University of Minho, Portugal
Engineering School
e-Cane
Electronic Cane Development
A thesis presented
by
António Rafael Cardoso Costa
Submitted to the University of Minho in order to obtain the degree of
Master in Electronics Engineering
Department of Industrial Electronics
University of Minho, Portugal
October 2009
i
“The rung of a ladder was never meant to rest upon, but only to hold a man's foot long
enough to enable him to put the other somewhat higher”. (Thomas Huxley)
ii
iii
Dissertation conducted under the
scientific supervision of Prof. Filomena
Soares, Associate Professor at the
Department of Industrial Electronics of
the University of Minho.
iv
v
Resumo
Da colaboração entre a Universidade do Minho e a APPACDM (Associação
Portuguesa de Pais e Amigos do Cidadão Deficiente Mental) surgiu a ideia do
desenvolvimento deste projecto, com a finalidade de melhorar a qualidade de vida de
pessoas cegas e portadoras de deficiência mental.
A bengala é utilizada como auxiliar de pessoas cegas nos seus movimentos
diários, tendo demonstrado ser uma grande ajuda para a independência e confiança dos
mesmos. Este método tem como grande vantagem o baixo custo de aquisição
comparativamente com outros auxiliares tais como, por exemplo, o uso de cães guias.
No entanto, apresenta algumas desvantagens, nomeadamente a impossibilidade da
detecção de obstáculos a partir de uma determinada distância, ou a partir de uma certa
altura.
Este projecto é dedicado ao desenvolvimento de uma bengala de baixo custo, à
qual serão adicionados sensores de ultra-sons, capazes de ultrapassar as limitações da
bengala normal. Como o público-alvo são pessoas cegas com deficiência mental, é
também objectivo do projecto desenvolver uma pulseira que receba a informação
proveniente dos sensores e vibre quando detecta obstáculos. Assim, o utilizador pode
distinguir o lado esquerdo do lado direito – competência frequentemente não adquirida
pelo utilizador – através da vibração, tanto do punho da bengala como da pulseira.
Utiliza-se o microcontrolador ATMEGA16, que efectua o processamento dos
sinais provenientes dos sensores, a activação do micro motor existente na bengala e a
activação do módulo de rádio frequência. Este, por sua vez, faz activar o micro motor
existente na pulseira.
Encontra-se concluído e operacional, em laboratório, o primeiro protótipo da
bengala electrónica. O protótipo final e o teste em ambiente real serão realizados num
futuro próximo.
vi
vii
Abstract
From the collaboration between the University of Minho and APPACDM
(Portuguese Association of Parents and Friends of Mentally Retarded Citizens) arose
the idea of developing this project, with the purpose to improve the quality of life of
blind people with mental disability.
The white cane is the most common method used to assist blind people in their
daily movements. It has proved to be a great help to their independence and confidence.
Its low cost is an advantage regarding other processes, such as the use of guide dogs.
However, this method has some disadvantages, such as the impossibility of detecting
obstacles from a certain distance or above a certain height.
This project is dedicated to the development of a low cost cane equipped with
ultrasonic sensors, capable of overcoming the limitations of the white cane. Since the
target group is blind people with mental disabilities, it is also an objective of the project
to develop a bracelet that receives the information from the sensors. This bracelet will
warn the user of the presence of an obstacle on the left side. To the right side and front,
the warning signal will be at the cane. This enables the user to start distinguishing the
left side from the right side – a competence not acquired by some blind people with
mental disabilities – through the vibration of both the cane and the bracelet.
In order to control the system, an ATMEGA16 microcontroller is used. It
processes the signals coming from the sensors and the warning signals, activates the
micro motor implemented on the cane and also activates the RF module, which will
activate the micro motor in the bracelet.
The first laboratory prototype is complete and operational. The final prototype
and the tests in a real environment will be performed in the near future.
viii
ix
Acknowledgements
I would like to express my sincere thanks to my supervisor, Prof. Filomena Soares
for the guidance and support all along the development of this project. With her critical
opinion but also with her confidence on my work, this project was successfully
accomplished.
To APPACDM, in particular to Dr. Fátima Moreira and Dr. Dora Ribeiro for their
help in the understanding of the mind of blind people with mental disabilities and for
the great opportunity of working on this project.
I would like to say thanks to Ricardo Freitas for his great contribution to this
project and also for his friendship through the years. I also wish to thank Nuno Brito
and Paulo Ribeiro for their help.
To my friends, for their friendship and for being with me at the good times and bad
times on my life. They were always there to help me overcoming innumerous
difficulties and, for that, I will always be grateful.
To the technical staff for their cooperation, providing help and access to the
facilities of the Department of Industrial Electronics.
Last but not least, I would like to thank my parents, my brothers and my sister in
law, for their encouraging support, as well as financial support, during my studies. They
are and they will always be a model for me to follow.
x
xi
Index
1 Introduction ............................................................................................................. 21
1.1 Motivation ........................................................................................................ 22
1.2 Overview of similar projects ............................................................................ 22
1.3 Aim of the project ............................................................................................ 23
1.4 Project Milestones ............................................................................................ 24
1.5 Thesis outline ................................................................................................... 25
1.6 References ........................................................................................................ 26
2 State of the Art ........................................................................................................ 27
2.1 Blindness and existing solutions ...................................................................... 28
2.1.1 Mobility and blind people......................................................................... 28
2.1.2 Mobility techniques .................................................................................. 29
2.1.3 Mobility, without auxiliary methods ........................................................ 29
2.1.3.1 Reference and information points ..................................................... 29
2.1.3.2 Tactile movement .............................................................................. 30
2.1.3.3 Mobility plans ................................................................................... 30
2.1.4 Auxiliary help methods ............................................................................ 30
2.1.4.1 Human ............................................................................................... 30
2.1.4.2 White cane ......................................................................................... 31
2.1.4.3 Guide dogs......................................................................................... 33
2.1.4.4 Electronic Instruments....................................................................... 34
2.2 Electronic tools available ................................................................................. 35
2.2.1 The Laser Cane ......................................................................................... 35
2.2.2 The Ultra Cane.......................................................................................... 36
2.2.3 Mowat Sonar ............................................................................................ 38
2.2.4 K-Sonar ..................................................................................................... 38
2.2.5 The Polaron .............................................................................................. 39
2.2.6 The GuideCane ......................................................................................... 40
2.2.7 Hand Guide ............................................................................................... 40
2.2.8 WalkMate ................................................................................................. 41
xii
2.2.9 Laser Long Cane ....................................................................................... 41
2.3 References ........................................................................................................ 44
3 Background ............................................................................................................. 47
3.1 Sensors ............................................................................................................. 48
3.1.1 Ultrasonic Sensors .................................................................................... 48
3.1.1.1 Principle of operation ........................................................................ 48
3.1.1.2 Distance measurement....................................................................... 49
3.1.1.3 Benefits.............................................................................................. 50
3.2 Ultrasonic SRF02 ............................................................................................. 50
3.3 Microcontroller ................................................................................................ 51
3.3.1 Atmega16 pin description ......................................................................... 52
3.3.2 ADC – Analog to digital converter .......................................................... 53
3.3.2.1 Operation ........................................................................................... 54
3.3.2.2 Starting a conversion ......................................................................... 54
3.4 Antenna ............................................................................................................ 55
3.4.1 RF – Radio Frequency .............................................................................. 55
3.4.2 RF module ................................................................................................ 56
3.5 References ........................................................................................................ 56
4 e - Cane development .............................................................................................. 57
4.1 e - Cane Project overview ................................................................................ 58
4.2 Ultrasonic sensors ............................................................................................ 59
4.3 Detection Methods ........................................................................................... 60
4.3.1 MA40A5 ................................................................................................... 61
4.3.1.1 Transmitter ........................................................................................ 61
4.3.1.2 Emitter Schematic ............................................................................. 62
4.3.1.3 Receptor ............................................................................................ 63
4.3.1.4 Block diagram ................................................................................... 63
4.3.1.5 Receiver circuit ................................................................................. 65
4.3.1.6 General Schematic............................................................................. 66
4.4 Components, Acronyms and Values ................................................................ 67
4.4.1 SRF02 Ultrasonic range finder ................................................................. 68
4.5 Microcontroller ................................................................................................ 69
xiii
4.6 Bracelet ............................................................................................................ 70
4.7 Micro motor C-6070 ........................................................................................ 71
4.8 Antenna: RF module ........................................................................................ 71
4.9 Prototype .......................................................................................................... 72
4.10 References ........................................................................................................ 74
5 Software .................................................................................................................. 75
5.1 Compiler .......................................................................................................... 76
5.2 AVR Dragon .................................................................................................... 76
5.3 Microcontroller schematic ............................................................................... 77
5.4 Flowchart ......................................................................................................... 77
5.4.1 MA40A5 ................................................................................................... 78
5.4.2 SRF02 ....................................................................................................... 79
5.5 Implemented Functions in the microcontroller ................................................ 80
5.6 References ........................................................................................................ 81
6 Results ..................................................................................................................... 83
6.1 Experiments overview ..................................................................................... 84
6.2 Laboratory Results ........................................................................................... 84
6.2.1 Crosstalk Prevention ................................................................................. 85
6.2.2 Experiment 1 – Range of 30 centimeter ................................................... 86
6.2.3 Experiment 2 – Range of 1 meter ............................................................. 88
6.3 Bracelet laboratory tests ................................................................................... 91
6.4 Prototype experiment ....................................................................................... 92
7 Conclusions ............................................................................................................. 93
Appendix ........................................................................................................................ 97
Appendix A – Datasheets of the components used ..................................................... 99
Appendix B – PCB boards of the prototype ............................................................. 101
xiv
xv
Index of Figures
FIGURE 1: GENERAL VIEWS OF THE PROTOTYPE TRIAL CANE [3] ................................................................. 23
FIGURE 2: PARKING ON THE CURB ............................................................................................................... 28
FIGURE 3: HUMAN HELP ............................................................................................................................. 31
FIGURE 4: WHITE CANE ............................................................................................................................... 31
FIGURE 5: WHITE CANE MEASUREMENT ...................................................................................................... 32
FIGURE 6: GUIDE DOG ................................................................................................................................. 33
FIGURE 7: LASER CANE [6] ......................................................................................................................... 35
FIGURE 8: BRAIN CONNECTION [7] ............................................................................................................. 36
FIGURE 9: AVOIDING AN OBSTACLE ON THE RIGHT SIDE [11] ...................................................................... 37
FIGURE 10: DETECTING AN OBSTACLE ON THE LEFT SIDE [11] .................................................................... 37
FIGURE 11: MOWAT SONAR [12] ................................................................................................................. 38
FIGURE 12: K-SONAR [13] .......................................................................................................................... 39
FIGURE 13: POLARON [14] .......................................................................................................................... 39
FIGURE 14: THE GUIDE CANE [15] .............................................................................................................. 40
FIGURE 15: THE HAND GUIDE [17] ............................................................................................................. 41
FIGURE 16: THE WALKMATE [18] ............................................................................................................... 41
FIGURE 17: LASER LONG CANE [19] ........................................................................................................... 42
FIGURE 18: OBSTACLE DETECTION EXPLANATION ...................................................................................... 49
FIGURE 19: ATMEGS16 PINOUT .................................................................................................................. 52
FIGURE 20: ANTENNA: ELECTROMAGNETIC SCHEMATIC ............................................................................. 55
FIGURE 21: MICROCONTROLLER BLOCK DIAGRAM .................................................................................... 59
FIGURE 22: RANGE USING SENSORS ............................................................................................................ 60
FIGURE 23: LEFT DETECTION RANGE ........................................................................................................... 60
FIGURE 24: ULTRASONIC SENSORS ............................................................................................................. 61
FIGURE 25: ICM755 AS “ASTABLE OPERATION” ......................................................................................... 62
FIGURE 26: EMITTER ................................................................................................................................... 62
FIGURE 27: BLOCK DIAGRAM OF THE RECEPTOR ......................................................................................... 63
FIGURE 28: BAND PASS FILTER AND AMPLIFIER ......................................................................................... 64
FIGURE 29: INVERTER AMPLIFIER ................................................................................................................ 64
FIGURE 30: PEAK DETECTOR....................................................................................................................... 65
FIGURE 31: RECEIVER CIRCUIT .................................................................................................................... 65
FIGURE 32: ULTRASONIC SCHEMATIC ......................................................................................................... 66
FIGURE 33: SRF02 ULTRASONIC RANGE FINDER ......................................................................................... 68
FIGURE 34: SRF02 – I2C MODE .................................................................................................................. 69
FIGURE 35: PULSES GENERATED BY THE MICROCONTROLLER ..................................................................... 70
FIGURE 36: 3D BRACELET OVERVIEW ......................................................................................................... 71
FIGURE 37: CEBEK C-6070 .......................................................................................................................... 71
xvi
FIGURE 38: ANTENNA: (A) TRANSMITTER FM - RTFQ2; (B) RECEIVER FM - RRFQ2 ................................ 72
FIGURE 39: FIRST PROTOTYPE..................................................................................................................... 72
FIGURE 40: PROTOTYPE INSIDE VIEW .......................................................................................................... 73
FIGURE 41: BRACELET PROTOTYPE ............................................................................................................. 74
FIGURE 42: AVR DRAGON .......................................................................................................................... 76
FIGURE 43: MICROCONTROLLER MAIN CONNECTIONS ................................................................................. 77
FIGURE 44: MA40A5 FLOWCHART ............................................................................................................. 78
FIGURE 45: SRF02 FLOWCHART .................................................................................................................. 79
FIGURE 46 : WAVE FORM ON THE TERMINALS OF THE EMITTER ................................................................... 85
FIGURE 47: CROSSTALK PREVENTION ......................................................................................................... 85
FIGURE 48: DETECTION OF AN OBSTACLE (D = 30 CM) ................................................................................ 86
FIGURE 49: ECHO SIGNAL RECEIVED FROM THE OBSTACLE DETECTION (D=30 CM) ..................................... 86
FIGURE 50: ECHO SIGNAL RECEIVED AFTER THE FILTER AND THE AMPLIFIER (D=30CM) ............................. 87
FIGURE 51: ECHO SIGNAL RECEIVED AFTER THE DETECTION CIRCUIT (D=30CM) ........................................ 87
FIGURE 52: DETECTION OF AN OBSTACLE (D = 1M) ..................................................................................... 88
FIGURE 53: ECHO SIGNAL RECEIVED FROM THE OBSTACLE DETECTION (D=1 M) ......................................... 88
FIGURE 54: ECHO SIGNAL RECEIVED AFTER THE FILTER AND THE AMPLIFIER (D=1 M) ................................ 89
FIGURE 55: ECHO SIGNAL RECEIVED AFTER THE DETECTION CIRCUIT (D=1 M) ............................................ 90
FIGURE 56: RF TEST: A) TRANSMITTER WAVE; B) RECEIVER WAVE ........................................................... 91
FIGURE 57: PROTOTYPE FINAL TEST ............................................................................................................ 92
FIGURE 58: PEAK DETECTOR ....................................................................................................................... 92
xvii
Index of tables
TABLE 1: MOBILITY HELP ........................................................................................................................... 29
TABLE 2: COMPARISON OF THE MAIN AUXILIARY METHODS ....................................................................... 34
TABLE 3: CANES CHARACTERISTICS ............................................................................................................ 43
TABLE 4: MAJOR COMPONENTS LISTING AND ACRONYMS .......................................................................... 67
TABLE 5: RESISTOR VALUES........................................................................................................................ 67
TABLE 6: CAPACITOR VALUES..................................................................................................................... 68
xviii
xix
Nomenclature
Symbol Description Unit
d distance m
F frequency Hz
I current A
r radius meter
t time s
𝒕𝒕𝒓𝒂𝒏𝒔𝒎 Transmission time s
𝒕𝒓𝒆𝒄𝒆𝒑𝒕𝒊𝒐𝒏 Reception time s
T period s
v velocity of propagation m/s
Vamp Amplifier Output V
Vcc Operation Voltage V
Vdc DC voltage V
Vout Output voltage V
Vpp Peak to peak Voltage V
Acronyms
Symbol Description
ADC Analog- to-digital Converter
H High
I2C Inter-Integrated Circuit
L low
M medium
RX Ultrasonic Receiver
SRF02 Sensor Range Finder
SDA Serial Data
xx
SCL Serial Clock
TX Ultrasonic Transmitter
21
1 Introduction
Summary
This chapter provides the motivation to the development of this project.
It has the intention to demonstrate the need for this project, showing its
motivation and aim. It also explains the method used during the development.
Finally, the thesis outline is presented.
1.1 Motivation
1.2 Overview of similar projects
1.3 Aim of the project
1.4 Project milestones
1.5 Thesis outline
CHAPTER 1 – INTRODUCTION ELECTRONIC CANE DEVELOPMENT
22
1.1 Motivation
From the collaboration between the University of Minho (Guimarães, Portugal)
and APPACDM (Portuguese Association of Parents and Friends of Mentally Retarded
Citizens, located in the city of Braga), which aims to help and integrate people with
difficulties, emerged the idea of developing an electronic cane that will facilitate the
mobility of blind people, in particular of one of its students who also has a mental
disability, which restricts her from certain tasks.
The project and the development of this cane took place at the University of
Minho, in its Department of Industrial Electronics.
1.2 Overview of similar projects
Many projects were and are being developed around the world with the aim to
assist the locomotion of blind people. Canes using sensors to detect an obstacle is one of
those. The idea of this kind of technology has arisen primarily in Germany and then it
has been “imported” to countries such as United Kingdom, Brazil, Canada and United
States.
Brazil has been developing a walking stick with electronic sensors. On the
presence of an obstacle, a warning device that vibrates at a distance of at least one meter
and a half is switched on. It can detect obstacles on the waist line or 70 cm above the
shoulders. These sticks were tested in more than 30 users, with good results [1].
In Brazil it is possible to find another stick, similar to the previous one, but with
the ability of distinguishing colors. This project was developed by the Inaciana’s
Educational Foundation, an Electronic Engineering school. The device is able to emit a
beep every time an obstacle is detected, reducing the frequency of the beeps as the
obstacle gets closer [2].
In Canada and United States there are also references to the development of this
type of technology. A walking stick with the same characteristics of the referred above
was developed and implemented. In [3], beyond the images of the prototype, the authors
present all the cane characteristics, using schemes and illustrative texts. Figure 1 shows
the prototype.
ELECTRONIC CANE DEVELOPMENT CHAPTER 1 – INTRODUCTION
23
Figure 1: General views of a prototype trial cane [3]
In Portugal it is also possible to purchase a cane, the Ultra Cane, with similar
characteristics, such as the use of ultrasonic sensors to detect obstacles and vibrating
signals, at a cost of 800€ [4]. That purchase can be made on the site of Ataraxia [5].
1.3 Aim of the project
The aim of the e-Cane project is the development of a low cost cane with
ultrasonic sensors to detect obstacles both on right/front and left side of the user. As
seen in section 1.2, some projects are being developed in this area. However their
purpose is to help a restricted group: blind people. The target group of the e-Cane
project is broader: blind people with mental disability. The e-Cane aims at enabling a
superior independence of these individuals. The integration of the sensors in the cane
provides a correct detection of obstacles.
Considering the cognitive development of the first user (she does not distinguish
left from right positions), the use of a bracelet in the left wrist was foreseen. The
bracelet will give the user information corresponding to the detection of an obstacle in
the left side. So, she will be able to gradually start distinguishing the left side from the
right side. This will happen because when an obstacle is detected, the warning signal
will be on the cane or on the wrist, depending on the location of the obstacle.
CHAPTER 1 – INTRODUCTION ELECTRONIC CANE DEVELOPMENT
24
1.4 Project Milestones
The work consists of the design of an electronic cane. It requires selecting
sensors, a board capable of performing data acquisition, a microcontroller, micro motors
and a bracelet.
Several tasks were performed:
a) Literature review of sensors.
b) Sensor selection.
Ultrasonic sensors were chosen, due to their projection on the environment and
the range they can achieve both on the horizontal or vertical axis.
c) Sensor hardware development.
Sensor hardware (transmitter and receiver) has to be implemented, taking into
account the characteristics and working conditions of the ultrasonic sensors chosen. All
the tests were performed using the equipment available at the laboratory, such as an
oscilloscope, a function generator and a power supply.
d) Microcontroller programming.
The information acquired by the sensors has to be processed. A program was
written (in C language) in order to manage this information, activating the
microcontroller pins according to the information received. If an obstacle appears in the
front/right side of the user the microcontroller will activate a micro motor on the cane
and, if the obstacle is at the left side, it will activate a micro motor on the bracelet by
sending a signal through an antenna.
ELECTRONIC CANE DEVELOPMENT CHAPTER 1 – INTRODUCTION
25
e) Bracelet development.
As mentioned before, an antenna is required to send the information to the
bracelet. So, a radio frequency module has to be chosen and implemented. It is essential
that the module has the characteristics needed for this project, such as small size and
low power requirement.
f) Tests and adjustments.
1.5 Thesis outline
This document is divided in 7 chapters.
Chapter 1 presents the motivation and purpose of this project. An explanation of
what to expect from it is given and similar projects are presented. It also contains the
project milestones, making an overview of the several tasks to be performed.
Chapter 2 makes reference to some problems of the daily routine of blind people. It
also contains information about some techniques used to help this target group, like the
white cane, the guide dogs and ETA’s (Electronic Travel Aids). Information about
similar projects is also presented.
Chapter 3 details the theoretical elements used in the development of the electronic
cane.
Chapter 4 examines the hardware part of the design, explaining all the processes
used in the development of the cane. It makes reference to the sensors, in particular to
the transmitter and the receiver. It also contains information about the microcontroller
used and the development of the bracelet.
Chapter 5 has an explanation of the software used in the development of the cane,
using flowcharts and texts.
CHAPTER 1 – INTRODUCTION ELECTRONIC CANE DEVELOPMENT
26
Chapter 6 contains the laboratory results and their discussion, using images from an
oscilloscope which were taken from all the processes used during the e-Cane
development.
Chapter 7 presents all the conclusions that were achieved during the e-Cane
development and also the future implementations of the project.
All the datasheets used and some illustrated pictures showing the PCB boards
(separated by processes) are presented in the appendix.
1.6 References
[1].[Online] [Cited: October 25, 2008.] http://www.lerparaver.com/node/577.
[2].[Online] [Cited: October 25, 2008.]
http://sentidos.uol.com.br/canais/materia.asp?codpag=10718&cod_canal=11.
[3]. Hoyle, BS; Fowler, JM; Waters, DA; Withington, DJ, Development of the
Electronic Guide Cane for Enhanced Primary Mobility for the Vision Impaired Euro-
Assist-CVHI 2004 Conference and Workshop on Assitive Technologies for Vision and
Hearing Impairment, 2004.
[4].[Online][Cited:November10,2008.]
http://www.megaserafim.pt/index.php?page=shop.product_details&category_id=53&fly
page=shop.flypage&product_id=86&option=com_virtuemart&Itemid=26
[5].[Online] [Cited: November 10, 2008.] http://www.ataraxia.pt/produtos.php?id=6001
http://www.ataraxia.pt/produtos.php?id=6001
27
2 State of the Art
Summary
This chapter starts with a little overview of some similar projects of “electronic
canes”, making also reference to blindness and associated problems.
The research clarifies certain aspects of the project development and it helps to
identify the innovation of the e-Cane project compared to the existing ones.
2.1 Blindness and existing solutions
2.2 Electronic tools available
CHAPTER 2 – STATE OF THE ART ELECTRONIC CANE DEVELOPMENT
28
2.1 Blindness and existing solutions
Is considered a Visual Disability when a person has an injure on the visual
system that provokes a total loose or in part of the vision. It can be caused by a disease,
malformation, poor nutrition or trauma. This impairment causes a reduction or loss of
some abilities, such as to recognize faces or places and to walk safely [1].
2.1.1 Mobility and blind people
To blind people, the daily routines, as walking safely in the streets avoiding the
obstacles, can be a hard work. Obstacles as in Figure 2, are an example of what blind
people face up every days on the streets.
Figure 2: Parking on the curb
People with visual impairments can travel independently using different tools
and techniques. Orientation and mobility specialists are trained to teach those people
how to move securely and autonomously. They also can learn how to travel on specific
routes that they may use often [1].
ELECTRONIC CANE DEVELOPMENT CHAPTER 2 – STATE OF THE ART
29
2.1.2 Mobility techniques
Nowadays, we are able to find some ways to help the movement of the blind
people. They can be divided in two groups: one of them without using mobility
auxiliary help and the other one using it [2]. Table 1 presents some of the differences.
Table 1: Mobility help
In the following sub-chapters these mobility items are explained in detail.
2.1.3 Mobility, without auxiliary methods
In this chapter it will be explained the different methods used to help blind
people without a mobility auxiliary method.
2.1.3.1 Reference and information points
The reference and information points support the orientation of the blind people.
A reference point is defined as an object, sound, smell or tactile indicator that is
exclusive of the place that the blind is moving. To be permanent in time, space and
easily accessible, it is the one of the characteristics that this kind of objects need to
have.
In contrast, a point of information is any auditory stimulation or tactile, which
gives information useful to his movement.
CHAPTER 2 – STATE OF THE ART ELECTRONIC CANE DEVELOPMENT
30
In the case of reference points it is only need one point to determinate where the
person is, and in the case of information points it is necessary an aggregation of them
[2].
2.1.3.2 Tactile movement
This technique consists on walking parallel to a wall or any other guide surface.
This has the purpose to avoid shocks to obstacles low placed, such as, chairs or tables.
At the same time this has the aim to facilitate the location of points of reference or
information on the wall that are essential to improve the blind movement [2].
2.1.3.3 Mobility plans
The mobility plans are an addition to the correctly movement of the blind
people. They are produced in different materials that can be distinguished by touch what
has the aim to help to produce a mental image of the spaces. Mobility plans can be
made using methods such as sound or it can be writing in Braille.
Its development is complex because a lot of restrictions have to be considered, in
order to the person distinguish them. Considering that the touch has different
characteristics comparing to the vision, a proper training is necessary for a correct
reading of the plans [2].
2.1.4 Auxiliary help methods
It will be consider as auxiliary help methods those that are constantly in “touch”
with the user, therefore an explanation of some of them is described below.
2.1.4.1 Human
This technique helps the blind people to walk safely in all kind of places that can
be known or not by him, using the help of another person (Figure 3). The human helper
has to remain a little in front and the blind has to hold the person above the elbow.
During the movement they have to be always in touch in order to avoid obstacles.
ELECTRONIC CANE DEVELOPMENT CHAPTER 2 – STATE OF THE ART
31
Figure 3: Human Help
2.1.4.2 White cane
Tools like white cane with a red tip1 can be used to improve mobility, Figure 4.
The white cane has to be sweeping the area in front describing a semi-circle that covers
a space between the two shoulders of the person [3].
For detecting obstacles with the white cane, the blind person has always to touch
the obstacle, and he/she does not know in advance the presence of it. Sometimes he is
not able to detect the obstacle, for example a truck, because the cane will pass under it
and the blind can accidently go against the higher part of the truck and gets hurt [3].
Figure 4: White cane
1 Red tip - International symbol of blindness
CHAPTER 2 – STATE OF THE ART ELECTRONIC CANE DEVELOPMENT
32
The white cane has some advantages which are described below [3] [4]:
It helps to find curbs, stairs, stuffs parked in the way and things that the user
needs to find (when properly used);
It do not need a hand contact to detect obstacles;
It can be used on different temperature or weather conditions;
No maintenance (virtually).
However it has some disadvantages like:
Limited range (limited to its size);
Does not provide protection against collision to the upper part of the body;
Discrimination;
Danger of tripping pedestrians in congested areas.
As seen in Figure 5, the white cane only provides a distance measure of its
dimension. Thus, the development of this electronic cane using sensors will offer a
larger sensing area.
Figure 5: White cane measurement
ELECTRONIC CANE DEVELOPMENT CHAPTER 2 – STATE OF THE ART
33
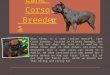
2.1.4.3 Guide dogs
Instead of the cane some people use guide dogs to assist them in mobility
(Figure 6). These dogs are trained to go around obstacles and to indicate the presence of
a step, for example.
Figure 6: Guide dog
The guide dogs are considered efficient helpers to assist blind people on their
movements; however the maintenance in terms of supplies and treatments eventually
necessary can be expensive. They also have the disadvantage of the impossibility to not
enter in some locals, such as hotels or banks for example [3].
It can be concluded that guide dogs have good advantages to the user, such as:
Psychological, social and physiological benefits;
Companionship;
Reduction of anxiety, depression and loneliness;
In order to avoid obstacles, the dog plan another route directing the blind
through it [3].
On the other hand, they also have some disadvantages:
Extra time and energy needs of the dog;
Some places deny access to its facilities;
Training sessions every time a new dog is necessary [3].
CHAPTER 2 – STATE OF THE ART ELECTRONIC CANE DEVELOPMENT
34
2.1.4.4 Electronic Instruments
Electronic instruments bring advantages to the movement of the blinds, for
example:
Independent travel;
To receive advanced knowledge about obstacles;
Reduce the fear of collisions;
No entrance restrictions on restaurants, hospitals, churches, taxis and
buses.
In order to choose between the three most important methods of helping blind
people, a comparison table was made (Table 2).
Table 2: Comparison of the main auxiliary methods2
Cost Independence Efficiency Maintenance
Psychological,
social and
physiological
benefits
Entrance
restrictions
White
Cane L M M L M L
Guide
Dogs H H H H H H
Electronic
Cane M H H M M L
It can be concluded through the analysis of the table 2, that the guide dogs are
good helpers to blind people. However the electronic cane brings more benefits to the
user, as it is less expensive, has less maintenance costs and do not have any restrictions
in attending social events.
2 Considering L - low; M - medium ; H- high
ELECTRONIC CANE DEVELOPMENT CHAPTER 2 – STATE OF THE ART
35
2.2 Electronic tools available
Over the years some electronic tools were developed in many different countries.
Called ETAs (Electronic Travel Aids), this kind of tools can be used by themselves or
combined with primary aids, such as the guide dog or long canes. Some of those tools
are presented in the next sections [5].
2.2.1 The Laser Cane
Developed in Honolulu3 (United States) and called “The Laser Cane” [6] (Figure
7), it is able to detect obstacles in a range of 12 feet 4 (3.66 meters) in front of the user.
With the objective to warn the user when an obstacle is detected it has two different
methods: audible or a vibrating. The user can choose to use both methods at the same
time or the audible sound can be switched off, using only the vibrating one. The audible
method is consisted of “go, do not go” information sent to the user.
Figure 7: Laser Cane [6]
3 Honolulu is the capital and most populous census-designated place (CDP) in the U.S. state of Hawaii
4 1 feet is equal to 0.3048 meters
http://en.wikipedia.org/wiki/State_capitalhttp://en.wikipedia.org/wiki/Census-designated_placehttp://en.wikipedia.org/wiki/U.S._statehttp://en.wikipedia.org/wiki/Hawaii
CHAPTER 2 – STATE OF THE ART ELECTRONIC CANE DEVELOPMENT
36
2.2.2 The Ultra Cane
From the collaboration between Sound Foresight and the University of Leeds in
United Kingdom, has arisen the idea of a “Bat cane” [7] [8]. Recently it was called “The
Ultra Cane”, being able to detect obstacles during the movement of the blind and when
an obstacle is detected, it warns the user. To detect obstacles it emits an ultrasonic wave
and receives the echo signal from the detection (when occurs an obstacle detection).
Buttons incorporated on the handle have the property to vibrate and to warn the
user how far away is from the obstacle. This method helps the user to have a better
acknowledgement of the environment around him and to improve his reaction to avoid
obstacles.
The adaptation to the Ultra Cane is not a problem and if the blind has already
used a white cane the adaptation should be easier. The feedback that the user gets
through the vibration signal at the handle, helps to build a subconsciously map of the
environment, what in a near future makes easier to move on those places.
Superior Collicolus is a part of the human brain that receives information from
its senses – vision, hearing and touch (Figure 8). For blind people this part only receives
information from two senses: hearing and touch. So, it emits a vibrating signal to the
finger when an obstacle is detected. This has the aim to let the user free to listen to all
the other sounds around him. The vibrating signal at the finger has the purpose to help
the user to create a spatial map which will be very useful at the daily routines [7] [8].
Figure 8: Brain Connection [7]
ELECTRONIC CANE DEVELOPMENT CHAPTER 2 – STATE OF THE ART
37
The Ultra Cane can also be found in Portugal at the website of Ataraxia [9],
having a commercial cost of 800€ [10]. In addition, the website gives access to the
characteristics of the cane in question and also to a video [11], which illustrates how to
use it. The video shows a virtual demonstration of the ultra cane being taken by a man
who is able to avoid numerous obstacles in his way, with confidence and no fear. A
voice of a woman explain that with two buttons the user is able to know which side the
obstacle is, being that way capable to turn for the correctly place in order to avoid it.
In Figure 9, the ultra cane is detecting the presence of an obstacle on the right
side of the user, and indicates to the user that he needs to avoid it by changing his
course to the left side.
Figure 9: Avoiding an obstacle on the right side [11]
In the opposite to the previous figure, Figure 10 has the obstacle on the left side
of the user. The ultra cane detects the presence of it, but it sends the “information” to
the user that he does not need to avoid it, because is far way and he can pass over
without crash.
Figure 10: Detecting an obstacle on the left side [11]
CHAPTER 2 – STATE OF THE ART ELECTRONIC CANE DEVELOPMENT
38
2.2.3 Mowat Sonar
This ETA (Figure 11) uses ultrasonic sensors to determinate the distance to the
obstacles, warning the user by a vibrating signal. The frequency of the warning signal
became higher when the obstacle approaches to the user. This device can be worn on the
chest or on the hand held. When walking on a hallway, the user points the device to the
side wall and has to move away to where the low-high frequency transitions occur,
being that way moving in a safe zone without obstacles. Mowat has a wide beamwidth,
which has the disadvantage of poor bearing resolution [12].
Figure 11: Mowat Sonar [12]
2.2.4 K-Sonar
The K – sonar (Figure 12) is an ultrasonic sensing device that combined with the
long cane increases the independence of blind people. Using this device, it is possible to
perceive all the surroundings that otherwise could not be possible to. The K–sonar
improves the safety and reduces the stress, motivating blind people to move into
unknown places [13].
K-sonar works using ultrasonic sensors to detect obstacles. The sonar
information is gathered and it provides a mental map of objects both in front and sides
of the user. When an object is detected, an audio warning signal is switched on and it
varies according to how far way the obstacle is, indicating that way the distance to the
obstacles, what may increase the reaction to avoid it. The user listens to these sounds
through miniature earphones [14].
ELECTRONIC CANE DEVELOPMENT CHAPTER 2 – STATE OF THE ART
39
Figure 12: K-sonar [13]
2.2.5 The Polaron
It is an electronic device to help blind people and it can be used on the hand or at
the chest (Figure 13). It uses ultrasonic sensors to detect obstacles within four, eight or
sixteen feet. The Polaron can be used combined to a long cane or with a guide dog,
which permits the user to move securely and efficiently. When an obstacle is detected
the warning signal is given by a vibration or by a sound signal. The user is able to
choose both notifications signals and to change the volume, by the use of a switch
located on the control side of the device. When used in the chest, a miniaturized
vibrator located at the neck indicates the presence of an obstacle [14].
Figure 13: Polaron [14]
CHAPTER 2 – STATE OF THE ART ELECTRONIC CANE DEVELOPMENT
40
2.2.6 The GuideCane
This electronic device (Figure 14) is based on ultrasonic sensors and has the aim
to help blind people. It has the property to completely avoid obstacles and training is
not required, given that the process is totally instinctive, since it preserves position
information by merging odometry, compass, and gyroscope data [15] [16].
Figure 14: The Guide Cane [15]
2.2.7 Hand Guide
The Hand Guide (Figure 15) in order to detect obstacles uses infrared
technology which permits a range detection of four feet. The user is able to choose
from two warnings methods: sound or a vibration signal that increases when an obstacle
becomes closer to him. Together with the white cane it is able to provide a good
identification of gasps and steps, while the Hand Guide permits a higher “view” of
barriers, such as the signs on the roads [17].
ELECTRONIC CANE DEVELOPMENT CHAPTER 2 – STATE OF THE ART
41
Figure 15: The Hand Guide [17]
2.2.8 WalkMate
The WalkMate (Figure 16) was produced by Safe Tech International, Inc.
[1993], and it can be worn at the waist level (suspended from the neck loop), or it may
be handheld [18].
The user can choose between a vibrating or a sound as warning signal, when as
obstacle appears in its way. It has two working zones: 7 feet (2.13m) and 4 feet (1.22m).
If an object is detected at the range zone of 7 feet, a slowly pulse (about 4 pulses per
second) will be switched on (beep or vibration). A rapid beep or a vibration with a
higher frequency is triggered when the obstacle becomes closer [18].
Figure 16: The Walkmate [18]
2.2.9 Laser Long Cane
The Laser Long Cane (Figure 17) is able to avoid possible collisions, using a
laser system. The electronic utensils and the power supply necessary to the properly
work of the system are integrated in the handle. The cane emits a laser signal that on the
presence of an obstacle is reflected and received again at the cane. It advertises the user
by a vibrating warning signal at the handle. It is also able to detect obstacles beyond the
CHAPTER 2 – STATE OF THE ART ELECTRONIC CANE DEVELOPMENT
42
head and the chest area. The possibility to combine with diversity long canes is also an
advantage of this device [19].
Figure 17: Laser Long Cane [19]
After the analysis of the characteristics of all the projects equivalents to the
e-Cane, it can be conclude that they all have several points in common. Except for the
Hand Guide, Laser Cane and the Laser Long Cane, they all use ultrasonic sensors to
detect obstacles and all have similar warning methods. Table 3 shows a comparison of
the main characteristics of the projects described above.
ELECTRONIC CANE DEVELOPMENT CHAPTER 2 – STATE OF THE ART
43
Table 3: Canes characteristics
Cane Sensor type Range Warning method
Min Max vibrate audible
Laser Cane Laser 0 3.66 m x x Guide Cane Ultrasonic 2 cm 4 m x Hand Guide Infrared 0 1.23 m x x
K-Sonar Ultrasonic 1.83 m 4.88 m x
Laser Long Cane Laser 0 1.45 m x Mowat Sensor Ultrasonic 1 m 4 m x
Polaron Ultrasonic 1.23 m 4.88 m x x Ultra Cane Ultrasonic 2 m 4 m x Walk Mate Ultrasonic 1.22 m 2.13 m x x
New e-Cane Project
Ultrasonic 0.18 m 2 m x
Comparing the working range of the canes, most of them have a larger distance;
however it was thought that more than 2 meters could be confusing for the user. Since
the target group shows mental disability, with a range higher than 2 meters, more
obstacles could be detected, that might not be necessary to detect. For example, walking
into a shopping would be very difficult, because the walls would be constantly detected
by the cane, what would confuse the user.
It can be assumed, by Table 3, that the e-Cane is a similar project. However it
has the advantage of using a different method to warn the user when an obstacle is
detected in the left side, by using a bracelet. This difference makes the e-Cane a better
choice, since it will help a larger group of users.
Regarding costs, the e-Cane is a low cost equipment for helping blind people
with mental impairments.
CHAPTER 2 – STATE OF THE ART ELECTRONIC CANE DEVELOPMENT
44
2.3 References
[1].[Online] [Cited: November 5, 2008.]
http://www.acapo.pt/information.asp?op=cegueira.
[2].Manuel Bueno Martín and Salvador Toro Bueno. Deficiência Visual, Aspectos
Psicoevolutivos e Educativos . s.l. : Santos Livros Editora 2003.
[3].[Online] [Cited: January 15, 2009.] http://www.livingblind.com.
[4].[Online] [Cited: November 10, 2008.]
http://www.lerparaver.com/mobilidade_comportamentos.htm.
[5].Kay, L., Electronic Aids for Blind Persons: an Interdisciplinary Subject, IEEE
Proceedings, Vol. 13 1, N. 7,1984 pp. 559-576.
[6].[Online] [Cited: December 10, 2008.]
http://www.eyeofthepacific.org/electronic%20aids.htm.
[7].[Online] [Cited: November 10, 2008.] http://www.batcane.com
[8].Nikhil Ichalkaranje,A. Ichalkaranje,L. C. Jain, Intelligent paradigms for assistive
and preventive healthcare, Springer 2006, Vol. 19.
[9].[Online] [Cited: November 10, 2008.] http://www.ataraxia.pt/produtos.php?id=6001
[10].[Online][Cited:November10,2008.]
http://www.megaserafim.pt/index.php?page=shop.product_details&category_id=53&fly
page=shop.flypage&product_id=86&option=com_virtuemart&Itemid=26
[11].[Online] [Cited: November 10, 2008.]
http://www.batcane.com/ultracane_demonstrator.htm
[12].Mark M. Uslan,American Foundation for the Blind,Alec F. Peck,William R.
Wiener , Access to mass transit for blind and visually impaired travelers, American
Foundation for the blind, July 1990, pp.148-149
[13].[Online] [Cited: November 15, 2008.] http://www.batforblind.co.nz .
[14]. José Mira, José Ramón Álvarez, Mechanisms, symbols, and models underlying
cognition, Springer, June 2005
[15].[Online] [Cited: November 15, 2008.]
http://www.eyeofthepacific.org/electronic%20aids.htm .
[16].[Online] [Cited: November 17, 2008.]
http://www.engin.umich.edu/research/mrl/00MoRob_22.html.
http://www.batcane.com/http://www.batforblind.co.nz/
ELECTRONIC CANE DEVELOPMENT CHAPTER 2 – STATE OF THE ART
45
[17].[Online] [Cited: November 17, 2008.] http://www.nfbcal.org/nfb-rd/1405.html .
[18].[Online] [Cited: December 2008, 5.]
http://www.tiflotecnia.com/produtos/fichas_tecnicas/ft_handguide.pdf .
[19].William R. Wiener and Richard L. Foundations of orientation and Mobility, 2nd
edition Bruce B. Blash. s.l. : Welsh Editors 1997.
[20].[Online] [Cited: January 25, 2009.]
http://www.ddaware.co.uk/index.php?option=com_content&view=article&id=54&Itemi
d=75
http://www.ddaware.co.uk/index.php?option=com_content&view=article&id=54&Itemid=75http://www.ddaware.co.uk/index.php?option=com_content&view=article&id=54&Itemid=75
CHAPTER 2 – STATE OF THE ART ELECTRONIC CANE DEVELOPMENT
46
47
3 Background
Summary
Some clarifications regarding the working functionalities of the devices used in
this project are explained in this chapter.
3.1 Sensors
3.2 Sensor SRF02
3.3 Microcontroller
3.4 Antenna
CHAPTER 3 – BACKGROUND ELECTRONIC CANE DEVELOPMENT
48
3.1 Sensors
A sensor allows analyzing the surroundings, which might be temperature, light or
even the measurement of distances. These sensors can be classified as transducers. A
transducer transforms one type of energy into another, for example light, heat or
movement into electric energy.
During the years, the expansion of this technology has resulted in numerous
profits, such as the chance to amplify the efficiency on the operation of an engine, the
realization of investigations with greater precision on less time and even the
measurement of distances in order to avoid, for instance, collision with obstacles.
3.1.1 Ultrasonic Sensors
The ultrasonic sensor or sonar (an acronym for SOund Navigation And Ranging),
emits waves impossible to hear to humans, checking the reflection on a surface or object
present in its course [1].
Ultrasonic sensors sense targets made of almost any material; they are able to detect
clear, transparent and shiny targets as easily as dark and opaque materials [1].
3.1.1.1 Principle of operation
These types of sensors are based on a transmitter which transmits a small tone
and a receiver that collect the echo that occurs when an object reflects [2]. For
measurements of distances (d), it is calculated the time among the transmitted and the
received sound wave.
As illustrated in Figure 18, an ultrasonic wave is sent (in green), which in the
presence of an object (in blue) is reflected in the form of an echo (in orange), returning
to the receptor.
ELECTRONIC CANE DEVELOPMENT CHAPTER 3 - BACKGROUND
49
Figure 18: Obstacle detection explanation
3.1.1.2 Distance measurement
The sensor generates an ultrasonic pulse which propagates through the
transmission and is echoed by a reflection surface, as seen in Figure 18. So the distance
can be estimated using the formula:
𝑑 = 𝑣𝑡 (eq. 1)
In equation 1, 𝑣 is the velocity of propagation of the ultrasonic wave and 𝑡 is the
time elapsed between the transmission and the reception of an energy pulse. Besides the
time of transmission it must be taken into account the time to receive the echo.
Theoretically this time is equal to the transmission one (equation 2). So in equation 1 to
calculate the distance traveled by the wave it has to be taken into account the two
equations. Therefore, in order to determinate the distance of detection for obstacles,
equation 2 has to be divided by two (equation 3).
𝑡 = 𝑡𝑡𝑟𝑎𝑛𝑠𝑚 + 𝑡𝑟𝑒𝑐𝑒𝑝𝑡𝑖𝑜𝑛 𝑎𝑛𝑑 𝑡𝑡𝑟𝑎𝑛𝑠𝑚 = 𝑡𝑟𝑒𝑐𝑒𝑝𝑡𝑖𝑜𝑛 (eq. 2)
CHAPTER 3 – BACKGROUND ELECTRONIC CANE DEVELOPMENT
50
𝑑𝑜𝑏𝑠𝑡𝑎𝑐𝑙𝑒 =1
2× 𝑣𝑡 (eq. 3)
For example, if the obstacle is in a range of 1 meter, the distance calculated will
be 2 meters (1 meter for the transmission wave and 1 meter for the echo received).
As the sensor will be operating generally in air, the propagation speed of the
pulses in the air is 346 meters per second (25 ºC) [3].
3.1.1.3 Benefits
Ultrasonic sensors have some benefits, such as [4]:
Excellent suppression of the background with a trustworthy detection;
Detection by ultrasound without direct contact with the object and also
measuring the distance to it;
Highly accurate measurements;
Large scanning ranges;
Low cost;
No central blind spot;
Quality beam characteristics;
Low power requirement, good for a battery based system [4].
3.2 Ultrasonic SRF02
The SRF02 is a single transducer ultrasonic rangefinder in a small footprint PCB.
It operates using both I2C and Serial interfaces. Serial interface is a standard TTL level
UART format at 9600 baud, 1 start, 2 stop and no parity bits. It permits to be connected
directly to the serial ports on any microcontroller. SRF02 has new commands such as
the fact to include the ability to send an ultrasonic burst on its own without a reception
cycle or to perform a reception without the preceding burst. The minimum detection
ELECTRONIC CANE DEVELOPMENT CHAPTER 3 - BACKGROUND
51
range of this sensor is around 15 cm (6 inches) and it has the ability give distance
information in µs, cm or inches.
It can operate in two modes: I2C mode and Serial Mode as seen before. To use
serial mode the “Mode” pin has to be connected to 0V (Ground) and to the mode I2C it
has to left unconnected or tied to +5Vcc.
Inter-Integrated Circuit (I2C) was invented by Philips and usually is used to join
low-speed peripherals to a motherboard, embedded system or cellphone. Serial Data
(SDA) and Serial Clock (SCL) are the only two bidirectional open-drain lines, pulled up
with resistors. In general it is used voltages around +5V or +3.3V, however systems
with higher or lower voltages are allowed [5].
3.3 Microcontroller
The microcontroller used to the development of this project was the ATmega16. It
is a common low-power CMOS 8-bit based on the AVR enhanced RISC architecture. It
executes powerful instructions in a single clock cycle, what makes the ATmega16 to
achieve throughputs approaching 1 MIPS per MHz, allowing the system to optimize
power consumption versus processing speed, (datasheet annexed) [6].
CHAPTER 3 – BACKGROUND ELECTRONIC CANE DEVELOPMENT
52
3.3.1 Atmega16 pin description
A detailed description of ATmega16 (Figure 19) is presented in the next sub-
chapters.
Figure 19: ATmegs16 Pinout
VCC - Digital supply voltage; GND – Ground
The information about the pins of the microcontroller ATMEGA16 presented
below was transcribed from the datasheet annexed.
An explanation of the Port A and Port B is given and for the rest of the ports
they can be consulted at the datasheet annexed.
Port A (PA7 to PA0)
Port A serve as the analog inputs to the A/D Converter and an 8-bit bi-
directional I/O port, if the A/D Converter is not used. Port pins can give internal pull-up
resistors (selected for each bit). The Port A output buffers have symmetrical drive
characteristics with both high sink and source capability. The Port A pins are tri-stated
when a reset condition becomes active, even if the clock is not running.
ELECTRONIC CANE DEVELOPMENT CHAPTER 3 - BACKGROUND
53
Port B (PB7 to PB0)
Port B is an 8-bit bi-directional I/O port with internal pull-up resistors (selected
for each bit). The Port B output buffers have symmetrical drive characteristics with both
high sink and source capability. The Port B pins are tri-stated when a reset condition
becomes active, even if the clock is not running.
RESET
These pin corresponds to Reset Input. A low level on it terminal for more than
the minimum pulse length will generate a reset, even if the clock is not operating.
XTAL1
This pin corresponds to the Input of the inverting Oscillator amplifier and input
to the internal clock operating circuit.
XTAL2
This the Output from the inverting oscillator amplifier.
AVCC
The supply voltage pin for Port A and the A/D Converter is the AVCC. It has to
be connected to VCC, even if the ADC is not used. During the use of the ADC, this pin
should be connected to VCC using a low pass-filter.
AREF
AREF is the analog reference pin for the A/D Converter [5].
3.3.2 ADC – Analog to digital converter
The ATmega16 has incorporated a 10-bit successive approximation ADC. This
is connected to an 8-channel Analog Multiplexer which permits an 8 single-ended
voltage inputs constructed from the pins of PortA. The device also supports 16
differentials voltage input combinations: ADC0, ADC1, ADC2 and ADC3.
CHAPTER 3 – BACKGROUND ELECTRONIC CANE DEVELOPMENT
54
A Sample and Hold circuit is also able on the ADC which make certain that the
input voltage to the ADC is held at a constant level during the conversion [6].
3.3.2.1 Operation
Through successive approximations the ADC switches an analog input voltage
to a 10-bit digital value. GND will be minimum value considered and the maximum
value is the voltage on the AREF pin minus 1 LSB. The analog input channel and
differential gain are selected by writing to the MUX bits in ADMUX.
The information from the ADC is a 10-bit result and it is presented in the ADC
Data Registers: ADCH and ADCL.
If the result is no more than 8-bits precision and left adjusted, it is sufficient to
read ADCH. Otherwise, ADCL should be read first, then ADCH, to make sure that the
content of the Data Registers are from the same conversion. Once ADCL is read, ADC
access to Data Registers is blocked. The ADC has its own interrupt which can be
triggered when a conversion completes. When ADC access to the Data Registers is
forbidden to read the ADCH and ADCL, otherwise the interrupt will trigger even if the
result is lost [6].
3.3.2.2 Starting a conversion
To start a single conversion a logical one has to be written on the ADC Start
Conversion pin, ADSC. This bit keeps in high level as long as the conversion is in
progress and it will be cleared by hardware when the conversion is completed [6].
ELECTRONIC CANE DEVELOPMENT CHAPTER 3 - BACKGROUND
55
3.4 Antenna
An antenna (Figure 20) is a transducer able to transmit or receive
electromagnetic waves. They convert electromagnetic waves into electrical currents or
vice versa. An antenna is used in systems such as radio and television broadcast, point-
to-point radio communication, wireless LAN, radar and space exploration [7].
An antenna is considered simply as an arrangement of one or more conductors.
In the process of transmission, a voltage is applied on the terminal of the antenna and an
alternating current is created, which causes the conductors to radiate an electronic field.
In the reception process the opposite happens: an electromagnetic field from a different
source provokes an alternating current in the conductors and an equivalent voltage at the
antenna’s terminals is created [7].
Figure 20: Antenna: Electromagnetic schematic
3.4.1 RF – Radio Frequency
Radio frequency (RF) is a rate of oscillation of an electromagnet radiation in the
range of about 3 Hz to 300 GHz. This range matches to the frequency of alternating
current electrical signals employed to create and identify radio waves. [8].
http://en.wikipedia.org/wiki/Oscillationhttp://en.wikipedia.org/w/index.php?title=Electromagnet_radiation&action=edit&redlink=1http://en.wikipedia.org/wiki/Hzhttp://en.wikipedia.org/wiki/Alternating_currenthttp://en.wikipedia.org/wiki/Alternating_currenthttp://en.wikipedia.org/wiki/Electrical_signalhttp://en.wikipedia.org/wiki/Radio_waves
CHAPTER 3 – BACKGROUND ELECTRONIC CANE DEVELOPMENT
56
3.4.2 RF module
The concept for RF module can be considered simple. It is the join of a
transmitter and a receiver part which permit the user to simply send serial data, control
robots and other wireless information. Combining the RF receiver and the RF
transmitter a link very consistent can be produced and a transfer of wireless data can be
established, not including any additional work processor. These have usually low power
requirements, ideal to be feeding by batteries [9], being one of the requirements of the
e-Cane project.
3.5 References
[1].[Online] [Cited: November 6, 2008.]
http://www.maxwellbohr.com.br/downloads/Tutorial%20Eletronica%20-
%20Aplicacoes%20e%20funcionamento%20de%20sensores.pdf .
[2].[Online] [Cited: November 6, 2008.] http://www.honeywell-
sensor.com.cn/prodinfo/sensor_ultrasonic/technical/98ib81.pdf .
[3].C. Baukal Jr., The John Zink Combustion Handbook (Industrial Combustion Series),
CRC Ed, 2001.
[4].[Online] [Cited: December 12, 2008.]
http://www.sick.com.br/br/produtos/sensoresindustriales/sensoresultrasom/pt.html.
[5]. Paret, D. e Fenger. C.; “The I2C Bus from Theory to Practice”, Wiley and
Sons.1997
[6].[Online] [Cited: June 20, 2009.] http://www.atmel.com/
[7].John Volakis, Antenna Engineering Handbook, Fourth Edition, McGraw-Hill
Professional, Wiley June 2007.
[8].Devendra Misra, Radio-frequency and microwave communication circuits: analysis
and design, 2 nd Edition 2004.
[9].[Online] [Cited: February 20, 2009.] http://www.tato.ind.br/files/TXMRXM.pdf .
http://www.maxwellbohr.com.br/downloads/Tutorial%20Eletronica%20-%20Aplicacoes%20e%20funcionamento%20de%20sensores.pdfhttp://www.maxwellbohr.com.br/downloads/Tutorial%20Eletronica%20-%20Aplicacoes%20e%20funcionamento%20de%20sensores.pdfhttp://www.sick.com.br/br/produtos/sensoresindustriales/sensoresultrasom/pt.htmlhttp://www.atmel.com/http://www.amazon.com/exec/obidos/search-handle-url/ref=ntt_athr_dp_sr_1?%5Fencoding=UTF8&sort=relevancerank&search-type=ss&index=books&field-author=John%20Volakishttp://www.tato.ind.br/files/TXMRXM.pdf
57
4 e - Cane development
Summary
In this chapter, the design and the development of the e-Cane are explained and all
the devices used in the prototype are detailed.
4.1 e - Cane Project overview
4.4 Components, Acronyms and values
4.2 Ultrasonic sensors
4.3 Detection Methods
4.5 Microcontroller
4.6 Bracelet
4.7 Micro motor C-6070
4.8 Antenna: RF module
CHAPTER 4 – E-CANE DEVELOPMENT ELECTRONIC CANE DEVELOPMENT
58
4.1 e - Cane Project overview
In the e-Cane development some requirements were defined: it should be a low-
cost prototype, it should have low power consumption and it should have small
dimensions, in order to have a portable system to insert both in the cane and the
bracelet.
The project initially began with a research regarding electronic schemes to drive
the sensors MA40A5.
Given that the reference voltage should have values that could be provided by a
small battery, some of the electronic configurations could only be used for laboratory
tests. Circuits with voltage reference between - 15 V and +15 V or between -18V and
18V are very commons; however it can only be applied in laboratory tests. Since the
project has the aim to be portable, it could not operate within these values.
A scheme with reference voltage between 0V and 9V was tested and
implemented. Since the portable system should be small, in order to detect obstacles on
the left side, another sensor was chosen. It should be a sensor that had already
incorporated all the associated electronics in a small size. So, the sensor SRF02 was
chosen, tested and incorporated on the prototype.
Using the microcontroller ATMEGA16 to control and activate all the processes, a
C programming in language C was developed.
After testing the sensors and the programming, other search was made. The
warning system using micro motors both on the wrist and cane had to be tested as well
as the RF modules, with the purpose to promote the communication between the
microcontroller and the bracelet.
The Block Diagram (Figure 21) shows an overview of the main processes of the
project.
ELECTRONIC CANE DEVELOPMENT CHAPTER 4 – E-CANE DEVELOPMENT
59
Figure 21: Microcontroller Block Diagram
As illustrated in Figure 21 the microcontroller ATmega16 can be considered as
the center of the all development, being responsible for:
- Sending a square wave to the sensor MA40A5 (activation of the sensor);
- Making operate the SRF02;
- Receive the signals from the detections;
- Switching on the micro motor;
- Sending information through the RF module in order to switch on the micro
motor at the bracelet.
4.2 Ultrasonic sensors
In order to make a distinction between both left and right/front side of the user, it
was necessary to use two ultrasonic sensors. At the beginning it was thought to use two
MA40A5 sensors; however its implementation would have physical dimensions that
would exceed the space available on the cane.
So, two different kinds of ultrasonic sensors were used: the MA40A5 and the
SFR02 to detect obstacles both left and right side, as explained in the next section. The
first one was used to detect obstacles both at front and right side of the user, and the
second one to detect obstacle on the left side of the user.
CHAPTER 4 – E-CANE DEVELOPMENT ELECTRONIC CANE DEVELOPMENT
60
4.3 Detection Methods
Using the sensors integrated with the cane both on the front/right and left, a large
range compared to the normal use of the white cane is achieved. As it is possible to see
in Figure 22, the expected range (d) from the use of the sensors MA40A5 increases,
giving to the user a better perspective of what to expect.
Figure 22: Range using sensors
Therefore using the sensor SRF02 the confidence also increases (Figure 23),
because the user has a greater sense of the space, since the obstacles on the left side will
also be detected. As a result, the user is able to produce a mental map of the spaces and
on a near future may move in these places with more independence.
Figure 23: Left detection range
ELECTRONIC CANE DEVELOPMENT CHAPTER 4 – E-CANE DEVELOPMENT
61
As in Figure 23, two different distances, d1 and d2, are used. This was designed
so that the movement of the left arm does not interfere with the detection of obstacles,
since the reading could be obstructed by this movement. If that happens the user of the
cane could be misled because the arm would be constantly detected by the sensor and
therefore they would be alerted to the presence of obstacles, which were not there. In
the tests d1 was considered as 40 cm and d2 as 110 cm, making a total range of 150 cm.
An explanation of each sensor is given in the next sections.
4.3.1 MA40A5
The ultrasonic sensors chosen to read the signals coming from both front and right
side of the user were the MA40A5 (Figure 24). They have a working range of 0.6 to
20ft (18 cm to 6m) with a nominal frequency of 40 KHz (datasheet in appendix A).
Figure 24: Ultrasonic Sensors
The sensor consists of a transmitter and a receiver part explained below.
4.3.1.1 Transmitter
The first part of the schematic consists of an oscillator, responsible for creating
one signal with the frequency of 40 KHz to be sent to the ultrasonic emitter.
The oscillator consists of an ICM755, a CMOS timer that provides a
significantly improved performance over the standard NE/SE555. It is also a stable
controller capable of producing accurate time delays or frequencies. To produce a
square wave with the required frequency, it was used the configuration shown in Figure
25.
CHAPTER 4 – E-CANE DEVELOPMENT ELECTRONIC CANE DEVELOPMENT
62
Figure 25: ICM755 as “Astable operation”
In this circuit the frequency is given by the equation:
F= 1
ln 2 𝑅𝐴+2𝑅𝐵 ∗𝐶1 (eq. 4)
4.3.1.2 Emitter Schematic
Using equation 4, the emitter schematic was developed and it is presented in
Figure 26. The potentiometer (R5) was used, in order to calibrate the circuit to produce
the frequency of 40 KHz.
Figure 26: Emitter
ELECTRONIC CANE DEVELOPMENT CHAPTER 4 – E-CANE DEVELOPMENT
63
The tests made to this circuit are presented in Section 6.1.
4.3.1.3 Receptor
The receiver part is more complex than the transmitter part, because the strength of
the echo received can be very weak, being proportional to the distance. In other words,
if the sensor detects an obstacle further away from the receiver, the signal received will
be weak. Therefore, it was necessary to reinforce the signal and also to filter it, in order
to extract the desired information.
4.3.1.4 Block diagram
In order to understand the implemented project, a block diagram was developed
(Figure 27).
Figure 27: Block diagram of the Receptor
A detailed description of the processes is presented below,
Bandpass filter and amplifier- Since the entire system operates at 40
KHz, a bandpass filter is implemented to separate out the unnecessary frequency,
components or noise (Figure 28).
CHAPTER 4 – E-CANE DEVELOPMENT ELECTRONIC CANE DEVELOPMENT
64
Figure 28: Band Pass Filter and Amplifier
At the first and second stage the gain is given by equation 5, which refers to the
inverse amplifier gain (Figure 29). Therefore, the gain of the two stages is 330 times (33
times at the first stage and 10 times at the second one).
After this process the output (Vamp) is connected to the peak detector.
Figure 29: Inverter amplifier
Peak Detector - The peak detector sense the received ultrasonic signal. It
is half-wave rectification circuit with diodes. The DC voltage according to the level of
the detection signal is output to the capacitor. The circuit implemented is shown in
Figure 30.
ELECTRONIC CANE DEVELOPMENT CHAPTER 4 – E-CANE DEVELOPMENT
65
Figure 30: Peak Detector
Comparator – The output of the peak detector is connected to an input of
the microcontroller. The ADC in the microcontroller, as explained in section 3.3.2, can
read this information. So, connecting it to the input ADC0 existing in the
microcontroller and by software, it can be compared the value read to the reference
value. If the value read is higher than the reference value, an obstacle was detected, and
the microcontroller will set on the micro motor implemented in the cane.
4.3.1.5 Receiver circuit
The receiver circuit consists of the combinations of the band pass filter with the
peak detector, as seen in Figure 31.
Figure 31: Receiver circuit
CHAPTER 4 – E-CANE DEVELOPMENT ELECTRONIC CANE DEVELOPMENT
66
The experiments made during the development of the receiver part, can be seen
in section 6, where the illustrations of the tests are presented and explained.
4.3.1.6 General Schematic
The final schematic of the sensor consists of the combination of the two parts
explained before (Figure 32).
Figure 32: Ultrasonic Schematic
The circuit has a power supply between 0V (V-) and 9V (V+). The 7809
(Voltage regulator) is responsible to sustain that voltage. As it is possible to see in
Figure 32, the circuit is divided in three main parts:
(1) Emitter
(2) Receptor (Band pass filter and Amplifier)
(3) Peak Detector
ELECTRONIC CANE DEVELOPMENT CHAPTER 4 – E-CANE DEVELOPMENT
67
After some tests, the implementation was possible as can be seen in chapter 6 at
the laboratory results.
4.4 Components, Acronyms and Values
The major components used in the e - Cane development are listed in Table 4,
including all the acronyms employed.
The electronic components, such as resistors and capacitors, used in the
development of the cane are illustrated in the tables 5 and 6.
Table 4: Major Components listing and Acronyms
Components Type Acronym
Ultrasonic Transmitter MA40A5S Tx
Ultrasonic Receiver MA40A5R Rx
Ultrasonic range finder SRF02 SRF02
Op-amp LM358N IC4
Diode 1N5819 D
Voltage Regulator 7809 IC1
Comparator LM311 LM311
555 Timer ICM755 IC3
Transistor 2N3904 Q1
RF Module RRFQ2/RTFQ2 RRFQ2/RTFQ2
Table 5: Resistor values
Resistor Value Resistor Value
R1 1KΩ R7 10 KΩ
R2 560 Ω R8 330KΩ
R3 10 KΩ R9 100KΩ
R4 10 KΩ R10 10 KΩ
R5 20 KΩ R11 10 KΩ
R6 10 KΩ
CHAPTER 4 – E-CANE DEVELOPMENT ELECTRONIC CANE DEVELOPMENT
68
The resistors, R1- R5, were used at the emitter part (Figure 26) of the sensor
development. In the process of Band Pass Filter and Amplifier (Figure 28), the resistors
R6 – R11 were used.
Table 6: Capacitor values
Capacitor Value
C1 1 nF
C2 1 nF
C3 1 nF
C4 1 nF
C5 10 nF
The C1 value was used at the emitter part of the development of the sensor
MA40A5 (Figure 26). The capacitors, C2 and C3, were used on the process of Filtering
and Amplifying of the echo signal (Figure 28) and C4 was used at the peak detector
(Figure 30). The last capacitor C5 was used in the final schematic of the sensor (Figure
32).
4.4.1 SRF02 Ultrasonic range finder
The sensor SRF02 was used to detect the obstacles on the left side of the user as
explained in section 4.3. The choice of this sensor was made taking into account its
characteristics. Since that it already has all the processes of the block diagram of the
section 4.3.1.4 in a small size, it could be easily integrated to the cane without exceed
the space available at the prototype (Figure 33).
Figure 33: SRF02 ultrasonic range finder
ELECTRONIC CANE DEVELOPMENT CHAPTER 4 – E-CANE DEVELOPMENT
69
In order to read the distance measure and adjust the sensor by the use of a
computer the mode I2C was selected (Figure 34). This mode was chosen because of the
characteristics seen in 3.2.
The "Mode" pin should be left unconnected, since it has an internal pull-up
resistor. The SCL and SDA lines should have a pull-up resistor to +5v somewhere on
the I2C bus and it is suggested to use resistors of 1.8kΩ [1] [2].
Figure 34: SRF02 – I2C Mode
4.5 Microcontroller
The microcontroller is responsible to generate and send the pulses that activate the
transmitter part of the sensor. It works like a switch (on - off), that will permit to
receive, during the “off time”, an echo signal coming from the obstacle (when detected).
As explained in section 3.1.1.2, the distance is given by equation 2:
𝑑 = 1
Recommended