FOUNDATION of MECHANICS 1FOUNDATION of MECHANICS 1
Presentation03: Kinematics analysis of mechanisms
Outline
• Four-bar linkage: introduction; velocity and acceleration analyses (graphical approach).approach).
• Crank-slider mechanism: position, velocity, and acceleration analyses (graphical and analytical approaches)(graphical and analytical approaches).
• General analytical approach: the matrix formulation.
• Elements for the analytical study of Relative Motions.
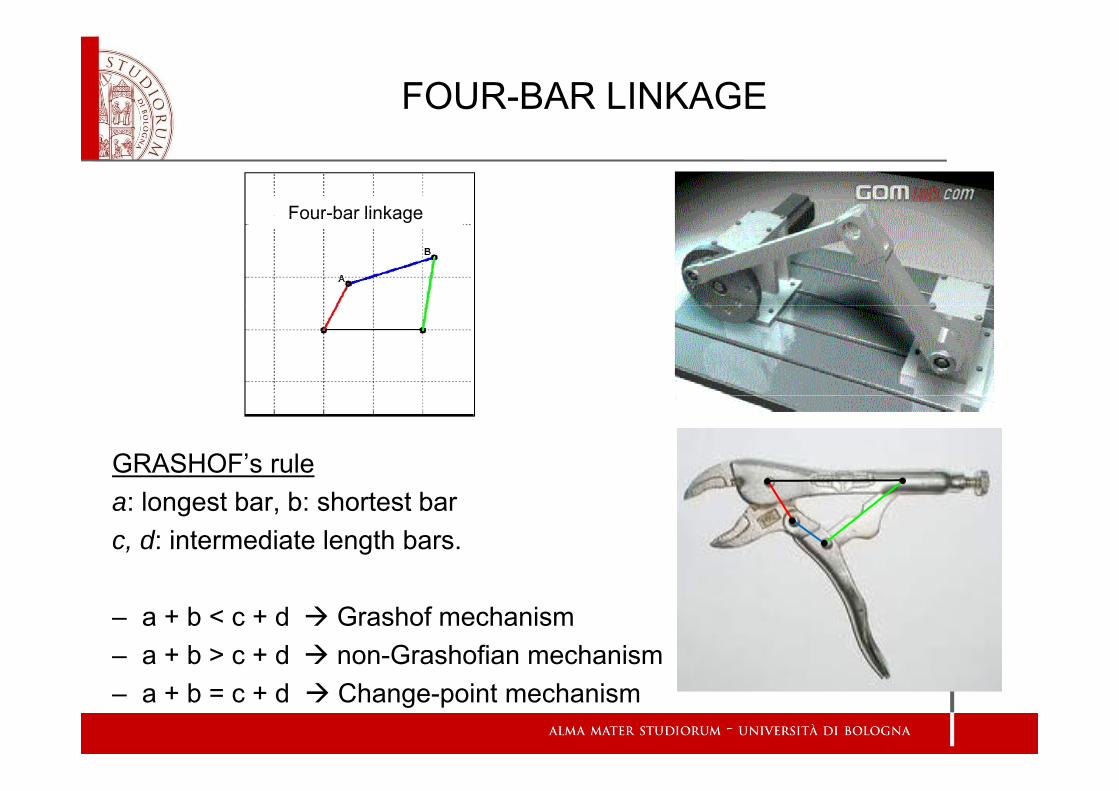
FOUR-BAR LINKAGE
Four-bar linkageFour bar linkage
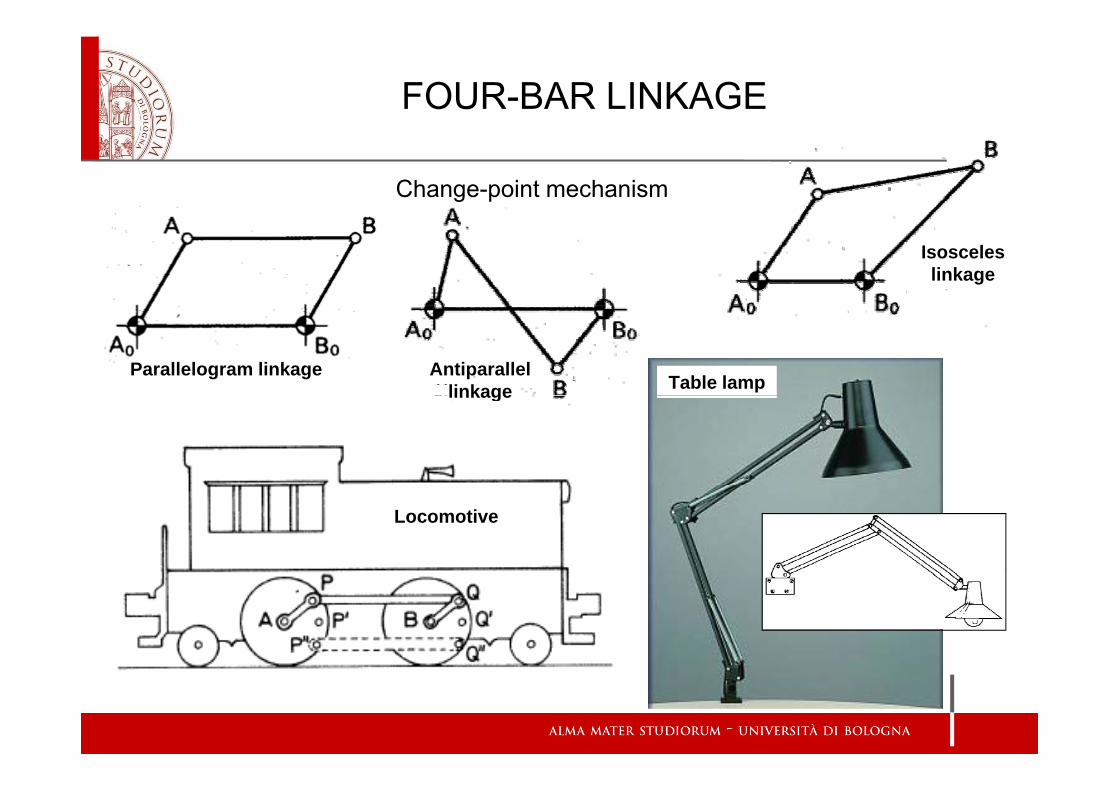
GRASHOF’s rulea: longest bar, b: shortest barc, d: intermediate length bars.
– a + b < c + d Grashof mechanism– a + b > c + d non-Grashofian mechanism – a + b = c + d Change-point mechanism
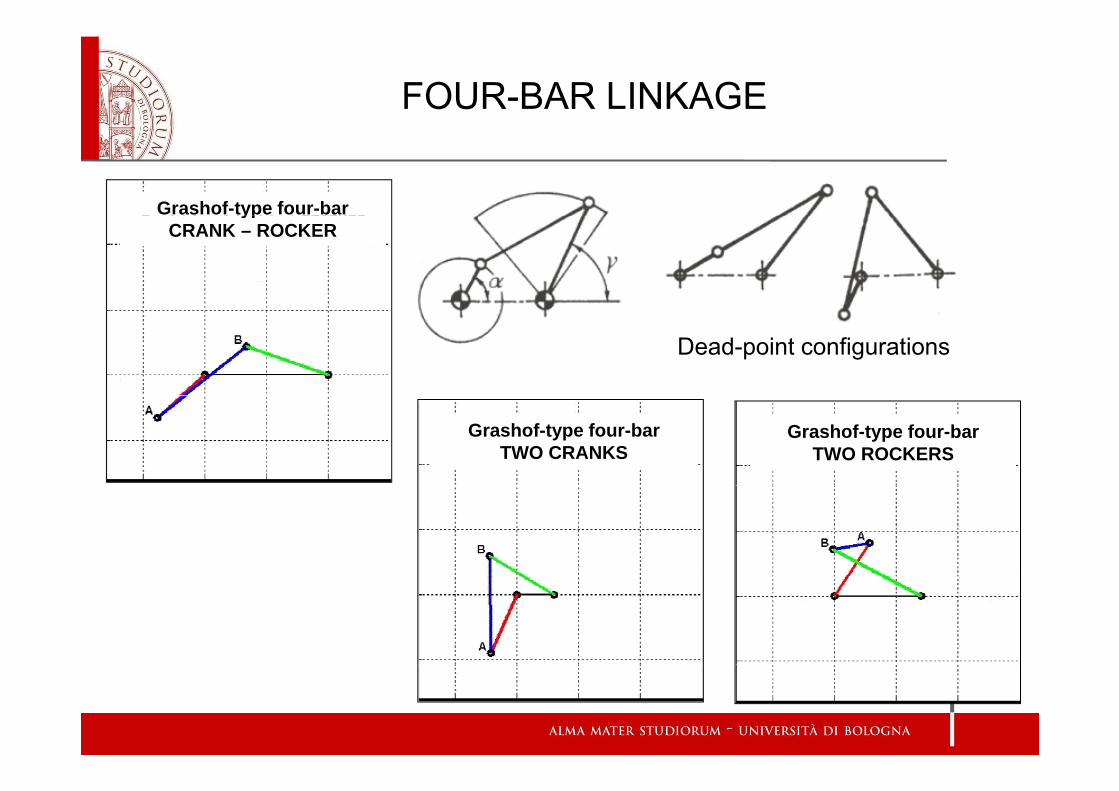
FOUR-BAR LINKAGE
Grashof-type four-barypCRANK – ROCKER
Dead-point configurations
Grashof-type four-barTWO CRANKS
Grashof-type four-barTWO ROCKERS
FOUR-BAR LINKAGE
Change-point mechanism
Isosceleslinkage
Table lampParallelogram linkage Antiparallel
linkagelinkage
Locomotive
FOUR-BAR LINKAGE
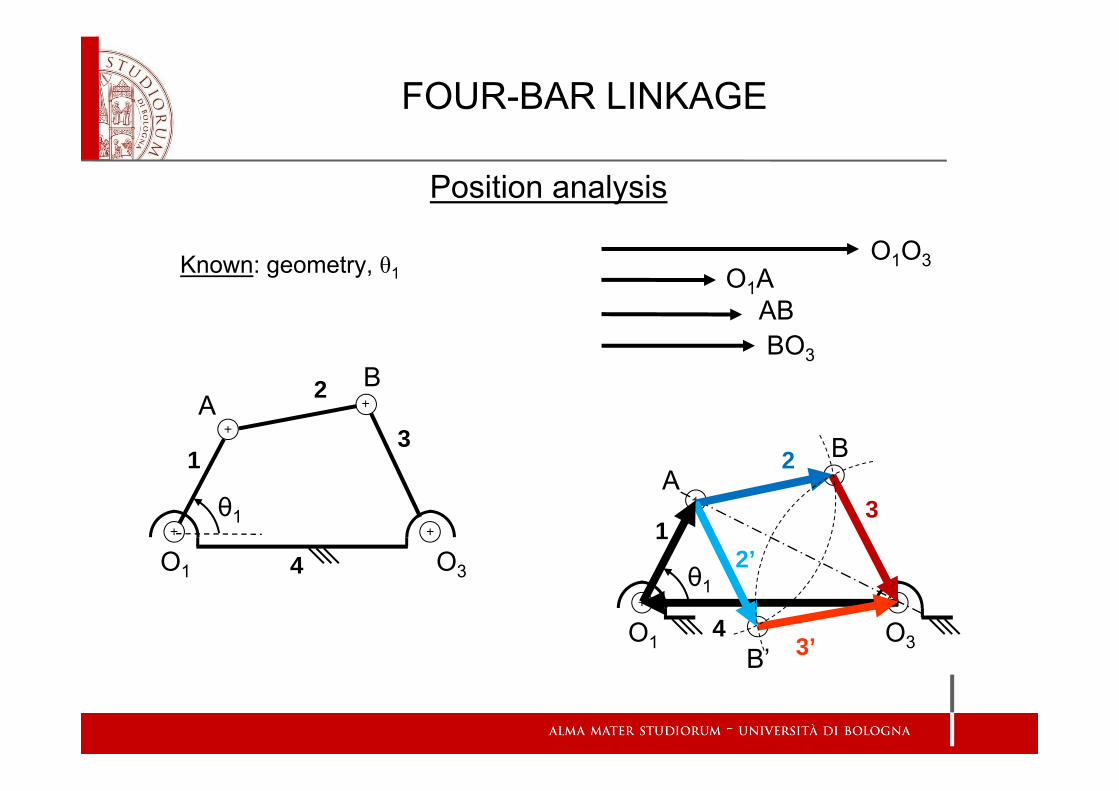
Position analysis
Known: geometry, θ1O1O3
O1AAB
2 BA
ABBO3
1
2
3A
2 BA
4
θ1
O1 O3
13
2’
A
θ1 3
4O1 O33’B’
θ1
B
FOUR-BAR LINKAGE
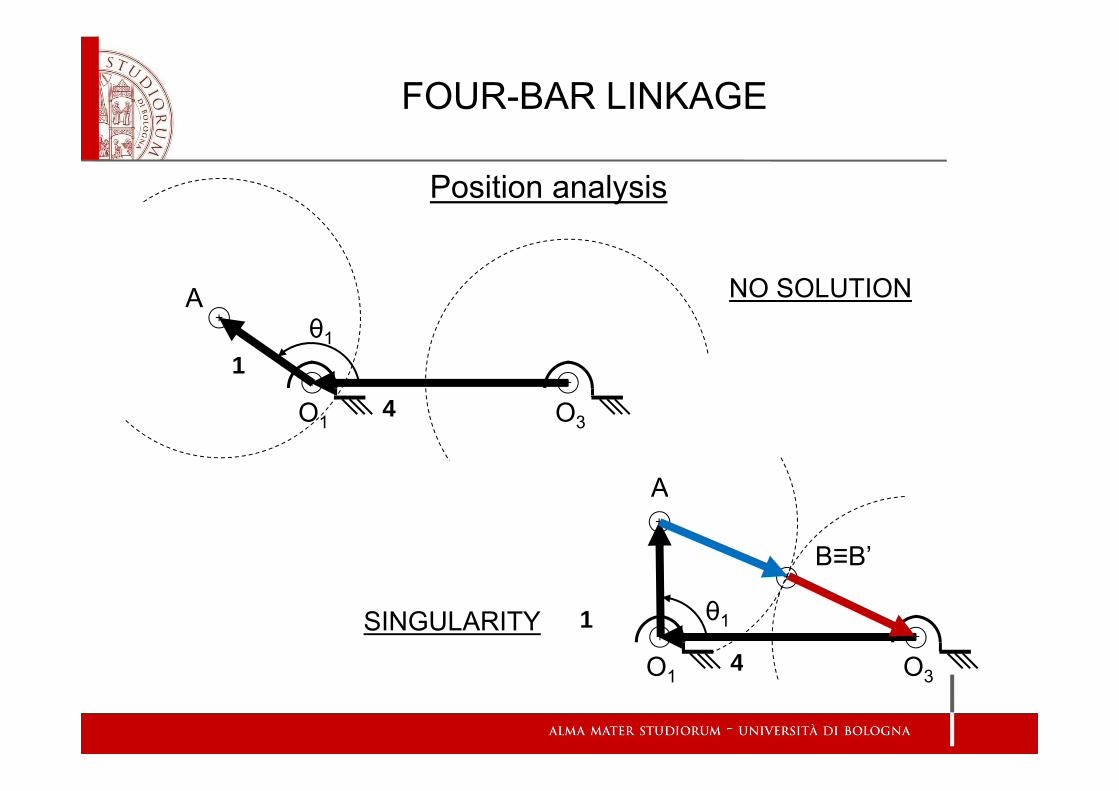
Position analysis
A NO SOLUTION
1
Aθ1
4O1 O3
AA
B≡B’
4
1
O O
θ1SINGULARITY4O1 O3
FOUR-BAR LINKAGE
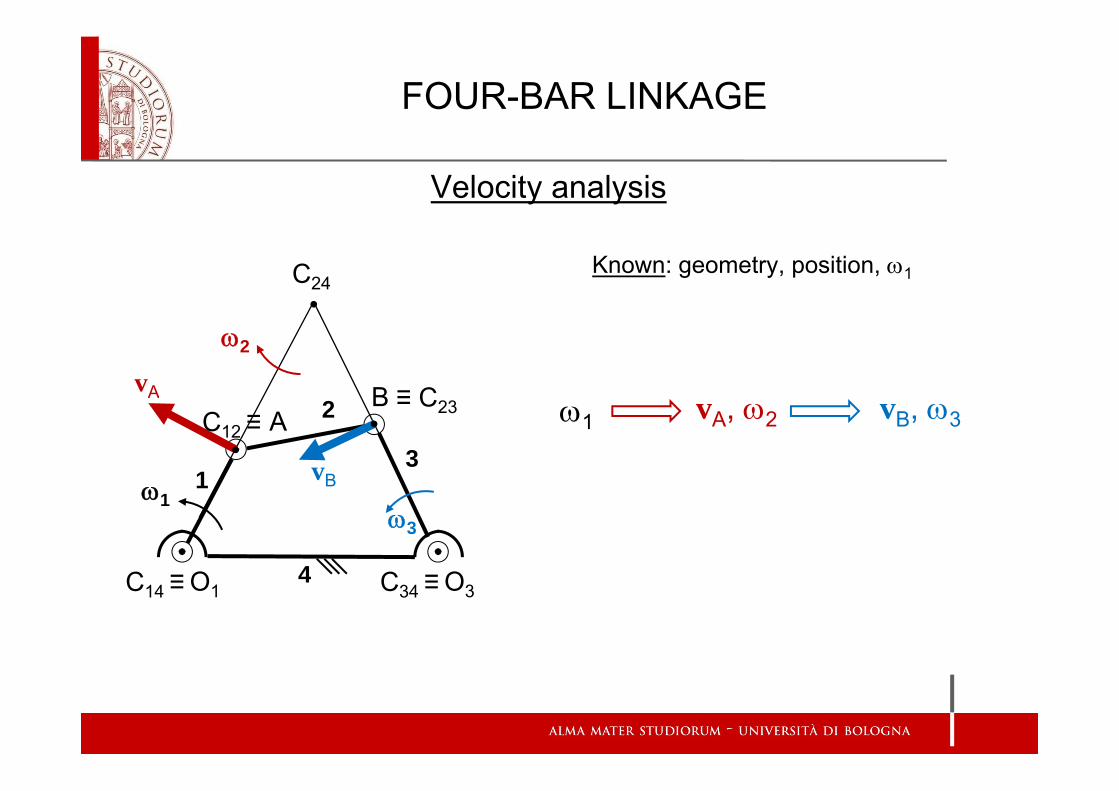
Velocity analysis
C24Known: geometry, position, 1
B
2
vA ≡ C
1
2
3
BA
A
vB
C12 ≡≡ C23 1 vA, 2 vB, 3
C ≡4
11
O
3
B
C ≡ OC34 ≡4O1C14 ≡ O3
FOUR-BAR LINKAGE
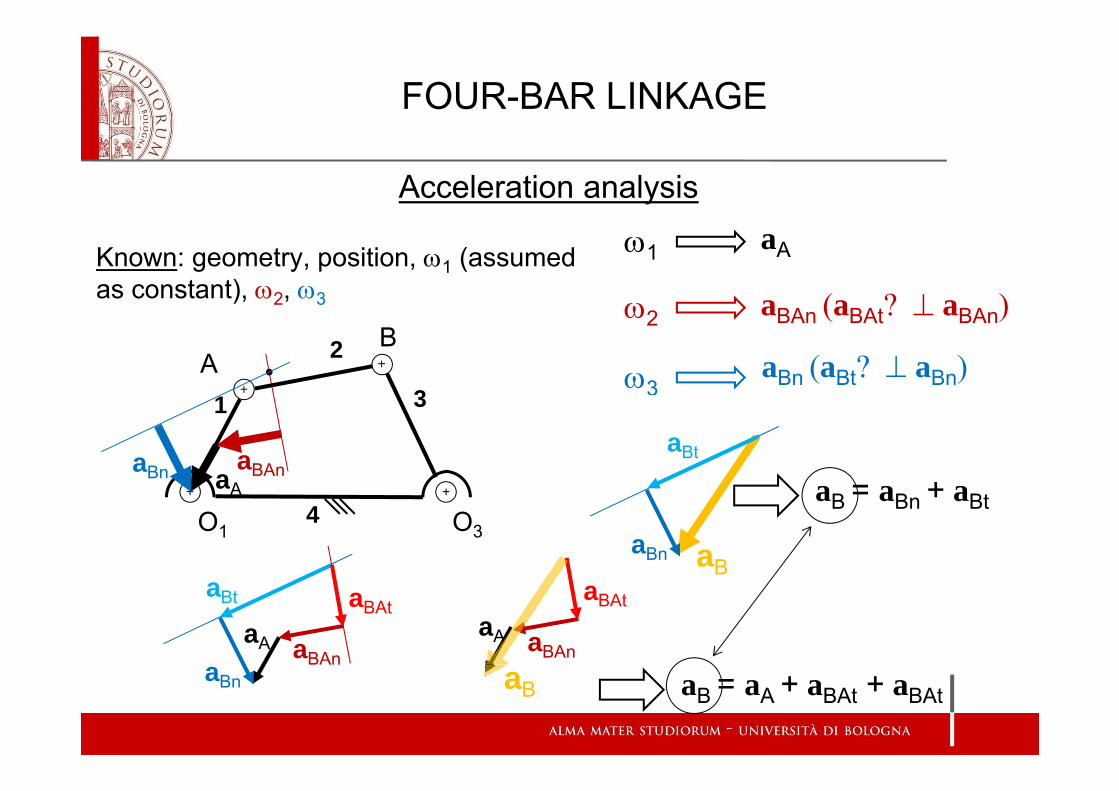
Acceleration analysis
1 aA
a (a ? a )Known: geometry, position, 1 (assumed as constant), 2, 3
2
3
BA
2 aBAn (aBAt? aBAn)
3aBn (aBt? aBn)
1 3
aAaBAnaBn
aBt
= +4O1 O3
aA
aBaBn
aB = aBn + aBt
aA aBAn
aBt aBAtaA aBAn
aBAt
aBn aB aB = aA + aBAt + aBAt
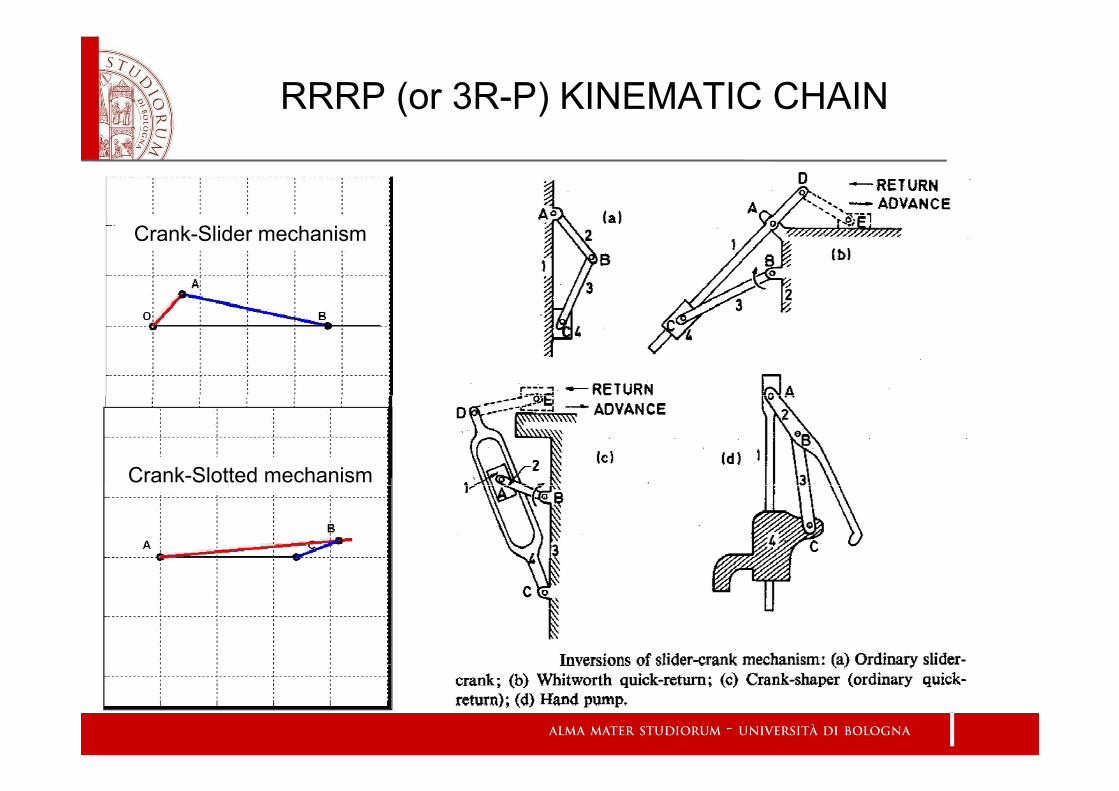
RRRP (or 3R-P) KINEMATIC CHAIN
Crank-Slider mechanism
Crank-Slotted mechanism
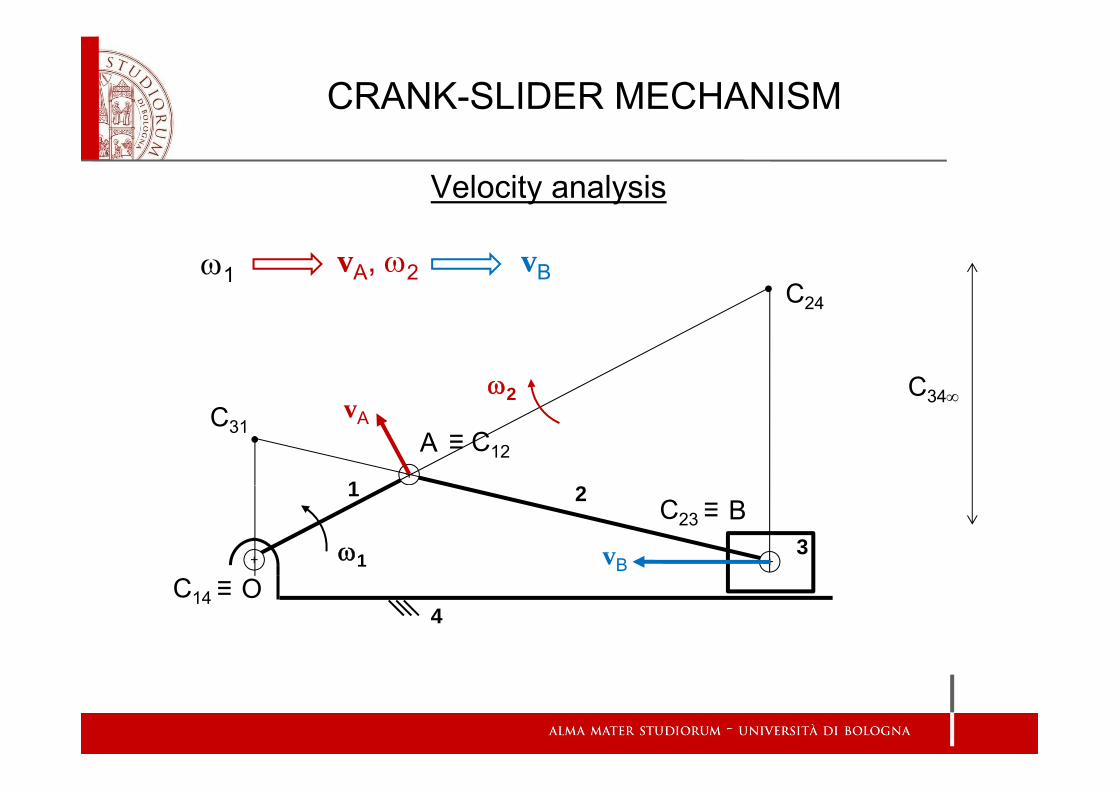
CRANK-SLIDER MECHANISM
Velocity analysis
C24
1 vA, 2 vB24
C342
A
1
≡ C12
C34C31
2vA
B1 2
3C23 ≡
1 vBO
4C14 ≡
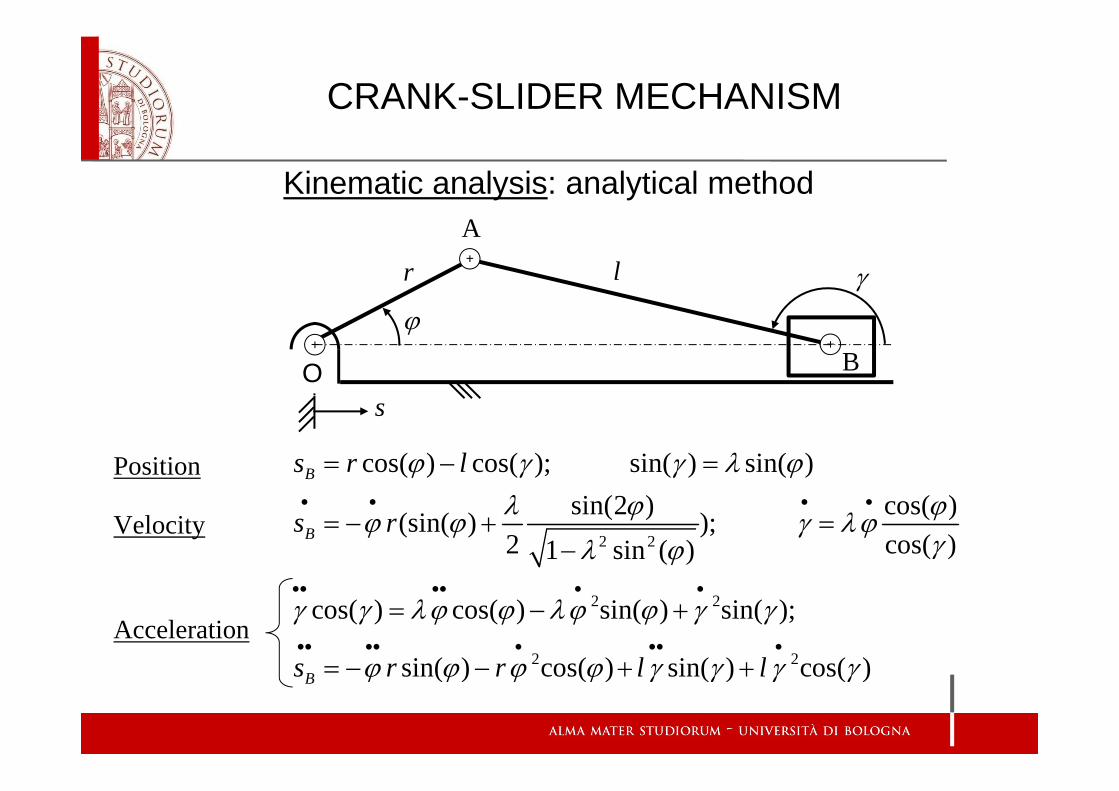
CRANK-SLIDER MECHANISM
Kinematic analysis: analytical methodA
lr
O B
s
cos( ) cos( ); sin( ) sin( )Bs r l Position
2 2
sin(2 ) cos( )(sin( ) );2 cos( )1 sin ( )
Bs r
Velocity
2 2
2 2
cos( ) cos( ) sin( ) sin( );
sin( ) cos( ) sin( ) cos( )s r r l l
Acceleration
sin( ) cos( ) sin( ) cos( )Bs r r l l
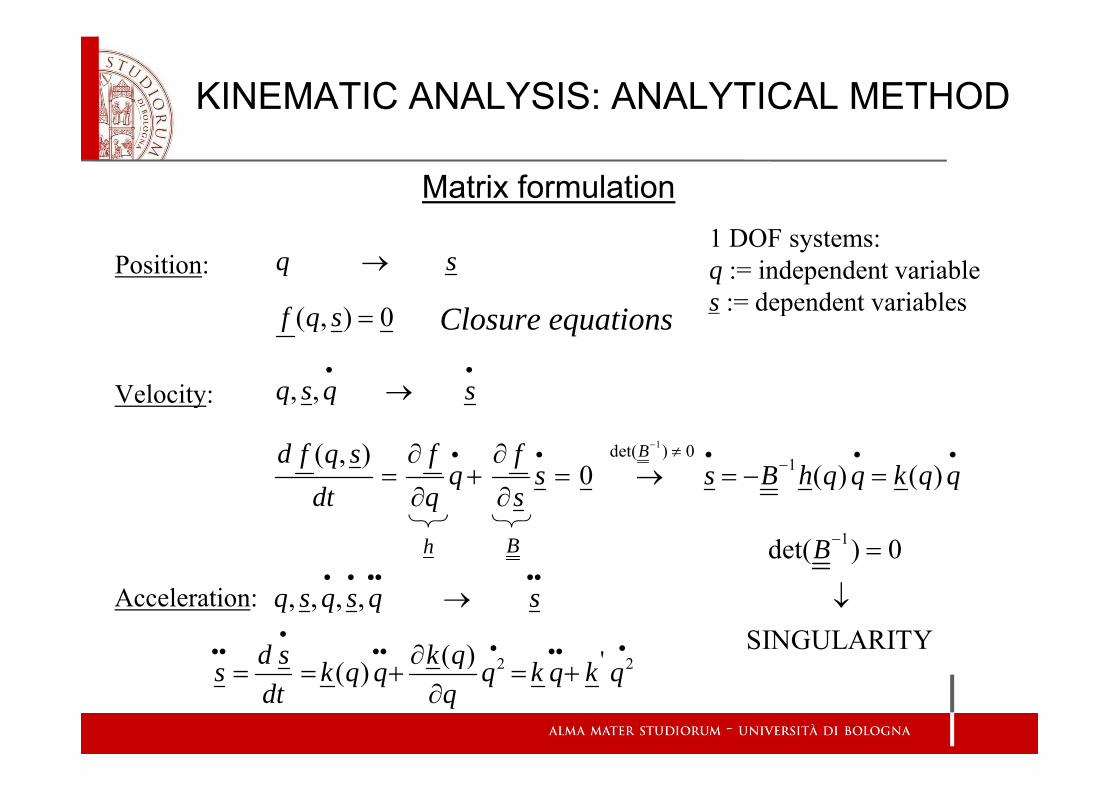
KINEMATIC ANALYSIS: ANALYTICAL METHOD
Matrix formulation
Position: q s1 DOF systems:q := independent variables := dependent variables( , ) 0f q s
Velocity:
Closure equations
q s q s
s : dependent variables
Velocity:
1( , )0 ( ) ( )
d f q s f fq s s B h q q k q q
, ,q s q s
1det( ) 0B
( ) ( )q q q q qdt q s
Bh
1det( ) 0B
Acceleration:
2 2'( )( )d s k qk k k
, , , ,q s q s q s
SINGULARITY
2 2( )( ) qs k q q q k q k qdt q
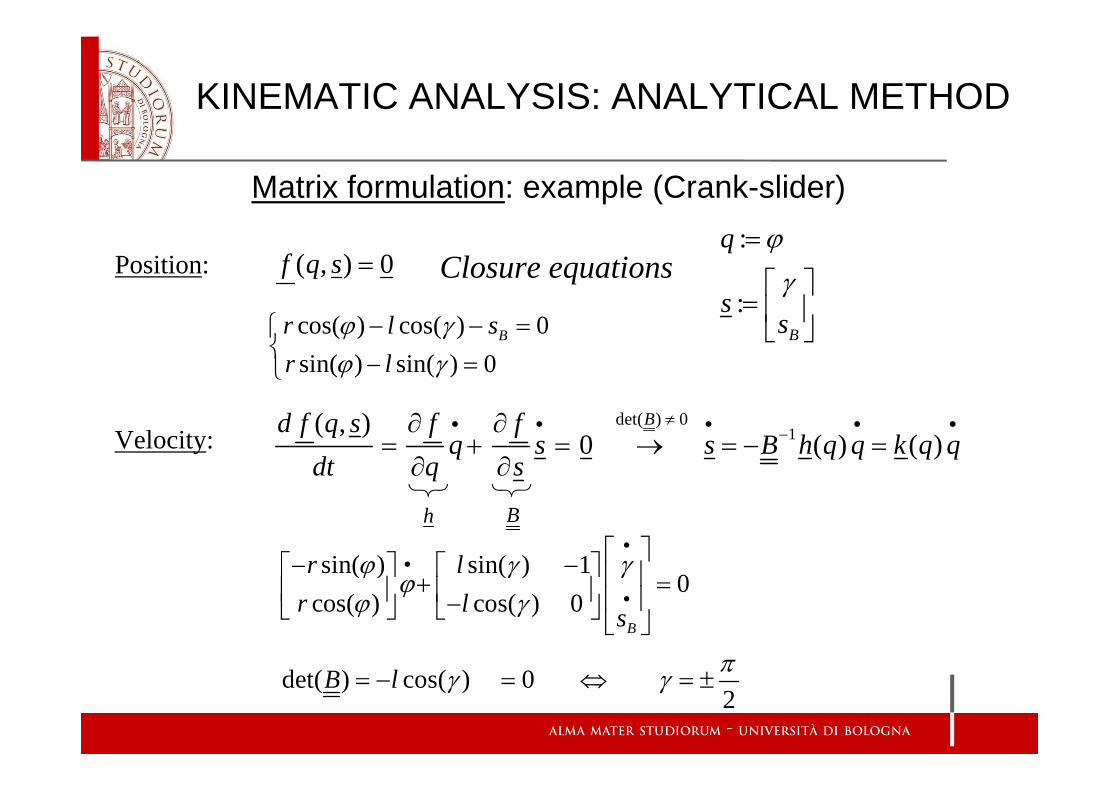
KINEMATIC ANALYSIS: ANALYTICAL METHOD
Matrix formulation: example (Crank-slider)
( , ) 0f q s Position: Closure equations:
:
q
s
cos( ) cos( ) 0
sin( ) sin( ) 0Br l s
r l
:B
ss
Velocity: 1( , )0 ( ) ( )
d f q s f fq s s B h q q k q q
dt q s
det( ) 0B
Bh
sin( ) sin( ) 10
r l
( ) ( )0
cos( ) cos( ) 0B
r l s
det( ) cos( ) 02
B l
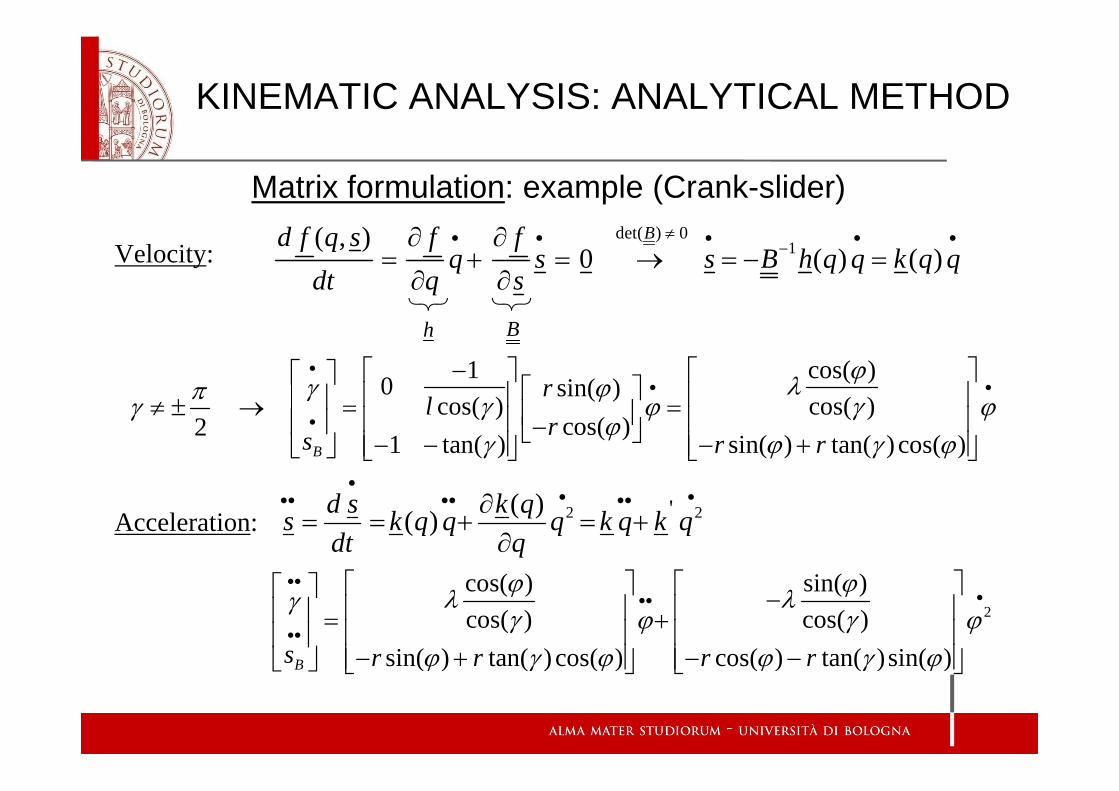
KINEMATIC ANALYSIS: ANALYTICAL METHOD
Matrix formulation: example (Crank-slider)
Velocity: 1( , )0 ( ) ( )
d f q s f fq s s B h q q k q q
dt q s
det( ) 0B
Bh
1 cos( )0 sin( )r
2
sin( )cos( ) cos( )
cos( )1 tan( ) sin( ) tan( ) cos( )B
rl
rs r r
Acceleration: 2 2'( )( )d s k qs k q q q k q k qdt q
( ) i ( )
2
cos( ) sin( )cos( ) cos( )
sin( ) tan( ) cos( ) cos( ) tan( )sin( )Bs r r r r
sin( ) tan( ) cos( ) cos( ) tan( )sin( )B r r r r
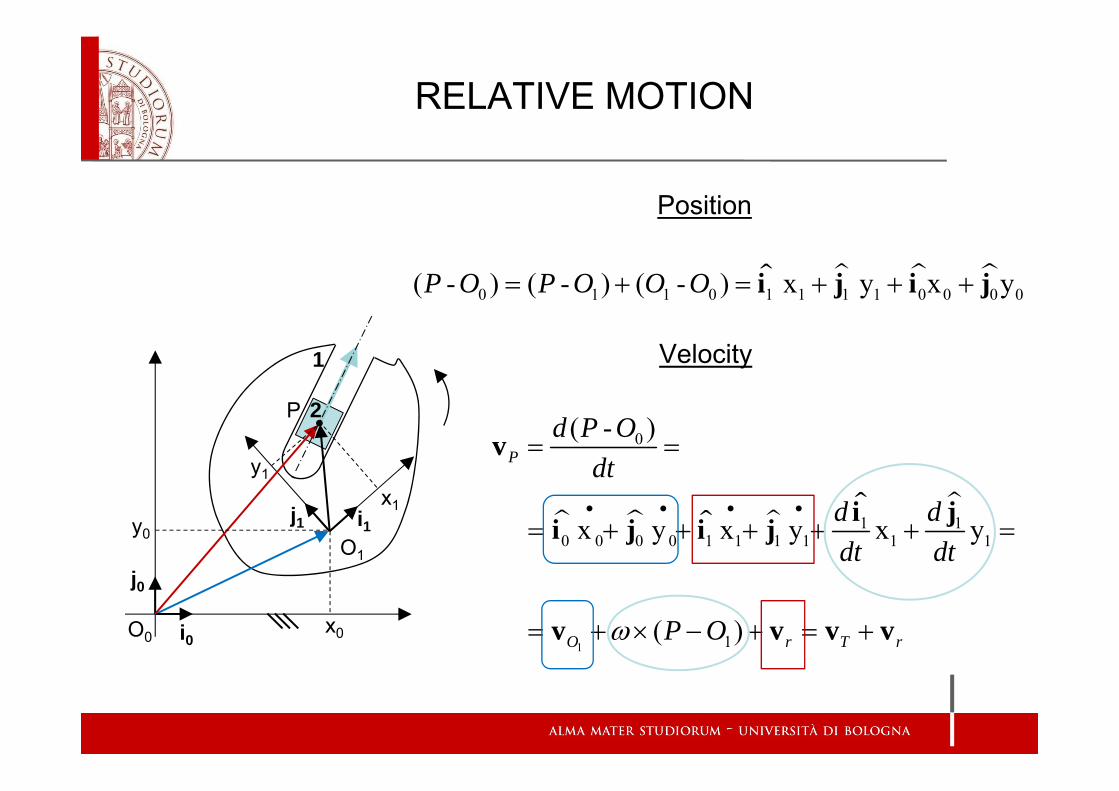
RELATIVE MOTION
Position
0 1 1 0 1 1 1 1 0 0 0 0( - ) ( - ) ( - ) x y x yP O P O O O i j i j
1 Velocity
P
y1
20( - )
Pd P O
dt v
y0
jO1
x1j1 i1 1 1
0 0 0 0 1 1 1 1 1 1x y x y x yd ddt dt
i ji j i j
j0
i0 x0O01 1( )O r T rP O v v v v
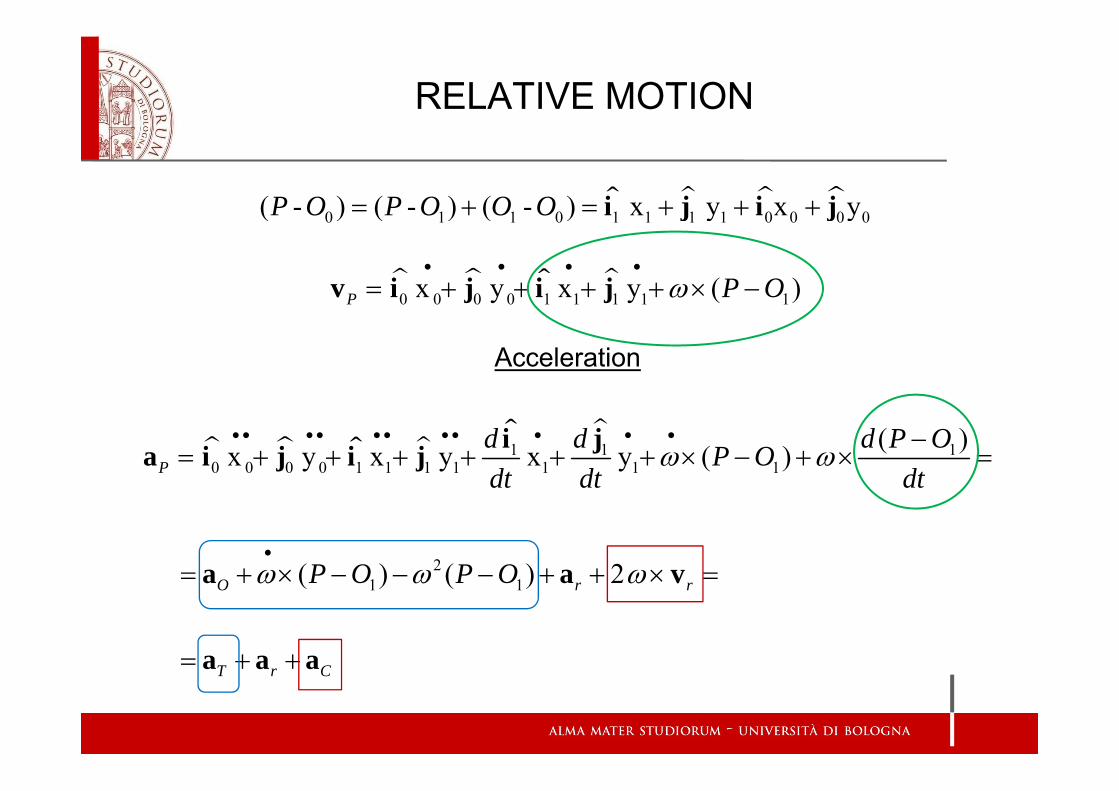
RELATIVE MOTION
0 1 1 0 1 1 1 1 0 0 0 0( - ) ( - ) ( - ) x y x yP O P O O O i j i j
0 0 0 0 1 1 1 1 1x y x y ( )P P O
v i j i j
0 1 1 0 1 1 1 1 0 0 0 0( ) ( ) ( ) y yj j
Acceleration
1 1 1
0 0 0 0 1 1 1 1 1 1 1( )x y x y x y ( )P
d d d P OP Odt dt dt
i ja i j i j
2( ) ( ) 2
dt dt dt
P O P O
a a v1 1( ) ( ) 2O r rP O P O
a a v
a a aT r C a a a
KINEMATICS: SUMMARY
T i /P bl M h dTopic/Problem
• Kinematics of a particle
Methods
Cartesian planar vectors; p
• Kinematics of a rigid body
pComplex Numbers
Cartesian planar vectors;Kinematics of a rigid body(Rivals theorem, Instant Centre ofRotation, Kennedy-Aronhold theorem, Rotational/Translational/Rolling motions)
Cartesian planar vectors; Complex Numbers
g )
• Kinematic analysis of mechanisms(Position, Velocity, and Acceleration analyses,
Graphical approach;Analytical approaches:(Position, Velocity, and Acceleration analyses,
Relative motion)Analytical approaches:
• explicit formulation
• matrix formulation
• Complex Numbers
Recommended