STUDY ON VERTICAL-AXIS WIND TURBINES USING STREAMTUBE AND
DYNAMIC STALL MODELS
BY
DAVID VALLVERDU
Treball Final de Grausubmitted in partial fulfillment of the
requirements for the degree ofEnginyeria en Tecnologies Aeroespacials
in Escola Te`cnica Superior dEnginyeria Aerona`utica i Industrial de TerrassaUniversitat Polite`cnica de Catalunya
as a result of International Exchange program withArmour College of EngineeringIllinois Institute of Technology
Advisor Dietmar Rempfer
Chicago, IllinoisJune 2014
c Copyright byDAVID VALLVERDU
June 2014
ii
ACKNOWLEDGEMENT
The production of this report wouldnt have been possible without the guid-
ance and trust that my professor advisor, Dr. Dietmar Rempfer, deposited on me.
Also, the invaluable dedication and help of my fellow office college and Master Gradu-
ate, Peter Kozak, has been decisive to my success and critical to overcome all obstacles
and issues encountered. Thanks a lot to the rest of my office colleagues, who helped
me and made my time working in IIT much more entertaining. Finally, I dedicate
this report to all my old friends and family at home, specially my parents and sister
for their support, and all the new friends I have made in this exciting stay in Chicago.
iii
TABLE OF CONTENTS
Page
ACKNOWLEDGEMENT . . . . . . . . . . . . . . . . . . . . . . . . . iii
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
LIST OF SYMBOLS . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
LIST OF ABBREVIATIONS . . . . . . . . . . . . . . . . . . . . . . . xii
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
CHAPTER
1. INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1. Energy consumption . . . . . . . . . . . . . . . . . . . 11.2. Wind turbines . . . . . . . . . . . . . . . . . . . . . . 21.3. Performance prediction of VAWTs . . . . . . . . . . . . 8
2. STREAMTUBE MODEL . . . . . . . . . . . . . . . . . . . . . . . 10
2.1. Concepts . . . . . . . . . . . . . . . . . . . . . . . . . 102.2. Theory development . . . . . . . . . . . . . . . . . . . 112.3. Computational algorithm . . . . . . . . . . . . . . . . . 202.4. Results . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3. DYNAMIC STALL MODELS . . . . . . . . . . . . . . . . . . . . . 30
3.1. Concepts . . . . . . . . . . . . . . . . . . . . . . . . . 303.2. Theory development . . . . . . . . . . . . . . . . . . . 313.3. Computational algorithm modifications . . . . . . . . . . 363.4. Results . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4. WAKE INTERACTION . . . . . . . . . . . . . . . . . . . . . . . 49
4.1. Concepts . . . . . . . . . . . . . . . . . . . . . . . . . 494.2. Theory development . . . . . . . . . . . . . . . . . . . 504.3. Algorithm modification . . . . . . . . . . . . . . . . . . 534.4. Results . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5. CONCLUSION . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.1. Summary . . . . . . . . . . . . . . . . . . . . . . . . . 585.2. Further work . . . . . . . . . . . . . . . . . . . . . . . 59
BIBLIOGRAPHY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
APPENDIX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
iv
A. SINGLE AND MULTIPLE STREAMTUBE MODELS . . . . . . . . . 64A.1. Single streamtube model . . . . . . . . . . . . . . . . . 65A.2. Multiple streamtube model . . . . . . . . . . . . . . . . 67
B. OBTENTION OF THE LIFT AND DRAG CURVES FOR NACA 0021 69
C. DYNAMIC STALL NEEDED EXPRESSIONS . . . . . . . . . . . . . 72C.1. Gormont method . . . . . . . . . . . . . . . . . . . . . 73C.2. Berg modification . . . . . . . . . . . . . . . . . . . . 74C.3. Strickland adaptation . . . . . . . . . . . . . . . . . . 74C.4. Computational algorithm modifications . . . . . . . . . . 74
v
LIST OF TABLES
Table Page
2.1 Wind turbine characteristic values . . . . . . . . . . . . . . 25
vi
LIST OF FIGURES
Figure Page
1.1 Worldwide energy consumption in quadrillion of BTU. FromEIA [8]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Worldwide net electricity generated in quadrillion of BTU.From EIA [8]. . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Classification according to rotation axis. . . . . . . . . . . 3
1.4 Characteristic power coefficient diagrams of wind turbines. 4
1.5 Drag (Savonius) and Lift (Darrieus) VAWTs. . . . . . . . 7
1.6 H-rotor Darrieus VAWT. . . . . . . . . . . . . . . . . . . 7
2.1 Scheme of the flow velocities and forces from the bladepoint of view. is a unit vector tangent to the blade. . . . . . 13
2.2 Scheme of the DMST discretization of a VAWT domain. . 16
2.3 Flowchart of the calculation of 1((j)). . . . . . . . . . . . 22
2.4 Flowchart of the calculation of 2((j)). . . . . . . . . . . . 23
2.5 Flowchart of the calculation of CP . . . . . . . . . . . . . . 24
2.6 CP against TSR. . . . . . . . . . . . . . . . . . . . . . . . . 26
2.7 Angle of attack for different dynamic stall models. . . . . 27
3.1 The two different values from which the CdynL slope is cal-culated. In this example, the value used would be the slope of thedotted line, because it is lower. . . . . . . . . . . . . . . . . . 33
3.2 Flowchart of the calculation of 1((j)) for the dynamic stall
modification. . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3 Comparison of the power coefficient outputs for differentdynamic stall models. . . . . . . . . . . . . . . . . . . . . 39
3.4 Angle of attack for different dynamic stall models. . . . . 40
3.5 Angle of attack for different dynamic stall models. PlainDMST ref is the actual DMST . . . . . . . . . . . . . . . . 42
3.6 Blade torque coefficient for different dynamic stall models. 43
3.7 Blade lift coefficient for different dynamic stall models againstangle of attack. . . . . . . . . . . . . . . . . . . . . . . . . 44
3.8 Effective angle of attack for plain DMST and Berg model. 45
vii
3.9 CP against TSR with Berg dynamic stall model. . . . . . . 46
3.10 Real and effective angle of attack for Berg model. . . . . . 48
4.1 Visualization of the vorticity for TSR = 3 [9]. . . . . . . . . 50
4.2 Effective angle of attack comparison between Kozak andVallverdu results for TSR = 3 [10]. . . . . . . . . . . . . . 51
4.3 Flowchart of the calculation of CP for the dynamic stall andwake modification. . . . . . . . . . . . . . . . . . . . . . . 53
4.4 Effective angle of attack for DMST with Berg and wakemodification. . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.5 CP against TSR with Berg dynamic stall and with/withoutwake interaction models. . . . . . . . . . . . . . . . . . . . 56
4.6 Torque coefficient of one blade for TSR = 4 using Berg model. 56
4.7 CP against TSR with Berg dynamic stall and wake interac-tion models. . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.1 Former GUI used to interact with Vallverdus code. . . . . 61
A.1 Scheme of the SST discretization of a VAWT domain. . . 65
A.2 Scheme of the MST discretization of a VAWT domain. . . 67
B.1 Lift and drag coefficients obtained from the Star-CCM+simulation. . . . . . . . . . . . . . . . . . . . . . . . . . . 71
C.1 Flowchart of the calculation of 1((j)) for the dynamic stall
modification. . . . . . . . . . . . . . . . . . . . . . . . . . 75
C.2 Flowchart of the calculation of CP for the dynamic stallmodification. . . . . . . . . . . . . . . . . . . . . . . . . . 76
viii
LIST OF SYMBOLS
Symbol Definition
A Section normal to the flow, a.k.a swept area
AM Berg parameter
c Blade chord length
CD Drag coefficient
CF Force coefficient
CL Lift coefficient
CL Linear lift coefficient slope
CP Power coefficient
CT Torque coefficient
CTb Blade torque coefficient
D Drag
d Unit vector with the direction of drag
dw Wakes length
dS Differential of surface
dV Differential of volume
Fx Component of the force in the flow direction
i Natural index for multiple purposes, i
i Unit vector in the x axis direction
j Natural index for multiple purposes, j
j Unit vector in the y axis direction
K Delay parameter from Gormonts dynamic stall model
L Lift
ix
l Unit vector with the direction of lift
M Mach number
n Unit vector normal to
Nb Number of turbine blades
Nth Number of divisions of the azimuthal angle
Nw Number of wakes
P Power
R Turbine rotor radius
Re Reynolds number
rw Wakes influence ratio
S Non-dimensional rate of change of the angle of attack
T Torque
t Time
tc Thickness
TSR Tip-speed ratio
st Streamtube subscript
U Free stream flow velocity
u Velocity of any perturbed flow
x Axis parallel to the wind, used in subscripts, too
y Axis normal to the wind
Y +wall Non-dimensional wall distance
Blade angle of attack
0 Angle of attack at zero lift
x
Rate of change of the angle of attack
eff Effective angle of attack
p Angle of attack modified with pitch
ref Reference angle of attack
Flight path angle with the instantaneous horizon tangent tothe blade path
t Timestep between nodes
Angular increment between nodes
Angular width of any streamtube
Boundary of the domain
Azimuthal angle
Angular velocity
Interference factor
Flow density
Solidity
Unit vector tangent to the blade path
Pitch
Domain
xi
LIST OF ABBREVIATIONS
Abbreviation Meaning
AC Alternating current
BEM Blade element method
BEMT Blade element momentum theory
BSD Berkeley Software Distribution
CFD Computational fluid dynamics
COG Center of gravity
DC Direct current
DMST Double-multiple streamtube model
DNS Direct numerical simulation
EIA U.S. Energy Information Administration
GUI Graphical user interface
HAWT Horizontal-axis wind turbine
IIT Illinois Institute of Technology
LES Large eddy simulation
MST Multiple streamtube model
RANS Reynolds-averaged NavierStokes
SST Single streamtube model
UPC Universitat Polite`cnica de Catalunya
VAWT Vertical-axis wind turbine
xii
ABSTRACT
The expected exhaustion of fossil sources of energy requires the improvement
of other renewable sources, such as wind turbines. Vertical-axis wind turbines present
very attractive performance characteristics but extremely complicated aerodynamics.
Therefore, research is still needed on this field. A code is developed in order to
apply the blade element momentum theory to these wind turbines. BEMT is shown
to give considerably reliable results, compared to its fast convergence. BEMT is
improved with dynamic stall and wake interaction modifications, in order to include
more physical effects. Modified BEMT models will help obtain fast and qualitatively
reliable data on VAWT performance. Comparisons with other authors prove that the
generated code provides data that are close to the real results.
xiii
1CHAPTER 1
INTRODUCTION
1.1 Energy consumption
Our world needs new energy sources. This is a fact of our present time. From
transportation to domestic life, including product manufacturing or any industrial
procedure, all aspects of human life require the use of some source of energy. However,
our main source, oil, will be exhausted in some decades. Moreover, its use is very
harmful to all life species inhabiting this planet. We need to do something: we need
to explore new ways to maintain our lifestyles relying on clean and renewable energies
that are virtually inexhaustible.
EIA [8] data show the worldwide energy consumption by type of energy source,
see Figure 1.1. As the reader can see, most of the energy used nowadays comes from
fossil origin coal, natural gas and most of the liquid sources are fossil energy sources.
From all the energy used in electricity consumption, Figure 1.2 shows a classification
by source. Note that still half of the electricity is generated from fossil origin sources.
However, renewable energies still play a very insignificant role in the energy generation
scene. Therefore, this report focuses on the analysis and performance prediction of a
specific renewable energy generation device: the vertical-axis wind turbines.
Thanks to our planets self-rotation, the existence of atmosphere and the in-
cidence on it of radiation energy coming form the sun, earth has a phenomena called
wind. Wind consists of huge masses of air moving on the planets surface in different
directions. Humans have used this as a source of energy since the first sailing boats
were sent to explore new lands. Later on, when windmills were invented, we were
able to use the energy of the wind, not only to propel boats, but also to perform tasks
that required titanic forces, such as pumping water or smashing wheat [1]. Nowadays,
2wind can be used to produce electricity by using wind turbines.
Figure 1.1: Worldwide energy consumption in quadrillion of BTU. From
EIA [8].
Figure 1.2: Worldwide net electricity generated in quadrillion of BTU. From
EIA [8].
1.2 Wind turbines
Wind turbines are electrical power generation devices whose energy source is
the wind. They transfer the momentum of the wind to a rotor through a set of blades
attached to it. This rotor is connected normally with some gearing system to an
3electrical AC generator. Then the output is fed into the general electrical grid. Some
wind turbines incorporated in closed circuits with low power requirements might use
a DC generator directly.
One of the main classifications of turbines is made according to the axis around
which the rotor spins. Therefore, one can find horizontal-axis and vertical-axis wind
turbines, HAWTs and VAWTs respectively. As the name suggests, HAWTs twirl
about a horizontal axis and VAWTs do so around a vertical one, both of them re-
spectively to the ground.
(a) HAWT (b) VAWT
Figure 1.3: Classification according to rotation axis.
A very important non-dimensional parameter that defines the behavior of a
wind turbine is the tip-speed ratio,
TSR = R
U, (1.1)
where is the rotational speed of the turbine, R is the tip radius of the blade and
U is the velocity of the upwind free flow before it is influenced by the presence of
the turbine. TSR is defined here because it will be used along the whole report.
A good quick guide to wind turbines can be found in [29].
41.2.1 Maximum power coefficient
According to Betz, the maximum power coefficient that any wind turbine can
give is
CPmax =Pmax
12AU2
=16
27= 0.593 . (1.2)
This result is reached by using continuity, momentum and energy conservation
in any type of turbine see [4] for the whole deduction. Therefore, it applies also
for VAWTs. If a simulation or measurement gives a higher power extraction from
the flow than the one specified by Betz limit, it is probably wrong. Figure 1.4 is
a diagram containing the characteristic power coefficient outputs of different wind
turbines against their tip-speed ratios. the ideal maximum is the Betz limit.
Figure 1.4: Characteristic power coefficient diagrams of wind turbines.
51.2.2 Comparison between HAWTs and VAWTs
Although both horizontal- and vertical-axis turbines use the same principles
to work, they present very relevant behavioral differences due to their physical ones.
To begin with, HAWTs tend to behave in a much more steady way than VAWTs do,
from the aerodynamics point of view. This is because the HAWTs plane of rotation
is normal to the flow direction. Historically, this has made HAWTs performance
characteristics much easier to predict. Hence, nowadays they are in a very advanced
optimization state in design terms almost the only improvement achievable is due
to geographic position. Observe how, in Figure 1.4, HAWTs maximum CP is higher
than that of VAWTs. In contrast, much less effort has been invested in VAWTs first
significant efforts were made by Sandia National Laboratories during the 70s [27].
Because the prediction methods and technologies including simulation and empir-
ical were too limited to cover such complicated aerodynamics with good enough
precision at reasonable costs, VAWTs still have a considerable path ahead before
being competitive [27].
Another aspect that sets both types of turbine apart is the proximity of the
blades to the supporting tower and the axis of rotation. HAWT blades extent radially
directly from the axis of rotation. This causes each blade to pass near the turbine
tower periodically, producing a deep periodic noise that has proven harmful to the
psychological human health [21]. VAWT blades, in general1, are placed at a constant
distance from the tower. This eliminates, or at least reduces dramatically, the tower-
blade interaction noises. This characteristic makes VAWTs more suitable candidates
for inhabited regions.
The fact that HAWTs rotate in a horizontal axis causes the heavy machinery
transmission and generation elements of the rotor to be placed at a height, at
least, greater than the HAWT blades. This makes HAWTs center of gravity, a.k.a.
1See Section 1.2.3
6COG, higher than that of VAWTs. Therefore, considerable effort has to be invested
in making this components as lightweight as possible. Vertical axis configuration,
instead, allows the VAWT heavy machinery to be placed at ground level. This reduces
construction and design costs. Having the gear at ground level decreases maintainance
costs, too. However, if further investigation states that active blade pitch control is
needed to optimize VAWTS, simplicity in the design will be lost. Related to this,
VAWTs are multi-directional, while HAWTs must be oriented against the wind at
any time.
Finally, HAWTs optimal rotation speed regimes, or TSR are higher than these
of VAWTs. Therefore, VAWTs may be considered safer in case of breakdown and
friendlier to the surrounding fauna, specially birds and other flying animals. This
influences sound generation too: the slower the turbine rotates, the lower are the
noise levels it reaches.
Although, according to this section, VAWTs seem to be more advantageous
than HAWTs, bear in mind that their state of development is much lower. Hence,
nowadays they are not as cost-effective as HAWTs. Complete knowledge of all the
parameters that affect VAWT performance might allow enough optimization so that
VAWTs would match HAWTs when talking about power coefficient. Hence, research
is still needed in the field to prove whether VAWTs are worth investing in or not.
1.2.3 Vertical-axis wind turbines
Vertical-axis wind turbines can be classified, also, according to the main force
they use to extract momentum from the wind. Hence, there are drag-based [20] if
they use the component of force that the flow produces on the blade parallel to it
and lift-based [12] if they use the normal component of the same force wind
turbines. Only the latter type of VAWT is potentially competitive to the common
HAWTs see Figure 1.4. Drag-based wind turbines, though, have simpler designs.
7A very common lift-based VAWT is the H-rotor type see Figure 1.6 , which
consists of a set of vertical blades rotating around a vertical axis. The design is fairly
simple and they can be simulated using 2D aerodynamics with less error than other
less simple designs.
(a) Savonius rotor (b) Darrieus rotor
Figure 1.5: Drag (Savonius) and Lift (Darrieus) VAWTs.
Figure 1.6: H-rotor Darrieus VAWT.
Another important parameter to characterize an H-rotor VAWT is the solidity,
=Nb c
2R, (1.3)
which is the ratio between the length of the chord of each blade, c, times the number
of blades, Nb, over the turbine diameter, 2R. The solidity is a representation of the
8blockage effect of the VAWT against the wind.
1.3 Performance prediction of VAWTs
Performance prediction is critical to study the feasibility of vertical-axis wind
turbines. Hence, several methods exist to do so. These are very varied. One can find
experimental methods, which observe reality, and computational simulations, which
predict the flow and turbine behavior. A general classification would be the following
[9] [27]:
CFD: computational fluid dynamics encompasses all models that simulate flowphysics and are applied using computer units. Different CFD models present
different characteristics:
BEM: blade element methods are computationally inexpensive. However
they rely on critical empirical data that must be obtained by some other
method. They are very fast and easy to apply they are useful for pre-
analyses and qualitative interpretations. First applied on fluid dynamics
by Glauert [5] and to VAWTs by Templin [28].
Vortex models are more precise than BEM, but at a higher computational
cost. They rely on stall models. Larsen [11] was the first to apply this
type of method to VAWTs.
Grid-centered methods discretize the NavierStokes equations in the vol-
ume domain of the VAWT. Therefore, they take into account the physics
of the problem more faithfully than the other CFD models. However, they
are also the most expensive methods, computationally speaking. One of
the most recent applications of grid-centered methods to VAWTs is the
one made by Kozak [9]. He used finite volume methods to perform a 2D
simulation.
Wind tunnel experiments consist on observing the flow around a wind turbine
9situated in a controlled environment. They require no previous models, but the
techniques used to obtain flow data are very complicated and expensive.
Real prototypes can be used to obtain performance data over a period of time infield situations. However, other analyses are needed to finally be able to build
a prototype with some guarantee of success.
This report focuses on developing a BEM and momentum theory code (BEMT)
[30] with MATLAB [14] and interpreting the obtained results. These results will show
that BEMT, if properly applied, proves itself quite useful, even though being based
on a fairly simplistic model.
10
CHAPTER 2
STREAMTUBE MODEL
2.1 Concepts
This chapter develops and explains the streamtube model applied to perfor-
mance prediction of vertical-axis wind turbines. Streamtube models are based on
blade element method, a.k.a. BEM, and momentum theory. The combination is
called blade element momentum theory, a.k.a. BEMT. Streamtube model is a rel-
atively simple method, compared to finite volume or vortex modeling. The main
advantage of this method is its ability to solve the domain without an internal vol-
ume mesh. However, to achieve this, the governing equations must be in integral form.
Therefore, specially in a CFD case, they undergo very important simplifications.
The result is a very fast computational method with significant error in the
final result the amount of error is very dependent on the nature of the problem
studied and, therefore, the governing equations. BEMT applications for VAWT cases
give a fair approximation of the VAWT power output, especially for lower tip-speed
ratios.
As said, BEMT applied to VAWTs is referred to as a streamtube model. As
the name suggests, all streamtube models consist of applying each governing equation
in its integral form to every one and each of the domains defined by the streamtubes.
Each streamtube connects both inlet and outlet boundaries and is parallel to the
velocity of the flow at all points. Therefore, there is no mass, momentum nor energy
neglecting thermal effects exchange between adjacent streamtubes. This means
that all components of the velocity perpendicular to the streamtubes are neglected.
Hence, the turbine is being treated as a unidirectional flow problem only. This also
means that the streamtube section expansion due to flow energy loss and continuity
11
is neglected2.
Applying governing equations in their integral form entails the need of empir-
ical data as an input to solve a turbine. Specifically, streamtube methods need the
characteristic curves for lift and drag at any given angle of attack. Also, this method
is unable to take into account turbulent effects such as wake interaction, very impor-
tant at high TSR, or the influence of dynamic stall, dominant when the VAWT is
working at low TSR and related to the empirical dependency. The following chapters
discuss these issues.
2.2 Theory development
There are several versions of the streamtube model, each of them using a dif-
ferent boundary discretization. These variations are the single, multiple and double-
multiple streamtube models, a.k.a. SST, MST and DMST, respectively.
STT, devised by Templin [28], considers the whole turbine as an actuator disk
placed inside a single streamtube. MST, introduced by Strickland [24], improves
SST by dividing the former single streamtube into multiple discrete streamtubes.
Theoretical developments for both models can be found in Appendix A.
Finally DMST, proposed by Paraschivoiu [15] [16], improves MST by consider-
ing the turbine as two separate actuator disks one for the upwind or front half-cycle
and a second one for the downwind or rear half-cycle.
All streamtube models (BEMT) follow the same principle. First, they use the
governing conservation equations to calculate the thrust force on each streamtube
the force parallel to it. Then, the same force is calculated from a load analysis.
Both expressions depend on the flow velocity. Hence, they can be coupled to obtain
2Paraschivoiu [18] proved that neglecting the streamtube section expansion,which induces spanwise velocity, does not introduce significant error relatively toother omitted effects in BEMT application to VAWTs.
12
a system of equations to solve the flow velocity field in the streamtube: the load
analysis result is introduced into the momentum loss result. From the velocity field,
all performance dependent variables of the turbine can be computed.
2.2.1 Governing equations
First of all, the three governing equations applied to any streamtube must be
defined in integral formulation. These are mass, momentum and energy conservation3,
respectively
d
dt
dV +
u n dS = 0 , (2.1)
d
dt
u dV +
u (u n) dS =
Fext (2.2)
and
d
dt
u2 dV +
1
2 u2 (u n) dS = P , (2.3)
where is the domain where these equations are applied and n is a unit vector normal
to and pointing outwards.Fext is the sum of the forces that the flow receives
and P is the power output of the portion of the turbine inside the domain. Hence,
P > 0 when the turbine is extracting energy from the flow. Bold symbols are vectors.
Otherwise, they are scalars. BEMT treats the problem as a steady case, so all time
derivate components from momentum and energy equations can be eliminated.
3Note that dynamic and other magnitudes that include dimension units sur-face, volume, force, torque, power have one less dimension than usual, because allthe development is using 2D approach. For example, for a hypothetical force, F , theunits are [F ] = N/m
13
2.2.2 Physical definitions
One needs to define the geometry of a VAWT blade parametrically. Figure 2.1
is used for this purpose.
urR
u
L
D
u
x
y
Figure 2.1: Scheme of the flow velocities and forces from the blade point of
view. is a unit vector tangent to the blade.
From it, the relative velocity (ur) of the wind from the blade reference point
of view,
urU
=
(u
U
)2+ TSR2 + 2
u
UTSR cos , (2.4)
can be computed. Also, the flight path angle,
= arctan
(TSR sin
u/U + TSR cos
), (2.5)
and the angle of attack,
= modulus
(pi +
2pi
) pi , (2.6)
14
will be needed.
Once the angle of attack is known, the lift, CL, and drag, CD, static coefficients
of the VAWT blade profile can be obtained from experimental data4,
L =1
2 c u2r CL (2.7)
and
D =1
2 c u2r CD . (2.8)
Note that the units of these forces are [N/m]: as said previously in this chapter, the
turbine is approached as a 2D problem. Hence, all dynamic magnitudes lack one
order of distance unit.
The whole force that the blade receives from the wind expressed as a function
of lift and drag components,
F = [D cos L sin ] i+ [D sin + L cos ] j , (2.9)
is used to calculate the torque that the turbine receives from each blade,
T = RF t = R (L l +D d) , (2.10)
where l = sin i+cos j, d = cos i+sin j and = cos isin j. Therefore,the power coefficient obtained from one blade,
P =1
2pi
2pi0
T d , (2.11)
is the result of averaging the instantaneous torque times the angular velocity along a
period of azimuthal angle.
4Appendix B develops how these data sere obtained.
15
2.2.3 Double-multiple streamtube model
The most precise streamtube model is DMST, because it allows to consider
the energy losses of the flow separately for the front and rear half of the VAWT. The
flow is considered to travel through two consecutive actuator disks which, in turn,
extract energy from it. Moreover, at the same time, the turbine domain is discretized
in multiple streamtubes parallel to the flow, so a different velocity of the flow can be
calculated at any position of the blade. Then, the contribution of all front and rear
half-cycle streamtubes is added together. Figure 2.2 illustrates the DMST scheme.
Observing Figure 2.2, one can distinguish five different states of the flow:
1. State: this is the free stream state. The flow is not perturbed by the turbine.It acts as the input state for Disk 1.
2. State 1: this is the state of the flow when interacting with the upwind actuator
disk, also called the front half-cycle of the turbine.
3. State e: this is the equilibrium state. In this state, the flow is considered to
be far enough from both disks, hence it is steady. This is an approximation.
In reality, state e is too close to both states 1 and 2 to allow this hypothesis.
However, DMST uses this assumption anyway, as it is a method that seeks very
fast convergence through simple modeling. State e acts as the output state for
Disk 1 and as the input state for Disk 2.
4. State 2: this is the state of the flow when interacting with the downwind actu-
ator disk, also called the rear half-cycle of the turbine.
5. State w: this is the wake state. The flow is perturbed by both Disks 1 and 2.
It acts as the output state for Disk 2.
16
R
Upwindzone
Downwindzone
Disk 1
Disk 2
One streamtube
1, st 2, st
F1, x F2,x u2ue uw
U
u1
uwu2ueu1U
A1, st A2, st
x
y
Only 1D
Figure 2.2: Scheme of the DMST discretization of a VAWT domain.
According to Figure 2.2, if one considers each streamtube of angular width
as being infinitesimally thin which means that 0 its swept area can becomputed as
A1,st = R sin st , st (0, pi) , (2.12a)
A2,st = R ( sin st) , st (pi, 2pi) , (2.12b)
where st is the value of the blade has when it is going through the middle point
of the given streamtube.
Now, conservation equations can be applied. Equation 2.1 mathematically ex-
presses the fact that there is no mass exchange between streamtubes: each streamtube
17
mass flow (mst) is constant. Therefore, for each streamtube with section Ai,st:
m = u1A1,st = u2A2,st = ct. (2.13)
Equation 2.2, once evaluated in one front and one back streamtube in the
direction parallel to the flow, gives the expressions5
m (ue U) = F1,x , (2.14a)
m (uw ue) = F2,x . (2.14b)
Similarly, from Equation 2.3, one obtains
1
2m (u2e U2) = F1,x u1 , (2.15a)
1
2m (u2w u2e) = F2,x u2 . (2.15b)
Using the interference factor: 1 = u1/U and 2 = u2/ue, and combining
Equations 2.14 and 2.15, the velocities6 of the equilibrium and wake states,
ue = U (21 1) , (2.16a)
uw = ue (22 1) , (2.16b)
and that of the rear half-cycle,
u2U
= (21 1)2 , (2.17)
are found.
5Note that, from now on, the subscript st is omitted on all forces and velocities,as they all refer only to a single streamtube
6Note that flow velocity expressions violate continuity (Equation 2.13). Inan incompressible flow, by considering that there is no streamtube expansion andno spanwise components of the velocity, flow velocity should be constant, as notedpreviously in this chapter.
18
Using the thrust coefficient expression CF1,x = F1,x/(1/2 A1,st U2), for the
front half-cycle, and CF2,x = F2,x/(1/2 A2,st u2e), for the rear one and combining
Equations 2.13, 2.14 and 2.16, the thrust coefficient expression from the conservation
analysis,
CFi,x = 4i(1 i) , i = 1, 2 , (2.18)
is obtained. However, due to the inadequacy of the unidirectional flow assumption
below 0.6, Glauert [5] proposed a linear modification to this result,
CFi,x =
1849/900 26i/15 : i < 43/60
4i(1 i) : i 43/60, i = 1, 2 , (2.19)
according to experimental data.
To be able to solve the interference factor, another expression for the thrust
at any given azimuthal angle,
Fi,x() =1
2 c u2i,r (CD cos CL sin ) , i = 1, 2 , (2.20)
is needed. This expression is obtained from load analysis. As shown in Equation 2.9,
lift and drag coefficients can be used to obtain the instantaneous thrust each blade
receives. Then, Equation 2.20 is time-averaged along one period in one single stream-
tube of width for all the Nb blades of the turbine. This results in
Fi,x =Nb2pi
i,st+/2i,st/2
Fi,x() d =Nb
2piFi,x(i,st) , i = 1, 2 . (2.21)
The reader will note that this integral is solved with a first order approximation.
Then, using the thrust coefficient expressions, together with Equations 2.12, 2.20
and 2.21, the other expression for the thrust coefficient at each streamtube,
CF1,x =
pi sin
u21,rU2
(CD cos CL sin ) , i = 1, 2 , (2.22a)
CF2,x =
pi sin
u22,rU2 (21 1)
(CD cos CL sin ) , i = 1, 2 , (2.22b)
are obtained.
19
By using Equations 2.19 and 2.22, 1() and 2() can both be computed
note that 17 participates in Equation 2.22b, so the flow going through the front
half-cycle must be solved before it can be solved in the rear half-cycle, too. Also
see that this system can be solved for any value of that is why the interference
factors are using dependence notation (). Remember that 0, so there are aninfinite number of streamtubes. Then, the first order approximation introduced in the
integral of Equation 2.21 does not limit the order of precision of the whole problem.
Instead, it will be limited by the algorithms used to solve this system and to integrate
the torque along the blade path, needed to average the output power of the turbine.
From the interference factor, all variables ((), (), velocities, force coeffi-
cients, etc.) can be obtained using the equations shown in Section 2.2.2. Then, each
blade non-dimensional torque at any given azimuthal angle is
CTb() =Tb()
1/2 cU2R=
u2rU2
(CL l + CD d) , (2.23)
according to Equation 2.10.
To obtain the whole instantaneous torque coefficient using turbine parameters,
CT () = T ()/ (1/2 AU2R), one should add the instantaneous torque of each blade.
Note that the swept area is A = 2R because this is a 2D case. Then a turbine with
Nb equidistant blades, bi, i [1, Nb], would be subject to the total torque coefficient,
CT () =
Nb
Nbi=1
CTbi
( +
i 13
2pi
). (2.24)
Note that for any Nb number of blades, distributed equidistantly, the whole torque
coefficient has a periodicity of 2pi/Nb. Also, please notice that is the azimuthal
angle of the first blade, b1.
Finally, the power coefficient that all blades produce, CP = P/(1/2 AU3),
is
CP = CP,1 + CP,2 , (2.25)
7For > pi, note that the value of 1 inserted in Equation 2.22b is 1(2pi )
20
where CP,1 and CP,1,
CP,1 CP,front = TSR2pi
pi0
CTb d , (2.26a)
CP,2 CP,back = TSR2pi
2pipi
CTb d , (2.26b)
are obtained by averaging the instantaneous power in each half-cycle, according to
Equation 2.11.
This method, although requiring some numerical calculations to solve the in-
terference factor equation and to numerically integrate the torque to obtain the power,
is very straightforward and easy to implement. However, it neglects several effects
that gain great relevance in the case of wind turbines. The most significant are the
effect of the blades working in angles of attack beyond the static stall angle, the un-
steadiness nature of the problem (which includes the effects of dynamic stall) and the
interaction of the blades and the wakes that detach from themselves. Also, the 1D
simplification introduces some error by neglecting span-wise velocity and 3D effects
on the blade.
2.3 Computational algorithm
No analytical solution of () exists, so no analytical integration of the torque
in order to get the power can be computed either. Therefore, numerical integration
is necessary to obtain the performance characteristics of the VAWT. Also, as the
resulting equation from combining Equations 2.19 and 2.22 is nonlinear, another
numerical procedure is required to solve it.
The results described in this report have been obtained by using a second-order
trapezoidal integration. Therefore, a discretization in the domain,
= piNth
(1) = 2
(j) = (1) + (j 1)
j [1, 2Nth] , (2.27)
21
was required. It consists in Nth volume-centered (j) smaller domains for each half of
the turbine in other words, j [1, 2Nth]. Note that doubling Nth means quadruplingthe number of discretization nodes (j).
Interference factor is calculated individually for each value of j. To do so,
interpolation or bisection methods are used, depending on each iteration outputs.
Afterwards, the trapezoidal integration is applied in the whole discretized domain.
Figures 2.3, 2.4 and 2.5 show the algorithm used.
MATLAB [14] is the tool that has been used to implement this algorithm and
to plot all the results. The produced code is object-oriented to ease the addition of
features in a modular way. Also, it is parametrized, so it can be used to obtain results
for different input values and turbines swiftly. The code is published in Mathworks
File Exchange website [30] with a BSD license. It also includes an example file to
show how to use it.
This code used Subashki et al. [26] MATHEMATICA [13] code as a base.
22
Start
TSR, (j)
Start with j = 1
Suppose 1
Compute 1, u1,r
Compute 1
Compute CL,1, CD,1
Compute CF1,x from Eq. 2.22a
Compute 1, from Eq. 2.19
Convergence
criteria
met?
Apply bisection
or interpolation
j = Nth? j = j + 1
1((j))
Equilibrium
yes
no
yes
no
Figure 2.3: Flowchart of the calculation of 1((j)).
23
Equilibrium
TSR, (j), 1((j))
Start with j = Nth + 1
Suppose 2
Compute 2, u2,r
Compute 2
Compute CL,2, CD,2
Compute CF2,x from Eq. 2.22a
Compute 2, from Eq. 2.19
Convergence
criteria
met?
Apply bisection
or interpolation
j = 2Nth? j = j + 1
2((j))
Postprocess
yes
no
yes
no
Figure 2.4: Flowchart of the calculation of 2((j)).
24
Postprocess
TSR, (j), 1((j)), 2(
(j))
Compute ((j)), ur((j))
Compute ((j))
Compute CL((j)), CD(
(j))
Compute CTb((j))
Compute CP 1, CP 2
Compute CP
using 2nd order
trapezoidal
integration
CP
Stop
Figure 2.5: Flowchart of the calculation of CP .
25
2.4 Results
This section discusses the results obtained from applying DMST to a Darrieus
H-rotor wind turbine with the following characteristics:
Table 2.1: Wind turbine characteristic values
VAWT characteristics
Nb 3
Re (blade) 3 105Blades profile NACA 0021
R 515 mm
c 85.8 mm
0.2499
This case is chosen because there are enough data in the literature with which
to compare results [9].
The characteristic static lift and drag curves for the profile NACA 0021 at
the specified Reynolds number have been obtained according to Appendix B. The
discretization parameter is Nth = 51, the one that proved to give enough precision at
lowest computational cost.
The curve of power coefficient against tip-speed ratio obtained for the pre-
sented case is shown in Figure 2.6. Note that at low tip-speed ratios both front and
back half-cycles of the turbine extract a similar amount of energy from the flow. How-
ever as the TSR increases, the front half of the turbine extracts more energy from the
flow. Therefore, when the same flow reaches the back half, it carries much less energy,
so the back half of the turbine cannot extract as much energy Furthermore, above
values of TSR a bit higher than 3, the front half-cycle extracts so much energy than
the rear half-cycle is actually giving some of it back to the flow, instead of extracting
it8. Hence, there is a value of TSR, about 2.7, where the balance front/back ex-
8This phenomena becomes very relevant when adding wake interaction modifi-
26
traction gives the optimum power coefficient. Although DMST is a reasonably crude
model, this characteristic is represented well enough.
1.5 2 2.5 3 3.5 4 4.5 50.3
0.2
0.1
0
0.1
0.2
0.3
0.4
0.5CP against TSR
TSR
C P
CPCP,frontCP,back
Figure 2.6: CP against TSR.
2.4.1 Effect of solidity
To appreciate the effect of solidity on the output power, the DMST simulation
has been run with the same turbine only changing the solidity value, by modifying
the diameter if the chord of each blade is changed, the Reynolds number of the
blade would change too. However, the purpose of this subsection is to see the effect
of solidity only. The results can be seen in Figure 2.7.
According to the DMST model, the bigger the solidity is, the lower is the
optimal tip-speed ratio. The maximum achievable power coefficient seems to be
maximum for the initial case, decreasing when solidity either increases or decreases.
cations to DMST. Therefore, it is discussed further in Chapter 4, where wake inter-actions are covered.
27
1.5 2 2.5 3 3.5 4 4.5 50.1
0
0.1
0.2
0.3
0.4
0.5
0.6CP against TSR
TSR
CP
= 0.1 = 0.05 = 0.2499 = 0.4
(a) Power coefficient on the whole turbine.
1.5 2 2.5 3 3.5 4 4.5 50.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45CPfront against TSR
TSR
CPfro
nt
= 0.1 = 0.05 = 0.2499 = 0.4
(b) Power coefficient on the front half-
cycle.
1.5 2 2.5 3 3.5 4 4.5 50.5
0.4
0.3
0.2
0.1
0
0.1
0.2CPback against TSR
TSR
CPba
ck
(c) Power coefficient on the back half-
cycle.
Figure 2.7: Angle of attack for different dynamic stall models.
However, remember that DMST neglects wake interactions, which is an effect that
gains relevance with solidity growth. Therefore, it might be that the optimal solidity
was lower than the one suggested by DMST.
Also note that, as increases, the front part of the turbine produces much
28
more power and the rear much less. Hence, the TSR for which the rear half-cycle
produces zero power keeps decreasing as solidity increases. This is logical, because the
larger the blades are respectively to the domain, the more energy they can extract.
When the flow first meets the turbine, it loses more energy if the solidity is higher.
Hence, when it reaches the rear part, it has less energy to be extracted. Moreover,
for the values of TSR that the back half of the turbine produces negative power, an
increase of solidity which means bigger blades relatively to the diameter implies
that more energy is given back to the flow.
2.4.2 Effect of the number of blades
The effect of the number of blades only means a change in solidity. However,
note that according to DMST, two turbines with different number of blades but same
solidity and blade Reynolds number would behave identically. This is because DMST
is not taking into account interaction between blades, which is produced, in fact, by
wake generation.
2.4.3 Comparison with other Streamtube models
As said before, DMST is the most precise version fo the three Streamtube
models. However, all three have been tested. First, Multiple and Double-Multiple
Streamtube models are compared. The main difference, of course, is that DMST
is able to distinguish the different behavior of the flow in the front and the rear
half of the turbine. This is noticed by observing the instantaneous torque for each
model at any azimuthal angle. While MST shows a symmetric distribution centered
on the 180, DMST clearly reports a different distribution between front and back
halves although the shape of the rear part is similar to the one of the front part,
because 2 depends of 1. From the computational point of view, there is not much
difference, because both models solve the interference factor at many different values
of . It is true that DMST must solve two different values of for each one of MST.
However, DMST performs even better than MST in general because the latter has
29
more problems to reach convergence, probably due to the fact that the equation
is less smooth it has to take into account both front and back halves in one only
step. The final power output is less different than that of the torque, because the
integration steps level the difference in torque. However, as said before, DMST is
worthier using because it overtakes MST both in precision and convergence speed.
When testing SST, as expected, convergence is reached much faster than both
DMST or MST, because the interference factor is solved only once in the whole
turbine. In this case, the output torque is not only mirrored from front to back halve,
but it is also symmetric in each half, centered at 90 and 270, respectively. Hence, the
precision of this method is even worse. It can be useful as a very preliminary tool to get
an idea of the turbine performance. Nonetheless, DMST is not that complicated and
slow. Morover, the generation of the code of both models is very similar. Therefore,
globally, SST is only worth it using if only very low-end computational resources are
available. General-use computers nowadays have no problems with DMST and can
solve a whole turbine for a reasonable range of TSR a few minutes.
30
CHAPTER 3
DYNAMIC STALL MODELS
3.1 Concepts
As mentioned in the previous chapter, dynamic stall plays a very relevant
role in the VAWT problem. However, static lift and drag curves have been used.
Obviously there is significant amount of error introduced by this fact. Therefore, a
lot of effort has been invested into developing modifications to the original DMST, so
that it includes these effects. Dynamic stall, opposite to the usual static stall observed
in wind tunnels and in fixed blades simulations , presents a hysteresis behavior. In
other words, if a blade changes its position, the flow does not react immediately, but
it adapts gradually to the new state within a definite interval of time. Such an effect
is only dominant at low TSR, when the turbine rotates slowly enough to allow the
development of this hysteresis cycle the magnitude of the blade movement is similar
or smaller than that of the flow movement. In high TSR cases this effect ceases to be
determinant wake interactions gain strength and become the major factor. In this
latter case, the induced velocity, R, component of the relative velocity, ur, is much
higher than the wind velocity component, U see Figure 2.1. Therefore, angles of
attack are lower, according to Equation 2.6, which leads to smaller oscillations of the
blade respectively to the relative movement of the flow.
Most of the dynamic stall models, according to [18], applied to DMST consist
of a series of semi-empirical procedures applied in the calculation of the lift and drag
coefficients of the VAWT blade. Therefore, applying a dynamic stall model to the
DMST method means computing some additional steps interlaced with the main
algorithm.
31
3.2 Theory development
In this section, several dynamic stall models are explained and compared.
These are:
3.2.1 Gormont model
Gormont [6] proposed this method to take into account dynamic stall in he-
licopter blades. It is not optimal for VAWTs, because they operate at much higher
angles of attack, but it has been used as a very strong base for later adaptations.
The Gormont method consists of applying a certain delay,, on the angle of attack,
based on hysteresis behavior. After applying this delay, the resulting reference angle
of attack is
ref = K , (3.1)
where K,
K =
1 : 0
0.5 : < 0, (3.2)
is a parameter defined according to Gormonts empirical observations.
Therefore, the delay experienced when the absolute angle of attack is increasing
is twice the one observed when it is decreasing. One possible qualitative explanation
would be the following. When the angle of attack is increasing, the flow near the
leading edge of the blade is pushed to the surface of it, making it more difficult for
the upwind flow to change its state. However, when the blade angle of attack is
decreasing, this same flow is left behind, so the upwind flow changes its state more
easily. This effect generates a discontinuity that can induce severe instabilities to the
flow surrounding the points where changes sign9.
9 is the rate of change of the absolute value of , so it is negative when theangle of attack approaches 0 and positive when it moves away from 0.
32
The term is proportional to the non-dimensional rate parameter S,
S =
c 2ur , (3.3)
which can also be interpreted as the square root of the magnitude of the leading edge
velocity of a blade rotating around its half chord point over the magnitude of the
relative wind velocity. In other words, it compares the blade movement to the flow
relative movement around it. The higher S is, the greater the applied delay. This is
coherent with what was explained in Section 3.1 dynamic stall is important for low
tip-speed ratios, when oscillations are bigger.
The slope of the line (S) decreases both with thickness over chord ratio and
Mach number of the flow relative to the blade growth. Then, the thicker the blade is
and the less compressible the flow is, the smaller is the delay on the angle of attack.
The specific expression for can be found Appendix C.
Once the delayed angle of attack, ref , is found, the modified lift and drag
coefficients can be calculated. The lift coefficient,
CdynL = CL,0(0) +m ( 0) , (3.4)
is calculated by using the potential equation with a modified slope, m, the minimum
value of either the slope of the linear part of CL or the value obtained with the follow-
ing expression: (CL(ref ) CL(0))/(ref 0). Figure 3.1 shows both mentionedslopes for an example value of ref . Also, the mathematical expression for m can be
found in Appendix C. The symbol 0 refers to the angle of attack at zero lift.
The drag coefficient,
CdynD = CD(ref ) , (3.5)
is obtained simply by using ref to extract it from the available static data.
33
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
(deg)
C L
ref = 17.5
o
CLlinear CLalternate CL
Figure 3.1: The two different values from which the CdynL slope is calculated.
In this example, the value used would be the slope of the dotted line, because it is
lower.
3.2.2 Berg modification
Berg [3] considered that the range at which helicopter blades work is much
lower than that of a VAWT, which can perfectly go beyond the stall angle of attack
(ss). Therefore, Berg theorized that the pure Gormont method might over predict
the lift and drag for high angles of attack. He proposed the following modification
for both lift,
CmodL =
CL +
[AM ssAM ssss
](CdynL CL) : AM ss
CL : > AM ss
, (3.6)
and drag10, so that both coefficients tend to the static values for very high values
of , deep into the non-linear regime. The parameter AM is set by the user of the
method. According to [3] the best option is AM = 6. However, according to [18],
some VAWTs show a better response when using AM . Note that this is thesame as using the pure Gormont method with no modifications. The results shown
10Only the lift modification is shown. The drag modification is the same expres-sion but changing all L subscripts for D. See Appendix C for the drag expression.
34
on this paper are computed using Bergs suggestion.
3.2.3 Strickland et al. adaptation
Strickland et al. [25] considered that Gormont method was developed for very
thin blades, as the typical helicopter blade. However, VAWTs typically use blades
with higher thickness over chord ratio. That is why they modified the delay so Sc = 0.
See Equation C.2 in Appendix C. Also, as the typical rotation speed of a VAWT is
much lower than that of a helicopter, the flow was considered to be incompressible
the Mach number is not used as an input parameter of the model. Finally, Strickland
et al. supposed that dynamic stall effects only occur after the angle of attack is higher
than the stall angle of attack, ss. Then, the resulting reference angle of attackis:
ref = K S S , (3.7)
where K and S are described in Equations 3.2 and 3.3, respectively. S is the sign of
as is described in Section 3.2.1. Expression for can be found in Appendix C.
From Stricklands angle of attack, lift,
CstrL =
CL() : < ss(
ref0
)CL(ref ) : ss
, (3.8)
and drag,
CstrD =
CD() : < ss
CD(ref ) : ss, (3.9)
coefficients are obtained.
3.2.4 Paraschivoiu adaptation
Paraschivoiu [17], after some experimental observation, concluded that the
part of the blade path comprised in [105, 225] is mainly dominated by turbulentaerodynamics and wake interactions. Therefore, they considered that in this region
35
dynamic stall can be neglected. Therefore, their modification basically consists of
applying Strickland adaptation only outside this azimuthal angle range. This adap-
tation might be a bit crude, because it is based on experimental data from one specific
turbine under some very particular conditions.
3.2.5 Indicial method and adaptations
Another different approach to dynamic stall modeling is the indicial method.
It was first introduced by Beddoes and Leishman [2] and first applied to VAWTs by
Paraschivoiu et al. [19]. This method consists of accepting that the total effect of lift
and drag modification due to dynamic stall results of the individual addition of differ-
ent effects. The first step consists on calculating the attached flow unsteady behavior
by using potential flow theory and the addition of unsteady empirical correlations.
Second, separation in the leading and trailing edge are taken into account. Finally,
an optional third phase introduces some corrections of the separation for deep stall,
when the angle of attack is far beyond the stall angle of attack. All these effects are
supposed to have indicial behavior. This means that they grow or decrease with time
according to lag and impulsive functions. These indicial functions are of the form
of summations of exponential functions with different coefficients and characteristic
time parameters. All modifications depend also on the rate of change over time of
the angle of attack, as did the Gormont based models.
This method, however, depends on several coefficients mainly the lag and
impulsive parameters that must be determined empirically and/or by potential
flow approximations. Also, it considerably increases the computational requirements,
because the introduced modifications must be solved by iterative methods, which
DMST must apply at every iteration of the interference factor calculation. According
to [18], the indicial method gives an overall better approximation of the dynamic stall
models than the Gormont based ones. However, for qualitative purposes the difference
is not very high compared to Berg adaptation, for example. For all these reasons,
36
the indicial method is not explained nor was developed during the redaction of this
report. More information can be found in [18]. Further development on streamtube
models must include the development of DMST code with Indicial dynamic model.
Several adaptations of the original Beddoes and Leishman model have been
applied to wind turbines in general, such as Hansen [7].
3.3 Computational algorithm modifications
In order to insert any of the described dynamic stall models into the DMST
algorithm proposed in Section 2.3, three additional steps must be introduced. Basi-
cally, Compute CL, CD box of each Figure 2.3, 2.4 and 2.5 must be substituted by the
specific calculation of the modified lift and drag coefficients. The flowchart for the
modified DMST of the front half is shown in Figure 3.2. The rest of the algorithm
can be found in Appendix C.
In the modified flowcharts, t is the time that the blade needs to travel an
arch of amplitude . Hence, it is
t =
. (3.10)
Also, note that the superscript dyn refers to any dynamic stall model, not only Gor-
monts, as suggested in the previous section. As seen in Figure 3.2, the rate of change
of the angle of attack, , and lift and drag coefficients are calculated using the ab-
solute values of the angle of attack. This is because all Gormont based models are
described for positive angles of attack. When working with < 0, all signs should
be switched. Instead, observe that this algorithm works with the angle of attack in
absolute value and, afterwards, it changes the sign of the lift if the blade is working
at < 0 note that S is the sign of . Note that this produces the same result and
is much easier to implement in a computational code.
Also note that is calculated with first order approximation, using the value
of of the previous azimuthal angle. In (1) and (Nth+1), ((j1)) is substituted by
37
Start
TSR, (j)
Start with j = 1
Suppose 1
Compute 1, u1,r
Compute 1, 1 =[1((j)) 1((j1))] /t
Compute CdynL,1 = SCdynL,1 (|1| , 1), CdynL,1 (|1| , 1)
Compute CF1,x from Eq. 2.22a
Compute 1, from Eq. 2.19
Convergence
criteria
met?
Apply bisection
or interpolation
j = Nth? j = j + 1
1((j))
Equilibrium
yes
no
yes
no
Figure 3.2: Flowchart of the calculation of 1((j)) for the dynamic stall
modification.
38
((j)). This assumption forces the angle of attack at = 0, 180 to be zero, sothat Equation 2.6 is not violated.
Dynamic stall modification is included in Vallverdus code [30].
3.4 Results
First, all models will be compared. Afterwards, once the best dynamic stall
model is chosen, the stall effect itself will be studied. To do so, a new variable has
been introduced, which is the effective angle of attack, eff ,
eff =CLCL
, (3.11)
where CL is the slope of the linear part of the lift coefficient curve for the NACA
0021 profile. It can be found in Equation B.1, in Appendix B. eff is, basically, a
normalization of the lift. However, it is useful to identify non-linear zones of the blade
path by comparing it with the actual if both angles are equal, it means that the
blade is working in the linear regime at that point of its path.
3.4.1 Comparison of different models
As said, this section is mainly aimed at comparing the different stall models
with each other and with the plain DMST model. Lets begin with the power coefficient
output for the initial case proposed in Table 2.1. The result can be seen in Figure 3.3.
The reader can see that, as explained in the theory, Gormont over-predicts
performance relatively to Berg. Also, observe that for TSR lower than 3 all stall
models predict better performance than the original DMST. This is due to the stall
happening slower in a dynamic regime than a static one, thanks to the delay intro-
duced by the hysteresis effect. Therefore, dynamic stall models predict that the time
that the blade is experiencing stall is less than what a quasi-static approach gives.
Next, the lift characteristic reference angle of attack and blade torque coeffi-
39
2 2.5 3 3.50.25
0.3
0.35
0.4
0.45CP against TSR
TSR
C P
plain DMSTGormontBerg AM = 6
StricklandParaschivoiu
Figure 3.3: Comparison of the power coefficient outputs for different dy-
namic stall models.
cient at each azimuthal angle have been obtained see Figures 3.5 and 3.6. These
two are the representation of the dynamic stall modifications. Remember that all
proposed adaptations consist of two steps: first they modify the angle of attack and
then the lift and drag coefficients from this angle of attack. Hence, Figure 3.5 shows
the first modification and 3.6 is a way to see the second one, because the torque
coefficient directly depends on the lift and drag coefficients, according to the DMST
theory.
The lift characteristic reference angle of attack for all models curves show
how the angle of attack is delayed to consider dynamic stall. Also, it shows very
well how this delay is greater when the angle of attack is increasing than when it is
decreasing. Also, specially in Figure 3.5c, note that Strickland-based models predict
40
0 50 100 150 200 250 300 350 40020
15
10
5
0
5
10
15 (deg) for TSR = 2.5
(deg)
plain DMSTGormontBerg AM = 6
StricklandParaschivoiu
(a) TSR = 2.5
0 50 100 150 200 250 300 350 40030
20
10
0
10
20
30 (deg) for TSR = 2
(deg)
(b) TSR = 2
0 50 100 150 200 250 300 350 40015
10
5
0
5
10 (deg) for TSR = 3
(deg)
(c) TSR = 3
Figure 3.4: Angle of attack for different dynamic stall models.
a less radical delay than Gormont/Berg models11. This is observed more closely in
the torque curves, where the changes of sign of affect the Gormont/Berg curves
to a higher extent than the Strickland based ones. The loss of torque according to
11Remember from the theory development that Berg and Gormont ref are thesame.
41
Gormont/Berg curves in azimuthal angle around = 90 might be caused by the
sudden update of the flow state due to the change of sign of all the accumulated
dynamic load is released when the blade starts exposing its suction surface, causing a
sudden increase of drag that brings torque down. Torque curves are also very suitable
to appreciate how Berg method is meant to soften Gormonts over-prediction at high
angles of attack.
Figure 3.7 shows the lift coefficient at any angle of attack. It is included,
mainly, to show the hysteresis effect explained in the previous Section. Please observe
how all dynamic stall models represent the dynamic delays by giving different lift at
a same angle of attack. When its absolute value is increasing, the dynamic lift does
not sense stall until a higher angle of attack than the static angle of attack, ss 10.However, when it is decreasing, the dynamic lift adapts faster to the static value. This
is due to Gormonts observation explained in Section 3.2.1: the flow adapts swifter
when the blade angle of attack is decreasing than when it is increasing. Also see
that Paraschivoiu adaptation result does not present hysteresis in some regions in
general, all other figures show the same behavior of the Paraschivoiu curves. These
are the regions where turbulence was considered dominant and, therefore, no dynamic
model was applied.
Because the Strickland model was the first and most crude adaptation to
VAWTs and the Gormont model was developed mainly for helicopters, the Berg
model is the one chosen to treat dynamic stall in this text. Also, it presents the
advantage of being parameterizable by varying AM . Finally, Berg results are more
similar to experimental measurements [18] and finite volume CFD results [9] than
the other dynamic stall models. A said in the previous section, indicial mehtods
seem to be very good at dynamic stall simulation. However, they add computational
difficulties much higher than those inherent to Berg adaptation. Streamtube models
are aimed at simple and quick qualitative studies, so it was considered that the overall
computational efficiency of the Berg model is more suitable for a DMST model than
42
0 50 100 150 200 250 300 350 40025
20
15
10
5
0
5
10
15
ref (deg) for TSR = 2.5 for lift characteristic
(deg)
plain DMSTGormontBerg AM = 6
StricklandParaschivoiu
(a) TSR = 2.5
0 50 100 150 200 250 300 350 40030
20
10
0
10
20
30
ref (deg) for TSR = 2 for lift characteristic
(deg)
(b) TSR = 2
0 50 100 150 200 250 300 350 40015
10
5
0
5
10
ref (deg) for TSR = 3 for lift characteristic
(deg)
(c) TSR = 3
Figure 3.5: Angle of attack for different dynamic stall models. Plain DMST
ref is the actual DMST .
the one of the indicial models.
Finally, this chapter contrasts Berg results with the plain DMST results. This
is done by using the effective angle of attack from Figure 3.8. According to these
43
0 50 100 150 200 250 300 350 4000.5
0
0.5
1
1.5
2
2.5
CTb for TSR = 2.5
(deg)
plain DMSTGormontBerg AM = 6
StricklandParaschivoiu
(a) TSR = 2.5
0 50 100 150 200 250 300 350 4001
0.5
0
0.5
1
1.5
2
2.5
CTb for TSR = 2
(deg)
(b) TSR = 2
0 50 100 150 200 250 300 350 4000.5
0
0.5
1
1.5
2
2.5
CTb for TSR = 3
(deg)
(c) TSR = 3
Figure 3.6: Blade torque coefficient for different dynamic stall models.
curves, the dynamic stall model delays the overall effective performance of the blade
by smoothening the sudden changes of the quasi-static approach. Specially the front
part of the turbine shows very well this inertia effect that tends to treat the state of
operation of the blade in a more conservative way.
44
30 20 10 0 10 20 301.5
1
0.5
0
0.5
1
1.5CL for TSR = 2
C L
plain DMSTGormontBerg AM = 6
StricklandParaschivoiu
(a) TSR = 2
20 15 10 5 0 5 10 151.5
1
0.5
0
0.5
1
1.5CL for TSR = 2.5
C L
(b) TSR = 2.5
15 10 5 0 5 101.2
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8CL for TSR = 3
C L
(c) TSR = 3
Figure 3.7: Blade lift coefficient for different dynamic stall models against
angle of attack.
When comparing the power between plain DMST, Figure 2.6 and Berg mod-
ification, Figure 3.9, one sees that differences in the back half performance are very
little. The front half, instead, a presents a noticeable improvement in performance for
TSR lower than 3 and a less detectable exacerbation of the power output for higher
45
0 50 100 150 200 250 300 350 40015
10
5
0
5
10
15
eff (deg) for TSR = 2.5
(deg)
plain DMSTBerg AM = 6
(a) TSR = 2.5
0 50 100 150 200 250 300 350 40015
10
5
0
5
10
15
eff (deg) for TSR = 2
(deg)
(b) TSR = 2
0 50 100 150 200 250 300 350 40015
10
5
0
5
10
eff (deg) for TSR = 3
(deg)
(c) TSR = 3
Figure 3.8: Effective angle of attack for plain DMST and Berg model.
values. On the whole, this means that most of the dynamic stall occurs in the front
half and that it tends to improve the overall performance of the turbine, because it
predicts that stall comes later than in a quasi-static evolution, but it disappears faster
than it appears. The lower power predicted for high values of TSR can be neglected
and will not be commented further, because when the turbine is working at this range
46
of TSR, dynamic stall looses dominance to give it to wake interactions [9].
1.5 2 2.5 3 3.5 4 4.5 50.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4
0.5CP against TSR
TSR
C P
CPCP,frontCP,back
Figure 3.9: CP against TSR with Berg dynamic stall model.
47
3.4.2 Stall study using DMST with Berg adaptation
Figure 3.10 is used, mainly, to detect the regions where the blade is working
under stall12 regime. See that for low tip-speed ratios, most of the stall occurs evenly
both in the rear and front halves of the turbine. Both parts, according to Figure 3.9
are extracting a similar amount of energy from the flow, which means that the inter-
ference factor of both halves is high enough. Therefore, the flow component of the
relative velocity of the blade is important enough so that both halves work at high
angles of attack for an extended period of time. However, as TSR grows, the front
half starts to extract all the energy from the flow, so it reaches the rear half with very
slow velocities, which produces a huge fall in the angle of attack. Hence, the blade in
the rear half does not reach stall regime.
The reference angle of attack has also been included in Figure 3.10 to give an
idea of the delay introduced by the constant motion of the blade.
12This section only works with Berg addition to DMST, so stall always refer todynamic stall, the proper type of stall of oscillating aerodynamic problems.
48
0 50 100 150 200 250 300 350 40025
20
15
10
5
0
5
10
15 (deg) for TSR = 2.5, Berg model
(deg)
eff
ref
(a) TSR = 2.5
0 50 100 150 200 250 300 350 40030
20
10
0
10
20
30 (deg) for TSR = 2, Berg model
(deg)
(b) TSR = 2
0 50 100 150 200 250 300 350 40015
10
5
0
5
10 (deg) for TSR = 3, Berg model
(deg)
(c) TSR = 3
Figure 3.10: Real and effective angle of attack for Berg model.
49
CHAPTER 4
WAKE INTERACTION
4.1 Concepts
Wake interaction is the effect of the turbulent wakes generated by the blades
on the front half received on the back half. However, BEMT is unable to model
turbulence, so wake interaction is neglected in streamtube models. Also, modeling this
effect by using the fundamental physics that describe turbulence or some turbulence
model and applying it directly to streamtube models would be very detrimental
to the computational efficiency of BEMT in fact, the problem would become a
mixture of BEMT and a grid-centered algorithm. BEMTs main advantage, actually,
is computational efficiency. Therefore, a workaround was needed. Kozak [9] studied
the turbine described on Table 2.1 with a grid-centered method. He used STAR-
CCM+ [23] to apply 2D finite volume discretization to the NavierStokes equations.
Kozak and Vallverdu et al. [10] compared the effective angle of attack obtained from
Vallverdus code [30] with dynamic stall the green curve in Figure 3.8 with Kozaks
own results shown on [9]. From this comparison, they were able to develop a much
simpler and effective wake interaction model for DMST that was shown to correlate
well with finite volume simulation.
50
4.2 Theory development
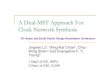
The Kozak et al. wake model follows the subsequent observation. By studying
graphic visualizations of the vorticity generated by the blades [9] see Figure 4.1 ,
they realized that the number of wakes,
Nw = 0.85Nb TSR , (4.1)
that exist in the rear half of the turbine at a given moment is proportional to the tip
speed ratio and the number of blades.
Figure 4.1: Visualization of the vorticity for TSR = 3 [9].
Also, they observed that each blade hits each wake twice. They considered
that the width of a wake is equal to the thickness of a blade. This hypothesis neglects
the wake diffusion, but it is accurate enough for streamtube application. Therefore,
a distance value,
dw = 2 tNw , (4.2)
can be obtained. This distance, dw, represents the sum of all the parts of the blade
path that crosses a wake. However, this value is more useful if used as a ratio,
rw =dwpi R
, (4.3)
where the denominator is the distance covered by a blade in the rear half-cycle of
the turbine. Note that rw does not depend anymore on the number of blades of
51
the turbine, because both numerator and denominator include the number of blades,
hence it disappears. It represents the proportion of the blade path in the back that
cuts through a wake.
Figure 4.2: Effective angle of attack comparison between Kozak and Val-
lverdu results for TSR = 3 [10].
Kozak and Vallverdu et al. assumed that the flow inside the wake travels at
the same speed and with the same direction than the blade that generated it. There-
fore, according to that assumption, when a blade hits a wake in the rear part, its
relative velocity is diminished a lot, and so does its instantaneous angle of attack. In
other words, when a blade hits a wake, its lift and drag coefficients decrease dramati-
cally. This hypothesis may seem to be very crude, because it neglects several diffusion
and transport effects. Also, the blade and the wake do not hit in parallel directions.
However, following this line of thought, Kozak and Vallverdu et al. multiplied Val-
lverdus results of the rear half-cycle effective angle of attack by the (1 rw) term they dropped lift and drag down to zero whenever a blade hits a wake. Afterwards,
they compared the output with Kozaks [9] effective angle of attack: the result was
very satisfactory. Both curves, in the range of [pi, 2pi] fit almost perfectly seeFigure 4.2 for the TSR = 3 example13. Hence, the hypothesis taken related to the
flow motion in the wake proves not to be so wrong.
The effective angle of attack, as said before, is basically a representation of
13Curves for other values of TSR can be found in [10].
52
the lift coefficient. Therefore, both Kozak and Vallverdu et al. [10] concluded that
the wake effect could be included in a simple way in streamtube model by reducing
both final lift and drag coefficients by rw,
CwakeL =
CdynL : (0, pi)
CdynL (1 rw) : (pi, 2pi), (4.4a)
CwakeD =
CdynL : (0, pi)
CdynL (1 rw) : (pi, 2pi). (4.4b)
This reduction should be applied after the determination of the interference factor
but before the postprocessing in other words, before the calculation of torque and
power coefficient.
Note that the wake interaction is approached as an average effect on the whole
rear half-cycle of the turbine. However, the real wake interaction is a very discrete
effect [9].
53
4.3 Algorithm modification
The wake model applied to DMST with dynamic stall would only change,
therefore, in the postprocessing part. See Figure 4.3.
Postprocess
TSR, (j), 1((j)), 2(
(j))
Compute ((j)), ur((j))
Compute ((j)), ((j)) as in Fig. 3.2 and C.1
Compute CdynL = SCdynL (|| , ), CdynD (|| , )
Compute CwakeL , CwakeD from Eq. 4.4
Compute CTb((j))
Compute CP 1, CP 2
Compute CP
using 2nd order
trapezoidal
integration
CP
Stop
Figure 4.3: Flowchart of the calculation of CP for the dynamic stall and
wake modification.
Wake interaction modification is included in Vallverdus code [30].
54
4.4 Results
4.4.1 Comparison between DMST with Berg modification and with/without
wake interaction model
The effective angle of attack obtained with the new wake interaction modifica-
tion applied to Berg DMST can be seen in Figure 4.4. It clearly shows that the model
that includes wake interaction presents a slightly reduced effective angle of attack re-
spectively to the non wake model, only in the back half of the turbine. Of course,
a real case would show reductions only at discrete regions, not a general decrement,
as explained in the last paragraph of Section 4.2. However, BEMT is treating the
problem as steady, so the average reduction is applied to the whole back half.
Figure 4.5 shows the power coefficient output for DMST modified with Berg
and wake interaction compared to only Berg. As can be seen, for low TSR the wake
interaction model predicts lower power output. However, it reports better perfor-
mance for high TSR. Low TSR have higher angles of attack: high CL CD.Therefore, both coefficients are reduced a similar amount and the resulting torque
gets diminished14. However, as TSR keeps increasing, the front half-cycle of the
turbine extracts more and more energy from the flow. Hence, the back half-cycle
gradually extracts less and less energy. As mentioned in Chapter 2, at some TSR
slightly over 3, the back half stops producing power. From this value and above, it
becomes drag dominant and it even gives energy back to the flow see how, in Fig-
ure 4.6, the torque is negative in the back half-cycle. Therefore, if effective angle of
attack is reduced, the drag force that dominates the rear half-cycle torque decreases.
Then, the absolute value of the torque decreases, too: less opposing torque means
less energy back to the flow, which means more energy extracted from the flow on the
whole. Also, according to Figure 4.5, note that the wake interaction effect increases
14High angles of attack registered at low tip speed ratios are those when CL CD, according to Figure B.1 on Appendix B
55
linearly with TSR, according to the theory.
0 50 100 150 200 250 300 350 40015
10
5
0
5
10
15
eff (deg) for TSR = 2.5
(deg)
Berg AM = 6Berg AM = 6 with wake
(a) TSR = 2.5
0 50 100 150 200 250 300 350 40015
10
5
0
5
10
15
eff (deg) for TSR = 2
(deg)
(b) TSR = 2
0 50 100 150 200 250 300 350 40015
10
5
0
5
10
eff (deg) for TSR = 3
(deg)
(c) TSR = 3
Figure 4.4: Effective angle of attack for DMST with Berg and wake modi-
fication.
Computationally, this wake interaction model is so simple that it virtually
does not change the code performance. Therefore, as it shows better agreement
56
1.5 2 2.5 3 3.5 4 4.5 50.2
0.1
0
0.1
0.2
0.3
0.4
0.5CP against TSR
TSR
C P
Berg AM = 6Berg AM = 6 with wake
Figure 4.5: CP against TSR with Berg dynamic stall and with/without wake
interaction models.
0 100 200 300 4001
0.5
0
0.5
1
1.5
2One blade torque coefficient
UpwindDownwind
Figure 4.6: Torque coefficient of one blade for TSR = 4 using Berg model.
with Kozaks results for the same turbine [9], it will be added permanently to the
calculation of the turbine performance. Note that the rule stated in Equation 4.1
might vary according to different solidity values, type of blade, number of blades or
57
other parameters. Therefore, further experiments or simulations should be performed
in order to determine if these dependencies exist and, in case they do, how they
behave.
On the whole, the final performance result can be seen in Figure 4.7. The
optimal TSR of this turbine, according to the proposed model DMST with Berg
modification for dynamic stall and Kozak and Vallverdu variation for wake interaction
is around 2.75. However, the curve shows that the performance is fairly acceptable
in the range TSR [2.3, 3.2], approximately.
1.5 2 2.5 3 3.5 4 4.5 50.3
0.2
0.1
0
0.1
0.2
0.3
0.4
0.5CP against TSR
TSR
C P
CPCP,frontCP,back
Figure 4.7: CP against TSR with Berg dynamic stall and wake interaction
models.
58
CHAPTER 5
CONCLUSION
5.1 Summary
Streamtube models have been implemented in MATLAB [14] in order to obtain
a simple and relatively computationally inexpensive method to predict vertical-axis
wind turbine performance. With this method, data about power, torque, angle of
attack and flow velocities can be calculated, amongst other variables, for different
parametric values of tip speed ratio, solidity, chord length, free stream velocity and
others. Also, performance for different airfoil blade profiles can be computed by using
different lift and drag characteristic curves.
Three basic streamtube models are available: single, multiple and double-
multiple. DMST has been chosen due to its higher computational efficiency relative
to precision over convergence behavior. Afterwards, a dynamic stall model has been
applied to include dynamic stall effects in the original model. The Berg adaptation
of the Gormont method has been chosen, again because it gives the best balance of
precision over convergence. Finally, a simplified wake interaction model developed by
Kozak has been added too.
The results obtained show physical consistency to reality to some extent, and
are very useful to obtain fast qualitative data about any VAWT. However, they are
not suitable for precise design or flow observation. Finite volume methods using
RANS, LES or DNS with NavierStokes equations are needed to obtain precise data.
Nonetheless, BEMT is useful. Thanks to its ease of use and fast convergence, it can
help detecting major problems on more complicated simulations. Likewise, it can
serve to provide initial data for problems with poorer convergence or to orient some
59
turbine design project at its initial to intermediate stages.
5.2 Further work
To improve the streamtube model and make it more competitive, some more
work should be done. First, the Beoddes-Leishman indicial method should be imple-
mented and tested. This would help to improve the dynamic-stall prediction. Further
investigation should be done to improve and generalize the already applied wake in-
teraction method. A discretization of streamtubes in the z direction, such as the
one proposed in [18], might be applied to include 3D effects of the flow, such as the
boundary layer that the ground induces to the wind. Also a tower interaction modifi-
cation might be included. Finally, some corrections to the model could be performed
to consider the spanwise components of the velocity. However, some convergence
evaluation should be performed to state if the method is still fast enough so these
modifications are worth applying.
More comparisons with real cases or other simulations should be done, for
different input parameters and turbines. This would help validating or limiting to
a certain range of some parameter the code.
Finally, one could also include design optimization procedures to find better
work regimes of the turbine. Some of them include finding the optimum variable
blade pitch, free stream velocity or varia
Recommended