Electronics and Power Distribution
AME 470: Senior Design
ASME Bulk Material Transporter
Matt Bertke, Paul DeMott, Patrick Hertzke, Will Sirokman
4 November 2004

Senior Design: Team
Burja _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
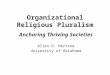
ElectronicsCircuit Diagram

Senior Design: Team
Burja _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
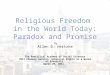
ElectronicsControl Box
2 Slide Potentiometers Control MotorsMouser Part 312-9201; 5K linear, 45 mm travel
6 Pushbutton SwitchesFunctions: algorithm ascend, algorithm descend, swing arm manual fwd, swing arm manual reverse, dump rice, resetJameco Part 26622; momentary pushbutton
1 Master SwitchJameco Part 196154CR; rocker switch
The following controls will be mounted on the control box:

Senior Design: Team
Burja _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
ElectronicsOnboard
Fuse and Fuse Holder
2 9V and 9 AA Batteries and Holders
1 Rotary encoder and associated gears. Quadrate (incremental) output.
The following controls will be onboard:

Senior Design: Team
Burja _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
ElectronicsProcessors
The control box is connected to the Mini-Max Processor.
The Mini-Max, in turn, connects to 3 H-Bridges, which each power one motor.
H BridgeMini-Max

Senior Design: Team
Burja _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
ElectronicsControl Philosophy
Philosophy
The system will be designed to incorporate automation for precision and ease of use, but will include operator feedback and human control.
• Drive motors
Slide pots allow independent motor control with reverse, neutral, and variable forward speeds.
• Swing arm
The rotary encoder senses arm angle and microprocessor drives motor for fully automated operation. Manual override switch available to operator.
• Dumping mechanism
Pushbutton control activates solenoid and releases door latch.

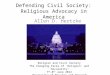
Start
Processor converts analog input from pots to forward/neutral/reverse PWM for treads
Function button pressed No
Ascend pressedDumppressed
Descend pressed
Directions as viewed from side, with back to the left, front to the right
ElectronicsLogic/Program Structure
Blue shading denotes loop

Electronics

Electronics

Solenoid is energized by completion of circuit during
press
Rice dump pressed
Return to start
NoteThis action does not interrupt the driving microprocessor sequence; the solenoid is not connected to the microprocessor
ElectronicsDischarge

Interrupt Buttons
RESET
• The program returns to START
• The drive motors are not affected
• If not at horizontal, swing arm should be returned to the position via manual control
• Swing arm algorithm will be restarted on the button press.
MANUAL OVERRIDE (REVERSE)
Calls a subroutine where:
• The swing arm motor is driven reverse as long as button is held down.
• Neither swing arm algorithm nor drive motors are not affected; there is no reset. Motors remain controllable via the potentiometers.
• Upon release of the button, the subroutine exits and the program resumes.
• Note: Operator should not initiate manual override while the processor is driving the swing arm without first pressing RESET.
MANUAL OVERRIDE (FORWARD)
Calls a subroutine where:
• The swing arm motor is driven forward as long as button is held down.
• Neither swing arm algorithm nor drive motors are not affected; there is no reset. Motors remain controllable via the potentiometers.
• Upon release of the button, the subroutine exits and the program resumes.
• Note: Operator should not initiate manual override while the processor is driving the swing arm without first pressing RESET.

Senior Design: Team
Burja _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
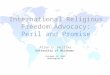
ElectronicsLocation of components
The electronic components will be placed on the chassis below
the rice bin.
• There is flexibility regarding the horizontal placement of electronic components such as battery packs.
• They will be located as needed to effect the proper center of gravity. Expected location is shown in the figure.

Senior Design: Team
Burja _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
ElectronicsPower distribution
Replacement
It is anticipated that the 9V batteries will last for the duration of the 10 minute competition, while the AA batteries will likely be replaced halfway through. To ease this process, two 8 AA Battery holders are purchased. Each will have a pinned connector which can be plugged and unplugged for easy transfer.
Pulse Width Modulation
Pulse width modulation allows motors to operate at reduced average voltage while maintaining torque without increasing current draw.
Power Management
To maximize available power to the motors, the 12V from the AA batteries are used solely to power the motors. All other power is provided by the 9V batteries. All allowed batteries are used.

Senior Design: Team
Burja _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
ElectronicsPower distribution
Energizer E91
Alkaline
Energizer NH15 Rechargeable
Recommended