Hybrid 4D EnVar for the NCEP GFS
Daryl Kleist1,3, Jeff Whitaker2, Kayo Ide3, and John Derber1
Lili Lei2,4, Rahul Mahajan1,5, Catherine Thomas1,3,5
1NOAA/NWS/NCEP/EMC2NOAA/OAR/ESRL/PSD
3University of Maryland4CIRES5IMSG
With acknowledgements to Dave Parrish (EMC), Ricardo Todling (NASA/GMAO), Xuguang Wang (OU), Ting Lei (OU) and many others
112th JCSDA Workshop – May 2014

Ensemble-Var methods: nomenclature
• En-4DVar: Propagate ensemble Pb from one assimilation window to the next (updated using EnKF for example), replace static Pb with ensemble estimate of Pb at start of 4DVar window, Pb propagated with tangent linear model within window.
• 4D-EnVar: Pb at every time in the assim. window comes from ensemble estimate (TLM no longer used).
• As above, with hybrid in name: Pb is a linear combination of static and ensemble components.
• 3D-EnVar: same as 4D ensemble Var, but Pb is assumed to be constant through the assim. window (current NCEP implementation).
2

3
EnKFmember update
member 2 analysis
high resforecast
GSIHybrid Ens/Var
high resanalysis
member 1 analysis
member 2 forecast
member 1 forecast
recenter analysis ensemble
Dual-Res Coupled HybridVar/EnKF Cycling
member 3 forecast
member 3 analysis
T254
L64
T574
L64
Generate new ensemble perturbations given the
latest set of observations and first-guess ensemble
Ensemble contribution to background error
covarianceReplace the EnKF
ensemble mean analysisand inflate
Previous Cycle Current Update Cycle
** Implemented into GDAS/GFS in May 2012

4D EnVar: The Way Forward ?
• Natural extension to operational 3D EnVar– Uses variational approach with already available 4D ensemble perts
• No need for development of maintenance of TLM and ADJ models– Makes use of 4D ensemble to perform 4D analysis – Modular, usable across a wide variety of models
• Highly scalable– Aligns with technological/computing advances
• Computationally inexpensive relative to 4DVAR (with TL/AD)– Estimates of improved efficiency by 10x or more, e.g. at Env. Canada (6x
faster than 4DVAR on half as many cpus)• Compromises to gain best aspects of (4D) variational and ensemble
DA algorithms• Other centers exploring similar path forward for deterministic NWP
– Canada (to replace 4DVAR later this year), UKMO (potentially replace En4DVar)

Hybrid 4D-Ensemble-Var[H-4DENSV]
5
Extension of 3D hybrid to 4D straightforward
Where the 4D increment is prescribed exclusively through linear combinations of the 4D ensemble perturbations plus static contribution
Here, the static contribution is considered time-invariant (i.e. from 3DVAR-FGAT). Weighting parameters exist just as in the other hybrid variants.
No TLM or ADJ.
K
kkkkkkkk
N
n
nn,J
1
1T
1
1T
ef1f
Tfff
2
1
2
1
2
1
dxHRdxH
αLαxBxαx
N
n
n
kn
k1
ef xαTxx

Single Observation (-3h) Examplefor 4D Variants
6
4DVAR
H-4DVAR_ADf-1=0.25
H-4DENSVf-1=0.25
4DENSVTLMADJ
TLMADJ
ENSONLY
ENSONLY

Time Evolution of Increment
7
t=-3h
t=0h
t=+3h
H-4DVAR_AD H-4DENSV
Solution at beginning of window same to within round-off (because observation is taken at that time, and same weighting parameters used)
Evolution of increment qualitatively similar between dynamic and ensemble specification
** Current linear and adjoint models in GSI are computationally impractical for use in 4DVAR other than simple single observation testing at low resolution
TLMADJ ENSONLY

8
Observing System SimulationExperiments (OSSE)
• Joint OSSE– International, collaborative effort between ECMWF, NASA/GMAO, NOAA
(NCEP/EMC, NESDIS, JCSDA), NOAA/ESRL, others– ECMWF-generated nature run (c31r1)
• T511L91, 13 month free run, prescribed SST, snow, ice• Observations from (operational) 2005/2006 observing system
developed– NCEP: ‘conventional’, sbuv ozone retrievals, GOES sounder radiances– NASA/GMAO: all other radiances (AMSUA/B, HIRS, AIRS, MSU)
• Older version of the CRTM• Simulated observation errors developed by Ron Errico
(GMAO/UMBC)– Horizontally correlated errors for radiances– Vertically correlated errors for conventional soundings
• Synthetic observations used in this study were calibrated by Nikki Prive (GMAO)
– Attempt to match impact of various observation types with results from data denial experiments

3D to 4D hybrid
9
• Model/Assimilation• NCEP Global Forecast System
(GFS) (T382L64; post May 2011 version – v9.0.1)
• 80 member EnKF, 25% static hybrid, additive/mult. inflation
• Test Period• 01 July 2005-31 August 2005 (3
weeks ignored for spin-up)
• Analysis Error Difference (August)• H-4DEnVar (With TLNMC)
minus 3D hybrid

500 hPa AC (against EC NR)
10

Constraint Options
11
• Tangent Linear Normal Mode Constraint (Kleist et al. 2009)– Based on past experience and tests with 3D hybrid, default configuration
includes TLNMC over all time levels (quite expensive)
N
n
n
kn
kk1
ef xxCx α
• Weak Constraint “Digital Filter”– Construct filtered/initialized state as weighted sum of 4D states
iimmmmdfi ,J xxxx
u
1
i h k
K
kmkm xx
• Combination of the two– Apply TLNMC to center of assimilation window only in combination with JcDFI
(Cost effective alternative?)

Analysis Error (cycled OSSE)
• Time mean (August) change in analysis error (total energy) relative to 4D hybrid EnVar experiment that utilized no constraints at all
• TLNMC universally better• Combined constraint mixed• JcDFI increases analysis error

Low Resolution GFS/GDASExperiments with real observations
13
• Basic configuration– T254L64 GFS, opnl obs, GFS/GDAS cycles 20120701-20121001
• PR3LOEX0– 3DVAR
• PRHLOEX1– Hybrid 3D EnVar, 80 member T126L64 ensemble with fully
coupled (two-way) EnKF update, slightly re-tuned localization and inflation for lower resolution, TLNMC on total increment, 75% ensemble & 25% static
• PRH4DEX1– Hybrid 4D EnVar, TLNMC on all time levels, only 1x150
iterations– Hourly TC relocation, O-G, binning of observations

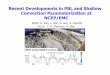
500 hPa Die Off Curves
14
Northern Hemisphere Southern Hemisphere
4DHYB-3DHYB
3DVAR-3DHYB
Move from 3D Hybrid (current operations) to Hybrid 4D-EnVar yields improvement that is about 75% in amplitude in comparison from going to 3D Hybrid from 3DVAR.
4DHYB ----3DHYB ----3DVAR ----
4DHYB ----3DHYB ----3DVAR ----

15

(Preliminary) Results and Comments
16
• 4D extension has positive impact in OSSE and real observation (low resolution) framework
• 4D EnVar does have slower convergence (not shown)• As configured, 4D EnVar was 40% more expensive
than 3D hybrid (caveats being different iteration count, low resolution and machine variability)– TLNMC (balance constraint) over all time levels
quite expensive– Lots of time spent in I/O, optimization will be
necessary prior to implementation.

(4D) Incremental Analysis Update
17
• In addition to TLNMC, we currently utilize full-field digital filter initialization in the GFS
– Can have undesirable impacts being a full field filter
• IAU (Bloom et al.) has been used at GMAO and elsewhere as alternative to DFI– Increment is passed to model throughout the window as a forcing term– However, this has typically been done using a 3D increment (rescaled) through the
window
• 4D EnVar lends itself to a minor modification of the IAU procedure to use the 4D increment
– This also provides a mechanism for passing the 4D solution to the model– Perhaps a way to help spin up/spin down of clouds, precipitation, etc.
• Promising preliminary results in EnKF context, work underway in 4D hybrid EnVar context

EnKF-IAU and EnKF-DFIEnKF-IAU noticeably better
18Courtesy: Lili Lei

2014 GFS/GDAS Implementation
19
• T1534 Semi-Lagrangian GFS (~13km), no change in vertical resolution– High resolution SST– Physics Changes– Full resolution to 10 Days
• 80 Member T574 SL GFS EnKF-based hybrid– Significantly reduce additive inflation with more
appropriate treatment of system uncertainty– Analysis on the ensemble grid and not T1534 grid– Observation improvements yielding significant gains in SH

Accounting for under-represented source of uncertainty
20
• Current operations – Multiplicative inflation – Helps compensate for finite-sized ensemble– Additive perturbations – Helps compensate for lack of consideration of
model uncertainty
• Proposed configuration for T1534 SL (3072 x 1536) GFS– Keep multiplicative inflation– Reduce additive perturbations from 32 to 5% – Add stochastic physics in model
• SPPT -- Stochastic Physics Perturbation Tendency• SKEB – Stochastic Energy Backscatter• VC – Vorticity Confinement• SHUM – Boundary Layer Humidity perturbations

21
Better spread behavior (2014042400)
• Current operations – Spread too large– Spread decays and
recovers
• Stochastic Physics– Spread decreased
overall (consistent with error estimates)
– Spread grows through assimilation window
3HR6HR9HR

Next Steps/Future Development
22
• Configure update and outer loop– Continue to investigate use of IAU to force 4D increment into model
• Replace all other initialization options? Get rid of TLNMC as well?
– Quasi-outer loop (rerun of nonlinear model as in 4D Var)– Lengthen assimilation (backward) in catch-up cycle
• May require temporal localization (code in place courtesy of OU collaboration)
• Test role of stochastic physics as replacement for additive inflation in 4D EnVar context
• Improved (or at least tuned) localization• Optimize static B for 4D hybrid
– Computationally (current static B is bottleneck in code)– Add temporal information (FOTO)– Weights, including scale-dependence– Increase role of ensemble (to 100%?)
• 4D EnVar tentatively scheduled to be part of GDAS/GFS upgrade in 2015

Beyond Initial Implementation
23
• Unification of DA (EnKF and GSI Hybrid) codes– EVIL – Auligne/NCAR – Mean-Pert – Lorenc/Met Office (ensemble of EnVars)– Can EnKF replace Var?
• VarBC for satellite assimilation• Physical space localization• Hybridization • Ease of implementation of noise control and balance equations
• Improve static B within 4D EnVar hybrid– Add temporal information without TLM/ADJ?
• Role of 4D hybrid on cloudy assimilation– Designing effective noise-control and balancing mechanisms– How to improve ensemble?
• Resolution• Ensemble size• Does stochastic physics provide enough spread in cloud, for example, or effective
assimilation?

Backup Slides
24

Hybrid ensemble-4DVAR[H-4DVAR_AD]
25
K
kkkkkkkkJ
10
1T00
1f
T00 2
1
2
1dxMHRdxMHxBxx
Incremental 4DVAR: bin observations throughout window and solve for increment at beginning of window (x0’). Requires linear (M) and adjoint (MT) models
K
kkkkkkkk
N
n
nn,J
10
1T0
1
1T
ef1f
Tfff
2
1
2
1
2
1
dxMHRdxMH
αLαxBxαx
Can be expanded to include hybrid just as in the 3DHYB case
N
n
nn
1ef0 xαTxx
With a static and ensemble contribution to the increment at the beginning of the window
ADJ
ADJ TLM
TLM

4D-Ensemble-Var[4DEnVar]
26
As in Buehner (2010), the H-4DVAR_AD cost function can be modified to solve for the ensemble control variable (without static contribution)
Where the 4D increment is prescribed exclusively through linear combinations of the 4D ensemble perturbations
Here, the control variables (ensemble weights) are assumed to be valid throughout the assimilation window (analogous to the 4D-LETKF without temporal localization). Need for computationally expensive linear and adjoint models in the minimization is conveniently avoided.
K
kkkkkkkk
N
n
nnJ1
1T
1
1T
2
1
2
1dxHRdxHαLαα
N
n
n
kn
k1
exαTx

Constraint impact (single case)• Impact on tendencies
• Dashed: Total tendencies• Solid: Gravity mode tendencies• All constraints reduce
incremental tendencies
• Impact on ratio of gravity mode/total tendencies• JcDFI increases ratio of gravity
mode to total tendencies• TLNMC most effective (but
most expensive)• Combined constraint potential
(cost effective alternative)
Recommended