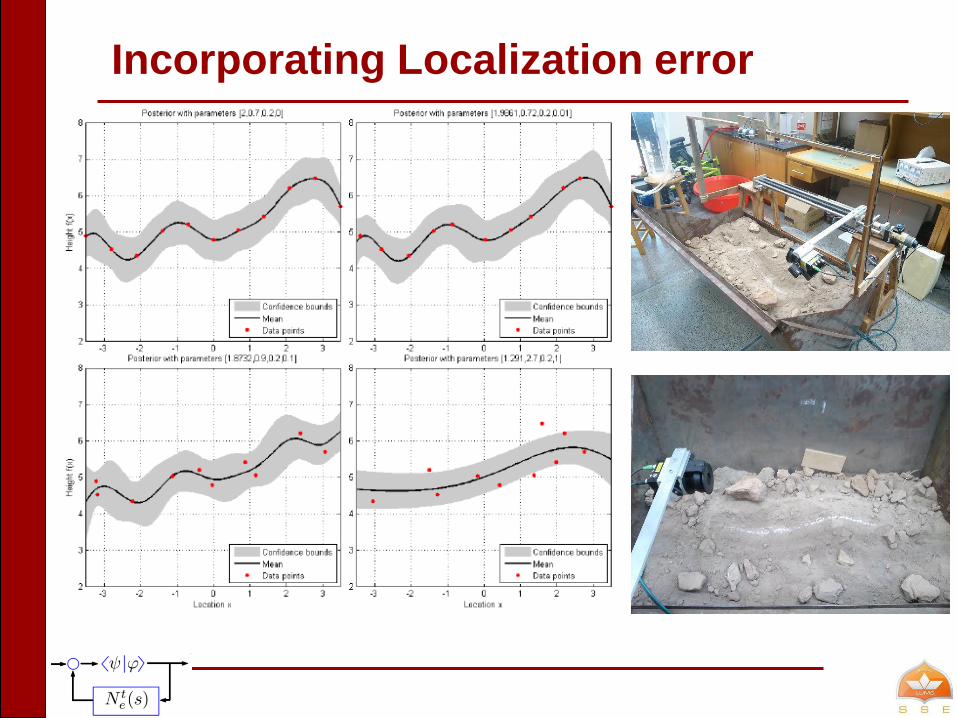
Incorporating Localization error
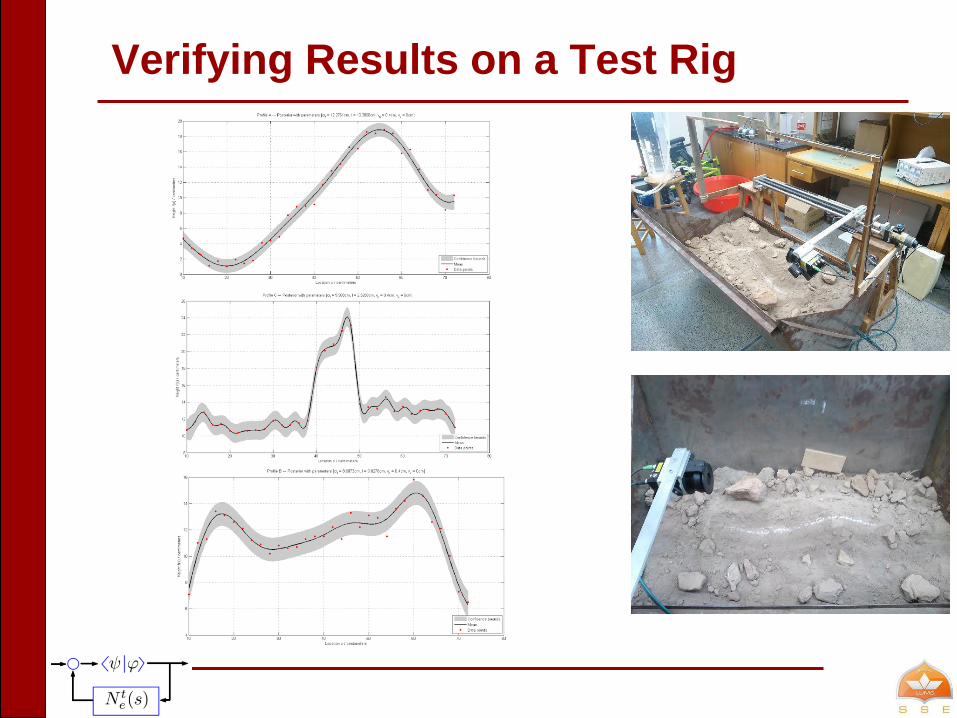
Verifying Results on a Test Rig
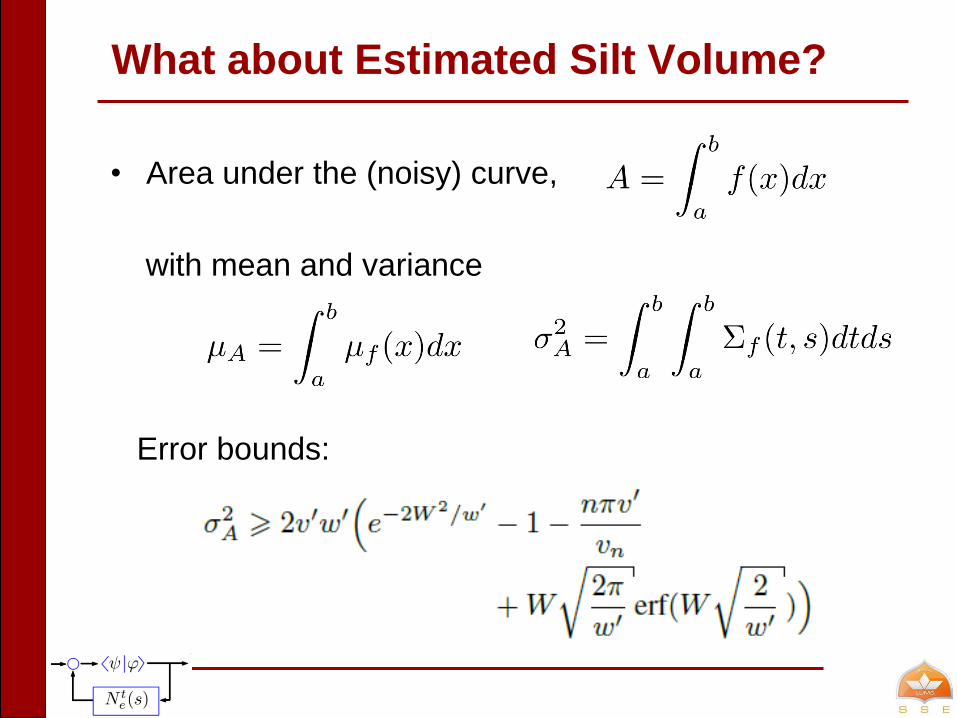
What about Estimated Silt Volume?
• Area under the (noisy) curve,
with mean and variance
Error bounds:
Analysis
• Localization error matters “more” than sensor precision
• Translates to strict requirements on positioning / elevation sensors and good algorithms
• The point of the analysis is not to construct new algorithms but to find what is achievable.
• This really challenges the state of the art in
– analytical methods
– systems engineering
• Framework is generic: analysis carries over to 3D case.
Progress
2014: Team building, analysis, framework
2015: System building, testing of algorithms
2016: Field Trials

Some Basic Questions …
• Why Automation in developing countries like Pakistan?
– Devolution of governance
– Ensuring rights
– Conflict resolution
• Major challenges
– Natural resources
– Food and Agriculture
– Critical infra-structures
– Security
– Healthcare
Participation
Accountability
Entitlements
Scaling Problems in Development
Technical and institutional challenges in developing countries are
really problems of scales:
• Spatial scales: The inability to monitor and maintain
geographically extent infrastructures (e.g. the world’s largest
contiguous irrigation network running over tens of thousands of
km of open channels)
• Time scales: The inability to collect information, reconfigure,
and react within short time spans (e.g. irrigation warabandi
rosters, issued once in a cropping season despite the fact that
water demand and supply varies over much shorter time spans)
• Human scales: The inability to scale human expertise across
institutions (e.g. farmer organization roles in relationship to
irrigation officials for maintaining channels, ensuring equity,
collecting abiana [water fees], etc.)
Robotics, AI, control and automation may be the answer to some
of these!

Final Observation on Scales (Ag Robotics)
• Booming population, urbanization.
• Average farm size in Pakistan going down.
• Can we empower the poor?
1960 2000
Conclusions and Outlook
• Water problems can inspire a range of ICT inspired
systems engineering, informatics and systems
analysis solutions.
• Canal inspection is an interesting structural
inspection problem with an important and unique
socio-economic context for Pakistan.
• The solution would require substantial improvements
to the state of the art, both in theory and practice.
• Aerial robotics is an emerging area due to recent
availability of development platforms.

References
– Gul-I-Ryna, Abubakr Muhammad, ”Silt Removal from Irrigation
Canals in Punjab”, Technical Report, LUMS, 2013.
– Talha Manzoor, “Sedimentation and Silt Cleaning in Waterways .“
Presentation at WFAR6, 2014.
– Hamza Anwar, Abubakr Muhammad, Karsten Berns, “Towards
Performance Limits of Aerial Canal Inspection” (under review)
– Hamza Anwar, Syed Muhammad Abbas, Abubakr Muhammad,
Karsten Berns, "Volumetric Estimation of Contained Soil using 3D
Sensors", 3rd International Commercial Vehicle Technology
Symposium (CVT), Kaiserslautern, Germany, 2014.
– Lab website cyphynets.lums.edu.pk
Recommended

















