![Page 1: [IEEE 2005 International Conference on Neural Networks and Brain - Beijing, China (13-15 Oct. 2005)] 2005 International Conference on Neural Networks and Brain - H>inf/inf](https://reader037.pdfslide.us/reader037/viewer/2022092716/5750a6d01a28abcf0cbc5bf5/html5/thumbnails/1.jpg)
H. Feedback Control of Fuzzy Singular Perturbed System
Fuchun Sun, Ni Zhao, Huaping Liu
Department ofComputer Science and Technology, Technology, Tsinghua University, Beijing 100084email: chunshengimail.tsinghua.edu.cn, n-zhaoW3e mails.tinghua.edu.cn
Abstract In this paper, we design a reduced-order observer for the fiuzy singular perturbed system. Based on this, an H..feedback controller is developed and the design problem is further transformed into solution of some Linear Matrix Inequalities.The stability of the whole system is also proved. To demonstrate the feasibility and effectiveness of the proposed approach, wepresent the application to the control of a single flexible-link manipulator.
Keywords fuzzy singular perturbed system, ftizzy reduced-order observer, H. feedback control, single flexible-linkmanipulator.
1. Introduction
Multi-timescale dynamics generally exist in the field ofelectronics, industry process and flexible manpulators. It'swellkown that the ill-conditioned dynamics in multi-timescalechalleages the analysis of the system. In the past, the fastmodes were simply ignored, which made the model-basedcontroller far from satisfactory in some cases. However, theycan be efficiently dealt with by singular perturbation theory,which describes the motion of quick and slow variables indifferent time scales. [1][2] provide summaries of this topic.
Traditionally, in the strategy of singular perturbation, thewhole system is further decomposed into two reduced-ordersubsystems, representing the motion of quick and slowvariables respectively. However, such decomposition isdifficult in non-standard situations, which makes many
researchers study the general system instead, so as to unifythe treatment with standard or non-standard situations.
Recently, a great deal of research in singular perturbedsystem is focused on linear cases [3]-[7] while rather little onH. control of non-linear systems. [10] does study the latter,but with the restriction that non-linear items should befunctions of slow variables. [11] is on the robot control ofnon-certain time delay systems while [12] takes the method ofself- adaption. Generally speaking, these strategies haverestrictions on system structures and are mainly in the case ofaffined non-linear systems.
It is shown in recent years that intelligent control playsan important role in non-linear system control. Fuzzy singularperturbed system is just the outgrowth of the marriage offuzzy systems and singular perturbation strategy. Essentially,it is through series of locally linear singular perturbationsystems, blended with fuzzy membership functions, to
represent the complex non-linear singular perturbed system.
Thus, with such representation and the help of parallel
0-7803-9422-4/05/$20.00 C2005 IEEE1761
distribution compensation(PDC)[13], we can exploit the fruitof modem control theory in the case of non-linearmulti-timescale systems.
In this paper, we study the H. feedback control of fuzzysingular perturbed system. We design a reduced-orderobserver for the fast variables. Based on this, an H. feedbackcontroller is developed and the stability of the closed-loopsystem is proved. Then the design problem is fuithertransformed into solution of some linear matrix inequalities(LMIs), which can be solved efficiently by matlab LMItoolbox. On the other hand, we have proved that flexiblemanipulator, which is a multi-timescale nonlinear system, canbe approximated by fizzy singular perturbed model toarbitrary accuracy in any finite time interval. So, todemonstrate the feasibility and effectiveness of the proposedapproach, we present the application to the control of a singleflexible-link manipulator.The paper is organized as follows. In section 2, the feedbackclosed-loop system is deduced. Section 3 gives the H. controlalgorithm for the above system and its corresponding LMIs.An Application example is presented in section 4. Finally,section 5 concludes the paper.
2. Feedback Closed-loop System
2.1 Fuzzy Singular Perturbed System
The system consists of a collection of fizzy IF-THENrules.Rulei: if Xlt1i(t)is x2t) is Mi2
then
[xlt) = Al I A12 ] xl()]+ [B u(t) (l)L. (tj[L-11 422 JLx2(t)J [L 2 J
where i= 1,2, ...r xl (t) are slow variables and
x2 (t) are fast ones. Mifi, M,2 are multi-dimension fuizzy
![Page 2: [IEEE 2005 International Conference on Neural Networks and Brain - Beijing, China (13-15 Oct. 2005)] 2005 International Conference on Neural Networks and Brain - H>inf/inf](https://reader037.pdfslide.us/reader037/viewer/2022092716/5750a6d01a28abcf0cbc5bf5/html5/thumbnails/2.jpg)
sets. U(t) is the input control. £ > 0 is a small parameter, represents the unitary weight of rule i, then we have:
usually reflecting the ratio oftwo time scales. hi (x) = Wi (x) / w, (x)Assumption 1:
The rank of Wi (x) = Mil (X)Mi2 (x)
[(Aji2)T (A4A22)T (A42(A 2)n l)T]T Replacing (1) with (5) (8) and using product inferen
is n , which is the number of quick variable s, and centroid defuzzification, the closed loop system is as fi =1,2,** r . (w(t) is noise):2.2 TS Reduced Order Observer [ i(t)1x (t)
In practice, fast variables are usually difficult to measure, [X2 (t) _ E hi (v)hj (V) Qij x2 (t) + aso the TS reduced order observer for them is needed. From -e2(t) j e2 (t)(1), the state and output function of X2 (t) in rule i can be where:deduced as follows: A1i -BK/ 4'2 - BK2 BJ'K2
£X2()=A21x1(t)+X22x2(t)+B2 u(t) (2) Qi = - B2Klj 'K2 B2K2
All2x2(t) = XI(t)-A1x (t)-AB,u(t) (3) [ ° 0 A22 -Thus the TS reduced order observer for the fast variables is:
Rule i: if xl (t) is M 4x2 (t) isMB 2 3. H Controlthen According to (9), the influence given by the obser
2X2 (t) = A'2I2 (t) +Al1XI (t) + B0u(t) controller on the system stability is independent of eac2
+ K (Al2x2(t)- Al22(t)) which inspires us to design them respectively an(freoR^ ho Aor;t ;^+nT \XTo,
ce and
follows
w(t)
(9)
ver andh other,d then
where i, M-1 ^ Mi2 are the same as above. Ke and
X2(t) are respectively the gain matrix and output of the
observer. By (2)- (4), the observer error in rule i can be got
as:
8e2 (t) = £(X2 (t) X-2 (t))= (A42 -KeA2) e2(t)
However Xi (t) in (3) can't be measured directly, to
improve accuracy, we proceed the following transformation.
let £17(t) = 6X2 (t) - Kexl (t)
£5(t) = £X2 (t)-Kx1 (t) (6)Replacing (4) with (3), (6), we have:
ez7(t) = (42 - KeA2 )91(t) + (B2 -KeBl )U(t) +(£Ke (A42 -Ke'AlI2 ) + 41-KeiAl', )XI (t) (7)
2.3 The Feedback Closed-loop System
The fuzzy controller with PDC is assumed in the followingform:
Rule i: if Xl(t) is Mil, X2(t) is Mi2then:
u(t) = -K'X(t)=-[Kl K'] i)] (8)
To any given state x A [4 (t) x2T (t)]T , let h, (X)
Eranlsiorm lne aesign lIn10 LMIS.
3.1 Design the Feedback Matrix of the Observer
As stated above, the observer error for each subsystem isgiven in (5). Therefore, in light of assumption 1, for everylinear subsystem, the fast variables are observable, whichenables us to design Kei by pole placement.
3.2 Design the Feedback Matrix of the Controller
According to 3.1, we can make e2 (t) approach to
zero much faster than XI (t) , X2 (t) do, through pole
placement. Thus (9) can be simplified as
01()] =E Ehi (v)hj (v)Mij ( ) + w(t)
whereM =[Ai - BiK Ki =[Kl K]
AA'l 12]2 (' 1
Theorem 1: For the above system (10), if there exists acommon positive symmetric matrix P satisfying:
]T 1T[A' -BivK2P+P[A'-B'K']+ 12 PP+Q<0 (I1[A -B Kj + Aj - BjK ]TP + 2 PP+2Q
r' (12)+PA't -BsKt + As - BjKi <sb i < j
then the system is asymptotically stable and the H.>1762
![Page 3: [IEEE 2005 International Conference on Neural Networks and Brain - Beijing, China (13-15 Oct. 2005)] 2005 International Conference on Neural Networks and Brain - H>inf/inf](https://reader037.pdfslide.us/reader037/viewer/2022092716/5750a6d01a28abcf0cbc5bf5/html5/thumbnails/3.jpg)
performanceIT
{x (t)Qx(t)} dt < Y2 IT
{w (t)w(t)} dtis granted.Proof: See appendix.
3.3 Conversion of the Design to LMIs
Theorem 1 shows the sufficient conditions in achieving
H. control. In this part, we will convert them to linear
matrix inequalities, which can be efficiently solved by matlab
LMI toolbox. For condition 11, we multiply P1 on each
side of it. Then definingX = P1 , M, = K.P- and
using schur complement, we can get its corresponding LMI.
The treatment to condition 12 is just the same. So we have:
Theorem 2: The following LMI (13) (14) are equivalent to
condition (11) (12) respectively:
hi X
}< (13)
A XT (A')T + A'X _ (Mi)T (B')T - B'M' + I
FAx -2Q1 JI
(14)Ai =XT(Ai +Aj)T +(Ai +Aj)X+2 I
-(MiT (B')T - B'M - (M')T (BJ) - BjM'In (13) (14) X =P-, M' = K'X.
4. An Application Example
The theories developed above are now applied to thesingle-link flexible manipulator, the singular perturbed modelof witch are given as follows (with one fast mode):
Eg jg L(x,u) (15)
-~ _L2(XIu)j
where q is the angle of the manipulator and S is the firstfast mode with
Y1 = /£2, Y2=3/8,E6=[L I]
£=(/(ri+r2)K2) , x-[q 4 Y1 Y2]And
L(X,U) m11 ml]2 L -D24+uL2(x, U)I m21 M22 -h2 -D2-Y2 +K2_uY
wherel11=Irl + r2 +r316 YI,i21 =rn12 =P1 + P2m, IM22 =2q+q2m1,
222m1qe3y1Y2, h2 =_-2m1 2 2y.The parameters rl, Ir2 r3> P1, P2, ql,q2,.A andthe
payload mass ml are all assumed to be known.
4.1 Derivation of the Fuzzy Singularly Perturbed TSModel
First, we make the following approximation forsimplicity:
A = (r, + r2+r3m152)m22 -m12m21(ri + r 2)m22 -m12m21
Then after constructing switching TS fuzzy model [14] of (15)and deleting the items containing £ or above degree, weget the following Fuzzy Singularly Perturbed TS Model:Let a=qRule i: if a is
Then
(t) o -D1M22** m22 j U
( K-Ml2(A Mlbi -K2)- ,\ m12D2 *ivc
Dlm12 [12- (16)
0 1[s(1gm,b, -K2). - £62 -sD2 * ]
where i =1,2,s= +r2,=brI= = 2, b2 =42. Aiare fuzzy sets, whose membership functions are as follows:
a a1 .2 A=1- 2
4max qmiax
4.2 H. Design
Through pole placement, the observer feedback matrix foreach linear subsystem is got as follows:
[0 22.51721 2 0 20.50251K' =1 K =e 0 32.167 e L0 28.3431jThen using LMI (13) (14) and matlab LMI toolbox, we get
controller feedback matrix for each linear SingularlyPerturbed subsystem in (15) as:
1763
![Page 4: [IEEE 2005 International Conference on Neural Networks and Brain - Beijing, China (13-15 Oct. 2005)] 2005 International Conference on Neural Networks and Brain - H>inf/inf](https://reader037.pdfslide.us/reader037/viewer/2022092716/5750a6d01a28abcf0cbc5bf5/html5/thumbnails/4.jpg)
0
-0. 1
-0.3
-0.410 20
(b)I
40 60t(s)
80
(d)0.3
0.2
0.1
0O,f-0.1I
0 20 40 60 80t(s)
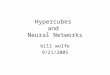
Fig. 1 Simulation Results: H,, control ofa single-link flexible manipulator
(a) q (rad), (b) q (rad/s), (c) (m), (d) 6 (m)
1.7660 4.0289
4.0289 11.1888P=
-0.2956 -0.8615
0.9230 2.5573
K1 = - [-56.8986 -159.0901
K2 = - [-55.8070 -156.0630
-0.2956
-0.8615
0.1207
-0.1728
19.8172
19.5655
0.9230
2.5573
-0.1728
0.6129]
-29.3450]
-28.6320]
We use rj = 0.9497, r- = 1.44, r3= 4.00,
pm=0.9983, p2 =2.00, q1=1.5035,
q2 = 4.00,A = 2.00, D1 = 0.59,
D2= 0.40, m,=0.5, ,=1,8 =0.2, d =1.Q=O.1I, Q1=Q,=O.1I, y=12,w(t) = 0.Olsin(20rt) .
Finally embed the above feedback matrix into the form ofobserver (7) and controller (8). Fig. 1 shows the simulationresult for regular control.
5. Conclusion
In this paper, we design a reduced-order observer for -the
fuzzy singular perturbed system. Based on this, an -H.feedback controller is developed and the design problem isfurither transformed into solution of some Linear Matrix
Inequalities. The stability of thLe whole system is also proved.We present the application to the control of a singleflexible-link manipulator to demonstrate the feasibility andeffectiveness ofthe proposed approach.
References
[1] D.S.Naidu, A.J.Calise, "Singular perturbations and timescales in guidance and control of aerospace systems: Asurvey", J.of Guidance, Csontrol and Dynamics, 2001, 24
(6): 1057-1078.[2] KeKang Xu, Singular Perturbation in Control System,
Science Publishing Company, 1984.[3] P.V.Kokotovic, R.A.Yacel, "Singular perturbation of
linear regulators: Basic theorems", IEEE Trans on Autom.Contr. 1972,17:29-37
[4] W.C.Su, Z.Gajic, and X.NI{.Shen. "The exact slow-fastdecomposition of the algebraic Riccati equation ofsingularly perturbed systeTns", IEEE Trans on Autom.Contr. 1992, 37(9):1456-1459
[5] S.Boyd, L.El.Ghaoui, E.Feron, V.Balakrishnan, LinearMatrix Inequalities in System and Control Theory,Phiadelpjia, PA:SIAM, 1994
[6] GGarcia, J.Daafouz, and J.Bernussou. "A LMI solution
1764
0.4
0.3q
(a)
k .
6080,
80
0.2
0.1
C
nnL
0.02
0.01i
0
-0.01-0
20 40t(s)
(c)
20 40t(s)
60 80
u.3,
v.vv,1
-
I.
![Page 5: [IEEE 2005 International Conference on Neural Networks and Brain - Beijing, China (13-15 Oct. 2005)] 2005 International Conference on Neural Networks and Brain - H>inf/inf](https://reader037.pdfslide.us/reader037/viewer/2022092716/5750a6d01a28abcf0cbc5bf5/html5/thumbnails/5.jpg)
in the H2 optimal problem for singularly perturbedsystems", in: Proc oftheACC., 1998, pp.550-554
[7] Y.Li, J.L.Wang,CGH.Yang, "Sub-optimal linaear quadraticcontrol for singularly perturbed systenas", irn: Proc ofCDC, 2001, pp.3698-3703
[8] Y.Y.Wang, S.J.Shi, and Z.J.Zhang. "A descriptor systemapproach singular perturbation of linear regulators",IEEE Trans. on Autom. Contr. 1988, 33(4) :3 70-373.
[9] H.Xu, H.Mukaidani, and K.Mizukami. "`New rmethod forcomposite optimal control of singularly perturbedsystems", Int.J.Sys.Sci., 1997, 28(2):161- 172
[10]Z.Pan, T.Basar, "Time-scale separation arid robustcontroller design for uncertain nonlinear singularlyperturbed systems under perfect state measurements",Int.J.Robust andNonlinear Control. 1996,6: 585-608
[11]Y.J.Sun, J.S.Cheng, J.GHsieh, "Feedback control of aclass of nonlinear singularly perturbed systems with timedelay", Int.J.Sys. Sci., 1996,27(6):589-596
[12]R.A.Al-Ashoor, K.Khorasani, "A decentralized indirectadaptive control for a class of two-time-scale nonlinearsystems with application to flexible-joint manipulators",IEEE Trans. on Industrial Electronics, 1999,46(5): 1019-1029
[13] M.Sugeno and GT.Kang, "Fuzzy Modeling and controlof Multilayer Incinerator," Fuzzy Sets Syst., No.18, pp.329-346, 1986.
[14] S.Kawamoto et al., "An Approach to Stability Analysisof Second Order Fuzzy Systems, " Proceecdings of FirstIEEE International Conference on Fuzzy Systems, vol.1,1992, pp.1427-1434.
Appendix: The Proof of Theoremui 1
Define Lyapunov function as:
V(x(t)) = xT (t)Px(t) (A.1)Differentiating (A.1) results in:
d V(x(t)) = xJ(t)Px(t) + xT(t)Px(t)dt
= xT (t)E,[(Ai - BiKj )Tp +P(A -_3iKj)]x(t)i=+j=)
+W T (t)Px(t)+ xT (t)PwV(t)( A.2)
Integrate (A.2) from 0 to T and get:V(T) - V(O) =
J {xT(t)EE [(A - BiKj)Tp +P(Ai - i1)],.x(t)+wT (t)Px(t) + xT (t)Pw(t)} dt
As V(T) >O , V(O) =0, wehave:
fXT{x(t)0X(t)} dt <£{XT (t)B K[(A,-BJKJ)Tp+P(A -_BiKj) + Q]x(t)
+wT(t)Px(t) + xT (t)Pw(t)} dt
On the other hand,
wT(t)Px(t) + xT(t)Pw(t)-yw (t)w(t)_- XT(t)PPX(t)y
=-(P(t) -yw(t)) (-Px(t) -yw(t))Y Y
which means
wT (t)Px(t) + xT(t)Pw(t) < r2wT(t)w(t) +-2xT (t)PPx(t)7
so:
j{xT(t)Qx(t)}dt<
r r
g T() [(- B K1)T PBiKjTp +p( - BiKj)=1 dt
+7PP +Q]x(t) +y2w'T (tWkt d
If condition (1 1X(12) are satisfied, we have
r r
so: f{xT (t)Qx(t)} dt < j2 {wT(t)w(t)} dt
Further, consider W(t) =0, then:
- V(x(t)) = xT (t)Px(t) + xT (t)Pic(t)dt
r r
x (t)Z [(A - BiKj )TP +P(Ai- BiKj)]x(t)i=l j=l
As:r r
E [(A'i_ BKy )Tp+P(A,_-B!Kj)]i=1 j=1r r 1
<,[(Ai -BiKj)TP +P(Ai - BIKj)+ PP+Q< 0i=1 j=1
so:
d V(x(t)) <0dt
In sum, the system is asymptotically stable and the H.,performance
jT{xT (t)QX(t)} dt < r2 T{wT(t)w(t)} dtis granted.
1765
Recommended