A. Reichold, JAI @ Oxford for the LiCAS collaboration
1DESY, Sep. 27, 2005
WarsawUniversity
LiCAS
Linear Collider Alignment & Survey
Survey and Alignment of the ILC
Alignment Errors

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
2
Overview The ILC survey and alignment process RTRS measurement principle for the reference survey Simulations of the survey process
Reference survey SIMULGEO models for short distance (<100m) Random walk models for long distance
Stake Out and alignment Interface to Placet
Systematic errors in the reference survey Error Reduction
How accurate can position alignment really be Cryo-module improvements
fiducialisation build tolerances
Survey and Alignment of non-Linac components Sources, DR, turnaround, BC, BDS, IP, spectrometer, polarimeter,
dumps

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
3
The ILC survey and alignment process
(in the tunnel)
1. Reference survey (the hard part):stat<200m/600m
rapidly establish co-ordinates of regular array of reference markers along entire tunnel wall
rapid = much faster then drift of tunnel rapid = as fast as possible since time = money hard = keep accuracy over large distance new instrument = RTRS (Rapid Tunnel Reference Surveyor) instrument developed by LiCAS group
2. Stake out: <50m any point
Relate external accelerator component’s markers to reference markers measurement distance = across the tunnel diameter manually operated classical instruments could work but should be
incorporated into RTRS if possible (speed, automation)3. Alignment: <100m any
point adjust position of accelerator element to get closer to nominal no automated process for cryo-modules exist yet manual action with a large wrench needed so far least accurate of steps so far

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
4
4. Fiducialisation (under development):≥300m Relate external markers to relevant active centre line of accelerator
element If necessary define an average active centre line if many elements
determine the centre line as done in cryo-module Center line may dynamically change during cool down and
transport. This is the biggest contribution to the fiducialisation error.5. Build tolerances:
Internal to an accelerator element there could be static variation of several active elements around the centre line (scatter
of cavities in cryo-module) adjusted to =100m dynamic changes of elements with load, current, trim, external
temperature, etc. =???m
Externally there could be variations in target marker position when placing the markers repeatedly
into their nests (dirt, dust, wear) ≤1m marker centring errors (markers are usually sphere mounted to allow for
large acceptance angles by repointing. If target not correctly centred in sphere you get an error) 0.5m
The ILC survey and alignment process
(outside the tunnel)

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
5
Notes about the process Notation:
offset = one instance of statistical quantity called error error = sigma of the offset distribution
Some offsets correlate within groups of accelerator elements all elements in a cryo-module share the same offset due to stake out
and alignment 100% correlation External build tolerances also apply identically to all elements in a
module but they are usually negligible The fraction of the fiducialisation error due to cool-down distortions is
not the same for all elements but is systematically distributed to the elements some correlation function dependent on module mechanics
Offsets from reference survey are strongly correlated over very long distances. I.e. better then 200 m over 600m (see simulaions)
All other offset sources are uncorrelated over distances > 1 cryo-module length

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
6
collider component
RTRS concept
Tunnel Wall
Reconstructed tunnel shapes(relative co-ordinates)
wall markers internal FSI external FSISM beam
LiCAS technologyfor automated stake-out process

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
7
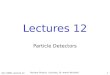
LiCAS Measurement Principle
External FSI System measures
Wall marker location
Internal FSI System z. &
x,y & ,between
cars
Straightness Monitor x,y & ,between
cars

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
8
Build opto-geometric model of all measurements in a 6-car train and all reference wall markers using SIMULGEO
Add up to 20 trains in advancing locations into the model model consists of 20 trains measuring 26 wall markers. total of O(10.000) elements and measurements with individual
errors in the model Most wall markers get measured 6 times in overlapping
measurements this is how trains correlate with each other Perform error propagation:
from: position errors of elements in the cars and measurement errors
to : errors of wall markers, i.e. invert error matrix of rank N2 = 10.0002
Limit of this procedure is memory of computer 20 trains need close to 1 GByte and 34h on 2GHz CPU
Reference Survey Simulations(short distance < 100m)

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
9
Simulgeo Model of RTRSonly first and last car of
6-car train shown
retroreflector
Laser beam parallelto Gravity @ car 1
2nd CCD faking clinometer
1st CCD faking clinometer
Laser beam parallelto Gravity @ car 6
internal FSI lines
wall marker
straightnessmonitor laserbeamintermediate
cars not shown
LSM-CCDs for incoming beam
LSM-CCDs for return beam

10
Reference Survey Simulations(long distance >100m)

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
11

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
12

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
13
Stake out and Alignment Simulations
Both processes so far only add a Gaussian random offset to the reference survey
Width of these Gaussians is so far based on separate instrument errors and error propagation by surveyors. Assumptions: horiz=0.3mgon, vert=0.3mgon,
dist=0.1mm, DL between reference markers = 5m, Note: 1gon = 2p/100, 1mgon = 63rad
In future we will fully simulate an integrated stake out with SIMULGEO and determine the errors to see if we can decrease them.

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
14
Interface to Placet(licas_sim)
Fortran program tested on Linux licas_sim produces the offsets of components given
their z positions All internal tuning parameters (measurement
resolutions) are in a control card file and can be modified by users
Input: two flat text files (one for each arm of the machine) with one z position per line, representing the nominal z of the component to be aligned.
Output: each line of input replaced with: z-original, x-offset, y-offset, z-offset
All units are meters

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
15
Systematic errors in reference survey
We have no measure of them yet Hard to measure because LiCAS “would” be the highest
accuracy instrument Mainly to be determined via consistency checks during
LiCAS test runs at DESY next year Potential sources of systematics exists in:
miscalibration of components (predominant source) scale-mismatch between sub-systems drift errors on precision components systematic atmospheric effects
Most of them would be addressed by calibration procedures
Which systematic errors would be dangerous for LET?

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
16
Error Reduction Position Alignment:
Today’s movers for cryo-modules manual coarse movers (lots of force needed) few cm range hardened steel feet on hardened steel plate
If the estimated 100 m accuracy prove to be insufficient and money is available one can:
Mount modules using bearings motorise adjusters achieve O(10 microns)

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
17
Error Reduction Cryo-module fiducialisation
300 microns is limit with current module design better is possible but at great cost part of 300 microns is currently uncertainty
rather then error. I.e. expected scatter of beam line positions in a large number of modules. if you measure each one of them internally (wire system) you can get better
transport and handling is a large unknown factor

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
18
Error Reduction
Cryo-Module build tolerances scatter of cavities in a string = 100 m <
fiducialisation error no need to improve offset of quads from beam line = 100 m This is currently not the leading error

DESY, Sep. 27, 2005
A. Reichold, JAI @ Oxford for the LiCAS collaboration
19
Survey and Alignment of non-Linac components
We know neither specs nor methods yet We are working on a document to
collect these Would be very useful to prioritise the
list by knowing which part is most sensitive
Input from WG1 of highest importance
Recommended