Research ArticleConsensus Problem for Linear Time-InvariantSystems with Time-Delay
V Fragoso-Rubio 1 M Velasco-Villa 1 M A Vallejo-Alarcoacuten 1
J A Vaacutesquez-Santacruz 2 andM A Hernaacutendez-Peacuterez3
1Departamento de Ingenierıa Electrica Seccion de Mecatronica CINVESTAV-IPN Av IPN No 2508Col San Pedro Zacatenco 07300 Ciudad de Mexico Mexico2Universidad Veracruzana Facultad de Ingenierıa Juan Pablo II sn Boca del Rıo Veracruz Mexico3Universidad Veracruzana Instituto de Ingenierıa Juan Pablo II sn Boca del Rıo Veracruz Mexico
Correspondence should be addressed to M Velasco-Villa velascocinvestavmx
Received 19 March 2019 Revised 11 June 2019 Accepted 20 June 2019 Published 7 July 2019
Academic Editor Francesco Conte
Copyright copy 2019 V Fragoso-Rubio et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
This work deals with the consensus problem of networks of agents with linear time-invariant dynamics and input time-delay Apredictor-observer scheme that estimates the future value of the system state is considered The partitioned nature of the predictorallows dealing with larger time-delays than those reported in the literature The estimated future state of the system is later used inthe consensus protocol with the aim of compensating the system input delay The effectiveness of the solution is shown by meansof numerical evaluations
1 Introduction
Interest in multiagent systems is due to the multiple possibleapplications of this kind of systems such as the formationproblem of Unmanned Aerial Vehicles (UAV) groups ofsatellites formation control vehicles distributed sensorsautomatic vehicular control and communication networksfor instance see [1ndash3] Consensus problem is referred toas the control and coordination of a set of agents within acommunication topology In the study of consensus problemfor multiagent systems factors as communication topologytime-delays and dynamic model become relevant [4ndash7] Theimportance of the Laplacian of the network in the solutionof the consensus problem has been studied in [1 2 8]The consensus problem becomes a more challenging taskwhen the communication topology among agents presentstime-delays Several solutions have been reported consid-ering different system conditions as fixed time-delay andtopologies [9] multiple time-delay cases [10 11] systemswith topologies that change over time [12] and also systemswithin a discrete-time context [10] Consensus problem forsystems with single integrator dynamics has been widely
studied [4 5 13] solutions for agents with double integratordynamics are presented in works such as [9 13] High-orderlinear systems have been dealt with in [7] where consensusproblem is converted in the simultaneous stabilization ofmultiple subsystems and sufficient conditions for consensusand consensualization independent of the number of agentsin the systems are presented this work is extended in [14] byconsidering variable time-delays Linear time-invariant (LTI)systems with variable topologies andmultiple time-delays areconsidered in [15] and necessary and sufficient conditionsfor consensus are given A PD-like consensus scheme thattransforms a system with constant or variable delays into aneutral type system is presented in [16] Prediction-basedschemes have been proposed for systems without time-delaysto estimate the current state of the agents when only relativemeasurements are available For systems with time-delay theconsensus problem of single integrator agents with input andoutput time-delay is studied in [17] where a state predictoris used to compensate the time-delay while consensus-basedformation of agents with double integrator dynamics [18] andheterogeneous systems composed of agents with single anddouble integrators [19] are studied and the input time-delay
HindawiMathematical Problems in EngineeringVolume 2019 Article ID 1607474 12 pageshttpsdoiorg10115520191607474
2 Mathematical Problems in Engineering
is compensated by means of a state predictor The consensusproblem of high-order multiagent systems with input andoutput communication delays is solved in [20] by means ofa truncated predictor-based schemeThe truncated predictorapproach is extended in [21] to compensate the input time-delay of nonlinear systems in order to achieve consensuswhile a nonlinear adaptive observer estimates the states ofthe agents that are used in the adaptive control scheme thatis proposed in [22] to achieve leader-following consensus foruncertain nonlinear multiagent systems
The control problem of systems with time-delays hasalso been of the interest of the scientific community Toovercome this difficulty many solutions have been presentedA first approach was the Smith Predictor [23] composed by acontrol designed without considering the system time-delayand a prediction of the output that compensates the delaySeveral modifications of the scheme were later presentedto overcome its shortcomings and to expand the types ofsystems where it is applicable see [24 25] being some of theseworks The assignment of a finite spectrum of the closed-loop system (Finite Spectrum Assignment) is the goal of theapproach presented in [26] The reduction strategy in [27]is motivated by a similar idea However in these solutionsthe dimension of the feedback law is infinite which impliesthat the implementation of this method must be realizedby means of a numerical approximation Safe numericalimplementations are presented in [28 29]
The prediction approach took a step further in [30] wherethe state prediction is attained for linear systems with bothinput and state delays Nonetheless these chained observersare composed by distributed terms in which implementationrequires a numerical approximation It is in the work ofNajafi et al [31] where a group of chained predictors withfinite spectrum is proposed to compensate the input delay oflinear MIMO systems The approach assumes that the wholesystem state can be measured and guarantees asymptoticstability of the closed-loop system and prediction errorThe stability proof of the closed-loop system results in amethod to calculate the gain matrices of the predictor andthe control bymeans of LinearMatrix Inequalities (LMI)Thework is extended in [32] where robust 119867infin control is usedto minimize the input disturbance effect on the predictionerror for linear systems with input time-delay The idea ofa sequence of predictors has been applied to linear systemswith time-varying input [33] and time-varying output [34]time-delays and to time-varying systems with time-varyingdelays [35] In [36] the state of a nonlinear system withdelayed output is reconstructed by means of a chained setof observers The main advantage of the chained predictorsresides on their ability to deal with larger time-delays
Based on the idea of the nested predictor [31 34] thepresent paper deals with the consensus problem of LTIsystems with constant time-delay by proposing a modifi-cation of the predictor-observer scheme presented in [37]that estimates the state of the system forecasted 120591 units oftime into the future The predictor assumes that only a partof the state space can be measured and the definition ofthe subpredictor errors allows proving that its convergenceimplies the convergence of the predicted state to the future
system state The estimated future state is later on used bythe consensus algorithm to compensate the input delay ofthe system It is important to note that since there is a time-delay in the input of the systems by using the forecastedestimated state the closed-loop system will be in terms ofthe current state which results in the compensation of theinput time-delay The consensus protocol presented here isan adaptation of the one proposed in [7] for LTI systemsand initially adapted for the input delay case in [38] Themodification to the protocol that we propose consists of usingthe predicted future state instead of the current and delayedstates which allows systems with larger delays to achieveconsensus as it will be shown in the numerical evaluations
The work is organized as follows in Section 2 a briefrevision of the graph theory and the properties of the Lapla-cian matrix is presented Section 3 presents the statement ofthe problem and then the predictor-observer scheme thatallows estimating the future state of the system is developedin Section 4 The consensus algorithm is given in Section 5and the results of the numerical evaluations can be found inSection 6The work ends with some conclusions in Section 7
2 Graph Theory and Laplacian Matrix
Graph theory is the mathematical tool used to modelthe information exchange among agents [39] This sectionpresents some basic concepts of graph theory and propertiesof the Laplacian matrix that are of the interest of this work
Let G = NE be an ordered graph where N is thenonempty node set N = 1 119899 and E sub N timesN is theedge set An edge inG is given by 119890119894119895 = (119894 119895)
A directed graph is a pair (NE) where the edge 119890119894119895 isin Eindicates that agent 119895 can obtain information from agent 119894 butnot necessarily in the other way The edge (119894 119895) has a node 119894that is called the parent node and a node 119895 called child nodeA directed path is an edge sequence in a directed graph ofthe form (1198941 1198942) (1198942 1198943) A directed tree is a directed pathwith every node having exactly one parent except for a nodecalled root node that has no parent node and has directedpaths to every other node A subgraph (119881119904E119904) of (119881E) issuch that119881119904 sub 119881 andE119904 sub Ecap(119881119904 times119881119904) A directed spanningtree (119881119904E119904) of the directed graph (119881E) is a subgraph with adirected path where 119881119904 = 119881
The adjacencymatrix119860 = [119886119894119895] isin R119899times119899 of a directed graphwith the set nodeN = 1 119899 is such that the weight 119886119894119895 ispositive if (119894 119895) isin E and 119886119894119895 = 0 if (119894 119895) notin E When weightsare not relevant 119886119894119895 = 1 if (119894 119895) isin E
21 LaplacianMatrix TheLaplacianmatrixL = [119897119894119895] isin R119899times119899of a directed graph is given by 119897119894119894 = sum119899119895=1119895 =119894 119886119894119895 and 119897119894119895 = minus119886119894119895for every 119894 = 119895 Some remarkable properties of this matrix areconsidered
(i) 119897119894119895 le 0 119894 = 119895(ii) The sum of the elements of every row equals zerosum119899119895=1 119897119894119895 = 0 119894 = 1 119899(iii) For directed and undirected graphs 1205821198711 = 0 is an
eigenvalue of L due to the fact that the sum of all
Mathematical Problems in Engineering 3
the elements of a row equals zero There also existsan eigenvector 1119899 = [1 1]119879 with 119899times1 dimensionscorresponding to the zero eigenvalue
(iv) All of the eigenvalues 120582119871119894 of L different from zeroare positive (for directed graphs) or have positive realparts (for undirected graphs) Therefore the real partof every eigenvalue of minusL is negative
3 Problem Statement
Thiswork deals with the consensus problem for a set of agentswith input time-delayThe dynamics of the agents is modeledas linear time-invariant systems with input time-delay andfixed communication topology The graph that models thecommunication is considered to be either directed with aspanning tree or undirected and connected which impliesthat one of the eigenvalues of the Laplacianmatrix equals zero[40]
Each agent is considered to be a 119901-dimensional Multiple-Input-Multiple-Output (MIMO) linear system with the sameinput time-delay and dynamics given by
119894 (119905) = 119860 119894119909119894 (119905) + 119861119894119906119894 (119905 minus 120591119894)119910119894 (119905) = 119862119894119909119894 (119905) (1)
for 119894 = 1 2 119899 where 119909119894 = [1199091198941 119909119894119901]119879 isin R119901 representsthe state of the 119894-th agent 119906119894 isin R119902 is the input control 120591119894 gt 0is a known constant input time-delay 119910119894 isin R119903 is the outputsignal and 119860 119894 isin R119901times119901 119861119894 isin R119901times119902 and 119862119894 isin R119903times119901 It isimportant to note that every parameter is associated with the119894-th agent
Consensus Problem A system of 119899 agents is said to achieveconsensus if for any initial condition 119909119894(0) 119909119894(119905) 997888rarr 119909119895(119905) as119905 997888rarr infin for all 119894 119895 = 1 119899 [1]
To solve the consensus problem for multiagent systems aprotocol is presented in [7] for agents without communica-tion delay with dynamics given by
119894 (119905) = 119860 119894119909119894 (119905) + 119861119894119906119894 (119905) (2)
The consensus protocol is given by
119906119894 (119905) = 1198701119909119894 (119905) + 1198702Σ119899119895=1119886119894119895 (119909119895 (119905) minus 119909119894 (119905)) (3)
for 119894 119895 = 1 119899 where 119886119894119895 are the elements of the adjacentmatrix and1198701 and1198702 are constant gainmatricesThe authorspresent necessary and sufficient conditions for consensus andconsensualization
4 Predictor-Observer Scheme
To compensate the time-delay present in the dynamics ofthe agents a predictor-observer scheme is proposed Theobjective is to estimate the future state of the agents 120591119894 unitsof time ahead to later design a consensus scheme basedon the predicted state It is important to note that the use
of predicted future states on time-delayed systems avoidsthe numerical implementation problems present in solutionswith infinite spectrum even more the partitioned nature ofthe scheme proposed by this work allows compensating largetime-delaysThe design of the predictionndashobserver scheme isdone under the following assumptions
Assumption 1 Signals 119910(119905) and 119906(119905) are available formeasure-ment
Assumption 2 For system (1) the pair (119860 119894 119861119894) is controllableand (119860 119894 119862119894) is observableAssumption 3 Consider that for the time delay 120591119894 in (2) thereexists an integer119898119894 gt 0 such that 120591119894 = 120591119894119898119894Remark 4 Notice that Assumption 3 is just a technicalrequirement in order to avoid the consideration of irrationalvalues for the timendashdelay 120591119894 that could yield an approximateprediction
For the 119894-th agent a set of advanced variables can bedefined as
1199081198941 (119905) = 119909119894 (119905 + 120591119894)1199081198942 (119905) = 1199081198941 (119905 + 120591119894) = 119909119894 (119905 + 2120591119894)
119908119894119898 (119905) = 119908119894119898minus1 (119905 + 120591119894) = 119909119894 (119905 + 119898120591119894) = 119909119894 (119905 + 120591119894)
(4)
where 119908119894119891 = [1199081198941119891 1199081198942119891 119908119894119901119891]119879 for 119891 = 1 119898 refers tothe 119901-dimensional vector state Taking the time derivative of(4) it is obtained that
119894119891 = 119860 119894119908119894119891 + 119861119894119906 (119905 minus (119898 minus 119891) 120591119894) (5)
for 119891 = 1 119898 In particular for 119891 = 119898119894119898 = 119860 119894119908119894119898 + 119861119894119906 (119905) (6)
and a free-delay dynamic is obtainedNotice that system (6) represents the evolution of system
(1) forecasted 120591119894 units of time without input-delayFor system (6) the following predictor-observer is pro-
posed
119908119894119891 = 119860 119894119908119894119891 + 119861119894119906119894 (119905 minus (119898 minus 119891) 120591119894) + 119871 119894119862119894119890119908119894119891 (119905 minus 120591119894) (7)
for 119891 = 1 119898 where 119871 119894 isin R119901times119903 is a gain matrix and theerror signal
119890119908119894119891 (119905) = [1198901199081198941119891 (119905) 119890119908119894119901119891 (119905)]119879 (8)
takes the form
1198901199081198941 (119905) = 119909119894 (119905 + 120591119894) minus 1199081198941 (119905) 119890119908119894119891 (119905) = 119908119894119891minus1 (119905 + 120591119894) minus 119908119894119891 (119905) for 119891 = 2 3 119898 (9)
4 Mathematical Problems in Engineering
The error dynamics (9) is given by
1198901199081198941 (119905) = 119894 (119905 + 120591119894) minus 1199081198941 (119905) 119890119908119894119891 (119905) = 119908119894119891minus1 (119905 + 120591119894) minus 119908119894119891 (119905)
for 119891 = 2 3 119898(10)
resulting in
1198901199081198941 (119905) = 119860 1198941198901199081198941 (119905) minus 119871 1198941198621198941198901199081198941 (119905 minus 120591119894) 119890119908119894119891 (119905) = 119860 119894119890119908119894119891 (119905) + 119871 119894119862119894119890119908119894119891minus1 (119905)
minus 119871 119894119862119894119890119908119894119891 (119905 minus 120591119894) (11)
with 119891 = 2 3 119898 The vectorial form of (11) is the time-delay error system given by
119890119908119894 (119905) = 119860lowast0119890119908119894 (119905) + 119860lowast1119890119908119894 (119905 minus 120591119894) (12)
with 119890119908119894 = [1198901199081198941 119890119908119894119898]119879 for 119894 = 1 119899 and
119860lowast0 =[[[[[[[
119860 119894 0 sdot sdot sdot 0 0119871 119894119862119894 119860 119894 sdot sdot sdot 0 0 d
0 0 sdot sdot sdot 119871 119894119862119894 119860 119894
]]]]]]]
119860lowast1 = [[[[[
minus119871 119894119862119894 sdot sdot sdot 0 d
0 sdot sdot sdot minus119871 119894119862119894
]]]]]
(13)
where 0 isin R119901times119901 is a matrix with all inputs equal to zero
41 Related Predictor Scheme The predictor given by (7) isequivalent to the sequential subpredictors strategy proposedby [31] that is recalled in the following
Consider system (1) and assume that all the state 119909(119905) isavailable for measurement this is 119862119894 = 119868
(119905) = 119860119909 (119905) + 119861119906 (119905 minus 120591) (14)
and there exists119898 isinZ+ such that
120591 = 120591119898 (15)
which allows proposing the sequence of subpredictors givenby
1 (119905) = 1198601199091 (119905) + 1198711 (1199091 (119905 minus 120591) minus 1199092 (119905)) + 119861119906 (119905)
119894 (119905) = 119860119909119894 (119905) + 119871 119894 (119909119894 (119905 minus 120591) minus 119909119894+1 (119905))+ 119861119906 (119905 minus (119894 minus 1) 120591)
119898 (119905) = 119860119909119898 (119905) + 119871119898 (119909119898 (119905 minus 120591) minus 119909119898+1 (119905))+ 119861119906 (119905 minus (119898 minus 1) 120591)
(16)
with 119909119894 isin R119899 119894 = 1 119898 The prediction errors for eachsubpredictor are defined as
119890119894 (119905) = 119909119894 (119905 minus (119898 minus 119894 minus 1) 120591) minus 119909119894+1 (119905 minus (119898 minus 1) 120591)119890119898 (119905) = 119909119898 (119905 minus 120591) minus 119909 (119905) (17)
for 119894 = 1 119898 minus 1 and the error dynamics given by
119890119894 (119905) = 119860119890119894 (119905) + 119871 119894119890119894 (119905 minus 120591) minus 119871 119894+1119890119894+1 (119905 minus 120591)119890119898 (119905) = 119860119890119898 (119905) + 119871119898119890119898 (119905 minus 120591) (18)
for 119894 = 1 119898 minus 1 Asymptotic convergence for the errordynamics is guaranteed by means of an LMI method thatconsiders the closed-loop system that allows calculating thesubpredictors and controlling gain matrices
Themain difference between both schemes is that authorsin [31] consider systems where it is possible to read the wholestate and the predictor-observer (7) presented here includesthe cases when only a partial measurement is available Therelation between both schemes can be found considering thefollowing coordinate change
1199081 (119905) = 119909119898 (119905)
119908119898 (119905) = 1199091 (119905) (19)
and for the error signals
119890119908119894 (119905) = minus119890119898+1minus119894 (119905 + (119898 + 1 minus 119894) 120591) (20)
for 119894 = 1 119898 to subpredictors (16) and prediction errors(17) and assuming 119862 = 119868 in system (1) results in the chain ofpredictors (7) and error signals (12)
Remark 5 It is important to note that the predictor (16)cannot be used to estimate the future state of system (1) when119862119894 = 11986842 Convergence Analysis of the Predictor-Observer Theconvergence to zero of the injection errors (9) is assured byshowing the stability of the error dynamics (12)
Mathematical Problems in Engineering 5
Lemma 6 Let the predictor-observer (7) satisfy Assumptions1 2 and 3 Suppose that there exist positive gain matrices 119871 119894 for119894 = 1 2 119899 such that the matrix (119860 119894minus119871 119894119862119894) is Hurwitz thenthere exists a sufficiently large119898119894 such that the error signals (9)exponentially converge to zero
Proof The characteristic equation of (12) is given by
119901 (119904) = det (119904119868119898119901 minus 119860lowast0 minus 119860lowast1119890minus119904120591119894) = 0 (21)
It is possible to show that (21) can be rewritten as
119901 (119904) = 119898prod119891=1
(119868119899119904 minus 119860 119894 + 119871 119894119862119894119890minus119904120591119894) = 0 (22)
It is clear that every factor of (22) represents the Laplacetransform of a system of the form
119890119908119894119891 (119905) = 119860 119894119890119908119894119891 (119905) minus 119871 119894119862119894119890119908119894119891 (119905 minus 120591119894) (23)
Since the parameters of 119871 119894 are free from the observabilityassumption of the pair (119860 119894 119862119894) it is always possible to locatethe eigenvalues of the matrix 119860 119894 minus 119871 119894119862119894 in the left halfcomplex plane The Hurwitz property of matrix 119860 119894 minus 119871 119894119862119894assures the stability of the differential difference equation(23) for a sufficiently small time delay 120591119894 [41] The maximumtime delay 120591lowast119894 for which system (23) will be asymptoticallystable depends on the choice of the observer gain 119871 119894 and itscomputation is not an easy task since its complexity rises asthe dimension of the system increases Thus given a gain119871 119894 such that 119860 119894 minus 119871 119894119862119894 is a Hurwitz matrix it is alwayspossible to asymptotically stabilize the prediction error (23)for a constant time delay 120591119894 lt 120591lowast119894 This fact can be verifiedfor instance by considering [42] or by reviewing the poleassignment procedure given in [41] Based on the abovearguments it will be assumed without loss of generality thatthere exist 119871 119894 and 120591lowast119894 such that system (23) is asymptoticallystable for 0 le 120591119894 lt 120591lowast119894 It should also be noticed that thestability of (23) is not only asymptotic but also exponential[43] Furthermore if matrix 119871 119894 is chosen according to the rulegiven inTheorem 31 in [34] this is
119871 = 119890119860119900120591lowast (24)
with
119860119900 = 119860 minus 119871119862 (25)
where 119871 is such that all the real parts of the eigenvalues of 119860119900are smaller than some negative real constant 120572 it is possibleto guarantee the exponential convergence of the predictionerrors 119890119908119894119891(119905) to zero which results in the convergence of theestimated future state 119908119894119898(119905) to the real future value 119909(119905 + 120591119894)Remark 7 It should be pointed out that a predictor of theform (23) with 119898 = 1 designed for a system with timedelay at the output was considered in [25] also for the case119898 = 1 in [44] a predictor for a nonlinear input delay systemis designed As mentioned before the partitioned predictorpresented in [31] is similar to the one presented in this sectionconsidering 119862 = 119868
Remark 8 Notice that in the case of 120591119894 = 0 the errordynamics (23) takes the form
119890119908119894119891 (119905) = (119860 119894 minus 119871 119894119862119894) 119890119908119894119891 (119905) (26)
where the stability is determined by the eigenvalues of thematrix 119860 119894 minus 119871 119894119862119894 that by the observability assumption canalways be stabilizable
Remark 9 It should be noticed that 120591119894 is given by 120591119894 =119898120591119894 therefore the larger number of subdelays considered byscheme (7) is the larger delay 120591119894 can be compensated withthe drawback of an increasing dimension of the proposedpredictor-observer
The following result allows obtaining the estimated values119909119894(119905 + 119891120591119894) from the future real values 119909119894(119905 + 119891120591119894) in (4)
Lemma 10 Suppose for system (1) that Assumptions 1 2 and3 are satisfied For every 120591119894 gt 0 there always exists a predictor-observer (7) such that the estimated states 119908119894119891(119905) exponentiallyconverge to the future values 119909119894(119905 + 119891120591119894) for 119891 = 1 119898Proof From the definition of error (9) it is possible to showthat
119908119894119891 (119905) = 119909 (119905 + 119891120591119894) minus119891sum119896=1
119890119908119894119896 (119905 + (119891 minus 119896) 120591119894) (27)
for 119896 = 1 119891 Then by Lemma 6 it is possible to concludethat the estimated states 119908119894119891(119905) exponentially converge to thecorresponding real values
Remark 11 Note that if119898 997888rarr infin then 120591119894 997888rarr 0 relaxing theconvergence conditions of the estimation error This impliesthat it is always possible to stabilize system (12) choosing theinteger119898 large enough
5 Consensus Problem
In this section the consensus protocol for LTI systemsin time-delay is presented The set of agents has a fixedcommunication topology that contains a directed spanningtreeThe dynamics of each agent is given by (1)This protocolconsiders the solution presented in [7] that is adapted to beused with the future state values estimated in the previoussection By using the predicted states instead of the currentone it is possible to deal with systems with large time-delays
Consider a set of 119899 agents of the form (1) where for thesake of easy of presentation it is assumed that 120591119894 = 120591 for 119894 =1 119899 that is
119894 (119905) = 119860119909119894 (119905) + 119861119906119894 (119905 minus 120591) (28)
The vectorial form of the complete set of agents is givenby
(119905) = (119868119899 otimes 119860) 119909 (119905) + (119868119899 otimes 119861) 119906 (119905 minus 120591) (29)
where 119909 = [1199091 1199092 119909119899]119879 119906 = [1199061 1199062 119906119899]119879 and 119868119899 isinR119899times119899
6 Mathematical Problems in Engineering
The following control scheme based on the predictor-observer (7) is proposed
119906119894 (119905) = 1198701119908119894119898 (119905) + 1198702 119899sum119895=1
119897119894119895 (119908119895119898 (119905) minus 119908119894119898 (119905)) (30)
for 119894 119895 = 1 2 119899 1198701 1198702 isin R119902times119901 where 119897119894119895 are theentries of the Laplacian matrix of the graph The controlscheme (30) can be rewritten as
119906 (119905) = (119868119899 otimes 1198701 minusL otimes 1198702) 119908119898 (119905) (31)
whereL isin R119899times119899 is the Laplacian of the system and119908119898 =[1199081119898 119908119899119898]119879 is the predicted stateThe closed-loop system (29)ndash(31) is given by
(119905) = (119868119899 otimes 119860) 119909 (119905)+ (119868119899 otimes 119861) (119868119899 otimes 1198701 minusL otimes 1198702) 119908119898 (119905 minus 120591) (32)
Considering that (119860otimes119861)(119862otimes119863) = 119860119862otimes119861119863 it is obtainedthat
(119905) = (119868119899 otimes 119860) 119909 (119905)+ (119868119899 otimes 1198611198701 minusL otimes 1198611198702) 119908119898 (119905 minus 120591) (33)
Recalling the observation errors
1198901199081 (119905) = 119909 (119905 + 120591) minus 1199081 (119905) 119890119908119891 (119905) = 119908119891minus1 (119905 + 120591) minus 119908119891 (119905) for 119891 = 2 3 119898 (34)
the estimated state119908119898(119905minus120591) can be rewritten as a function ofthe real state and the observation errors
119908119898 (119905 minus 120591) = 119909 (119905) minus 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (35)
where 119890119908119891 = [1198901199081119891 119890119908119899119891]119879 producing (119905) = 119867119909 (119905)
+ (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (36)
where119867 = (119868119899 otimes (119860 + 1198611198701) minusL otimes 1198611198702)Consider now a nonsingular matrix 119880 isin R119899times119899 such that
119880minus1L119880 = 119869L (37)
for 119869L isin R119899times119899 representing the Jordan canonical form of theLaplacian matrixL
Considering now the globally invertible change of vari-able
119909 = (119880minus1 otimes 119868119902) 119909 119909 = (119880 otimes 119868119902) 119909 (38)
for 119909 = [1199091 1199092 119909119899]119879 then it is possible to show that
(119880 otimes 119868119902) (119905)= [119868119899 otimes (119860 + 1198611198701)] (119880 otimes 119868119902) 119909 (119905)minus (L otimes 1198611198702) (119880 otimes 119868119902) 119909 (119905)+ [L otimes 1198611198702 minus 119868119899 otimes 1198611198701] 119898sum
119891=1
119890119908119891 (119905 minus 119891120591)(39)
from where
(119905)= [119868119899 otimes (119860 + 1198611198701) minus 119869119871 otimes 1198611198702] 119909 (119905)+ [119880minus1L otimes 1198611198702 minus 119880minus1 otimes 1198611198701] 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (40)
Equation (40) can be rewritten as
(119905) = Γ119909 (119905) + Δ 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (41)
where
Δ = 119880minus1L otimes 1198611198702 minus 119880minus1 otimes 1198611198701 (42)
Γ =[[[[[[[[[[
119860 + 1198611198701 0 0 sdot sdot sdot 00 1205742 1205751198611198702 sdot sdot sdot 0 d d
0 0 sdot sdot sdot 120574119899minus1 12057511986111987020 0 sdot sdot sdot 0 120574119899
]]]]]]]]]]
(43)
with 120574119894 = 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 119899 and 120575 = 0 or120575 = 1 depending on the structure of 119869119871Remark 12 Notice that since 119867 and Γ are similar matricesthey have the same eigenvalues Furthermore in (43) it can beseen that those eigenvalues correspond to the ones of119860+1198611198701and 119860 + 1198611198701 minus 1205821198941198611198702 for 119894 = 2 3 11989951 Consensus Analysis
Lemma 13 Consider a set of 119899 agents of the form (28)with a communication topology with a directed spanning treeUnder these circumstances solution to the consensus problemis achieved if and only if the matrices 119860 + 1198611198701 minus 1205821198711198941198611198702 for119894 = 2 3 119899 are HurwitzProof Let the invertible matrix 119875 = [1199011 1199012 119901119899119901] isinC119899119901times119899119901 be such that
119875minus1119867119875 = 119869119867 (44)
Mathematical Problems in Engineering 7
with 119869119867 being the Jordan canonical formof119867 defined in (36)Considering the change of coordinates
119909 = 119875minus1119909 119909 = 119875119909 (45)
(36) yields
119909 = 119875minus1119867119875119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (46)
That is119909 = 119869119867119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (47)
The solution to system (47) is given by
119909 (119905) = 119890119869119867119905119909 (0)+ 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(48)
Since 119909 = 119875minus1119909 it is possible to write119909 (119905) = 119875119890119869119867119905119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(49)
Let 119867 isin R119899119901times119899119901 with eigenvectors 119901119892 isin C (119892 =1 2 119899119901) Note from Remark 12 that 119901119892 (119892 = 1 2 119899)correspond to the eigenvalues of119860+1198611198701 while eigenvectors119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) correspond to the eigenvalues of119860 + 1198611198701 minus 1205821198711198941198611198702 119894 = 2 3 119899 Then two consensus sub-spaces can be established subspaceC(119867) spanned by119901119892 (119892 =1 2 119899) and a complementary consensus subspace C(119867)spanned by 119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) Therefore theconsensus spaceC119899119901 is given by
C119899119901 = C oplusC (50)
Since the eigenvalues of119867 correspond to the eigenvaluesof119860+1198611198701 and119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 matrix 119890119869119867119905can be written as
119890119869119867119905 = [119890119869119862119905 00 119890119869119862119905] (51)
defining
119909 (0) = 119909119862 (0) + 119909119862 (0) (52)
Equation (49) can now be rewritten as
119909 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579
(53)
Considering that the solution of the closed-loop system(53) can be expressed as
119909 (119905) = 119909119862 (119905) + 119909119862 (119905)+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(54)
and noting that the limit when 119905 997888rarr infin of the third term in(54) is a constant value thus
lim119905997888rarrinfin119890119908119891 (119905) = 0 (55)
The system consensus state can be established by meansof the analysis of 119909119862(119905) and 119909119862(119905) From (53) and (54) 119909119862(119905)is given by
119909119862 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909119862 (0) (56)
Describing the initial state as
119909 (0) = 119909119862 (0) + 119909119862 (0)= 119901sum119892=1
120572119892 (0) 119901119892 +119899119901sum119892=119901+1
120572119892 (0) 119901119892= 119875 [1205721 (0) 120572119901 (0) 0 0]119879+ 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(57)
thus
119909119862 (0) = 119875 [1205721 (0) 120572119901 (0) 0 0]119879119909119862 (0) = 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(58)
where 120572119892(0) 119892 = 1 2 119899119901 are real constants From (58)119909119862(119905) yields119909119862 (119905) = 119875[119890
119869119862119905 00 119890119869119862119905] [1205721 (0) 120572119901 (0) 0 0]
119879 (59)
That is
119909119862 (119905) = 119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]119879
0 ] (60)
8 Mathematical Problems in Engineering
Since 119869119862 is the Jordan block of 119867 corresponding to theeigenvalues of119860+1198611198701 and considering that the pair (119860 119861) iscontrollable it can be concluded that the pair (119860 + 1198611198701 119861) isalso controllable and therefore the right choice of matrix 1198701guarantees that 119909119862(119905) achieves consensus Now 119909119888(119905) is givenby
119909119862 (119905)= 119875[119890119869119862119905 00 119890119869119862119905] [0 0 120572119901+1 (0) 120572119899119901 (0)]
119879 (61)
that yields
119909119862 (119905) = 119875[[0
119890119869119862119905 [120572119901+1 (0) 120572119899119901 (0)]119879]] (62)
And since 119869119862 is the Jordan block of 119867 corresponding tothe eigenvalues of 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 3 119899 thenit can be concluded that for system (28) to achieve consensusmatrices119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 must be Hurwitzwhich implies
lim119905997888rarrinfin119909119862 (119905) = 0 (63)
Considering (60) and (63) the system consensus value isgiven by
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin
119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ]
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1
times (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119890119908119891 (120579 minus 119891120591) 119889120579
(64)
Since it has been shown that lim119905997888rarrinfin119890119908119891(119905) = 0lim119905997888rarrinfin119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579 = 119864(65)
with a real constant vector 119864 thenlim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ] + 119864 (66)
Finally defining
[1205731 (119905) 120573119901 (119905)]119879 = 119890119869119862119905 [1205721 (0) 120572119901 (0)]119879 (67)
and considering that Lemma 4 from [7] proves that the first119901 eigenvectors of119867 are given by 119901119892 = 1119899 otimes 119888119895 for 119892 = 1 119901
1 2 3
456
Figure 1 Communication topology
where 119888119892 are the eigenvectors of 119860 + 1198611198701 and 1119899 isin R119899 is thevector with all of its entries equal to one the consensus value(66) yields
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin1119899
otimes [1198881 119888119901] [1205731 (119905) 120573119901 (119905)]119879 + 119864(68)
Remark 14 It should be noted that the previous proof isbased on the corresponding proof presented in [7] with thedifference that the proof presented in this work includes thepredicted state used in the consensus protocol which resultsin a consensus value affected by the initial injection errorsrepresented by 119864 in (68)
Remark 15 Notice that the prediction-observation schemeproposed here can compensate the time-delay of the agentswhen it is placed either at the input or at the output Inthe case of agents with input time-delay each agent willestimate its own future state and send it to its neighborswhich will use them to calculate its own control thuscompensating their input time-delay In the case where theagents present an output time-delay once again each agentwould estimate its current state from its delayed output andsend the undelayed estimated state to the other agents Inboth cases the consensus will be achieved by means of adecentralized algorithm
6 Numerical Evaluations
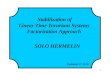
Numerical evaluations of the proposed solution carriedout consider two cases the Multiagent Supporting System(MASS) composed by six agents presented in [7] and a mul-tiagent system formed by six agents with unstable dynamicswhose stabilization is achieved in [31] For simplicity inboth cases the communication topology is used depicted inFigure 1 with the corresponding Laplacian matrix given by
L =[[[[[[[[[[[[
1 0 0 0 0 minus1minus1 1 0 0 0 00 minus1 2 minus1 0 00 0 0 1 minus1 00 0 0 minus1 1 0minus1 0 0 0 minus1 2
]]]]]]]]]]]]
(69)
Mathematical Problems in Engineering 9
0 t108642
minus2
0
2
4
6
x11x21x31
x41x51x61
Figure 2 Time evolution of the state MASS system 120591 = 12119904
0 t108642
minus8minus6minus4minus2024
x12x22x32
x42x52x62
Figure 3 Time evolution of the state MASS system 120591 = 12119904
Example 1 In the case of the MASS system the dynamics ofeach agent is given by
119894 (119905) = [[[0 1minus119896119898119894minus119863119898119894]]]119909119894 (119905) + [01] 119906 (119905 minus 120591119894) (70)
where 119909119894(119905) = [119911119894(119905) 119894(119905)]119879 119911119894(119905) is the height of each agent119898119894 is the mass 119863 is the damping at each agent 119896 is thestiffness and 119906119894(119905) is the control input The implementationof the predictor considers a partition of119898 = 4 and the systemparameters 119898119894 = 106 119896 = 120 and 119863 = 505 The initialconditions are set as
1199090 = [minus3 minus15 minus2 minus2 0 1 4 minus1 2 3 6 2]119879 (71)
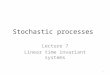
The gain matrix for the predictor-observer is given byŁ119894 = [1 0 4 0]119879 and the consensus gain vectors 1198701 =[113208 minus02358] and 1198702 = [88687 1] The delay consid-ered is 120591 = 12119904 the results are given in Figures 2 3 4 and 5that represent the evolution in time of the state observationerrors and control signal respectively The evolution of thelogarithm of the homogeneous norm of the prediction erroris depicted in Figure 6 to show its exponential convergence Itcan be seen that with the partition of the predictor-observerlarge delays can be compensated
minus2
0
2
4
6
ew11ew21ew31
ew41ew51ew61
minus8minus6minus4minus2024
ew12ew22ew32
ew42ew52ew62
0 t108642
0 t108642
Figure 4 Time evolution of the estimation errors MASS system120591 = 12119904
minus1
0
1
2
3
4
u1u2u3
u4u5u6
0 t108642
Figure 5 Time evolution of the control signal MASS system 120591 =12119904
Example 2 In a more challenging situation an unstablesystem presented in [31] is taken into account to form amultiagent system with 119899 = 6 and the communicationtopology presented in Figure 1 The dynamics of each agentis given by
(119905) = [minus5 minus63 4 ] 119909 (119905) + [04] 119906 (119905 minus 120591)
119910 (119905) = [minus2 2] 119909 (119905) (72)
10 Mathematical Problems in Engineeringlog((e))
1
0
minus1
minus2
minus3
minus4
minus5
0 t108642
Figure 6 Time evolution of the logarithm of the prediction errorMASS system 120591 = 12119904
0 5 10 t
minus20
minus10
0
10
20
x11x21x31
x41x51x61
0 5 10 tminus20
minus10
0
10
20
x12x22x32
x42x52x62
Figure 7 Time evolution of the state unstable agents 120591 = 1119904
The delay of the system is 120591 = 1119904 the partition of theobserver is119898 = 4 and the initial conditions are set as
1199090 = [minus3 02 minus1 05 3 1 minus15 0 4 minus12 minus2 0]119879 (73)
The gain of each subpredictor is given by119871 119894 = [minus08212 07263]119879 and the control gains are1198701 = [minus05417 minus 075] and 1198702 = [minus4 03] Figures 7and 8 present the evolution in time of the state of the systemand the prediction errors respectively where after a transientperiod the desired convergence is obtained Figure 9 presentsthe evolution of the control signal The logarithm of thenorm of the prediction error is presented in Figure 10
0 5 10 tminus20
minus10
0
10
ew11ew21ew31
ew41ew51ew61
0 5 10 t
minus10
0
10
20
ew12ew22ew32
ew42ew52ew62
Figure 8 Time evolution of the estimation errors unstable agents120591 = 1119904
0 5 10 t
minus6
minus4
minus2
0
2
4
6
u1u2u3
u4u5u6
Figure 9 Time evolution of the control signal unstable agents 120591 =1119904
7 Conclusions
This work deals with the consensus problem for multiagentsystems with LTI dynamics and input time-delay A modifiedpartitioned predictor-observer is proposed to estimate thefuture state values of the agents These predicted states areused in the consensus protocol in order to compensatethe input time-delays Formal proofs for the convergenceof the predictor and consensus are given The performednumerical evaluations show that a larger number of partitions
Mathematical Problems in Engineering 11
0 5 10 t
log((e))
25
2
15
1
05
0
minus05
minus1
Figure 10 Time evolution of the logarithm of the prediction errorunstable agents 120591 = 1119904
in the predictor-observer results in an improvement of theresponse of the system and in a larger time-delay that can becompensated
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] W Ren and E Atkins ldquoDistributed multi-vehicle coordinatedcontrol via local information exchangerdquo International Journal ofRobust and Nonlinear Control vol 17 no 10-11 pp 1002ndash10332007
[2] R Olfati-Saber and R M Murray ldquoDistributed cooperativecontrol ofmultiple vehicle formations using structural potentialfunctionsrdquo IFACWorld Congress 2002
[3] J A Fax and R M Murray ldquoInformation flow and cooperativecontrol of vehicle formationsrdquo IEEE Transactions on AutomaticControl vol 49 no 9 pp 1465ndash1476 2004
[4] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[5] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbour rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[6] L Moreau ldquoConsensus and cooperation in networked multi-agent systemsrdquo IEEE Transactions onAutomatic Control vol 50no 2 pp 169ndash182 2005
[7] J Xi N Cai and Y Zhong ldquoConsensus problems for high-orderlinear time-invariant swarm systemsrdquo Physica A StatisticalMechanics and its Applications vol 389 no 24 pp 5619ndash56272010
[8] W Ren and R W BeardDistributed Consensus in Multi-VehicleCooperative Control Theory and Applications Springer-VerlagLondon UK 2008
[9] L Peng J Yingmin D Junping and Y Shiying ldquoDistributedconsensus protocol for second-order agents with fixed topology
and time-delayrdquo in Proceedings of the 26th Chinese ControlConference (CCC rsquo07) pp 577ndash581 2007
[10] Z Yan D Wu and Y Liu ldquoConsensus of discrete multiagentsystem with various time delays and environmental distur-bancesrdquo Entropy vol 16 no 12 pp 6524ndash6538 2014
[11] D Lee and M W Spong ldquoAgreement with non-uniforminformation delaysrdquo in Proceedings of the American ControlConference IEEE 2006
[12] P Lin and Y Jia ldquoConsensus of a class of second-order multi-agent systems with time-delay and jointly-connected topolo-giesrdquo IEEE Transactions on Automatic Control vol 55 no 3 pp778ndash784 2010
[13] P Lin and Y Jia ldquoConsensus of second-order discrete-timemulti-agent systems with nonuniform time-delays and dynam-ically changing topologiesrdquoAutomatica vol 49 no 5 pp 2154ndash2158 2009
[14] J Xi Z Shi and Y Zhong ldquoConsensus analysis and designfor high-order linear swarm systems with time-varying delaysrdquoPhysicaA StatisticalMechanics and its Applications vol 390 no23-24 pp 4114ndash4123 2011
[15] J Xi Z Wang G Liu and Y Zhong ldquoConsensus problems forlinear time-varying swarm systemswith topology variances andmultiple time delaysrdquo in Proceedings of the 2013 32nd ChineseControl Conference (CCC rsquo13) pp 192ndash198 2013
[16] X Luo X Li S Li and X Guan ldquoConsensus for linear multi-agent systems with constant and time-varying communicationdelays via delay-decomposition approachrdquo in Proceedings of the11th World Congress on Intelligent Control and Automation pp353ndash358 2014
[17] Y Cao T Oguchi P Verhoeckx and H Nijmeijer ldquoConsensuscontrol for a multiagent systemwith time delaysrdquoMathematicalProblems in Engineering vol 2017 Article ID 4063184 11 pages2017
[18] S Mehra and S R Sahoo ldquoTrajectory tracking with input delayinmulti-agent system Double integrator caserdquo in Proceedings ofthe 2016 International Conference onUnmannedAircraft Systems(ICUAS rsquo16) pp 387ndash393 2016
[19] S Mehra A Sen and S R Sahoo ldquoTrajectory tracking inheterogeneous multi-agent system without and with inputdelayrdquo in Proceedings of the 2017 Indian Control Conference (ICCrsquo17) pp 338ndash343 2017
[20] B Zhou and Z Lin ldquoConsensus of high-order multi-agent sys-tems with large input and communication delaysrdquo Automaticavol 50 no 2 pp 452ndash464 2014
[21] C Wang Z Zuo Z Lin and Z Ding ldquoA truncated predictionapproach to consensus control of lipschitz nonlinearmultiagentsystems with input delayrdquo IEEE Transactions on Control ofNetwork Systems vol 4 no 4 pp 716ndash724 2017
[22] P Shi and Q K Shen ldquoObserver-based leader-following con-sensus of uncertain nonlinear multi-agent systemsrdquo Interna-tional Journal of Robust and Nonlinear Control 2017
[23] O J M Smith ldquoCloser control of loops with deadtimerdquoChemical Engineering Progress vol 53 no 5 pp 217ndash219 1957
[24] K Watanabe and M Ito ldquoA process-model control for linearsystems with delayrdquo IEEE Transactions on Automatic Controlvol 26 no 6 pp 1261ndash1269 1981
[25] W Michiels and D Roose ldquoTime-delay compensation inunstable plants using delayed state feedbackrdquo in Proceedings ofthe 40th IEEE Conference on Decision and Control rsquo01 vol 2 pp1433ndash1437 IEEE 2001
12 Mathematical Problems in Engineering
[26] A Manitius and A W Olbrot ldquoFinite spectrum assignmentproblem for systems with delaysrdquo IEEE Transactions on Auto-matic Control vol 24 no 4 pp 541ndash553 1979
[27] Z Artstein ldquoLinear systems with delayed controls a reductionrdquoIEEE Transactions on Automatic Control vol 27 no 4 pp 869ndash879 1982
[28] L Mirkin and N Raskin ldquoEvery stabilizing dead-time con-troller has an observerndashpredictor-based structurerdquo Automaticavol 39 no 10 pp 1747ndash1754 2003
[29] S Mondie and W Michiels ldquoFinite spectrum assignment ofunstable time-delay systems with a safe implementationrdquo IEEETransactions on Automatic Control vol 48 no 12 pp 2207ndash2212 2003
[30] B Zhou ldquoInput delay compensation of linear systems with bothstate and input delays by nested predictionrdquoAutomatica vol 50no 5 pp 1434ndash1443 2014
[31] M Najafi S Hosseinnia F Sheikholeslam and M KarimadinildquoClosed-loop control of dead time systems via sequential sub-predictorsrdquo International Journal of Control vol 86 no 4 pp599ndash609 2013
[32] F Sheikholeslam S Hosseinnia M Najafi and Q WangldquoRobust H infin control of single input-delay systems based onsequential sub-predictorsrdquo IET Control Theory amp Applicationsvol 8 no 13 pp 1175ndash1184 2014
[33] F Cacace F Conte A Germani and G Palombo ldquoOptimalcontrol of linear systems with large and variable input delaysrdquoSystems amp Control Letters vol 89 pp 1ndash7 2016
[34] F Cacace A Germani and C Manes ldquoPredictor-based controlof linear systems with large and variable measurement delaysrdquoInternational Journal of Control vol 87 no 4 pp 704ndash714 2014
[35] F Mazenc and M Malisoff ldquoStabilization and robustness anal-ysis for time-varying systems with time-varying delays usinga sequential subpredictors approachrdquo Automatica vol 82 pp118ndash127 2017
[36] A Germani C Manes and P Pepe ldquoA new approach to stateobservation of nonlinear systems with delayed outputrdquo Instituteof Electrical andElectronics Engineers Transactions onAutomaticControl vol 47 no 1 pp 96ndash101 2002
[37] M Velasco-Villa J Heras-Godınez J A Vazquez-Santacruzand V Fragoso-Rubio ldquoDelayed consensus problem for singleand double integrator systemsrdquo Mathematical Problems inEngineering vol 2015 Article ID 461098 15 pages 2015
[38] V Fragoso-Rubio M Velasco-Villa and M A Hernandez-Perez ldquoConsensus problem for linear time invariant systemswith time-delayrdquo in Proceedings of the National Conference ofAutomatic Control rsquo17 pp 90ndash95 2017
[39] C Godsil and G Royle Algebraic Graph Theory Springer NewYork NY USA 2001
[40] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[41] W Michiels K Engelborghs P Vansevenant and D RooseldquoContinuous pole placement for delay equationsrdquo Automaticavol 38 no 5 pp 747ndash761 2002
[42] K Gu V L Kharitonov and J Chen Stability of Time-DelaySystems Birkhauser 2003
[43] R E Bellman and K L Cooke Differential-Difference Equa-tions Rand Corporation 1963
[44] I Estrada-Sanchez M Velasco-Villa and H Rodrıguez-CortesldquoPrediction-based control for nonlinear systems with inputdelayrdquoMathematical Problems in Engineering vol 2017 ArticleID 7415418 11 pages 2017
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

2 Mathematical Problems in Engineering
is compensated by means of a state predictor The consensusproblem of high-order multiagent systems with input andoutput communication delays is solved in [20] by means ofa truncated predictor-based schemeThe truncated predictorapproach is extended in [21] to compensate the input time-delay of nonlinear systems in order to achieve consensuswhile a nonlinear adaptive observer estimates the states ofthe agents that are used in the adaptive control scheme thatis proposed in [22] to achieve leader-following consensus foruncertain nonlinear multiagent systems
The control problem of systems with time-delays hasalso been of the interest of the scientific community Toovercome this difficulty many solutions have been presentedA first approach was the Smith Predictor [23] composed by acontrol designed without considering the system time-delayand a prediction of the output that compensates the delaySeveral modifications of the scheme were later presentedto overcome its shortcomings and to expand the types ofsystems where it is applicable see [24 25] being some of theseworks The assignment of a finite spectrum of the closed-loop system (Finite Spectrum Assignment) is the goal of theapproach presented in [26] The reduction strategy in [27]is motivated by a similar idea However in these solutionsthe dimension of the feedback law is infinite which impliesthat the implementation of this method must be realizedby means of a numerical approximation Safe numericalimplementations are presented in [28 29]
The prediction approach took a step further in [30] wherethe state prediction is attained for linear systems with bothinput and state delays Nonetheless these chained observersare composed by distributed terms in which implementationrequires a numerical approximation It is in the work ofNajafi et al [31] where a group of chained predictors withfinite spectrum is proposed to compensate the input delay oflinear MIMO systems The approach assumes that the wholesystem state can be measured and guarantees asymptoticstability of the closed-loop system and prediction errorThe stability proof of the closed-loop system results in amethod to calculate the gain matrices of the predictor andthe control bymeans of LinearMatrix Inequalities (LMI)Thework is extended in [32] where robust 119867infin control is usedto minimize the input disturbance effect on the predictionerror for linear systems with input time-delay The idea ofa sequence of predictors has been applied to linear systemswith time-varying input [33] and time-varying output [34]time-delays and to time-varying systems with time-varyingdelays [35] In [36] the state of a nonlinear system withdelayed output is reconstructed by means of a chained setof observers The main advantage of the chained predictorsresides on their ability to deal with larger time-delays
Based on the idea of the nested predictor [31 34] thepresent paper deals with the consensus problem of LTIsystems with constant time-delay by proposing a modifi-cation of the predictor-observer scheme presented in [37]that estimates the state of the system forecasted 120591 units oftime into the future The predictor assumes that only a partof the state space can be measured and the definition ofthe subpredictor errors allows proving that its convergenceimplies the convergence of the predicted state to the future
system state The estimated future state is later on used bythe consensus algorithm to compensate the input delay ofthe system It is important to note that since there is a time-delay in the input of the systems by using the forecastedestimated state the closed-loop system will be in terms ofthe current state which results in the compensation of theinput time-delay The consensus protocol presented here isan adaptation of the one proposed in [7] for LTI systemsand initially adapted for the input delay case in [38] Themodification to the protocol that we propose consists of usingthe predicted future state instead of the current and delayedstates which allows systems with larger delays to achieveconsensus as it will be shown in the numerical evaluations
The work is organized as follows in Section 2 a briefrevision of the graph theory and the properties of the Lapla-cian matrix is presented Section 3 presents the statement ofthe problem and then the predictor-observer scheme thatallows estimating the future state of the system is developedin Section 4 The consensus algorithm is given in Section 5and the results of the numerical evaluations can be found inSection 6The work ends with some conclusions in Section 7
2 Graph Theory and Laplacian Matrix
Graph theory is the mathematical tool used to modelthe information exchange among agents [39] This sectionpresents some basic concepts of graph theory and propertiesof the Laplacian matrix that are of the interest of this work
Let G = NE be an ordered graph where N is thenonempty node set N = 1 119899 and E sub N timesN is theedge set An edge inG is given by 119890119894119895 = (119894 119895)
A directed graph is a pair (NE) where the edge 119890119894119895 isin Eindicates that agent 119895 can obtain information from agent 119894 butnot necessarily in the other way The edge (119894 119895) has a node 119894that is called the parent node and a node 119895 called child nodeA directed path is an edge sequence in a directed graph ofthe form (1198941 1198942) (1198942 1198943) A directed tree is a directed pathwith every node having exactly one parent except for a nodecalled root node that has no parent node and has directedpaths to every other node A subgraph (119881119904E119904) of (119881E) issuch that119881119904 sub 119881 andE119904 sub Ecap(119881119904 times119881119904) A directed spanningtree (119881119904E119904) of the directed graph (119881E) is a subgraph with adirected path where 119881119904 = 119881
The adjacencymatrix119860 = [119886119894119895] isin R119899times119899 of a directed graphwith the set nodeN = 1 119899 is such that the weight 119886119894119895 ispositive if (119894 119895) isin E and 119886119894119895 = 0 if (119894 119895) notin E When weightsare not relevant 119886119894119895 = 1 if (119894 119895) isin E
21 LaplacianMatrix TheLaplacianmatrixL = [119897119894119895] isin R119899times119899of a directed graph is given by 119897119894119894 = sum119899119895=1119895 =119894 119886119894119895 and 119897119894119895 = minus119886119894119895for every 119894 = 119895 Some remarkable properties of this matrix areconsidered
(i) 119897119894119895 le 0 119894 = 119895(ii) The sum of the elements of every row equals zerosum119899119895=1 119897119894119895 = 0 119894 = 1 119899(iii) For directed and undirected graphs 1205821198711 = 0 is an
eigenvalue of L due to the fact that the sum of all
Mathematical Problems in Engineering 3
the elements of a row equals zero There also existsan eigenvector 1119899 = [1 1]119879 with 119899times1 dimensionscorresponding to the zero eigenvalue
(iv) All of the eigenvalues 120582119871119894 of L different from zeroare positive (for directed graphs) or have positive realparts (for undirected graphs) Therefore the real partof every eigenvalue of minusL is negative
3 Problem Statement
Thiswork deals with the consensus problem for a set of agentswith input time-delayThe dynamics of the agents is modeledas linear time-invariant systems with input time-delay andfixed communication topology The graph that models thecommunication is considered to be either directed with aspanning tree or undirected and connected which impliesthat one of the eigenvalues of the Laplacianmatrix equals zero[40]
Each agent is considered to be a 119901-dimensional Multiple-Input-Multiple-Output (MIMO) linear system with the sameinput time-delay and dynamics given by
119894 (119905) = 119860 119894119909119894 (119905) + 119861119894119906119894 (119905 minus 120591119894)119910119894 (119905) = 119862119894119909119894 (119905) (1)
for 119894 = 1 2 119899 where 119909119894 = [1199091198941 119909119894119901]119879 isin R119901 representsthe state of the 119894-th agent 119906119894 isin R119902 is the input control 120591119894 gt 0is a known constant input time-delay 119910119894 isin R119903 is the outputsignal and 119860 119894 isin R119901times119901 119861119894 isin R119901times119902 and 119862119894 isin R119903times119901 It isimportant to note that every parameter is associated with the119894-th agent
Consensus Problem A system of 119899 agents is said to achieveconsensus if for any initial condition 119909119894(0) 119909119894(119905) 997888rarr 119909119895(119905) as119905 997888rarr infin for all 119894 119895 = 1 119899 [1]
To solve the consensus problem for multiagent systems aprotocol is presented in [7] for agents without communica-tion delay with dynamics given by
119894 (119905) = 119860 119894119909119894 (119905) + 119861119894119906119894 (119905) (2)
The consensus protocol is given by
119906119894 (119905) = 1198701119909119894 (119905) + 1198702Σ119899119895=1119886119894119895 (119909119895 (119905) minus 119909119894 (119905)) (3)
for 119894 119895 = 1 119899 where 119886119894119895 are the elements of the adjacentmatrix and1198701 and1198702 are constant gainmatricesThe authorspresent necessary and sufficient conditions for consensus andconsensualization
4 Predictor-Observer Scheme
To compensate the time-delay present in the dynamics ofthe agents a predictor-observer scheme is proposed Theobjective is to estimate the future state of the agents 120591119894 unitsof time ahead to later design a consensus scheme basedon the predicted state It is important to note that the use
of predicted future states on time-delayed systems avoidsthe numerical implementation problems present in solutionswith infinite spectrum even more the partitioned nature ofthe scheme proposed by this work allows compensating largetime-delaysThe design of the predictionndashobserver scheme isdone under the following assumptions
Assumption 1 Signals 119910(119905) and 119906(119905) are available formeasure-ment
Assumption 2 For system (1) the pair (119860 119894 119861119894) is controllableand (119860 119894 119862119894) is observableAssumption 3 Consider that for the time delay 120591119894 in (2) thereexists an integer119898119894 gt 0 such that 120591119894 = 120591119894119898119894Remark 4 Notice that Assumption 3 is just a technicalrequirement in order to avoid the consideration of irrationalvalues for the timendashdelay 120591119894 that could yield an approximateprediction
For the 119894-th agent a set of advanced variables can bedefined as
1199081198941 (119905) = 119909119894 (119905 + 120591119894)1199081198942 (119905) = 1199081198941 (119905 + 120591119894) = 119909119894 (119905 + 2120591119894)
119908119894119898 (119905) = 119908119894119898minus1 (119905 + 120591119894) = 119909119894 (119905 + 119898120591119894) = 119909119894 (119905 + 120591119894)
(4)
where 119908119894119891 = [1199081198941119891 1199081198942119891 119908119894119901119891]119879 for 119891 = 1 119898 refers tothe 119901-dimensional vector state Taking the time derivative of(4) it is obtained that
119894119891 = 119860 119894119908119894119891 + 119861119894119906 (119905 minus (119898 minus 119891) 120591119894) (5)
for 119891 = 1 119898 In particular for 119891 = 119898119894119898 = 119860 119894119908119894119898 + 119861119894119906 (119905) (6)
and a free-delay dynamic is obtainedNotice that system (6) represents the evolution of system
(1) forecasted 120591119894 units of time without input-delayFor system (6) the following predictor-observer is pro-
posed
119908119894119891 = 119860 119894119908119894119891 + 119861119894119906119894 (119905 minus (119898 minus 119891) 120591119894) + 119871 119894119862119894119890119908119894119891 (119905 minus 120591119894) (7)
for 119891 = 1 119898 where 119871 119894 isin R119901times119903 is a gain matrix and theerror signal
119890119908119894119891 (119905) = [1198901199081198941119891 (119905) 119890119908119894119901119891 (119905)]119879 (8)
takes the form
1198901199081198941 (119905) = 119909119894 (119905 + 120591119894) minus 1199081198941 (119905) 119890119908119894119891 (119905) = 119908119894119891minus1 (119905 + 120591119894) minus 119908119894119891 (119905) for 119891 = 2 3 119898 (9)
4 Mathematical Problems in Engineering
The error dynamics (9) is given by
1198901199081198941 (119905) = 119894 (119905 + 120591119894) minus 1199081198941 (119905) 119890119908119894119891 (119905) = 119908119894119891minus1 (119905 + 120591119894) minus 119908119894119891 (119905)
for 119891 = 2 3 119898(10)
resulting in
1198901199081198941 (119905) = 119860 1198941198901199081198941 (119905) minus 119871 1198941198621198941198901199081198941 (119905 minus 120591119894) 119890119908119894119891 (119905) = 119860 119894119890119908119894119891 (119905) + 119871 119894119862119894119890119908119894119891minus1 (119905)
minus 119871 119894119862119894119890119908119894119891 (119905 minus 120591119894) (11)
with 119891 = 2 3 119898 The vectorial form of (11) is the time-delay error system given by
119890119908119894 (119905) = 119860lowast0119890119908119894 (119905) + 119860lowast1119890119908119894 (119905 minus 120591119894) (12)
with 119890119908119894 = [1198901199081198941 119890119908119894119898]119879 for 119894 = 1 119899 and
119860lowast0 =[[[[[[[
119860 119894 0 sdot sdot sdot 0 0119871 119894119862119894 119860 119894 sdot sdot sdot 0 0 d
0 0 sdot sdot sdot 119871 119894119862119894 119860 119894
]]]]]]]
119860lowast1 = [[[[[
minus119871 119894119862119894 sdot sdot sdot 0 d
0 sdot sdot sdot minus119871 119894119862119894
]]]]]
(13)
where 0 isin R119901times119901 is a matrix with all inputs equal to zero
41 Related Predictor Scheme The predictor given by (7) isequivalent to the sequential subpredictors strategy proposedby [31] that is recalled in the following
Consider system (1) and assume that all the state 119909(119905) isavailable for measurement this is 119862119894 = 119868
(119905) = 119860119909 (119905) + 119861119906 (119905 minus 120591) (14)
and there exists119898 isinZ+ such that
120591 = 120591119898 (15)
which allows proposing the sequence of subpredictors givenby
1 (119905) = 1198601199091 (119905) + 1198711 (1199091 (119905 minus 120591) minus 1199092 (119905)) + 119861119906 (119905)
119894 (119905) = 119860119909119894 (119905) + 119871 119894 (119909119894 (119905 minus 120591) minus 119909119894+1 (119905))+ 119861119906 (119905 minus (119894 minus 1) 120591)
119898 (119905) = 119860119909119898 (119905) + 119871119898 (119909119898 (119905 minus 120591) minus 119909119898+1 (119905))+ 119861119906 (119905 minus (119898 minus 1) 120591)
(16)
with 119909119894 isin R119899 119894 = 1 119898 The prediction errors for eachsubpredictor are defined as
119890119894 (119905) = 119909119894 (119905 minus (119898 minus 119894 minus 1) 120591) minus 119909119894+1 (119905 minus (119898 minus 1) 120591)119890119898 (119905) = 119909119898 (119905 minus 120591) minus 119909 (119905) (17)
for 119894 = 1 119898 minus 1 and the error dynamics given by
119890119894 (119905) = 119860119890119894 (119905) + 119871 119894119890119894 (119905 minus 120591) minus 119871 119894+1119890119894+1 (119905 minus 120591)119890119898 (119905) = 119860119890119898 (119905) + 119871119898119890119898 (119905 minus 120591) (18)
for 119894 = 1 119898 minus 1 Asymptotic convergence for the errordynamics is guaranteed by means of an LMI method thatconsiders the closed-loop system that allows calculating thesubpredictors and controlling gain matrices
Themain difference between both schemes is that authorsin [31] consider systems where it is possible to read the wholestate and the predictor-observer (7) presented here includesthe cases when only a partial measurement is available Therelation between both schemes can be found considering thefollowing coordinate change
1199081 (119905) = 119909119898 (119905)
119908119898 (119905) = 1199091 (119905) (19)
and for the error signals
119890119908119894 (119905) = minus119890119898+1minus119894 (119905 + (119898 + 1 minus 119894) 120591) (20)
for 119894 = 1 119898 to subpredictors (16) and prediction errors(17) and assuming 119862 = 119868 in system (1) results in the chain ofpredictors (7) and error signals (12)
Remark 5 It is important to note that the predictor (16)cannot be used to estimate the future state of system (1) when119862119894 = 11986842 Convergence Analysis of the Predictor-Observer Theconvergence to zero of the injection errors (9) is assured byshowing the stability of the error dynamics (12)
Mathematical Problems in Engineering 5
Lemma 6 Let the predictor-observer (7) satisfy Assumptions1 2 and 3 Suppose that there exist positive gain matrices 119871 119894 for119894 = 1 2 119899 such that the matrix (119860 119894minus119871 119894119862119894) is Hurwitz thenthere exists a sufficiently large119898119894 such that the error signals (9)exponentially converge to zero
Proof The characteristic equation of (12) is given by
119901 (119904) = det (119904119868119898119901 minus 119860lowast0 minus 119860lowast1119890minus119904120591119894) = 0 (21)
It is possible to show that (21) can be rewritten as
119901 (119904) = 119898prod119891=1
(119868119899119904 minus 119860 119894 + 119871 119894119862119894119890minus119904120591119894) = 0 (22)
It is clear that every factor of (22) represents the Laplacetransform of a system of the form
119890119908119894119891 (119905) = 119860 119894119890119908119894119891 (119905) minus 119871 119894119862119894119890119908119894119891 (119905 minus 120591119894) (23)
Since the parameters of 119871 119894 are free from the observabilityassumption of the pair (119860 119894 119862119894) it is always possible to locatethe eigenvalues of the matrix 119860 119894 minus 119871 119894119862119894 in the left halfcomplex plane The Hurwitz property of matrix 119860 119894 minus 119871 119894119862119894assures the stability of the differential difference equation(23) for a sufficiently small time delay 120591119894 [41] The maximumtime delay 120591lowast119894 for which system (23) will be asymptoticallystable depends on the choice of the observer gain 119871 119894 and itscomputation is not an easy task since its complexity rises asthe dimension of the system increases Thus given a gain119871 119894 such that 119860 119894 minus 119871 119894119862119894 is a Hurwitz matrix it is alwayspossible to asymptotically stabilize the prediction error (23)for a constant time delay 120591119894 lt 120591lowast119894 This fact can be verifiedfor instance by considering [42] or by reviewing the poleassignment procedure given in [41] Based on the abovearguments it will be assumed without loss of generality thatthere exist 119871 119894 and 120591lowast119894 such that system (23) is asymptoticallystable for 0 le 120591119894 lt 120591lowast119894 It should also be noticed that thestability of (23) is not only asymptotic but also exponential[43] Furthermore if matrix 119871 119894 is chosen according to the rulegiven inTheorem 31 in [34] this is
119871 = 119890119860119900120591lowast (24)
with
119860119900 = 119860 minus 119871119862 (25)
where 119871 is such that all the real parts of the eigenvalues of 119860119900are smaller than some negative real constant 120572 it is possibleto guarantee the exponential convergence of the predictionerrors 119890119908119894119891(119905) to zero which results in the convergence of theestimated future state 119908119894119898(119905) to the real future value 119909(119905 + 120591119894)Remark 7 It should be pointed out that a predictor of theform (23) with 119898 = 1 designed for a system with timedelay at the output was considered in [25] also for the case119898 = 1 in [44] a predictor for a nonlinear input delay systemis designed As mentioned before the partitioned predictorpresented in [31] is similar to the one presented in this sectionconsidering 119862 = 119868
Remark 8 Notice that in the case of 120591119894 = 0 the errordynamics (23) takes the form
119890119908119894119891 (119905) = (119860 119894 minus 119871 119894119862119894) 119890119908119894119891 (119905) (26)
where the stability is determined by the eigenvalues of thematrix 119860 119894 minus 119871 119894119862119894 that by the observability assumption canalways be stabilizable
Remark 9 It should be noticed that 120591119894 is given by 120591119894 =119898120591119894 therefore the larger number of subdelays considered byscheme (7) is the larger delay 120591119894 can be compensated withthe drawback of an increasing dimension of the proposedpredictor-observer
The following result allows obtaining the estimated values119909119894(119905 + 119891120591119894) from the future real values 119909119894(119905 + 119891120591119894) in (4)
Lemma 10 Suppose for system (1) that Assumptions 1 2 and3 are satisfied For every 120591119894 gt 0 there always exists a predictor-observer (7) such that the estimated states 119908119894119891(119905) exponentiallyconverge to the future values 119909119894(119905 + 119891120591119894) for 119891 = 1 119898Proof From the definition of error (9) it is possible to showthat
119908119894119891 (119905) = 119909 (119905 + 119891120591119894) minus119891sum119896=1
119890119908119894119896 (119905 + (119891 minus 119896) 120591119894) (27)
for 119896 = 1 119891 Then by Lemma 6 it is possible to concludethat the estimated states 119908119894119891(119905) exponentially converge to thecorresponding real values
Remark 11 Note that if119898 997888rarr infin then 120591119894 997888rarr 0 relaxing theconvergence conditions of the estimation error This impliesthat it is always possible to stabilize system (12) choosing theinteger119898 large enough
5 Consensus Problem
In this section the consensus protocol for LTI systemsin time-delay is presented The set of agents has a fixedcommunication topology that contains a directed spanningtreeThe dynamics of each agent is given by (1)This protocolconsiders the solution presented in [7] that is adapted to beused with the future state values estimated in the previoussection By using the predicted states instead of the currentone it is possible to deal with systems with large time-delays
Consider a set of 119899 agents of the form (1) where for thesake of easy of presentation it is assumed that 120591119894 = 120591 for 119894 =1 119899 that is
119894 (119905) = 119860119909119894 (119905) + 119861119906119894 (119905 minus 120591) (28)
The vectorial form of the complete set of agents is givenby
(119905) = (119868119899 otimes 119860) 119909 (119905) + (119868119899 otimes 119861) 119906 (119905 minus 120591) (29)
where 119909 = [1199091 1199092 119909119899]119879 119906 = [1199061 1199062 119906119899]119879 and 119868119899 isinR119899times119899
6 Mathematical Problems in Engineering
The following control scheme based on the predictor-observer (7) is proposed
119906119894 (119905) = 1198701119908119894119898 (119905) + 1198702 119899sum119895=1
119897119894119895 (119908119895119898 (119905) minus 119908119894119898 (119905)) (30)
for 119894 119895 = 1 2 119899 1198701 1198702 isin R119902times119901 where 119897119894119895 are theentries of the Laplacian matrix of the graph The controlscheme (30) can be rewritten as
119906 (119905) = (119868119899 otimes 1198701 minusL otimes 1198702) 119908119898 (119905) (31)
whereL isin R119899times119899 is the Laplacian of the system and119908119898 =[1199081119898 119908119899119898]119879 is the predicted stateThe closed-loop system (29)ndash(31) is given by
(119905) = (119868119899 otimes 119860) 119909 (119905)+ (119868119899 otimes 119861) (119868119899 otimes 1198701 minusL otimes 1198702) 119908119898 (119905 minus 120591) (32)
Considering that (119860otimes119861)(119862otimes119863) = 119860119862otimes119861119863 it is obtainedthat
(119905) = (119868119899 otimes 119860) 119909 (119905)+ (119868119899 otimes 1198611198701 minusL otimes 1198611198702) 119908119898 (119905 minus 120591) (33)
Recalling the observation errors
1198901199081 (119905) = 119909 (119905 + 120591) minus 1199081 (119905) 119890119908119891 (119905) = 119908119891minus1 (119905 + 120591) minus 119908119891 (119905) for 119891 = 2 3 119898 (34)
the estimated state119908119898(119905minus120591) can be rewritten as a function ofthe real state and the observation errors
119908119898 (119905 minus 120591) = 119909 (119905) minus 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (35)
where 119890119908119891 = [1198901199081119891 119890119908119899119891]119879 producing (119905) = 119867119909 (119905)
+ (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (36)
where119867 = (119868119899 otimes (119860 + 1198611198701) minusL otimes 1198611198702)Consider now a nonsingular matrix 119880 isin R119899times119899 such that
119880minus1L119880 = 119869L (37)
for 119869L isin R119899times119899 representing the Jordan canonical form of theLaplacian matrixL
Considering now the globally invertible change of vari-able
119909 = (119880minus1 otimes 119868119902) 119909 119909 = (119880 otimes 119868119902) 119909 (38)
for 119909 = [1199091 1199092 119909119899]119879 then it is possible to show that
(119880 otimes 119868119902) (119905)= [119868119899 otimes (119860 + 1198611198701)] (119880 otimes 119868119902) 119909 (119905)minus (L otimes 1198611198702) (119880 otimes 119868119902) 119909 (119905)+ [L otimes 1198611198702 minus 119868119899 otimes 1198611198701] 119898sum
119891=1
119890119908119891 (119905 minus 119891120591)(39)
from where
(119905)= [119868119899 otimes (119860 + 1198611198701) minus 119869119871 otimes 1198611198702] 119909 (119905)+ [119880minus1L otimes 1198611198702 minus 119880minus1 otimes 1198611198701] 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (40)
Equation (40) can be rewritten as
(119905) = Γ119909 (119905) + Δ 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (41)
where
Δ = 119880minus1L otimes 1198611198702 minus 119880minus1 otimes 1198611198701 (42)
Γ =[[[[[[[[[[
119860 + 1198611198701 0 0 sdot sdot sdot 00 1205742 1205751198611198702 sdot sdot sdot 0 d d
0 0 sdot sdot sdot 120574119899minus1 12057511986111987020 0 sdot sdot sdot 0 120574119899
]]]]]]]]]]
(43)
with 120574119894 = 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 119899 and 120575 = 0 or120575 = 1 depending on the structure of 119869119871Remark 12 Notice that since 119867 and Γ are similar matricesthey have the same eigenvalues Furthermore in (43) it can beseen that those eigenvalues correspond to the ones of119860+1198611198701and 119860 + 1198611198701 minus 1205821198941198611198702 for 119894 = 2 3 11989951 Consensus Analysis
Lemma 13 Consider a set of 119899 agents of the form (28)with a communication topology with a directed spanning treeUnder these circumstances solution to the consensus problemis achieved if and only if the matrices 119860 + 1198611198701 minus 1205821198711198941198611198702 for119894 = 2 3 119899 are HurwitzProof Let the invertible matrix 119875 = [1199011 1199012 119901119899119901] isinC119899119901times119899119901 be such that
119875minus1119867119875 = 119869119867 (44)
Mathematical Problems in Engineering 7
with 119869119867 being the Jordan canonical formof119867 defined in (36)Considering the change of coordinates
119909 = 119875minus1119909 119909 = 119875119909 (45)
(36) yields
119909 = 119875minus1119867119875119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (46)
That is119909 = 119869119867119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (47)
The solution to system (47) is given by
119909 (119905) = 119890119869119867119905119909 (0)+ 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(48)
Since 119909 = 119875minus1119909 it is possible to write119909 (119905) = 119875119890119869119867119905119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(49)
Let 119867 isin R119899119901times119899119901 with eigenvectors 119901119892 isin C (119892 =1 2 119899119901) Note from Remark 12 that 119901119892 (119892 = 1 2 119899)correspond to the eigenvalues of119860+1198611198701 while eigenvectors119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) correspond to the eigenvalues of119860 + 1198611198701 minus 1205821198711198941198611198702 119894 = 2 3 119899 Then two consensus sub-spaces can be established subspaceC(119867) spanned by119901119892 (119892 =1 2 119899) and a complementary consensus subspace C(119867)spanned by 119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) Therefore theconsensus spaceC119899119901 is given by
C119899119901 = C oplusC (50)
Since the eigenvalues of119867 correspond to the eigenvaluesof119860+1198611198701 and119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 matrix 119890119869119867119905can be written as
119890119869119867119905 = [119890119869119862119905 00 119890119869119862119905] (51)
defining
119909 (0) = 119909119862 (0) + 119909119862 (0) (52)
Equation (49) can now be rewritten as
119909 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579
(53)
Considering that the solution of the closed-loop system(53) can be expressed as
119909 (119905) = 119909119862 (119905) + 119909119862 (119905)+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(54)
and noting that the limit when 119905 997888rarr infin of the third term in(54) is a constant value thus
lim119905997888rarrinfin119890119908119891 (119905) = 0 (55)
The system consensus state can be established by meansof the analysis of 119909119862(119905) and 119909119862(119905) From (53) and (54) 119909119862(119905)is given by
119909119862 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909119862 (0) (56)
Describing the initial state as
119909 (0) = 119909119862 (0) + 119909119862 (0)= 119901sum119892=1
120572119892 (0) 119901119892 +119899119901sum119892=119901+1
120572119892 (0) 119901119892= 119875 [1205721 (0) 120572119901 (0) 0 0]119879+ 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(57)
thus
119909119862 (0) = 119875 [1205721 (0) 120572119901 (0) 0 0]119879119909119862 (0) = 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(58)
where 120572119892(0) 119892 = 1 2 119899119901 are real constants From (58)119909119862(119905) yields119909119862 (119905) = 119875[119890
119869119862119905 00 119890119869119862119905] [1205721 (0) 120572119901 (0) 0 0]
119879 (59)
That is
119909119862 (119905) = 119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]119879
0 ] (60)
8 Mathematical Problems in Engineering
Since 119869119862 is the Jordan block of 119867 corresponding to theeigenvalues of119860+1198611198701 and considering that the pair (119860 119861) iscontrollable it can be concluded that the pair (119860 + 1198611198701 119861) isalso controllable and therefore the right choice of matrix 1198701guarantees that 119909119862(119905) achieves consensus Now 119909119888(119905) is givenby
119909119862 (119905)= 119875[119890119869119862119905 00 119890119869119862119905] [0 0 120572119901+1 (0) 120572119899119901 (0)]
119879 (61)
that yields
119909119862 (119905) = 119875[[0
119890119869119862119905 [120572119901+1 (0) 120572119899119901 (0)]119879]] (62)
And since 119869119862 is the Jordan block of 119867 corresponding tothe eigenvalues of 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 3 119899 thenit can be concluded that for system (28) to achieve consensusmatrices119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 must be Hurwitzwhich implies
lim119905997888rarrinfin119909119862 (119905) = 0 (63)
Considering (60) and (63) the system consensus value isgiven by
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin
119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ]
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1
times (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119890119908119891 (120579 minus 119891120591) 119889120579
(64)
Since it has been shown that lim119905997888rarrinfin119890119908119891(119905) = 0lim119905997888rarrinfin119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579 = 119864(65)
with a real constant vector 119864 thenlim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ] + 119864 (66)
Finally defining
[1205731 (119905) 120573119901 (119905)]119879 = 119890119869119862119905 [1205721 (0) 120572119901 (0)]119879 (67)
and considering that Lemma 4 from [7] proves that the first119901 eigenvectors of119867 are given by 119901119892 = 1119899 otimes 119888119895 for 119892 = 1 119901
1 2 3
456
Figure 1 Communication topology
where 119888119892 are the eigenvectors of 119860 + 1198611198701 and 1119899 isin R119899 is thevector with all of its entries equal to one the consensus value(66) yields
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin1119899
otimes [1198881 119888119901] [1205731 (119905) 120573119901 (119905)]119879 + 119864(68)
Remark 14 It should be noted that the previous proof isbased on the corresponding proof presented in [7] with thedifference that the proof presented in this work includes thepredicted state used in the consensus protocol which resultsin a consensus value affected by the initial injection errorsrepresented by 119864 in (68)
Remark 15 Notice that the prediction-observation schemeproposed here can compensate the time-delay of the agentswhen it is placed either at the input or at the output Inthe case of agents with input time-delay each agent willestimate its own future state and send it to its neighborswhich will use them to calculate its own control thuscompensating their input time-delay In the case where theagents present an output time-delay once again each agentwould estimate its current state from its delayed output andsend the undelayed estimated state to the other agents Inboth cases the consensus will be achieved by means of adecentralized algorithm
6 Numerical Evaluations
Numerical evaluations of the proposed solution carriedout consider two cases the Multiagent Supporting System(MASS) composed by six agents presented in [7] and a mul-tiagent system formed by six agents with unstable dynamicswhose stabilization is achieved in [31] For simplicity inboth cases the communication topology is used depicted inFigure 1 with the corresponding Laplacian matrix given by
L =[[[[[[[[[[[[
1 0 0 0 0 minus1minus1 1 0 0 0 00 minus1 2 minus1 0 00 0 0 1 minus1 00 0 0 minus1 1 0minus1 0 0 0 minus1 2
]]]]]]]]]]]]
(69)
Mathematical Problems in Engineering 9
0 t108642
minus2
0
2
4
6
x11x21x31
x41x51x61
Figure 2 Time evolution of the state MASS system 120591 = 12119904
0 t108642
minus8minus6minus4minus2024
x12x22x32
x42x52x62
Figure 3 Time evolution of the state MASS system 120591 = 12119904
Example 1 In the case of the MASS system the dynamics ofeach agent is given by
119894 (119905) = [[[0 1minus119896119898119894minus119863119898119894]]]119909119894 (119905) + [01] 119906 (119905 minus 120591119894) (70)
where 119909119894(119905) = [119911119894(119905) 119894(119905)]119879 119911119894(119905) is the height of each agent119898119894 is the mass 119863 is the damping at each agent 119896 is thestiffness and 119906119894(119905) is the control input The implementationof the predictor considers a partition of119898 = 4 and the systemparameters 119898119894 = 106 119896 = 120 and 119863 = 505 The initialconditions are set as
1199090 = [minus3 minus15 minus2 minus2 0 1 4 minus1 2 3 6 2]119879 (71)
The gain matrix for the predictor-observer is given byŁ119894 = [1 0 4 0]119879 and the consensus gain vectors 1198701 =[113208 minus02358] and 1198702 = [88687 1] The delay consid-ered is 120591 = 12119904 the results are given in Figures 2 3 4 and 5that represent the evolution in time of the state observationerrors and control signal respectively The evolution of thelogarithm of the homogeneous norm of the prediction erroris depicted in Figure 6 to show its exponential convergence Itcan be seen that with the partition of the predictor-observerlarge delays can be compensated
minus2
0
2
4
6
ew11ew21ew31
ew41ew51ew61
minus8minus6minus4minus2024
ew12ew22ew32
ew42ew52ew62
0 t108642
0 t108642
Figure 4 Time evolution of the estimation errors MASS system120591 = 12119904
minus1
0
1
2
3
4
u1u2u3
u4u5u6
0 t108642
Figure 5 Time evolution of the control signal MASS system 120591 =12119904
Example 2 In a more challenging situation an unstablesystem presented in [31] is taken into account to form amultiagent system with 119899 = 6 and the communicationtopology presented in Figure 1 The dynamics of each agentis given by
(119905) = [minus5 minus63 4 ] 119909 (119905) + [04] 119906 (119905 minus 120591)
119910 (119905) = [minus2 2] 119909 (119905) (72)
10 Mathematical Problems in Engineeringlog((e))
1
0
minus1
minus2
minus3
minus4
minus5
0 t108642
Figure 6 Time evolution of the logarithm of the prediction errorMASS system 120591 = 12119904
0 5 10 t
minus20
minus10
0
10
20
x11x21x31
x41x51x61
0 5 10 tminus20
minus10
0
10
20
x12x22x32
x42x52x62
Figure 7 Time evolution of the state unstable agents 120591 = 1119904
The delay of the system is 120591 = 1119904 the partition of theobserver is119898 = 4 and the initial conditions are set as
1199090 = [minus3 02 minus1 05 3 1 minus15 0 4 minus12 minus2 0]119879 (73)
The gain of each subpredictor is given by119871 119894 = [minus08212 07263]119879 and the control gains are1198701 = [minus05417 minus 075] and 1198702 = [minus4 03] Figures 7and 8 present the evolution in time of the state of the systemand the prediction errors respectively where after a transientperiod the desired convergence is obtained Figure 9 presentsthe evolution of the control signal The logarithm of thenorm of the prediction error is presented in Figure 10
0 5 10 tminus20
minus10
0
10
ew11ew21ew31
ew41ew51ew61
0 5 10 t
minus10
0
10
20
ew12ew22ew32
ew42ew52ew62
Figure 8 Time evolution of the estimation errors unstable agents120591 = 1119904
0 5 10 t
minus6
minus4
minus2
0
2
4
6
u1u2u3
u4u5u6
Figure 9 Time evolution of the control signal unstable agents 120591 =1119904
7 Conclusions
This work deals with the consensus problem for multiagentsystems with LTI dynamics and input time-delay A modifiedpartitioned predictor-observer is proposed to estimate thefuture state values of the agents These predicted states areused in the consensus protocol in order to compensatethe input time-delays Formal proofs for the convergenceof the predictor and consensus are given The performednumerical evaluations show that a larger number of partitions
Mathematical Problems in Engineering 11
0 5 10 t
log((e))
25
2
15
1
05
0
minus05
minus1
Figure 10 Time evolution of the logarithm of the prediction errorunstable agents 120591 = 1119904
in the predictor-observer results in an improvement of theresponse of the system and in a larger time-delay that can becompensated
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] W Ren and E Atkins ldquoDistributed multi-vehicle coordinatedcontrol via local information exchangerdquo International Journal ofRobust and Nonlinear Control vol 17 no 10-11 pp 1002ndash10332007
[2] R Olfati-Saber and R M Murray ldquoDistributed cooperativecontrol ofmultiple vehicle formations using structural potentialfunctionsrdquo IFACWorld Congress 2002
[3] J A Fax and R M Murray ldquoInformation flow and cooperativecontrol of vehicle formationsrdquo IEEE Transactions on AutomaticControl vol 49 no 9 pp 1465ndash1476 2004
[4] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[5] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbour rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[6] L Moreau ldquoConsensus and cooperation in networked multi-agent systemsrdquo IEEE Transactions onAutomatic Control vol 50no 2 pp 169ndash182 2005
[7] J Xi N Cai and Y Zhong ldquoConsensus problems for high-orderlinear time-invariant swarm systemsrdquo Physica A StatisticalMechanics and its Applications vol 389 no 24 pp 5619ndash56272010
[8] W Ren and R W BeardDistributed Consensus in Multi-VehicleCooperative Control Theory and Applications Springer-VerlagLondon UK 2008
[9] L Peng J Yingmin D Junping and Y Shiying ldquoDistributedconsensus protocol for second-order agents with fixed topology
and time-delayrdquo in Proceedings of the 26th Chinese ControlConference (CCC rsquo07) pp 577ndash581 2007
[10] Z Yan D Wu and Y Liu ldquoConsensus of discrete multiagentsystem with various time delays and environmental distur-bancesrdquo Entropy vol 16 no 12 pp 6524ndash6538 2014
[11] D Lee and M W Spong ldquoAgreement with non-uniforminformation delaysrdquo in Proceedings of the American ControlConference IEEE 2006
[12] P Lin and Y Jia ldquoConsensus of a class of second-order multi-agent systems with time-delay and jointly-connected topolo-giesrdquo IEEE Transactions on Automatic Control vol 55 no 3 pp778ndash784 2010
[13] P Lin and Y Jia ldquoConsensus of second-order discrete-timemulti-agent systems with nonuniform time-delays and dynam-ically changing topologiesrdquoAutomatica vol 49 no 5 pp 2154ndash2158 2009
[14] J Xi Z Shi and Y Zhong ldquoConsensus analysis and designfor high-order linear swarm systems with time-varying delaysrdquoPhysicaA StatisticalMechanics and its Applications vol 390 no23-24 pp 4114ndash4123 2011
[15] J Xi Z Wang G Liu and Y Zhong ldquoConsensus problems forlinear time-varying swarm systemswith topology variances andmultiple time delaysrdquo in Proceedings of the 2013 32nd ChineseControl Conference (CCC rsquo13) pp 192ndash198 2013
[16] X Luo X Li S Li and X Guan ldquoConsensus for linear multi-agent systems with constant and time-varying communicationdelays via delay-decomposition approachrdquo in Proceedings of the11th World Congress on Intelligent Control and Automation pp353ndash358 2014
[17] Y Cao T Oguchi P Verhoeckx and H Nijmeijer ldquoConsensuscontrol for a multiagent systemwith time delaysrdquoMathematicalProblems in Engineering vol 2017 Article ID 4063184 11 pages2017
[18] S Mehra and S R Sahoo ldquoTrajectory tracking with input delayinmulti-agent system Double integrator caserdquo in Proceedings ofthe 2016 International Conference onUnmannedAircraft Systems(ICUAS rsquo16) pp 387ndash393 2016
[19] S Mehra A Sen and S R Sahoo ldquoTrajectory tracking inheterogeneous multi-agent system without and with inputdelayrdquo in Proceedings of the 2017 Indian Control Conference (ICCrsquo17) pp 338ndash343 2017
[20] B Zhou and Z Lin ldquoConsensus of high-order multi-agent sys-tems with large input and communication delaysrdquo Automaticavol 50 no 2 pp 452ndash464 2014
[21] C Wang Z Zuo Z Lin and Z Ding ldquoA truncated predictionapproach to consensus control of lipschitz nonlinearmultiagentsystems with input delayrdquo IEEE Transactions on Control ofNetwork Systems vol 4 no 4 pp 716ndash724 2017
[22] P Shi and Q K Shen ldquoObserver-based leader-following con-sensus of uncertain nonlinear multi-agent systemsrdquo Interna-tional Journal of Robust and Nonlinear Control 2017
[23] O J M Smith ldquoCloser control of loops with deadtimerdquoChemical Engineering Progress vol 53 no 5 pp 217ndash219 1957
[24] K Watanabe and M Ito ldquoA process-model control for linearsystems with delayrdquo IEEE Transactions on Automatic Controlvol 26 no 6 pp 1261ndash1269 1981
[25] W Michiels and D Roose ldquoTime-delay compensation inunstable plants using delayed state feedbackrdquo in Proceedings ofthe 40th IEEE Conference on Decision and Control rsquo01 vol 2 pp1433ndash1437 IEEE 2001
12 Mathematical Problems in Engineering
[26] A Manitius and A W Olbrot ldquoFinite spectrum assignmentproblem for systems with delaysrdquo IEEE Transactions on Auto-matic Control vol 24 no 4 pp 541ndash553 1979
[27] Z Artstein ldquoLinear systems with delayed controls a reductionrdquoIEEE Transactions on Automatic Control vol 27 no 4 pp 869ndash879 1982
[28] L Mirkin and N Raskin ldquoEvery stabilizing dead-time con-troller has an observerndashpredictor-based structurerdquo Automaticavol 39 no 10 pp 1747ndash1754 2003
[29] S Mondie and W Michiels ldquoFinite spectrum assignment ofunstable time-delay systems with a safe implementationrdquo IEEETransactions on Automatic Control vol 48 no 12 pp 2207ndash2212 2003
[30] B Zhou ldquoInput delay compensation of linear systems with bothstate and input delays by nested predictionrdquoAutomatica vol 50no 5 pp 1434ndash1443 2014
[31] M Najafi S Hosseinnia F Sheikholeslam and M KarimadinildquoClosed-loop control of dead time systems via sequential sub-predictorsrdquo International Journal of Control vol 86 no 4 pp599ndash609 2013
[32] F Sheikholeslam S Hosseinnia M Najafi and Q WangldquoRobust H infin control of single input-delay systems based onsequential sub-predictorsrdquo IET Control Theory amp Applicationsvol 8 no 13 pp 1175ndash1184 2014
[33] F Cacace F Conte A Germani and G Palombo ldquoOptimalcontrol of linear systems with large and variable input delaysrdquoSystems amp Control Letters vol 89 pp 1ndash7 2016
[34] F Cacace A Germani and C Manes ldquoPredictor-based controlof linear systems with large and variable measurement delaysrdquoInternational Journal of Control vol 87 no 4 pp 704ndash714 2014
[35] F Mazenc and M Malisoff ldquoStabilization and robustness anal-ysis for time-varying systems with time-varying delays usinga sequential subpredictors approachrdquo Automatica vol 82 pp118ndash127 2017
[36] A Germani C Manes and P Pepe ldquoA new approach to stateobservation of nonlinear systems with delayed outputrdquo Instituteof Electrical andElectronics Engineers Transactions onAutomaticControl vol 47 no 1 pp 96ndash101 2002
[37] M Velasco-Villa J Heras-Godınez J A Vazquez-Santacruzand V Fragoso-Rubio ldquoDelayed consensus problem for singleand double integrator systemsrdquo Mathematical Problems inEngineering vol 2015 Article ID 461098 15 pages 2015
[38] V Fragoso-Rubio M Velasco-Villa and M A Hernandez-Perez ldquoConsensus problem for linear time invariant systemswith time-delayrdquo in Proceedings of the National Conference ofAutomatic Control rsquo17 pp 90ndash95 2017
[39] C Godsil and G Royle Algebraic Graph Theory Springer NewYork NY USA 2001
[40] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[41] W Michiels K Engelborghs P Vansevenant and D RooseldquoContinuous pole placement for delay equationsrdquo Automaticavol 38 no 5 pp 747ndash761 2002
[42] K Gu V L Kharitonov and J Chen Stability of Time-DelaySystems Birkhauser 2003
[43] R E Bellman and K L Cooke Differential-Difference Equa-tions Rand Corporation 1963
[44] I Estrada-Sanchez M Velasco-Villa and H Rodrıguez-CortesldquoPrediction-based control for nonlinear systems with inputdelayrdquoMathematical Problems in Engineering vol 2017 ArticleID 7415418 11 pages 2017
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 3
the elements of a row equals zero There also existsan eigenvector 1119899 = [1 1]119879 with 119899times1 dimensionscorresponding to the zero eigenvalue
(iv) All of the eigenvalues 120582119871119894 of L different from zeroare positive (for directed graphs) or have positive realparts (for undirected graphs) Therefore the real partof every eigenvalue of minusL is negative
3 Problem Statement
Thiswork deals with the consensus problem for a set of agentswith input time-delayThe dynamics of the agents is modeledas linear time-invariant systems with input time-delay andfixed communication topology The graph that models thecommunication is considered to be either directed with aspanning tree or undirected and connected which impliesthat one of the eigenvalues of the Laplacianmatrix equals zero[40]
Each agent is considered to be a 119901-dimensional Multiple-Input-Multiple-Output (MIMO) linear system with the sameinput time-delay and dynamics given by
119894 (119905) = 119860 119894119909119894 (119905) + 119861119894119906119894 (119905 minus 120591119894)119910119894 (119905) = 119862119894119909119894 (119905) (1)
for 119894 = 1 2 119899 where 119909119894 = [1199091198941 119909119894119901]119879 isin R119901 representsthe state of the 119894-th agent 119906119894 isin R119902 is the input control 120591119894 gt 0is a known constant input time-delay 119910119894 isin R119903 is the outputsignal and 119860 119894 isin R119901times119901 119861119894 isin R119901times119902 and 119862119894 isin R119903times119901 It isimportant to note that every parameter is associated with the119894-th agent
Consensus Problem A system of 119899 agents is said to achieveconsensus if for any initial condition 119909119894(0) 119909119894(119905) 997888rarr 119909119895(119905) as119905 997888rarr infin for all 119894 119895 = 1 119899 [1]
To solve the consensus problem for multiagent systems aprotocol is presented in [7] for agents without communica-tion delay with dynamics given by
119894 (119905) = 119860 119894119909119894 (119905) + 119861119894119906119894 (119905) (2)
The consensus protocol is given by
119906119894 (119905) = 1198701119909119894 (119905) + 1198702Σ119899119895=1119886119894119895 (119909119895 (119905) minus 119909119894 (119905)) (3)
for 119894 119895 = 1 119899 where 119886119894119895 are the elements of the adjacentmatrix and1198701 and1198702 are constant gainmatricesThe authorspresent necessary and sufficient conditions for consensus andconsensualization
4 Predictor-Observer Scheme
To compensate the time-delay present in the dynamics ofthe agents a predictor-observer scheme is proposed Theobjective is to estimate the future state of the agents 120591119894 unitsof time ahead to later design a consensus scheme basedon the predicted state It is important to note that the use
of predicted future states on time-delayed systems avoidsthe numerical implementation problems present in solutionswith infinite spectrum even more the partitioned nature ofthe scheme proposed by this work allows compensating largetime-delaysThe design of the predictionndashobserver scheme isdone under the following assumptions
Assumption 1 Signals 119910(119905) and 119906(119905) are available formeasure-ment
Assumption 2 For system (1) the pair (119860 119894 119861119894) is controllableand (119860 119894 119862119894) is observableAssumption 3 Consider that for the time delay 120591119894 in (2) thereexists an integer119898119894 gt 0 such that 120591119894 = 120591119894119898119894Remark 4 Notice that Assumption 3 is just a technicalrequirement in order to avoid the consideration of irrationalvalues for the timendashdelay 120591119894 that could yield an approximateprediction
For the 119894-th agent a set of advanced variables can bedefined as
1199081198941 (119905) = 119909119894 (119905 + 120591119894)1199081198942 (119905) = 1199081198941 (119905 + 120591119894) = 119909119894 (119905 + 2120591119894)
119908119894119898 (119905) = 119908119894119898minus1 (119905 + 120591119894) = 119909119894 (119905 + 119898120591119894) = 119909119894 (119905 + 120591119894)
(4)
where 119908119894119891 = [1199081198941119891 1199081198942119891 119908119894119901119891]119879 for 119891 = 1 119898 refers tothe 119901-dimensional vector state Taking the time derivative of(4) it is obtained that
119894119891 = 119860 119894119908119894119891 + 119861119894119906 (119905 minus (119898 minus 119891) 120591119894) (5)
for 119891 = 1 119898 In particular for 119891 = 119898119894119898 = 119860 119894119908119894119898 + 119861119894119906 (119905) (6)
and a free-delay dynamic is obtainedNotice that system (6) represents the evolution of system
(1) forecasted 120591119894 units of time without input-delayFor system (6) the following predictor-observer is pro-
posed
119908119894119891 = 119860 119894119908119894119891 + 119861119894119906119894 (119905 minus (119898 minus 119891) 120591119894) + 119871 119894119862119894119890119908119894119891 (119905 minus 120591119894) (7)
for 119891 = 1 119898 where 119871 119894 isin R119901times119903 is a gain matrix and theerror signal
119890119908119894119891 (119905) = [1198901199081198941119891 (119905) 119890119908119894119901119891 (119905)]119879 (8)
takes the form
1198901199081198941 (119905) = 119909119894 (119905 + 120591119894) minus 1199081198941 (119905) 119890119908119894119891 (119905) = 119908119894119891minus1 (119905 + 120591119894) minus 119908119894119891 (119905) for 119891 = 2 3 119898 (9)
4 Mathematical Problems in Engineering
The error dynamics (9) is given by
1198901199081198941 (119905) = 119894 (119905 + 120591119894) minus 1199081198941 (119905) 119890119908119894119891 (119905) = 119908119894119891minus1 (119905 + 120591119894) minus 119908119894119891 (119905)
for 119891 = 2 3 119898(10)
resulting in
1198901199081198941 (119905) = 119860 1198941198901199081198941 (119905) minus 119871 1198941198621198941198901199081198941 (119905 minus 120591119894) 119890119908119894119891 (119905) = 119860 119894119890119908119894119891 (119905) + 119871 119894119862119894119890119908119894119891minus1 (119905)
minus 119871 119894119862119894119890119908119894119891 (119905 minus 120591119894) (11)
with 119891 = 2 3 119898 The vectorial form of (11) is the time-delay error system given by
119890119908119894 (119905) = 119860lowast0119890119908119894 (119905) + 119860lowast1119890119908119894 (119905 minus 120591119894) (12)
with 119890119908119894 = [1198901199081198941 119890119908119894119898]119879 for 119894 = 1 119899 and
119860lowast0 =[[[[[[[
119860 119894 0 sdot sdot sdot 0 0119871 119894119862119894 119860 119894 sdot sdot sdot 0 0 d
0 0 sdot sdot sdot 119871 119894119862119894 119860 119894
]]]]]]]
119860lowast1 = [[[[[
minus119871 119894119862119894 sdot sdot sdot 0 d
0 sdot sdot sdot minus119871 119894119862119894
]]]]]
(13)
where 0 isin R119901times119901 is a matrix with all inputs equal to zero
41 Related Predictor Scheme The predictor given by (7) isequivalent to the sequential subpredictors strategy proposedby [31] that is recalled in the following
Consider system (1) and assume that all the state 119909(119905) isavailable for measurement this is 119862119894 = 119868
(119905) = 119860119909 (119905) + 119861119906 (119905 minus 120591) (14)
and there exists119898 isinZ+ such that
120591 = 120591119898 (15)
which allows proposing the sequence of subpredictors givenby
1 (119905) = 1198601199091 (119905) + 1198711 (1199091 (119905 minus 120591) minus 1199092 (119905)) + 119861119906 (119905)
119894 (119905) = 119860119909119894 (119905) + 119871 119894 (119909119894 (119905 minus 120591) minus 119909119894+1 (119905))+ 119861119906 (119905 minus (119894 minus 1) 120591)
119898 (119905) = 119860119909119898 (119905) + 119871119898 (119909119898 (119905 minus 120591) minus 119909119898+1 (119905))+ 119861119906 (119905 minus (119898 minus 1) 120591)
(16)
with 119909119894 isin R119899 119894 = 1 119898 The prediction errors for eachsubpredictor are defined as
119890119894 (119905) = 119909119894 (119905 minus (119898 minus 119894 minus 1) 120591) minus 119909119894+1 (119905 minus (119898 minus 1) 120591)119890119898 (119905) = 119909119898 (119905 minus 120591) minus 119909 (119905) (17)
for 119894 = 1 119898 minus 1 and the error dynamics given by
119890119894 (119905) = 119860119890119894 (119905) + 119871 119894119890119894 (119905 minus 120591) minus 119871 119894+1119890119894+1 (119905 minus 120591)119890119898 (119905) = 119860119890119898 (119905) + 119871119898119890119898 (119905 minus 120591) (18)
for 119894 = 1 119898 minus 1 Asymptotic convergence for the errordynamics is guaranteed by means of an LMI method thatconsiders the closed-loop system that allows calculating thesubpredictors and controlling gain matrices
Themain difference between both schemes is that authorsin [31] consider systems where it is possible to read the wholestate and the predictor-observer (7) presented here includesthe cases when only a partial measurement is available Therelation between both schemes can be found considering thefollowing coordinate change
1199081 (119905) = 119909119898 (119905)
119908119898 (119905) = 1199091 (119905) (19)
and for the error signals
119890119908119894 (119905) = minus119890119898+1minus119894 (119905 + (119898 + 1 minus 119894) 120591) (20)
for 119894 = 1 119898 to subpredictors (16) and prediction errors(17) and assuming 119862 = 119868 in system (1) results in the chain ofpredictors (7) and error signals (12)
Remark 5 It is important to note that the predictor (16)cannot be used to estimate the future state of system (1) when119862119894 = 11986842 Convergence Analysis of the Predictor-Observer Theconvergence to zero of the injection errors (9) is assured byshowing the stability of the error dynamics (12)
Mathematical Problems in Engineering 5
Lemma 6 Let the predictor-observer (7) satisfy Assumptions1 2 and 3 Suppose that there exist positive gain matrices 119871 119894 for119894 = 1 2 119899 such that the matrix (119860 119894minus119871 119894119862119894) is Hurwitz thenthere exists a sufficiently large119898119894 such that the error signals (9)exponentially converge to zero
Proof The characteristic equation of (12) is given by
119901 (119904) = det (119904119868119898119901 minus 119860lowast0 minus 119860lowast1119890minus119904120591119894) = 0 (21)
It is possible to show that (21) can be rewritten as
119901 (119904) = 119898prod119891=1
(119868119899119904 minus 119860 119894 + 119871 119894119862119894119890minus119904120591119894) = 0 (22)
It is clear that every factor of (22) represents the Laplacetransform of a system of the form
119890119908119894119891 (119905) = 119860 119894119890119908119894119891 (119905) minus 119871 119894119862119894119890119908119894119891 (119905 minus 120591119894) (23)
Since the parameters of 119871 119894 are free from the observabilityassumption of the pair (119860 119894 119862119894) it is always possible to locatethe eigenvalues of the matrix 119860 119894 minus 119871 119894119862119894 in the left halfcomplex plane The Hurwitz property of matrix 119860 119894 minus 119871 119894119862119894assures the stability of the differential difference equation(23) for a sufficiently small time delay 120591119894 [41] The maximumtime delay 120591lowast119894 for which system (23) will be asymptoticallystable depends on the choice of the observer gain 119871 119894 and itscomputation is not an easy task since its complexity rises asthe dimension of the system increases Thus given a gain119871 119894 such that 119860 119894 minus 119871 119894119862119894 is a Hurwitz matrix it is alwayspossible to asymptotically stabilize the prediction error (23)for a constant time delay 120591119894 lt 120591lowast119894 This fact can be verifiedfor instance by considering [42] or by reviewing the poleassignment procedure given in [41] Based on the abovearguments it will be assumed without loss of generality thatthere exist 119871 119894 and 120591lowast119894 such that system (23) is asymptoticallystable for 0 le 120591119894 lt 120591lowast119894 It should also be noticed that thestability of (23) is not only asymptotic but also exponential[43] Furthermore if matrix 119871 119894 is chosen according to the rulegiven inTheorem 31 in [34] this is
119871 = 119890119860119900120591lowast (24)
with
119860119900 = 119860 minus 119871119862 (25)
where 119871 is such that all the real parts of the eigenvalues of 119860119900are smaller than some negative real constant 120572 it is possibleto guarantee the exponential convergence of the predictionerrors 119890119908119894119891(119905) to zero which results in the convergence of theestimated future state 119908119894119898(119905) to the real future value 119909(119905 + 120591119894)Remark 7 It should be pointed out that a predictor of theform (23) with 119898 = 1 designed for a system with timedelay at the output was considered in [25] also for the case119898 = 1 in [44] a predictor for a nonlinear input delay systemis designed As mentioned before the partitioned predictorpresented in [31] is similar to the one presented in this sectionconsidering 119862 = 119868
Remark 8 Notice that in the case of 120591119894 = 0 the errordynamics (23) takes the form
119890119908119894119891 (119905) = (119860 119894 minus 119871 119894119862119894) 119890119908119894119891 (119905) (26)
where the stability is determined by the eigenvalues of thematrix 119860 119894 minus 119871 119894119862119894 that by the observability assumption canalways be stabilizable
Remark 9 It should be noticed that 120591119894 is given by 120591119894 =119898120591119894 therefore the larger number of subdelays considered byscheme (7) is the larger delay 120591119894 can be compensated withthe drawback of an increasing dimension of the proposedpredictor-observer
The following result allows obtaining the estimated values119909119894(119905 + 119891120591119894) from the future real values 119909119894(119905 + 119891120591119894) in (4)
Lemma 10 Suppose for system (1) that Assumptions 1 2 and3 are satisfied For every 120591119894 gt 0 there always exists a predictor-observer (7) such that the estimated states 119908119894119891(119905) exponentiallyconverge to the future values 119909119894(119905 + 119891120591119894) for 119891 = 1 119898Proof From the definition of error (9) it is possible to showthat
119908119894119891 (119905) = 119909 (119905 + 119891120591119894) minus119891sum119896=1
119890119908119894119896 (119905 + (119891 minus 119896) 120591119894) (27)
for 119896 = 1 119891 Then by Lemma 6 it is possible to concludethat the estimated states 119908119894119891(119905) exponentially converge to thecorresponding real values
Remark 11 Note that if119898 997888rarr infin then 120591119894 997888rarr 0 relaxing theconvergence conditions of the estimation error This impliesthat it is always possible to stabilize system (12) choosing theinteger119898 large enough
5 Consensus Problem
In this section the consensus protocol for LTI systemsin time-delay is presented The set of agents has a fixedcommunication topology that contains a directed spanningtreeThe dynamics of each agent is given by (1)This protocolconsiders the solution presented in [7] that is adapted to beused with the future state values estimated in the previoussection By using the predicted states instead of the currentone it is possible to deal with systems with large time-delays
Consider a set of 119899 agents of the form (1) where for thesake of easy of presentation it is assumed that 120591119894 = 120591 for 119894 =1 119899 that is
119894 (119905) = 119860119909119894 (119905) + 119861119906119894 (119905 minus 120591) (28)
The vectorial form of the complete set of agents is givenby
(119905) = (119868119899 otimes 119860) 119909 (119905) + (119868119899 otimes 119861) 119906 (119905 minus 120591) (29)
where 119909 = [1199091 1199092 119909119899]119879 119906 = [1199061 1199062 119906119899]119879 and 119868119899 isinR119899times119899
6 Mathematical Problems in Engineering
The following control scheme based on the predictor-observer (7) is proposed
119906119894 (119905) = 1198701119908119894119898 (119905) + 1198702 119899sum119895=1
119897119894119895 (119908119895119898 (119905) minus 119908119894119898 (119905)) (30)
for 119894 119895 = 1 2 119899 1198701 1198702 isin R119902times119901 where 119897119894119895 are theentries of the Laplacian matrix of the graph The controlscheme (30) can be rewritten as
119906 (119905) = (119868119899 otimes 1198701 minusL otimes 1198702) 119908119898 (119905) (31)
whereL isin R119899times119899 is the Laplacian of the system and119908119898 =[1199081119898 119908119899119898]119879 is the predicted stateThe closed-loop system (29)ndash(31) is given by
(119905) = (119868119899 otimes 119860) 119909 (119905)+ (119868119899 otimes 119861) (119868119899 otimes 1198701 minusL otimes 1198702) 119908119898 (119905 minus 120591) (32)
Considering that (119860otimes119861)(119862otimes119863) = 119860119862otimes119861119863 it is obtainedthat
(119905) = (119868119899 otimes 119860) 119909 (119905)+ (119868119899 otimes 1198611198701 minusL otimes 1198611198702) 119908119898 (119905 minus 120591) (33)
Recalling the observation errors
1198901199081 (119905) = 119909 (119905 + 120591) minus 1199081 (119905) 119890119908119891 (119905) = 119908119891minus1 (119905 + 120591) minus 119908119891 (119905) for 119891 = 2 3 119898 (34)
the estimated state119908119898(119905minus120591) can be rewritten as a function ofthe real state and the observation errors
119908119898 (119905 minus 120591) = 119909 (119905) minus 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (35)
where 119890119908119891 = [1198901199081119891 119890119908119899119891]119879 producing (119905) = 119867119909 (119905)
+ (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (36)
where119867 = (119868119899 otimes (119860 + 1198611198701) minusL otimes 1198611198702)Consider now a nonsingular matrix 119880 isin R119899times119899 such that
119880minus1L119880 = 119869L (37)
for 119869L isin R119899times119899 representing the Jordan canonical form of theLaplacian matrixL
Considering now the globally invertible change of vari-able
119909 = (119880minus1 otimes 119868119902) 119909 119909 = (119880 otimes 119868119902) 119909 (38)
for 119909 = [1199091 1199092 119909119899]119879 then it is possible to show that
(119880 otimes 119868119902) (119905)= [119868119899 otimes (119860 + 1198611198701)] (119880 otimes 119868119902) 119909 (119905)minus (L otimes 1198611198702) (119880 otimes 119868119902) 119909 (119905)+ [L otimes 1198611198702 minus 119868119899 otimes 1198611198701] 119898sum
119891=1
119890119908119891 (119905 minus 119891120591)(39)
from where
(119905)= [119868119899 otimes (119860 + 1198611198701) minus 119869119871 otimes 1198611198702] 119909 (119905)+ [119880minus1L otimes 1198611198702 minus 119880minus1 otimes 1198611198701] 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (40)
Equation (40) can be rewritten as
(119905) = Γ119909 (119905) + Δ 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (41)
where
Δ = 119880minus1L otimes 1198611198702 minus 119880minus1 otimes 1198611198701 (42)
Γ =[[[[[[[[[[
119860 + 1198611198701 0 0 sdot sdot sdot 00 1205742 1205751198611198702 sdot sdot sdot 0 d d
0 0 sdot sdot sdot 120574119899minus1 12057511986111987020 0 sdot sdot sdot 0 120574119899
]]]]]]]]]]
(43)
with 120574119894 = 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 119899 and 120575 = 0 or120575 = 1 depending on the structure of 119869119871Remark 12 Notice that since 119867 and Γ are similar matricesthey have the same eigenvalues Furthermore in (43) it can beseen that those eigenvalues correspond to the ones of119860+1198611198701and 119860 + 1198611198701 minus 1205821198941198611198702 for 119894 = 2 3 11989951 Consensus Analysis
Lemma 13 Consider a set of 119899 agents of the form (28)with a communication topology with a directed spanning treeUnder these circumstances solution to the consensus problemis achieved if and only if the matrices 119860 + 1198611198701 minus 1205821198711198941198611198702 for119894 = 2 3 119899 are HurwitzProof Let the invertible matrix 119875 = [1199011 1199012 119901119899119901] isinC119899119901times119899119901 be such that
119875minus1119867119875 = 119869119867 (44)
Mathematical Problems in Engineering 7
with 119869119867 being the Jordan canonical formof119867 defined in (36)Considering the change of coordinates
119909 = 119875minus1119909 119909 = 119875119909 (45)
(36) yields
119909 = 119875minus1119867119875119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (46)
That is119909 = 119869119867119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (47)
The solution to system (47) is given by
119909 (119905) = 119890119869119867119905119909 (0)+ 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(48)
Since 119909 = 119875minus1119909 it is possible to write119909 (119905) = 119875119890119869119867119905119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(49)
Let 119867 isin R119899119901times119899119901 with eigenvectors 119901119892 isin C (119892 =1 2 119899119901) Note from Remark 12 that 119901119892 (119892 = 1 2 119899)correspond to the eigenvalues of119860+1198611198701 while eigenvectors119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) correspond to the eigenvalues of119860 + 1198611198701 minus 1205821198711198941198611198702 119894 = 2 3 119899 Then two consensus sub-spaces can be established subspaceC(119867) spanned by119901119892 (119892 =1 2 119899) and a complementary consensus subspace C(119867)spanned by 119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) Therefore theconsensus spaceC119899119901 is given by
C119899119901 = C oplusC (50)
Since the eigenvalues of119867 correspond to the eigenvaluesof119860+1198611198701 and119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 matrix 119890119869119867119905can be written as
119890119869119867119905 = [119890119869119862119905 00 119890119869119862119905] (51)
defining
119909 (0) = 119909119862 (0) + 119909119862 (0) (52)
Equation (49) can now be rewritten as
119909 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579
(53)
Considering that the solution of the closed-loop system(53) can be expressed as
119909 (119905) = 119909119862 (119905) + 119909119862 (119905)+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(54)
and noting that the limit when 119905 997888rarr infin of the third term in(54) is a constant value thus
lim119905997888rarrinfin119890119908119891 (119905) = 0 (55)
The system consensus state can be established by meansof the analysis of 119909119862(119905) and 119909119862(119905) From (53) and (54) 119909119862(119905)is given by
119909119862 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909119862 (0) (56)
Describing the initial state as
119909 (0) = 119909119862 (0) + 119909119862 (0)= 119901sum119892=1
120572119892 (0) 119901119892 +119899119901sum119892=119901+1
120572119892 (0) 119901119892= 119875 [1205721 (0) 120572119901 (0) 0 0]119879+ 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(57)
thus
119909119862 (0) = 119875 [1205721 (0) 120572119901 (0) 0 0]119879119909119862 (0) = 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(58)
where 120572119892(0) 119892 = 1 2 119899119901 are real constants From (58)119909119862(119905) yields119909119862 (119905) = 119875[119890
119869119862119905 00 119890119869119862119905] [1205721 (0) 120572119901 (0) 0 0]
119879 (59)
That is
119909119862 (119905) = 119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]119879
0 ] (60)
8 Mathematical Problems in Engineering
Since 119869119862 is the Jordan block of 119867 corresponding to theeigenvalues of119860+1198611198701 and considering that the pair (119860 119861) iscontrollable it can be concluded that the pair (119860 + 1198611198701 119861) isalso controllable and therefore the right choice of matrix 1198701guarantees that 119909119862(119905) achieves consensus Now 119909119888(119905) is givenby
119909119862 (119905)= 119875[119890119869119862119905 00 119890119869119862119905] [0 0 120572119901+1 (0) 120572119899119901 (0)]
119879 (61)
that yields
119909119862 (119905) = 119875[[0
119890119869119862119905 [120572119901+1 (0) 120572119899119901 (0)]119879]] (62)
And since 119869119862 is the Jordan block of 119867 corresponding tothe eigenvalues of 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 3 119899 thenit can be concluded that for system (28) to achieve consensusmatrices119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 must be Hurwitzwhich implies
lim119905997888rarrinfin119909119862 (119905) = 0 (63)
Considering (60) and (63) the system consensus value isgiven by
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin
119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ]
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1
times (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119890119908119891 (120579 minus 119891120591) 119889120579
(64)
Since it has been shown that lim119905997888rarrinfin119890119908119891(119905) = 0lim119905997888rarrinfin119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579 = 119864(65)
with a real constant vector 119864 thenlim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ] + 119864 (66)
Finally defining
[1205731 (119905) 120573119901 (119905)]119879 = 119890119869119862119905 [1205721 (0) 120572119901 (0)]119879 (67)
and considering that Lemma 4 from [7] proves that the first119901 eigenvectors of119867 are given by 119901119892 = 1119899 otimes 119888119895 for 119892 = 1 119901
1 2 3
456
Figure 1 Communication topology
where 119888119892 are the eigenvectors of 119860 + 1198611198701 and 1119899 isin R119899 is thevector with all of its entries equal to one the consensus value(66) yields
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin1119899
otimes [1198881 119888119901] [1205731 (119905) 120573119901 (119905)]119879 + 119864(68)
Remark 14 It should be noted that the previous proof isbased on the corresponding proof presented in [7] with thedifference that the proof presented in this work includes thepredicted state used in the consensus protocol which resultsin a consensus value affected by the initial injection errorsrepresented by 119864 in (68)
Remark 15 Notice that the prediction-observation schemeproposed here can compensate the time-delay of the agentswhen it is placed either at the input or at the output Inthe case of agents with input time-delay each agent willestimate its own future state and send it to its neighborswhich will use them to calculate its own control thuscompensating their input time-delay In the case where theagents present an output time-delay once again each agentwould estimate its current state from its delayed output andsend the undelayed estimated state to the other agents Inboth cases the consensus will be achieved by means of adecentralized algorithm
6 Numerical Evaluations
Numerical evaluations of the proposed solution carriedout consider two cases the Multiagent Supporting System(MASS) composed by six agents presented in [7] and a mul-tiagent system formed by six agents with unstable dynamicswhose stabilization is achieved in [31] For simplicity inboth cases the communication topology is used depicted inFigure 1 with the corresponding Laplacian matrix given by
L =[[[[[[[[[[[[
1 0 0 0 0 minus1minus1 1 0 0 0 00 minus1 2 minus1 0 00 0 0 1 minus1 00 0 0 minus1 1 0minus1 0 0 0 minus1 2
]]]]]]]]]]]]
(69)
Mathematical Problems in Engineering 9
0 t108642
minus2
0
2
4
6
x11x21x31
x41x51x61
Figure 2 Time evolution of the state MASS system 120591 = 12119904
0 t108642
minus8minus6minus4minus2024
x12x22x32
x42x52x62
Figure 3 Time evolution of the state MASS system 120591 = 12119904
Example 1 In the case of the MASS system the dynamics ofeach agent is given by
119894 (119905) = [[[0 1minus119896119898119894minus119863119898119894]]]119909119894 (119905) + [01] 119906 (119905 minus 120591119894) (70)
where 119909119894(119905) = [119911119894(119905) 119894(119905)]119879 119911119894(119905) is the height of each agent119898119894 is the mass 119863 is the damping at each agent 119896 is thestiffness and 119906119894(119905) is the control input The implementationof the predictor considers a partition of119898 = 4 and the systemparameters 119898119894 = 106 119896 = 120 and 119863 = 505 The initialconditions are set as
1199090 = [minus3 minus15 minus2 minus2 0 1 4 minus1 2 3 6 2]119879 (71)
The gain matrix for the predictor-observer is given byŁ119894 = [1 0 4 0]119879 and the consensus gain vectors 1198701 =[113208 minus02358] and 1198702 = [88687 1] The delay consid-ered is 120591 = 12119904 the results are given in Figures 2 3 4 and 5that represent the evolution in time of the state observationerrors and control signal respectively The evolution of thelogarithm of the homogeneous norm of the prediction erroris depicted in Figure 6 to show its exponential convergence Itcan be seen that with the partition of the predictor-observerlarge delays can be compensated
minus2
0
2
4
6
ew11ew21ew31
ew41ew51ew61
minus8minus6minus4minus2024
ew12ew22ew32
ew42ew52ew62
0 t108642
0 t108642
Figure 4 Time evolution of the estimation errors MASS system120591 = 12119904
minus1
0
1
2
3
4
u1u2u3
u4u5u6
0 t108642
Figure 5 Time evolution of the control signal MASS system 120591 =12119904
Example 2 In a more challenging situation an unstablesystem presented in [31] is taken into account to form amultiagent system with 119899 = 6 and the communicationtopology presented in Figure 1 The dynamics of each agentis given by
(119905) = [minus5 minus63 4 ] 119909 (119905) + [04] 119906 (119905 minus 120591)
119910 (119905) = [minus2 2] 119909 (119905) (72)
10 Mathematical Problems in Engineeringlog((e))
1
0
minus1
minus2
minus3
minus4
minus5
0 t108642
Figure 6 Time evolution of the logarithm of the prediction errorMASS system 120591 = 12119904
0 5 10 t
minus20
minus10
0
10
20
x11x21x31
x41x51x61
0 5 10 tminus20
minus10
0
10
20
x12x22x32
x42x52x62
Figure 7 Time evolution of the state unstable agents 120591 = 1119904
The delay of the system is 120591 = 1119904 the partition of theobserver is119898 = 4 and the initial conditions are set as
1199090 = [minus3 02 minus1 05 3 1 minus15 0 4 minus12 minus2 0]119879 (73)
The gain of each subpredictor is given by119871 119894 = [minus08212 07263]119879 and the control gains are1198701 = [minus05417 minus 075] and 1198702 = [minus4 03] Figures 7and 8 present the evolution in time of the state of the systemand the prediction errors respectively where after a transientperiod the desired convergence is obtained Figure 9 presentsthe evolution of the control signal The logarithm of thenorm of the prediction error is presented in Figure 10
0 5 10 tminus20
minus10
0
10
ew11ew21ew31
ew41ew51ew61
0 5 10 t
minus10
0
10
20
ew12ew22ew32
ew42ew52ew62
Figure 8 Time evolution of the estimation errors unstable agents120591 = 1119904
0 5 10 t
minus6
minus4
minus2
0
2
4
6
u1u2u3
u4u5u6
Figure 9 Time evolution of the control signal unstable agents 120591 =1119904
7 Conclusions
This work deals with the consensus problem for multiagentsystems with LTI dynamics and input time-delay A modifiedpartitioned predictor-observer is proposed to estimate thefuture state values of the agents These predicted states areused in the consensus protocol in order to compensatethe input time-delays Formal proofs for the convergenceof the predictor and consensus are given The performednumerical evaluations show that a larger number of partitions
Mathematical Problems in Engineering 11
0 5 10 t
log((e))
25
2
15
1
05
0
minus05
minus1
Figure 10 Time evolution of the logarithm of the prediction errorunstable agents 120591 = 1119904
in the predictor-observer results in an improvement of theresponse of the system and in a larger time-delay that can becompensated
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] W Ren and E Atkins ldquoDistributed multi-vehicle coordinatedcontrol via local information exchangerdquo International Journal ofRobust and Nonlinear Control vol 17 no 10-11 pp 1002ndash10332007
[2] R Olfati-Saber and R M Murray ldquoDistributed cooperativecontrol ofmultiple vehicle formations using structural potentialfunctionsrdquo IFACWorld Congress 2002
[3] J A Fax and R M Murray ldquoInformation flow and cooperativecontrol of vehicle formationsrdquo IEEE Transactions on AutomaticControl vol 49 no 9 pp 1465ndash1476 2004
[4] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[5] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbour rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[6] L Moreau ldquoConsensus and cooperation in networked multi-agent systemsrdquo IEEE Transactions onAutomatic Control vol 50no 2 pp 169ndash182 2005
[7] J Xi N Cai and Y Zhong ldquoConsensus problems for high-orderlinear time-invariant swarm systemsrdquo Physica A StatisticalMechanics and its Applications vol 389 no 24 pp 5619ndash56272010
[8] W Ren and R W BeardDistributed Consensus in Multi-VehicleCooperative Control Theory and Applications Springer-VerlagLondon UK 2008
[9] L Peng J Yingmin D Junping and Y Shiying ldquoDistributedconsensus protocol for second-order agents with fixed topology
and time-delayrdquo in Proceedings of the 26th Chinese ControlConference (CCC rsquo07) pp 577ndash581 2007
[10] Z Yan D Wu and Y Liu ldquoConsensus of discrete multiagentsystem with various time delays and environmental distur-bancesrdquo Entropy vol 16 no 12 pp 6524ndash6538 2014
[11] D Lee and M W Spong ldquoAgreement with non-uniforminformation delaysrdquo in Proceedings of the American ControlConference IEEE 2006
[12] P Lin and Y Jia ldquoConsensus of a class of second-order multi-agent systems with time-delay and jointly-connected topolo-giesrdquo IEEE Transactions on Automatic Control vol 55 no 3 pp778ndash784 2010
[13] P Lin and Y Jia ldquoConsensus of second-order discrete-timemulti-agent systems with nonuniform time-delays and dynam-ically changing topologiesrdquoAutomatica vol 49 no 5 pp 2154ndash2158 2009
[14] J Xi Z Shi and Y Zhong ldquoConsensus analysis and designfor high-order linear swarm systems with time-varying delaysrdquoPhysicaA StatisticalMechanics and its Applications vol 390 no23-24 pp 4114ndash4123 2011
[15] J Xi Z Wang G Liu and Y Zhong ldquoConsensus problems forlinear time-varying swarm systemswith topology variances andmultiple time delaysrdquo in Proceedings of the 2013 32nd ChineseControl Conference (CCC rsquo13) pp 192ndash198 2013
[16] X Luo X Li S Li and X Guan ldquoConsensus for linear multi-agent systems with constant and time-varying communicationdelays via delay-decomposition approachrdquo in Proceedings of the11th World Congress on Intelligent Control and Automation pp353ndash358 2014
[17] Y Cao T Oguchi P Verhoeckx and H Nijmeijer ldquoConsensuscontrol for a multiagent systemwith time delaysrdquoMathematicalProblems in Engineering vol 2017 Article ID 4063184 11 pages2017
[18] S Mehra and S R Sahoo ldquoTrajectory tracking with input delayinmulti-agent system Double integrator caserdquo in Proceedings ofthe 2016 International Conference onUnmannedAircraft Systems(ICUAS rsquo16) pp 387ndash393 2016
[19] S Mehra A Sen and S R Sahoo ldquoTrajectory tracking inheterogeneous multi-agent system without and with inputdelayrdquo in Proceedings of the 2017 Indian Control Conference (ICCrsquo17) pp 338ndash343 2017
[20] B Zhou and Z Lin ldquoConsensus of high-order multi-agent sys-tems with large input and communication delaysrdquo Automaticavol 50 no 2 pp 452ndash464 2014
[21] C Wang Z Zuo Z Lin and Z Ding ldquoA truncated predictionapproach to consensus control of lipschitz nonlinearmultiagentsystems with input delayrdquo IEEE Transactions on Control ofNetwork Systems vol 4 no 4 pp 716ndash724 2017
[22] P Shi and Q K Shen ldquoObserver-based leader-following con-sensus of uncertain nonlinear multi-agent systemsrdquo Interna-tional Journal of Robust and Nonlinear Control 2017
[23] O J M Smith ldquoCloser control of loops with deadtimerdquoChemical Engineering Progress vol 53 no 5 pp 217ndash219 1957
[24] K Watanabe and M Ito ldquoA process-model control for linearsystems with delayrdquo IEEE Transactions on Automatic Controlvol 26 no 6 pp 1261ndash1269 1981
[25] W Michiels and D Roose ldquoTime-delay compensation inunstable plants using delayed state feedbackrdquo in Proceedings ofthe 40th IEEE Conference on Decision and Control rsquo01 vol 2 pp1433ndash1437 IEEE 2001
12 Mathematical Problems in Engineering
[26] A Manitius and A W Olbrot ldquoFinite spectrum assignmentproblem for systems with delaysrdquo IEEE Transactions on Auto-matic Control vol 24 no 4 pp 541ndash553 1979
[27] Z Artstein ldquoLinear systems with delayed controls a reductionrdquoIEEE Transactions on Automatic Control vol 27 no 4 pp 869ndash879 1982
[28] L Mirkin and N Raskin ldquoEvery stabilizing dead-time con-troller has an observerndashpredictor-based structurerdquo Automaticavol 39 no 10 pp 1747ndash1754 2003
[29] S Mondie and W Michiels ldquoFinite spectrum assignment ofunstable time-delay systems with a safe implementationrdquo IEEETransactions on Automatic Control vol 48 no 12 pp 2207ndash2212 2003
[30] B Zhou ldquoInput delay compensation of linear systems with bothstate and input delays by nested predictionrdquoAutomatica vol 50no 5 pp 1434ndash1443 2014
[31] M Najafi S Hosseinnia F Sheikholeslam and M KarimadinildquoClosed-loop control of dead time systems via sequential sub-predictorsrdquo International Journal of Control vol 86 no 4 pp599ndash609 2013
[32] F Sheikholeslam S Hosseinnia M Najafi and Q WangldquoRobust H infin control of single input-delay systems based onsequential sub-predictorsrdquo IET Control Theory amp Applicationsvol 8 no 13 pp 1175ndash1184 2014
[33] F Cacace F Conte A Germani and G Palombo ldquoOptimalcontrol of linear systems with large and variable input delaysrdquoSystems amp Control Letters vol 89 pp 1ndash7 2016
[34] F Cacace A Germani and C Manes ldquoPredictor-based controlof linear systems with large and variable measurement delaysrdquoInternational Journal of Control vol 87 no 4 pp 704ndash714 2014
[35] F Mazenc and M Malisoff ldquoStabilization and robustness anal-ysis for time-varying systems with time-varying delays usinga sequential subpredictors approachrdquo Automatica vol 82 pp118ndash127 2017
[36] A Germani C Manes and P Pepe ldquoA new approach to stateobservation of nonlinear systems with delayed outputrdquo Instituteof Electrical andElectronics Engineers Transactions onAutomaticControl vol 47 no 1 pp 96ndash101 2002
[37] M Velasco-Villa J Heras-Godınez J A Vazquez-Santacruzand V Fragoso-Rubio ldquoDelayed consensus problem for singleand double integrator systemsrdquo Mathematical Problems inEngineering vol 2015 Article ID 461098 15 pages 2015
[38] V Fragoso-Rubio M Velasco-Villa and M A Hernandez-Perez ldquoConsensus problem for linear time invariant systemswith time-delayrdquo in Proceedings of the National Conference ofAutomatic Control rsquo17 pp 90ndash95 2017
[39] C Godsil and G Royle Algebraic Graph Theory Springer NewYork NY USA 2001
[40] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[41] W Michiels K Engelborghs P Vansevenant and D RooseldquoContinuous pole placement for delay equationsrdquo Automaticavol 38 no 5 pp 747ndash761 2002
[42] K Gu V L Kharitonov and J Chen Stability of Time-DelaySystems Birkhauser 2003
[43] R E Bellman and K L Cooke Differential-Difference Equa-tions Rand Corporation 1963
[44] I Estrada-Sanchez M Velasco-Villa and H Rodrıguez-CortesldquoPrediction-based control for nonlinear systems with inputdelayrdquoMathematical Problems in Engineering vol 2017 ArticleID 7415418 11 pages 2017
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

4 Mathematical Problems in Engineering
The error dynamics (9) is given by
1198901199081198941 (119905) = 119894 (119905 + 120591119894) minus 1199081198941 (119905) 119890119908119894119891 (119905) = 119908119894119891minus1 (119905 + 120591119894) minus 119908119894119891 (119905)
for 119891 = 2 3 119898(10)
resulting in
1198901199081198941 (119905) = 119860 1198941198901199081198941 (119905) minus 119871 1198941198621198941198901199081198941 (119905 minus 120591119894) 119890119908119894119891 (119905) = 119860 119894119890119908119894119891 (119905) + 119871 119894119862119894119890119908119894119891minus1 (119905)
minus 119871 119894119862119894119890119908119894119891 (119905 minus 120591119894) (11)
with 119891 = 2 3 119898 The vectorial form of (11) is the time-delay error system given by
119890119908119894 (119905) = 119860lowast0119890119908119894 (119905) + 119860lowast1119890119908119894 (119905 minus 120591119894) (12)
with 119890119908119894 = [1198901199081198941 119890119908119894119898]119879 for 119894 = 1 119899 and
119860lowast0 =[[[[[[[
119860 119894 0 sdot sdot sdot 0 0119871 119894119862119894 119860 119894 sdot sdot sdot 0 0 d
0 0 sdot sdot sdot 119871 119894119862119894 119860 119894
]]]]]]]
119860lowast1 = [[[[[
minus119871 119894119862119894 sdot sdot sdot 0 d
0 sdot sdot sdot minus119871 119894119862119894
]]]]]
(13)
where 0 isin R119901times119901 is a matrix with all inputs equal to zero
41 Related Predictor Scheme The predictor given by (7) isequivalent to the sequential subpredictors strategy proposedby [31] that is recalled in the following
Consider system (1) and assume that all the state 119909(119905) isavailable for measurement this is 119862119894 = 119868
(119905) = 119860119909 (119905) + 119861119906 (119905 minus 120591) (14)
and there exists119898 isinZ+ such that
120591 = 120591119898 (15)
which allows proposing the sequence of subpredictors givenby
1 (119905) = 1198601199091 (119905) + 1198711 (1199091 (119905 minus 120591) minus 1199092 (119905)) + 119861119906 (119905)
119894 (119905) = 119860119909119894 (119905) + 119871 119894 (119909119894 (119905 minus 120591) minus 119909119894+1 (119905))+ 119861119906 (119905 minus (119894 minus 1) 120591)
119898 (119905) = 119860119909119898 (119905) + 119871119898 (119909119898 (119905 minus 120591) minus 119909119898+1 (119905))+ 119861119906 (119905 minus (119898 minus 1) 120591)
(16)
with 119909119894 isin R119899 119894 = 1 119898 The prediction errors for eachsubpredictor are defined as
119890119894 (119905) = 119909119894 (119905 minus (119898 minus 119894 minus 1) 120591) minus 119909119894+1 (119905 minus (119898 minus 1) 120591)119890119898 (119905) = 119909119898 (119905 minus 120591) minus 119909 (119905) (17)
for 119894 = 1 119898 minus 1 and the error dynamics given by
119890119894 (119905) = 119860119890119894 (119905) + 119871 119894119890119894 (119905 minus 120591) minus 119871 119894+1119890119894+1 (119905 minus 120591)119890119898 (119905) = 119860119890119898 (119905) + 119871119898119890119898 (119905 minus 120591) (18)
for 119894 = 1 119898 minus 1 Asymptotic convergence for the errordynamics is guaranteed by means of an LMI method thatconsiders the closed-loop system that allows calculating thesubpredictors and controlling gain matrices
Themain difference between both schemes is that authorsin [31] consider systems where it is possible to read the wholestate and the predictor-observer (7) presented here includesthe cases when only a partial measurement is available Therelation between both schemes can be found considering thefollowing coordinate change
1199081 (119905) = 119909119898 (119905)
119908119898 (119905) = 1199091 (119905) (19)
and for the error signals
119890119908119894 (119905) = minus119890119898+1minus119894 (119905 + (119898 + 1 minus 119894) 120591) (20)
for 119894 = 1 119898 to subpredictors (16) and prediction errors(17) and assuming 119862 = 119868 in system (1) results in the chain ofpredictors (7) and error signals (12)
Remark 5 It is important to note that the predictor (16)cannot be used to estimate the future state of system (1) when119862119894 = 11986842 Convergence Analysis of the Predictor-Observer Theconvergence to zero of the injection errors (9) is assured byshowing the stability of the error dynamics (12)
Mathematical Problems in Engineering 5
Lemma 6 Let the predictor-observer (7) satisfy Assumptions1 2 and 3 Suppose that there exist positive gain matrices 119871 119894 for119894 = 1 2 119899 such that the matrix (119860 119894minus119871 119894119862119894) is Hurwitz thenthere exists a sufficiently large119898119894 such that the error signals (9)exponentially converge to zero
Proof The characteristic equation of (12) is given by
119901 (119904) = det (119904119868119898119901 minus 119860lowast0 minus 119860lowast1119890minus119904120591119894) = 0 (21)
It is possible to show that (21) can be rewritten as
119901 (119904) = 119898prod119891=1
(119868119899119904 minus 119860 119894 + 119871 119894119862119894119890minus119904120591119894) = 0 (22)
It is clear that every factor of (22) represents the Laplacetransform of a system of the form
119890119908119894119891 (119905) = 119860 119894119890119908119894119891 (119905) minus 119871 119894119862119894119890119908119894119891 (119905 minus 120591119894) (23)
Since the parameters of 119871 119894 are free from the observabilityassumption of the pair (119860 119894 119862119894) it is always possible to locatethe eigenvalues of the matrix 119860 119894 minus 119871 119894119862119894 in the left halfcomplex plane The Hurwitz property of matrix 119860 119894 minus 119871 119894119862119894assures the stability of the differential difference equation(23) for a sufficiently small time delay 120591119894 [41] The maximumtime delay 120591lowast119894 for which system (23) will be asymptoticallystable depends on the choice of the observer gain 119871 119894 and itscomputation is not an easy task since its complexity rises asthe dimension of the system increases Thus given a gain119871 119894 such that 119860 119894 minus 119871 119894119862119894 is a Hurwitz matrix it is alwayspossible to asymptotically stabilize the prediction error (23)for a constant time delay 120591119894 lt 120591lowast119894 This fact can be verifiedfor instance by considering [42] or by reviewing the poleassignment procedure given in [41] Based on the abovearguments it will be assumed without loss of generality thatthere exist 119871 119894 and 120591lowast119894 such that system (23) is asymptoticallystable for 0 le 120591119894 lt 120591lowast119894 It should also be noticed that thestability of (23) is not only asymptotic but also exponential[43] Furthermore if matrix 119871 119894 is chosen according to the rulegiven inTheorem 31 in [34] this is
119871 = 119890119860119900120591lowast (24)
with
119860119900 = 119860 minus 119871119862 (25)
where 119871 is such that all the real parts of the eigenvalues of 119860119900are smaller than some negative real constant 120572 it is possibleto guarantee the exponential convergence of the predictionerrors 119890119908119894119891(119905) to zero which results in the convergence of theestimated future state 119908119894119898(119905) to the real future value 119909(119905 + 120591119894)Remark 7 It should be pointed out that a predictor of theform (23) with 119898 = 1 designed for a system with timedelay at the output was considered in [25] also for the case119898 = 1 in [44] a predictor for a nonlinear input delay systemis designed As mentioned before the partitioned predictorpresented in [31] is similar to the one presented in this sectionconsidering 119862 = 119868
Remark 8 Notice that in the case of 120591119894 = 0 the errordynamics (23) takes the form
119890119908119894119891 (119905) = (119860 119894 minus 119871 119894119862119894) 119890119908119894119891 (119905) (26)
where the stability is determined by the eigenvalues of thematrix 119860 119894 minus 119871 119894119862119894 that by the observability assumption canalways be stabilizable
Remark 9 It should be noticed that 120591119894 is given by 120591119894 =119898120591119894 therefore the larger number of subdelays considered byscheme (7) is the larger delay 120591119894 can be compensated withthe drawback of an increasing dimension of the proposedpredictor-observer
The following result allows obtaining the estimated values119909119894(119905 + 119891120591119894) from the future real values 119909119894(119905 + 119891120591119894) in (4)
Lemma 10 Suppose for system (1) that Assumptions 1 2 and3 are satisfied For every 120591119894 gt 0 there always exists a predictor-observer (7) such that the estimated states 119908119894119891(119905) exponentiallyconverge to the future values 119909119894(119905 + 119891120591119894) for 119891 = 1 119898Proof From the definition of error (9) it is possible to showthat
119908119894119891 (119905) = 119909 (119905 + 119891120591119894) minus119891sum119896=1
119890119908119894119896 (119905 + (119891 minus 119896) 120591119894) (27)
for 119896 = 1 119891 Then by Lemma 6 it is possible to concludethat the estimated states 119908119894119891(119905) exponentially converge to thecorresponding real values
Remark 11 Note that if119898 997888rarr infin then 120591119894 997888rarr 0 relaxing theconvergence conditions of the estimation error This impliesthat it is always possible to stabilize system (12) choosing theinteger119898 large enough
5 Consensus Problem
In this section the consensus protocol for LTI systemsin time-delay is presented The set of agents has a fixedcommunication topology that contains a directed spanningtreeThe dynamics of each agent is given by (1)This protocolconsiders the solution presented in [7] that is adapted to beused with the future state values estimated in the previoussection By using the predicted states instead of the currentone it is possible to deal with systems with large time-delays
Consider a set of 119899 agents of the form (1) where for thesake of easy of presentation it is assumed that 120591119894 = 120591 for 119894 =1 119899 that is
119894 (119905) = 119860119909119894 (119905) + 119861119906119894 (119905 minus 120591) (28)
The vectorial form of the complete set of agents is givenby
(119905) = (119868119899 otimes 119860) 119909 (119905) + (119868119899 otimes 119861) 119906 (119905 minus 120591) (29)
where 119909 = [1199091 1199092 119909119899]119879 119906 = [1199061 1199062 119906119899]119879 and 119868119899 isinR119899times119899
6 Mathematical Problems in Engineering
The following control scheme based on the predictor-observer (7) is proposed
119906119894 (119905) = 1198701119908119894119898 (119905) + 1198702 119899sum119895=1
119897119894119895 (119908119895119898 (119905) minus 119908119894119898 (119905)) (30)
for 119894 119895 = 1 2 119899 1198701 1198702 isin R119902times119901 where 119897119894119895 are theentries of the Laplacian matrix of the graph The controlscheme (30) can be rewritten as
119906 (119905) = (119868119899 otimes 1198701 minusL otimes 1198702) 119908119898 (119905) (31)
whereL isin R119899times119899 is the Laplacian of the system and119908119898 =[1199081119898 119908119899119898]119879 is the predicted stateThe closed-loop system (29)ndash(31) is given by
(119905) = (119868119899 otimes 119860) 119909 (119905)+ (119868119899 otimes 119861) (119868119899 otimes 1198701 minusL otimes 1198702) 119908119898 (119905 minus 120591) (32)
Considering that (119860otimes119861)(119862otimes119863) = 119860119862otimes119861119863 it is obtainedthat
(119905) = (119868119899 otimes 119860) 119909 (119905)+ (119868119899 otimes 1198611198701 minusL otimes 1198611198702) 119908119898 (119905 minus 120591) (33)
Recalling the observation errors
1198901199081 (119905) = 119909 (119905 + 120591) minus 1199081 (119905) 119890119908119891 (119905) = 119908119891minus1 (119905 + 120591) minus 119908119891 (119905) for 119891 = 2 3 119898 (34)
the estimated state119908119898(119905minus120591) can be rewritten as a function ofthe real state and the observation errors
119908119898 (119905 minus 120591) = 119909 (119905) minus 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (35)
where 119890119908119891 = [1198901199081119891 119890119908119899119891]119879 producing (119905) = 119867119909 (119905)
+ (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (36)
where119867 = (119868119899 otimes (119860 + 1198611198701) minusL otimes 1198611198702)Consider now a nonsingular matrix 119880 isin R119899times119899 such that
119880minus1L119880 = 119869L (37)
for 119869L isin R119899times119899 representing the Jordan canonical form of theLaplacian matrixL
Considering now the globally invertible change of vari-able
119909 = (119880minus1 otimes 119868119902) 119909 119909 = (119880 otimes 119868119902) 119909 (38)
for 119909 = [1199091 1199092 119909119899]119879 then it is possible to show that
(119880 otimes 119868119902) (119905)= [119868119899 otimes (119860 + 1198611198701)] (119880 otimes 119868119902) 119909 (119905)minus (L otimes 1198611198702) (119880 otimes 119868119902) 119909 (119905)+ [L otimes 1198611198702 minus 119868119899 otimes 1198611198701] 119898sum
119891=1
119890119908119891 (119905 minus 119891120591)(39)
from where
(119905)= [119868119899 otimes (119860 + 1198611198701) minus 119869119871 otimes 1198611198702] 119909 (119905)+ [119880minus1L otimes 1198611198702 minus 119880minus1 otimes 1198611198701] 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (40)
Equation (40) can be rewritten as
(119905) = Γ119909 (119905) + Δ 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (41)
where
Δ = 119880minus1L otimes 1198611198702 minus 119880minus1 otimes 1198611198701 (42)
Γ =[[[[[[[[[[
119860 + 1198611198701 0 0 sdot sdot sdot 00 1205742 1205751198611198702 sdot sdot sdot 0 d d
0 0 sdot sdot sdot 120574119899minus1 12057511986111987020 0 sdot sdot sdot 0 120574119899
]]]]]]]]]]
(43)
with 120574119894 = 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 119899 and 120575 = 0 or120575 = 1 depending on the structure of 119869119871Remark 12 Notice that since 119867 and Γ are similar matricesthey have the same eigenvalues Furthermore in (43) it can beseen that those eigenvalues correspond to the ones of119860+1198611198701and 119860 + 1198611198701 minus 1205821198941198611198702 for 119894 = 2 3 11989951 Consensus Analysis
Lemma 13 Consider a set of 119899 agents of the form (28)with a communication topology with a directed spanning treeUnder these circumstances solution to the consensus problemis achieved if and only if the matrices 119860 + 1198611198701 minus 1205821198711198941198611198702 for119894 = 2 3 119899 are HurwitzProof Let the invertible matrix 119875 = [1199011 1199012 119901119899119901] isinC119899119901times119899119901 be such that
119875minus1119867119875 = 119869119867 (44)
Mathematical Problems in Engineering 7
with 119869119867 being the Jordan canonical formof119867 defined in (36)Considering the change of coordinates
119909 = 119875minus1119909 119909 = 119875119909 (45)
(36) yields
119909 = 119875minus1119867119875119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (46)
That is119909 = 119869119867119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (47)
The solution to system (47) is given by
119909 (119905) = 119890119869119867119905119909 (0)+ 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(48)
Since 119909 = 119875minus1119909 it is possible to write119909 (119905) = 119875119890119869119867119905119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(49)
Let 119867 isin R119899119901times119899119901 with eigenvectors 119901119892 isin C (119892 =1 2 119899119901) Note from Remark 12 that 119901119892 (119892 = 1 2 119899)correspond to the eigenvalues of119860+1198611198701 while eigenvectors119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) correspond to the eigenvalues of119860 + 1198611198701 minus 1205821198711198941198611198702 119894 = 2 3 119899 Then two consensus sub-spaces can be established subspaceC(119867) spanned by119901119892 (119892 =1 2 119899) and a complementary consensus subspace C(119867)spanned by 119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) Therefore theconsensus spaceC119899119901 is given by
C119899119901 = C oplusC (50)
Since the eigenvalues of119867 correspond to the eigenvaluesof119860+1198611198701 and119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 matrix 119890119869119867119905can be written as
119890119869119867119905 = [119890119869119862119905 00 119890119869119862119905] (51)
defining
119909 (0) = 119909119862 (0) + 119909119862 (0) (52)
Equation (49) can now be rewritten as
119909 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579
(53)
Considering that the solution of the closed-loop system(53) can be expressed as
119909 (119905) = 119909119862 (119905) + 119909119862 (119905)+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(54)
and noting that the limit when 119905 997888rarr infin of the third term in(54) is a constant value thus
lim119905997888rarrinfin119890119908119891 (119905) = 0 (55)
The system consensus state can be established by meansof the analysis of 119909119862(119905) and 119909119862(119905) From (53) and (54) 119909119862(119905)is given by
119909119862 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909119862 (0) (56)
Describing the initial state as
119909 (0) = 119909119862 (0) + 119909119862 (0)= 119901sum119892=1
120572119892 (0) 119901119892 +119899119901sum119892=119901+1
120572119892 (0) 119901119892= 119875 [1205721 (0) 120572119901 (0) 0 0]119879+ 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(57)
thus
119909119862 (0) = 119875 [1205721 (0) 120572119901 (0) 0 0]119879119909119862 (0) = 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(58)
where 120572119892(0) 119892 = 1 2 119899119901 are real constants From (58)119909119862(119905) yields119909119862 (119905) = 119875[119890
119869119862119905 00 119890119869119862119905] [1205721 (0) 120572119901 (0) 0 0]
119879 (59)
That is
119909119862 (119905) = 119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]119879
0 ] (60)
8 Mathematical Problems in Engineering
Since 119869119862 is the Jordan block of 119867 corresponding to theeigenvalues of119860+1198611198701 and considering that the pair (119860 119861) iscontrollable it can be concluded that the pair (119860 + 1198611198701 119861) isalso controllable and therefore the right choice of matrix 1198701guarantees that 119909119862(119905) achieves consensus Now 119909119888(119905) is givenby
119909119862 (119905)= 119875[119890119869119862119905 00 119890119869119862119905] [0 0 120572119901+1 (0) 120572119899119901 (0)]
119879 (61)
that yields
119909119862 (119905) = 119875[[0
119890119869119862119905 [120572119901+1 (0) 120572119899119901 (0)]119879]] (62)
And since 119869119862 is the Jordan block of 119867 corresponding tothe eigenvalues of 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 3 119899 thenit can be concluded that for system (28) to achieve consensusmatrices119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 must be Hurwitzwhich implies
lim119905997888rarrinfin119909119862 (119905) = 0 (63)
Considering (60) and (63) the system consensus value isgiven by
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin
119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ]
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1
times (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119890119908119891 (120579 minus 119891120591) 119889120579
(64)
Since it has been shown that lim119905997888rarrinfin119890119908119891(119905) = 0lim119905997888rarrinfin119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579 = 119864(65)
with a real constant vector 119864 thenlim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ] + 119864 (66)
Finally defining
[1205731 (119905) 120573119901 (119905)]119879 = 119890119869119862119905 [1205721 (0) 120572119901 (0)]119879 (67)
and considering that Lemma 4 from [7] proves that the first119901 eigenvectors of119867 are given by 119901119892 = 1119899 otimes 119888119895 for 119892 = 1 119901
1 2 3
456
Figure 1 Communication topology
where 119888119892 are the eigenvectors of 119860 + 1198611198701 and 1119899 isin R119899 is thevector with all of its entries equal to one the consensus value(66) yields
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin1119899
otimes [1198881 119888119901] [1205731 (119905) 120573119901 (119905)]119879 + 119864(68)
Remark 14 It should be noted that the previous proof isbased on the corresponding proof presented in [7] with thedifference that the proof presented in this work includes thepredicted state used in the consensus protocol which resultsin a consensus value affected by the initial injection errorsrepresented by 119864 in (68)
Remark 15 Notice that the prediction-observation schemeproposed here can compensate the time-delay of the agentswhen it is placed either at the input or at the output Inthe case of agents with input time-delay each agent willestimate its own future state and send it to its neighborswhich will use them to calculate its own control thuscompensating their input time-delay In the case where theagents present an output time-delay once again each agentwould estimate its current state from its delayed output andsend the undelayed estimated state to the other agents Inboth cases the consensus will be achieved by means of adecentralized algorithm
6 Numerical Evaluations
Numerical evaluations of the proposed solution carriedout consider two cases the Multiagent Supporting System(MASS) composed by six agents presented in [7] and a mul-tiagent system formed by six agents with unstable dynamicswhose stabilization is achieved in [31] For simplicity inboth cases the communication topology is used depicted inFigure 1 with the corresponding Laplacian matrix given by
L =[[[[[[[[[[[[
1 0 0 0 0 minus1minus1 1 0 0 0 00 minus1 2 minus1 0 00 0 0 1 minus1 00 0 0 minus1 1 0minus1 0 0 0 minus1 2
]]]]]]]]]]]]
(69)
Mathematical Problems in Engineering 9
0 t108642
minus2
0
2
4
6
x11x21x31
x41x51x61
Figure 2 Time evolution of the state MASS system 120591 = 12119904
0 t108642
minus8minus6minus4minus2024
x12x22x32
x42x52x62
Figure 3 Time evolution of the state MASS system 120591 = 12119904
Example 1 In the case of the MASS system the dynamics ofeach agent is given by
119894 (119905) = [[[0 1minus119896119898119894minus119863119898119894]]]119909119894 (119905) + [01] 119906 (119905 minus 120591119894) (70)
where 119909119894(119905) = [119911119894(119905) 119894(119905)]119879 119911119894(119905) is the height of each agent119898119894 is the mass 119863 is the damping at each agent 119896 is thestiffness and 119906119894(119905) is the control input The implementationof the predictor considers a partition of119898 = 4 and the systemparameters 119898119894 = 106 119896 = 120 and 119863 = 505 The initialconditions are set as
1199090 = [minus3 minus15 minus2 minus2 0 1 4 minus1 2 3 6 2]119879 (71)
The gain matrix for the predictor-observer is given byŁ119894 = [1 0 4 0]119879 and the consensus gain vectors 1198701 =[113208 minus02358] and 1198702 = [88687 1] The delay consid-ered is 120591 = 12119904 the results are given in Figures 2 3 4 and 5that represent the evolution in time of the state observationerrors and control signal respectively The evolution of thelogarithm of the homogeneous norm of the prediction erroris depicted in Figure 6 to show its exponential convergence Itcan be seen that with the partition of the predictor-observerlarge delays can be compensated
minus2
0
2
4
6
ew11ew21ew31
ew41ew51ew61
minus8minus6minus4minus2024
ew12ew22ew32
ew42ew52ew62
0 t108642
0 t108642
Figure 4 Time evolution of the estimation errors MASS system120591 = 12119904
minus1
0
1
2
3
4
u1u2u3
u4u5u6
0 t108642
Figure 5 Time evolution of the control signal MASS system 120591 =12119904
Example 2 In a more challenging situation an unstablesystem presented in [31] is taken into account to form amultiagent system with 119899 = 6 and the communicationtopology presented in Figure 1 The dynamics of each agentis given by
(119905) = [minus5 minus63 4 ] 119909 (119905) + [04] 119906 (119905 minus 120591)
119910 (119905) = [minus2 2] 119909 (119905) (72)
10 Mathematical Problems in Engineeringlog((e))
1
0
minus1
minus2
minus3
minus4
minus5
0 t108642
Figure 6 Time evolution of the logarithm of the prediction errorMASS system 120591 = 12119904
0 5 10 t
minus20
minus10
0
10
20
x11x21x31
x41x51x61
0 5 10 tminus20
minus10
0
10
20
x12x22x32
x42x52x62
Figure 7 Time evolution of the state unstable agents 120591 = 1119904
The delay of the system is 120591 = 1119904 the partition of theobserver is119898 = 4 and the initial conditions are set as
1199090 = [minus3 02 minus1 05 3 1 minus15 0 4 minus12 minus2 0]119879 (73)
The gain of each subpredictor is given by119871 119894 = [minus08212 07263]119879 and the control gains are1198701 = [minus05417 minus 075] and 1198702 = [minus4 03] Figures 7and 8 present the evolution in time of the state of the systemand the prediction errors respectively where after a transientperiod the desired convergence is obtained Figure 9 presentsthe evolution of the control signal The logarithm of thenorm of the prediction error is presented in Figure 10
0 5 10 tminus20
minus10
0
10
ew11ew21ew31
ew41ew51ew61
0 5 10 t
minus10
0
10
20
ew12ew22ew32
ew42ew52ew62
Figure 8 Time evolution of the estimation errors unstable agents120591 = 1119904
0 5 10 t
minus6
minus4
minus2
0
2
4
6
u1u2u3
u4u5u6
Figure 9 Time evolution of the control signal unstable agents 120591 =1119904
7 Conclusions
This work deals with the consensus problem for multiagentsystems with LTI dynamics and input time-delay A modifiedpartitioned predictor-observer is proposed to estimate thefuture state values of the agents These predicted states areused in the consensus protocol in order to compensatethe input time-delays Formal proofs for the convergenceof the predictor and consensus are given The performednumerical evaluations show that a larger number of partitions
Mathematical Problems in Engineering 11
0 5 10 t
log((e))
25
2
15
1
05
0
minus05
minus1
Figure 10 Time evolution of the logarithm of the prediction errorunstable agents 120591 = 1119904
in the predictor-observer results in an improvement of theresponse of the system and in a larger time-delay that can becompensated
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] W Ren and E Atkins ldquoDistributed multi-vehicle coordinatedcontrol via local information exchangerdquo International Journal ofRobust and Nonlinear Control vol 17 no 10-11 pp 1002ndash10332007
[2] R Olfati-Saber and R M Murray ldquoDistributed cooperativecontrol ofmultiple vehicle formations using structural potentialfunctionsrdquo IFACWorld Congress 2002
[3] J A Fax and R M Murray ldquoInformation flow and cooperativecontrol of vehicle formationsrdquo IEEE Transactions on AutomaticControl vol 49 no 9 pp 1465ndash1476 2004
[4] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[5] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbour rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[6] L Moreau ldquoConsensus and cooperation in networked multi-agent systemsrdquo IEEE Transactions onAutomatic Control vol 50no 2 pp 169ndash182 2005
[7] J Xi N Cai and Y Zhong ldquoConsensus problems for high-orderlinear time-invariant swarm systemsrdquo Physica A StatisticalMechanics and its Applications vol 389 no 24 pp 5619ndash56272010
[8] W Ren and R W BeardDistributed Consensus in Multi-VehicleCooperative Control Theory and Applications Springer-VerlagLondon UK 2008
[9] L Peng J Yingmin D Junping and Y Shiying ldquoDistributedconsensus protocol for second-order agents with fixed topology
and time-delayrdquo in Proceedings of the 26th Chinese ControlConference (CCC rsquo07) pp 577ndash581 2007
[10] Z Yan D Wu and Y Liu ldquoConsensus of discrete multiagentsystem with various time delays and environmental distur-bancesrdquo Entropy vol 16 no 12 pp 6524ndash6538 2014
[11] D Lee and M W Spong ldquoAgreement with non-uniforminformation delaysrdquo in Proceedings of the American ControlConference IEEE 2006
[12] P Lin and Y Jia ldquoConsensus of a class of second-order multi-agent systems with time-delay and jointly-connected topolo-giesrdquo IEEE Transactions on Automatic Control vol 55 no 3 pp778ndash784 2010
[13] P Lin and Y Jia ldquoConsensus of second-order discrete-timemulti-agent systems with nonuniform time-delays and dynam-ically changing topologiesrdquoAutomatica vol 49 no 5 pp 2154ndash2158 2009
[14] J Xi Z Shi and Y Zhong ldquoConsensus analysis and designfor high-order linear swarm systems with time-varying delaysrdquoPhysicaA StatisticalMechanics and its Applications vol 390 no23-24 pp 4114ndash4123 2011
[15] J Xi Z Wang G Liu and Y Zhong ldquoConsensus problems forlinear time-varying swarm systemswith topology variances andmultiple time delaysrdquo in Proceedings of the 2013 32nd ChineseControl Conference (CCC rsquo13) pp 192ndash198 2013
[16] X Luo X Li S Li and X Guan ldquoConsensus for linear multi-agent systems with constant and time-varying communicationdelays via delay-decomposition approachrdquo in Proceedings of the11th World Congress on Intelligent Control and Automation pp353ndash358 2014
[17] Y Cao T Oguchi P Verhoeckx and H Nijmeijer ldquoConsensuscontrol for a multiagent systemwith time delaysrdquoMathematicalProblems in Engineering vol 2017 Article ID 4063184 11 pages2017
[18] S Mehra and S R Sahoo ldquoTrajectory tracking with input delayinmulti-agent system Double integrator caserdquo in Proceedings ofthe 2016 International Conference onUnmannedAircraft Systems(ICUAS rsquo16) pp 387ndash393 2016
[19] S Mehra A Sen and S R Sahoo ldquoTrajectory tracking inheterogeneous multi-agent system without and with inputdelayrdquo in Proceedings of the 2017 Indian Control Conference (ICCrsquo17) pp 338ndash343 2017
[20] B Zhou and Z Lin ldquoConsensus of high-order multi-agent sys-tems with large input and communication delaysrdquo Automaticavol 50 no 2 pp 452ndash464 2014
[21] C Wang Z Zuo Z Lin and Z Ding ldquoA truncated predictionapproach to consensus control of lipschitz nonlinearmultiagentsystems with input delayrdquo IEEE Transactions on Control ofNetwork Systems vol 4 no 4 pp 716ndash724 2017
[22] P Shi and Q K Shen ldquoObserver-based leader-following con-sensus of uncertain nonlinear multi-agent systemsrdquo Interna-tional Journal of Robust and Nonlinear Control 2017
[23] O J M Smith ldquoCloser control of loops with deadtimerdquoChemical Engineering Progress vol 53 no 5 pp 217ndash219 1957
[24] K Watanabe and M Ito ldquoA process-model control for linearsystems with delayrdquo IEEE Transactions on Automatic Controlvol 26 no 6 pp 1261ndash1269 1981
[25] W Michiels and D Roose ldquoTime-delay compensation inunstable plants using delayed state feedbackrdquo in Proceedings ofthe 40th IEEE Conference on Decision and Control rsquo01 vol 2 pp1433ndash1437 IEEE 2001
12 Mathematical Problems in Engineering
[26] A Manitius and A W Olbrot ldquoFinite spectrum assignmentproblem for systems with delaysrdquo IEEE Transactions on Auto-matic Control vol 24 no 4 pp 541ndash553 1979
[27] Z Artstein ldquoLinear systems with delayed controls a reductionrdquoIEEE Transactions on Automatic Control vol 27 no 4 pp 869ndash879 1982
[28] L Mirkin and N Raskin ldquoEvery stabilizing dead-time con-troller has an observerndashpredictor-based structurerdquo Automaticavol 39 no 10 pp 1747ndash1754 2003
[29] S Mondie and W Michiels ldquoFinite spectrum assignment ofunstable time-delay systems with a safe implementationrdquo IEEETransactions on Automatic Control vol 48 no 12 pp 2207ndash2212 2003
[30] B Zhou ldquoInput delay compensation of linear systems with bothstate and input delays by nested predictionrdquoAutomatica vol 50no 5 pp 1434ndash1443 2014
[31] M Najafi S Hosseinnia F Sheikholeslam and M KarimadinildquoClosed-loop control of dead time systems via sequential sub-predictorsrdquo International Journal of Control vol 86 no 4 pp599ndash609 2013
[32] F Sheikholeslam S Hosseinnia M Najafi and Q WangldquoRobust H infin control of single input-delay systems based onsequential sub-predictorsrdquo IET Control Theory amp Applicationsvol 8 no 13 pp 1175ndash1184 2014
[33] F Cacace F Conte A Germani and G Palombo ldquoOptimalcontrol of linear systems with large and variable input delaysrdquoSystems amp Control Letters vol 89 pp 1ndash7 2016
[34] F Cacace A Germani and C Manes ldquoPredictor-based controlof linear systems with large and variable measurement delaysrdquoInternational Journal of Control vol 87 no 4 pp 704ndash714 2014
[35] F Mazenc and M Malisoff ldquoStabilization and robustness anal-ysis for time-varying systems with time-varying delays usinga sequential subpredictors approachrdquo Automatica vol 82 pp118ndash127 2017
[36] A Germani C Manes and P Pepe ldquoA new approach to stateobservation of nonlinear systems with delayed outputrdquo Instituteof Electrical andElectronics Engineers Transactions onAutomaticControl vol 47 no 1 pp 96ndash101 2002
[37] M Velasco-Villa J Heras-Godınez J A Vazquez-Santacruzand V Fragoso-Rubio ldquoDelayed consensus problem for singleand double integrator systemsrdquo Mathematical Problems inEngineering vol 2015 Article ID 461098 15 pages 2015
[38] V Fragoso-Rubio M Velasco-Villa and M A Hernandez-Perez ldquoConsensus problem for linear time invariant systemswith time-delayrdquo in Proceedings of the National Conference ofAutomatic Control rsquo17 pp 90ndash95 2017
[39] C Godsil and G Royle Algebraic Graph Theory Springer NewYork NY USA 2001
[40] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[41] W Michiels K Engelborghs P Vansevenant and D RooseldquoContinuous pole placement for delay equationsrdquo Automaticavol 38 no 5 pp 747ndash761 2002
[42] K Gu V L Kharitonov and J Chen Stability of Time-DelaySystems Birkhauser 2003
[43] R E Bellman and K L Cooke Differential-Difference Equa-tions Rand Corporation 1963
[44] I Estrada-Sanchez M Velasco-Villa and H Rodrıguez-CortesldquoPrediction-based control for nonlinear systems with inputdelayrdquoMathematical Problems in Engineering vol 2017 ArticleID 7415418 11 pages 2017
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 5
Lemma 6 Let the predictor-observer (7) satisfy Assumptions1 2 and 3 Suppose that there exist positive gain matrices 119871 119894 for119894 = 1 2 119899 such that the matrix (119860 119894minus119871 119894119862119894) is Hurwitz thenthere exists a sufficiently large119898119894 such that the error signals (9)exponentially converge to zero
Proof The characteristic equation of (12) is given by
119901 (119904) = det (119904119868119898119901 minus 119860lowast0 minus 119860lowast1119890minus119904120591119894) = 0 (21)
It is possible to show that (21) can be rewritten as
119901 (119904) = 119898prod119891=1
(119868119899119904 minus 119860 119894 + 119871 119894119862119894119890minus119904120591119894) = 0 (22)
It is clear that every factor of (22) represents the Laplacetransform of a system of the form
119890119908119894119891 (119905) = 119860 119894119890119908119894119891 (119905) minus 119871 119894119862119894119890119908119894119891 (119905 minus 120591119894) (23)
Since the parameters of 119871 119894 are free from the observabilityassumption of the pair (119860 119894 119862119894) it is always possible to locatethe eigenvalues of the matrix 119860 119894 minus 119871 119894119862119894 in the left halfcomplex plane The Hurwitz property of matrix 119860 119894 minus 119871 119894119862119894assures the stability of the differential difference equation(23) for a sufficiently small time delay 120591119894 [41] The maximumtime delay 120591lowast119894 for which system (23) will be asymptoticallystable depends on the choice of the observer gain 119871 119894 and itscomputation is not an easy task since its complexity rises asthe dimension of the system increases Thus given a gain119871 119894 such that 119860 119894 minus 119871 119894119862119894 is a Hurwitz matrix it is alwayspossible to asymptotically stabilize the prediction error (23)for a constant time delay 120591119894 lt 120591lowast119894 This fact can be verifiedfor instance by considering [42] or by reviewing the poleassignment procedure given in [41] Based on the abovearguments it will be assumed without loss of generality thatthere exist 119871 119894 and 120591lowast119894 such that system (23) is asymptoticallystable for 0 le 120591119894 lt 120591lowast119894 It should also be noticed that thestability of (23) is not only asymptotic but also exponential[43] Furthermore if matrix 119871 119894 is chosen according to the rulegiven inTheorem 31 in [34] this is
119871 = 119890119860119900120591lowast (24)
with
119860119900 = 119860 minus 119871119862 (25)
where 119871 is such that all the real parts of the eigenvalues of 119860119900are smaller than some negative real constant 120572 it is possibleto guarantee the exponential convergence of the predictionerrors 119890119908119894119891(119905) to zero which results in the convergence of theestimated future state 119908119894119898(119905) to the real future value 119909(119905 + 120591119894)Remark 7 It should be pointed out that a predictor of theform (23) with 119898 = 1 designed for a system with timedelay at the output was considered in [25] also for the case119898 = 1 in [44] a predictor for a nonlinear input delay systemis designed As mentioned before the partitioned predictorpresented in [31] is similar to the one presented in this sectionconsidering 119862 = 119868
Remark 8 Notice that in the case of 120591119894 = 0 the errordynamics (23) takes the form
119890119908119894119891 (119905) = (119860 119894 minus 119871 119894119862119894) 119890119908119894119891 (119905) (26)
where the stability is determined by the eigenvalues of thematrix 119860 119894 minus 119871 119894119862119894 that by the observability assumption canalways be stabilizable
Remark 9 It should be noticed that 120591119894 is given by 120591119894 =119898120591119894 therefore the larger number of subdelays considered byscheme (7) is the larger delay 120591119894 can be compensated withthe drawback of an increasing dimension of the proposedpredictor-observer
The following result allows obtaining the estimated values119909119894(119905 + 119891120591119894) from the future real values 119909119894(119905 + 119891120591119894) in (4)
Lemma 10 Suppose for system (1) that Assumptions 1 2 and3 are satisfied For every 120591119894 gt 0 there always exists a predictor-observer (7) such that the estimated states 119908119894119891(119905) exponentiallyconverge to the future values 119909119894(119905 + 119891120591119894) for 119891 = 1 119898Proof From the definition of error (9) it is possible to showthat
119908119894119891 (119905) = 119909 (119905 + 119891120591119894) minus119891sum119896=1
119890119908119894119896 (119905 + (119891 minus 119896) 120591119894) (27)
for 119896 = 1 119891 Then by Lemma 6 it is possible to concludethat the estimated states 119908119894119891(119905) exponentially converge to thecorresponding real values
Remark 11 Note that if119898 997888rarr infin then 120591119894 997888rarr 0 relaxing theconvergence conditions of the estimation error This impliesthat it is always possible to stabilize system (12) choosing theinteger119898 large enough
5 Consensus Problem
In this section the consensus protocol for LTI systemsin time-delay is presented The set of agents has a fixedcommunication topology that contains a directed spanningtreeThe dynamics of each agent is given by (1)This protocolconsiders the solution presented in [7] that is adapted to beused with the future state values estimated in the previoussection By using the predicted states instead of the currentone it is possible to deal with systems with large time-delays
Consider a set of 119899 agents of the form (1) where for thesake of easy of presentation it is assumed that 120591119894 = 120591 for 119894 =1 119899 that is
119894 (119905) = 119860119909119894 (119905) + 119861119906119894 (119905 minus 120591) (28)
The vectorial form of the complete set of agents is givenby
(119905) = (119868119899 otimes 119860) 119909 (119905) + (119868119899 otimes 119861) 119906 (119905 minus 120591) (29)
where 119909 = [1199091 1199092 119909119899]119879 119906 = [1199061 1199062 119906119899]119879 and 119868119899 isinR119899times119899
6 Mathematical Problems in Engineering
The following control scheme based on the predictor-observer (7) is proposed
119906119894 (119905) = 1198701119908119894119898 (119905) + 1198702 119899sum119895=1
119897119894119895 (119908119895119898 (119905) minus 119908119894119898 (119905)) (30)
for 119894 119895 = 1 2 119899 1198701 1198702 isin R119902times119901 where 119897119894119895 are theentries of the Laplacian matrix of the graph The controlscheme (30) can be rewritten as
119906 (119905) = (119868119899 otimes 1198701 minusL otimes 1198702) 119908119898 (119905) (31)
whereL isin R119899times119899 is the Laplacian of the system and119908119898 =[1199081119898 119908119899119898]119879 is the predicted stateThe closed-loop system (29)ndash(31) is given by
(119905) = (119868119899 otimes 119860) 119909 (119905)+ (119868119899 otimes 119861) (119868119899 otimes 1198701 minusL otimes 1198702) 119908119898 (119905 minus 120591) (32)
Considering that (119860otimes119861)(119862otimes119863) = 119860119862otimes119861119863 it is obtainedthat
(119905) = (119868119899 otimes 119860) 119909 (119905)+ (119868119899 otimes 1198611198701 minusL otimes 1198611198702) 119908119898 (119905 minus 120591) (33)
Recalling the observation errors
1198901199081 (119905) = 119909 (119905 + 120591) minus 1199081 (119905) 119890119908119891 (119905) = 119908119891minus1 (119905 + 120591) minus 119908119891 (119905) for 119891 = 2 3 119898 (34)
the estimated state119908119898(119905minus120591) can be rewritten as a function ofthe real state and the observation errors
119908119898 (119905 minus 120591) = 119909 (119905) minus 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (35)
where 119890119908119891 = [1198901199081119891 119890119908119899119891]119879 producing (119905) = 119867119909 (119905)
+ (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (36)
where119867 = (119868119899 otimes (119860 + 1198611198701) minusL otimes 1198611198702)Consider now a nonsingular matrix 119880 isin R119899times119899 such that
119880minus1L119880 = 119869L (37)
for 119869L isin R119899times119899 representing the Jordan canonical form of theLaplacian matrixL
Considering now the globally invertible change of vari-able
119909 = (119880minus1 otimes 119868119902) 119909 119909 = (119880 otimes 119868119902) 119909 (38)
for 119909 = [1199091 1199092 119909119899]119879 then it is possible to show that
(119880 otimes 119868119902) (119905)= [119868119899 otimes (119860 + 1198611198701)] (119880 otimes 119868119902) 119909 (119905)minus (L otimes 1198611198702) (119880 otimes 119868119902) 119909 (119905)+ [L otimes 1198611198702 minus 119868119899 otimes 1198611198701] 119898sum
119891=1
119890119908119891 (119905 minus 119891120591)(39)
from where
(119905)= [119868119899 otimes (119860 + 1198611198701) minus 119869119871 otimes 1198611198702] 119909 (119905)+ [119880minus1L otimes 1198611198702 minus 119880minus1 otimes 1198611198701] 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (40)
Equation (40) can be rewritten as
(119905) = Γ119909 (119905) + Δ 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (41)
where
Δ = 119880minus1L otimes 1198611198702 minus 119880minus1 otimes 1198611198701 (42)
Γ =[[[[[[[[[[
119860 + 1198611198701 0 0 sdot sdot sdot 00 1205742 1205751198611198702 sdot sdot sdot 0 d d
0 0 sdot sdot sdot 120574119899minus1 12057511986111987020 0 sdot sdot sdot 0 120574119899
]]]]]]]]]]
(43)
with 120574119894 = 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 119899 and 120575 = 0 or120575 = 1 depending on the structure of 119869119871Remark 12 Notice that since 119867 and Γ are similar matricesthey have the same eigenvalues Furthermore in (43) it can beseen that those eigenvalues correspond to the ones of119860+1198611198701and 119860 + 1198611198701 minus 1205821198941198611198702 for 119894 = 2 3 11989951 Consensus Analysis
Lemma 13 Consider a set of 119899 agents of the form (28)with a communication topology with a directed spanning treeUnder these circumstances solution to the consensus problemis achieved if and only if the matrices 119860 + 1198611198701 minus 1205821198711198941198611198702 for119894 = 2 3 119899 are HurwitzProof Let the invertible matrix 119875 = [1199011 1199012 119901119899119901] isinC119899119901times119899119901 be such that
119875minus1119867119875 = 119869119867 (44)
Mathematical Problems in Engineering 7
with 119869119867 being the Jordan canonical formof119867 defined in (36)Considering the change of coordinates
119909 = 119875minus1119909 119909 = 119875119909 (45)
(36) yields
119909 = 119875minus1119867119875119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (46)
That is119909 = 119869119867119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (47)
The solution to system (47) is given by
119909 (119905) = 119890119869119867119905119909 (0)+ 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(48)
Since 119909 = 119875minus1119909 it is possible to write119909 (119905) = 119875119890119869119867119905119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(49)
Let 119867 isin R119899119901times119899119901 with eigenvectors 119901119892 isin C (119892 =1 2 119899119901) Note from Remark 12 that 119901119892 (119892 = 1 2 119899)correspond to the eigenvalues of119860+1198611198701 while eigenvectors119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) correspond to the eigenvalues of119860 + 1198611198701 minus 1205821198711198941198611198702 119894 = 2 3 119899 Then two consensus sub-spaces can be established subspaceC(119867) spanned by119901119892 (119892 =1 2 119899) and a complementary consensus subspace C(119867)spanned by 119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) Therefore theconsensus spaceC119899119901 is given by
C119899119901 = C oplusC (50)
Since the eigenvalues of119867 correspond to the eigenvaluesof119860+1198611198701 and119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 matrix 119890119869119867119905can be written as
119890119869119867119905 = [119890119869119862119905 00 119890119869119862119905] (51)
defining
119909 (0) = 119909119862 (0) + 119909119862 (0) (52)
Equation (49) can now be rewritten as
119909 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579
(53)
Considering that the solution of the closed-loop system(53) can be expressed as
119909 (119905) = 119909119862 (119905) + 119909119862 (119905)+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(54)
and noting that the limit when 119905 997888rarr infin of the third term in(54) is a constant value thus
lim119905997888rarrinfin119890119908119891 (119905) = 0 (55)
The system consensus state can be established by meansof the analysis of 119909119862(119905) and 119909119862(119905) From (53) and (54) 119909119862(119905)is given by
119909119862 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909119862 (0) (56)
Describing the initial state as
119909 (0) = 119909119862 (0) + 119909119862 (0)= 119901sum119892=1
120572119892 (0) 119901119892 +119899119901sum119892=119901+1
120572119892 (0) 119901119892= 119875 [1205721 (0) 120572119901 (0) 0 0]119879+ 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(57)
thus
119909119862 (0) = 119875 [1205721 (0) 120572119901 (0) 0 0]119879119909119862 (0) = 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(58)
where 120572119892(0) 119892 = 1 2 119899119901 are real constants From (58)119909119862(119905) yields119909119862 (119905) = 119875[119890
119869119862119905 00 119890119869119862119905] [1205721 (0) 120572119901 (0) 0 0]
119879 (59)
That is
119909119862 (119905) = 119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]119879
0 ] (60)
8 Mathematical Problems in Engineering
Since 119869119862 is the Jordan block of 119867 corresponding to theeigenvalues of119860+1198611198701 and considering that the pair (119860 119861) iscontrollable it can be concluded that the pair (119860 + 1198611198701 119861) isalso controllable and therefore the right choice of matrix 1198701guarantees that 119909119862(119905) achieves consensus Now 119909119888(119905) is givenby
119909119862 (119905)= 119875[119890119869119862119905 00 119890119869119862119905] [0 0 120572119901+1 (0) 120572119899119901 (0)]
119879 (61)
that yields
119909119862 (119905) = 119875[[0
119890119869119862119905 [120572119901+1 (0) 120572119899119901 (0)]119879]] (62)
And since 119869119862 is the Jordan block of 119867 corresponding tothe eigenvalues of 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 3 119899 thenit can be concluded that for system (28) to achieve consensusmatrices119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 must be Hurwitzwhich implies
lim119905997888rarrinfin119909119862 (119905) = 0 (63)
Considering (60) and (63) the system consensus value isgiven by
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin
119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ]
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1
times (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119890119908119891 (120579 minus 119891120591) 119889120579
(64)
Since it has been shown that lim119905997888rarrinfin119890119908119891(119905) = 0lim119905997888rarrinfin119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579 = 119864(65)
with a real constant vector 119864 thenlim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ] + 119864 (66)
Finally defining
[1205731 (119905) 120573119901 (119905)]119879 = 119890119869119862119905 [1205721 (0) 120572119901 (0)]119879 (67)
and considering that Lemma 4 from [7] proves that the first119901 eigenvectors of119867 are given by 119901119892 = 1119899 otimes 119888119895 for 119892 = 1 119901
1 2 3
456
Figure 1 Communication topology
where 119888119892 are the eigenvectors of 119860 + 1198611198701 and 1119899 isin R119899 is thevector with all of its entries equal to one the consensus value(66) yields
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin1119899
otimes [1198881 119888119901] [1205731 (119905) 120573119901 (119905)]119879 + 119864(68)
Remark 14 It should be noted that the previous proof isbased on the corresponding proof presented in [7] with thedifference that the proof presented in this work includes thepredicted state used in the consensus protocol which resultsin a consensus value affected by the initial injection errorsrepresented by 119864 in (68)
Remark 15 Notice that the prediction-observation schemeproposed here can compensate the time-delay of the agentswhen it is placed either at the input or at the output Inthe case of agents with input time-delay each agent willestimate its own future state and send it to its neighborswhich will use them to calculate its own control thuscompensating their input time-delay In the case where theagents present an output time-delay once again each agentwould estimate its current state from its delayed output andsend the undelayed estimated state to the other agents Inboth cases the consensus will be achieved by means of adecentralized algorithm
6 Numerical Evaluations
Numerical evaluations of the proposed solution carriedout consider two cases the Multiagent Supporting System(MASS) composed by six agents presented in [7] and a mul-tiagent system formed by six agents with unstable dynamicswhose stabilization is achieved in [31] For simplicity inboth cases the communication topology is used depicted inFigure 1 with the corresponding Laplacian matrix given by
L =[[[[[[[[[[[[
1 0 0 0 0 minus1minus1 1 0 0 0 00 minus1 2 minus1 0 00 0 0 1 minus1 00 0 0 minus1 1 0minus1 0 0 0 minus1 2
]]]]]]]]]]]]
(69)
Mathematical Problems in Engineering 9
0 t108642
minus2
0
2
4
6
x11x21x31
x41x51x61
Figure 2 Time evolution of the state MASS system 120591 = 12119904
0 t108642
minus8minus6minus4minus2024
x12x22x32
x42x52x62
Figure 3 Time evolution of the state MASS system 120591 = 12119904
Example 1 In the case of the MASS system the dynamics ofeach agent is given by
119894 (119905) = [[[0 1minus119896119898119894minus119863119898119894]]]119909119894 (119905) + [01] 119906 (119905 minus 120591119894) (70)
where 119909119894(119905) = [119911119894(119905) 119894(119905)]119879 119911119894(119905) is the height of each agent119898119894 is the mass 119863 is the damping at each agent 119896 is thestiffness and 119906119894(119905) is the control input The implementationof the predictor considers a partition of119898 = 4 and the systemparameters 119898119894 = 106 119896 = 120 and 119863 = 505 The initialconditions are set as
1199090 = [minus3 minus15 minus2 minus2 0 1 4 minus1 2 3 6 2]119879 (71)
The gain matrix for the predictor-observer is given byŁ119894 = [1 0 4 0]119879 and the consensus gain vectors 1198701 =[113208 minus02358] and 1198702 = [88687 1] The delay consid-ered is 120591 = 12119904 the results are given in Figures 2 3 4 and 5that represent the evolution in time of the state observationerrors and control signal respectively The evolution of thelogarithm of the homogeneous norm of the prediction erroris depicted in Figure 6 to show its exponential convergence Itcan be seen that with the partition of the predictor-observerlarge delays can be compensated
minus2
0
2
4
6
ew11ew21ew31
ew41ew51ew61
minus8minus6minus4minus2024
ew12ew22ew32
ew42ew52ew62
0 t108642
0 t108642
Figure 4 Time evolution of the estimation errors MASS system120591 = 12119904
minus1
0
1
2
3
4
u1u2u3
u4u5u6
0 t108642
Figure 5 Time evolution of the control signal MASS system 120591 =12119904
Example 2 In a more challenging situation an unstablesystem presented in [31] is taken into account to form amultiagent system with 119899 = 6 and the communicationtopology presented in Figure 1 The dynamics of each agentis given by
(119905) = [minus5 minus63 4 ] 119909 (119905) + [04] 119906 (119905 minus 120591)
119910 (119905) = [minus2 2] 119909 (119905) (72)
10 Mathematical Problems in Engineeringlog((e))
1
0
minus1
minus2
minus3
minus4
minus5
0 t108642
Figure 6 Time evolution of the logarithm of the prediction errorMASS system 120591 = 12119904
0 5 10 t
minus20
minus10
0
10
20
x11x21x31
x41x51x61
0 5 10 tminus20
minus10
0
10
20
x12x22x32
x42x52x62
Figure 7 Time evolution of the state unstable agents 120591 = 1119904
The delay of the system is 120591 = 1119904 the partition of theobserver is119898 = 4 and the initial conditions are set as
1199090 = [minus3 02 minus1 05 3 1 minus15 0 4 minus12 minus2 0]119879 (73)
The gain of each subpredictor is given by119871 119894 = [minus08212 07263]119879 and the control gains are1198701 = [minus05417 minus 075] and 1198702 = [minus4 03] Figures 7and 8 present the evolution in time of the state of the systemand the prediction errors respectively where after a transientperiod the desired convergence is obtained Figure 9 presentsthe evolution of the control signal The logarithm of thenorm of the prediction error is presented in Figure 10
0 5 10 tminus20
minus10
0
10
ew11ew21ew31
ew41ew51ew61
0 5 10 t
minus10
0
10
20
ew12ew22ew32
ew42ew52ew62
Figure 8 Time evolution of the estimation errors unstable agents120591 = 1119904
0 5 10 t
minus6
minus4
minus2
0
2
4
6
u1u2u3
u4u5u6
Figure 9 Time evolution of the control signal unstable agents 120591 =1119904
7 Conclusions
This work deals with the consensus problem for multiagentsystems with LTI dynamics and input time-delay A modifiedpartitioned predictor-observer is proposed to estimate thefuture state values of the agents These predicted states areused in the consensus protocol in order to compensatethe input time-delays Formal proofs for the convergenceof the predictor and consensus are given The performednumerical evaluations show that a larger number of partitions
Mathematical Problems in Engineering 11
0 5 10 t
log((e))
25
2
15
1
05
0
minus05
minus1
Figure 10 Time evolution of the logarithm of the prediction errorunstable agents 120591 = 1119904
in the predictor-observer results in an improvement of theresponse of the system and in a larger time-delay that can becompensated
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] W Ren and E Atkins ldquoDistributed multi-vehicle coordinatedcontrol via local information exchangerdquo International Journal ofRobust and Nonlinear Control vol 17 no 10-11 pp 1002ndash10332007
[2] R Olfati-Saber and R M Murray ldquoDistributed cooperativecontrol ofmultiple vehicle formations using structural potentialfunctionsrdquo IFACWorld Congress 2002
[3] J A Fax and R M Murray ldquoInformation flow and cooperativecontrol of vehicle formationsrdquo IEEE Transactions on AutomaticControl vol 49 no 9 pp 1465ndash1476 2004
[4] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[5] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbour rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[6] L Moreau ldquoConsensus and cooperation in networked multi-agent systemsrdquo IEEE Transactions onAutomatic Control vol 50no 2 pp 169ndash182 2005
[7] J Xi N Cai and Y Zhong ldquoConsensus problems for high-orderlinear time-invariant swarm systemsrdquo Physica A StatisticalMechanics and its Applications vol 389 no 24 pp 5619ndash56272010
[8] W Ren and R W BeardDistributed Consensus in Multi-VehicleCooperative Control Theory and Applications Springer-VerlagLondon UK 2008
[9] L Peng J Yingmin D Junping and Y Shiying ldquoDistributedconsensus protocol for second-order agents with fixed topology
and time-delayrdquo in Proceedings of the 26th Chinese ControlConference (CCC rsquo07) pp 577ndash581 2007
[10] Z Yan D Wu and Y Liu ldquoConsensus of discrete multiagentsystem with various time delays and environmental distur-bancesrdquo Entropy vol 16 no 12 pp 6524ndash6538 2014
[11] D Lee and M W Spong ldquoAgreement with non-uniforminformation delaysrdquo in Proceedings of the American ControlConference IEEE 2006
[12] P Lin and Y Jia ldquoConsensus of a class of second-order multi-agent systems with time-delay and jointly-connected topolo-giesrdquo IEEE Transactions on Automatic Control vol 55 no 3 pp778ndash784 2010
[13] P Lin and Y Jia ldquoConsensus of second-order discrete-timemulti-agent systems with nonuniform time-delays and dynam-ically changing topologiesrdquoAutomatica vol 49 no 5 pp 2154ndash2158 2009
[14] J Xi Z Shi and Y Zhong ldquoConsensus analysis and designfor high-order linear swarm systems with time-varying delaysrdquoPhysicaA StatisticalMechanics and its Applications vol 390 no23-24 pp 4114ndash4123 2011
[15] J Xi Z Wang G Liu and Y Zhong ldquoConsensus problems forlinear time-varying swarm systemswith topology variances andmultiple time delaysrdquo in Proceedings of the 2013 32nd ChineseControl Conference (CCC rsquo13) pp 192ndash198 2013
[16] X Luo X Li S Li and X Guan ldquoConsensus for linear multi-agent systems with constant and time-varying communicationdelays via delay-decomposition approachrdquo in Proceedings of the11th World Congress on Intelligent Control and Automation pp353ndash358 2014
[17] Y Cao T Oguchi P Verhoeckx and H Nijmeijer ldquoConsensuscontrol for a multiagent systemwith time delaysrdquoMathematicalProblems in Engineering vol 2017 Article ID 4063184 11 pages2017
[18] S Mehra and S R Sahoo ldquoTrajectory tracking with input delayinmulti-agent system Double integrator caserdquo in Proceedings ofthe 2016 International Conference onUnmannedAircraft Systems(ICUAS rsquo16) pp 387ndash393 2016
[19] S Mehra A Sen and S R Sahoo ldquoTrajectory tracking inheterogeneous multi-agent system without and with inputdelayrdquo in Proceedings of the 2017 Indian Control Conference (ICCrsquo17) pp 338ndash343 2017
[20] B Zhou and Z Lin ldquoConsensus of high-order multi-agent sys-tems with large input and communication delaysrdquo Automaticavol 50 no 2 pp 452ndash464 2014
[21] C Wang Z Zuo Z Lin and Z Ding ldquoA truncated predictionapproach to consensus control of lipschitz nonlinearmultiagentsystems with input delayrdquo IEEE Transactions on Control ofNetwork Systems vol 4 no 4 pp 716ndash724 2017
[22] P Shi and Q K Shen ldquoObserver-based leader-following con-sensus of uncertain nonlinear multi-agent systemsrdquo Interna-tional Journal of Robust and Nonlinear Control 2017
[23] O J M Smith ldquoCloser control of loops with deadtimerdquoChemical Engineering Progress vol 53 no 5 pp 217ndash219 1957
[24] K Watanabe and M Ito ldquoA process-model control for linearsystems with delayrdquo IEEE Transactions on Automatic Controlvol 26 no 6 pp 1261ndash1269 1981
[25] W Michiels and D Roose ldquoTime-delay compensation inunstable plants using delayed state feedbackrdquo in Proceedings ofthe 40th IEEE Conference on Decision and Control rsquo01 vol 2 pp1433ndash1437 IEEE 2001
12 Mathematical Problems in Engineering
[26] A Manitius and A W Olbrot ldquoFinite spectrum assignmentproblem for systems with delaysrdquo IEEE Transactions on Auto-matic Control vol 24 no 4 pp 541ndash553 1979
[27] Z Artstein ldquoLinear systems with delayed controls a reductionrdquoIEEE Transactions on Automatic Control vol 27 no 4 pp 869ndash879 1982
[28] L Mirkin and N Raskin ldquoEvery stabilizing dead-time con-troller has an observerndashpredictor-based structurerdquo Automaticavol 39 no 10 pp 1747ndash1754 2003
[29] S Mondie and W Michiels ldquoFinite spectrum assignment ofunstable time-delay systems with a safe implementationrdquo IEEETransactions on Automatic Control vol 48 no 12 pp 2207ndash2212 2003
[30] B Zhou ldquoInput delay compensation of linear systems with bothstate and input delays by nested predictionrdquoAutomatica vol 50no 5 pp 1434ndash1443 2014
[31] M Najafi S Hosseinnia F Sheikholeslam and M KarimadinildquoClosed-loop control of dead time systems via sequential sub-predictorsrdquo International Journal of Control vol 86 no 4 pp599ndash609 2013
[32] F Sheikholeslam S Hosseinnia M Najafi and Q WangldquoRobust H infin control of single input-delay systems based onsequential sub-predictorsrdquo IET Control Theory amp Applicationsvol 8 no 13 pp 1175ndash1184 2014
[33] F Cacace F Conte A Germani and G Palombo ldquoOptimalcontrol of linear systems with large and variable input delaysrdquoSystems amp Control Letters vol 89 pp 1ndash7 2016
[34] F Cacace A Germani and C Manes ldquoPredictor-based controlof linear systems with large and variable measurement delaysrdquoInternational Journal of Control vol 87 no 4 pp 704ndash714 2014
[35] F Mazenc and M Malisoff ldquoStabilization and robustness anal-ysis for time-varying systems with time-varying delays usinga sequential subpredictors approachrdquo Automatica vol 82 pp118ndash127 2017
[36] A Germani C Manes and P Pepe ldquoA new approach to stateobservation of nonlinear systems with delayed outputrdquo Instituteof Electrical andElectronics Engineers Transactions onAutomaticControl vol 47 no 1 pp 96ndash101 2002
[37] M Velasco-Villa J Heras-Godınez J A Vazquez-Santacruzand V Fragoso-Rubio ldquoDelayed consensus problem for singleand double integrator systemsrdquo Mathematical Problems inEngineering vol 2015 Article ID 461098 15 pages 2015
[38] V Fragoso-Rubio M Velasco-Villa and M A Hernandez-Perez ldquoConsensus problem for linear time invariant systemswith time-delayrdquo in Proceedings of the National Conference ofAutomatic Control rsquo17 pp 90ndash95 2017
[39] C Godsil and G Royle Algebraic Graph Theory Springer NewYork NY USA 2001
[40] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[41] W Michiels K Engelborghs P Vansevenant and D RooseldquoContinuous pole placement for delay equationsrdquo Automaticavol 38 no 5 pp 747ndash761 2002
[42] K Gu V L Kharitonov and J Chen Stability of Time-DelaySystems Birkhauser 2003
[43] R E Bellman and K L Cooke Differential-Difference Equa-tions Rand Corporation 1963
[44] I Estrada-Sanchez M Velasco-Villa and H Rodrıguez-CortesldquoPrediction-based control for nonlinear systems with inputdelayrdquoMathematical Problems in Engineering vol 2017 ArticleID 7415418 11 pages 2017
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

6 Mathematical Problems in Engineering
The following control scheme based on the predictor-observer (7) is proposed
119906119894 (119905) = 1198701119908119894119898 (119905) + 1198702 119899sum119895=1
119897119894119895 (119908119895119898 (119905) minus 119908119894119898 (119905)) (30)
for 119894 119895 = 1 2 119899 1198701 1198702 isin R119902times119901 where 119897119894119895 are theentries of the Laplacian matrix of the graph The controlscheme (30) can be rewritten as
119906 (119905) = (119868119899 otimes 1198701 minusL otimes 1198702) 119908119898 (119905) (31)
whereL isin R119899times119899 is the Laplacian of the system and119908119898 =[1199081119898 119908119899119898]119879 is the predicted stateThe closed-loop system (29)ndash(31) is given by
(119905) = (119868119899 otimes 119860) 119909 (119905)+ (119868119899 otimes 119861) (119868119899 otimes 1198701 minusL otimes 1198702) 119908119898 (119905 minus 120591) (32)
Considering that (119860otimes119861)(119862otimes119863) = 119860119862otimes119861119863 it is obtainedthat
(119905) = (119868119899 otimes 119860) 119909 (119905)+ (119868119899 otimes 1198611198701 minusL otimes 1198611198702) 119908119898 (119905 minus 120591) (33)
Recalling the observation errors
1198901199081 (119905) = 119909 (119905 + 120591) minus 1199081 (119905) 119890119908119891 (119905) = 119908119891minus1 (119905 + 120591) minus 119908119891 (119905) for 119891 = 2 3 119898 (34)
the estimated state119908119898(119905minus120591) can be rewritten as a function ofthe real state and the observation errors
119908119898 (119905 minus 120591) = 119909 (119905) minus 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (35)
where 119890119908119891 = [1198901199081119891 119890119908119899119891]119879 producing (119905) = 119867119909 (119905)
+ (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (36)
where119867 = (119868119899 otimes (119860 + 1198611198701) minusL otimes 1198611198702)Consider now a nonsingular matrix 119880 isin R119899times119899 such that
119880minus1L119880 = 119869L (37)
for 119869L isin R119899times119899 representing the Jordan canonical form of theLaplacian matrixL
Considering now the globally invertible change of vari-able
119909 = (119880minus1 otimes 119868119902) 119909 119909 = (119880 otimes 119868119902) 119909 (38)
for 119909 = [1199091 1199092 119909119899]119879 then it is possible to show that
(119880 otimes 119868119902) (119905)= [119868119899 otimes (119860 + 1198611198701)] (119880 otimes 119868119902) 119909 (119905)minus (L otimes 1198611198702) (119880 otimes 119868119902) 119909 (119905)+ [L otimes 1198611198702 minus 119868119899 otimes 1198611198701] 119898sum
119891=1
119890119908119891 (119905 minus 119891120591)(39)
from where
(119905)= [119868119899 otimes (119860 + 1198611198701) minus 119869119871 otimes 1198611198702] 119909 (119905)+ [119880minus1L otimes 1198611198702 minus 119880minus1 otimes 1198611198701] 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (40)
Equation (40) can be rewritten as
(119905) = Γ119909 (119905) + Δ 119898sum119891=1
119890119908119891 (119905 minus 119891120591) (41)
where
Δ = 119880minus1L otimes 1198611198702 minus 119880minus1 otimes 1198611198701 (42)
Γ =[[[[[[[[[[
119860 + 1198611198701 0 0 sdot sdot sdot 00 1205742 1205751198611198702 sdot sdot sdot 0 d d
0 0 sdot sdot sdot 120574119899minus1 12057511986111987020 0 sdot sdot sdot 0 120574119899
]]]]]]]]]]
(43)
with 120574119894 = 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 119899 and 120575 = 0 or120575 = 1 depending on the structure of 119869119871Remark 12 Notice that since 119867 and Γ are similar matricesthey have the same eigenvalues Furthermore in (43) it can beseen that those eigenvalues correspond to the ones of119860+1198611198701and 119860 + 1198611198701 minus 1205821198941198611198702 for 119894 = 2 3 11989951 Consensus Analysis
Lemma 13 Consider a set of 119899 agents of the form (28)with a communication topology with a directed spanning treeUnder these circumstances solution to the consensus problemis achieved if and only if the matrices 119860 + 1198611198701 minus 1205821198711198941198611198702 for119894 = 2 3 119899 are HurwitzProof Let the invertible matrix 119875 = [1199011 1199012 119901119899119901] isinC119899119901times119899119901 be such that
119875minus1119867119875 = 119869119867 (44)
Mathematical Problems in Engineering 7
with 119869119867 being the Jordan canonical formof119867 defined in (36)Considering the change of coordinates
119909 = 119875minus1119909 119909 = 119875119909 (45)
(36) yields
119909 = 119875minus1119867119875119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (46)
That is119909 = 119869119867119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (47)
The solution to system (47) is given by
119909 (119905) = 119890119869119867119905119909 (0)+ 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(48)
Since 119909 = 119875minus1119909 it is possible to write119909 (119905) = 119875119890119869119867119905119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(49)
Let 119867 isin R119899119901times119899119901 with eigenvectors 119901119892 isin C (119892 =1 2 119899119901) Note from Remark 12 that 119901119892 (119892 = 1 2 119899)correspond to the eigenvalues of119860+1198611198701 while eigenvectors119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) correspond to the eigenvalues of119860 + 1198611198701 minus 1205821198711198941198611198702 119894 = 2 3 119899 Then two consensus sub-spaces can be established subspaceC(119867) spanned by119901119892 (119892 =1 2 119899) and a complementary consensus subspace C(119867)spanned by 119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) Therefore theconsensus spaceC119899119901 is given by
C119899119901 = C oplusC (50)
Since the eigenvalues of119867 correspond to the eigenvaluesof119860+1198611198701 and119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 matrix 119890119869119867119905can be written as
119890119869119867119905 = [119890119869119862119905 00 119890119869119862119905] (51)
defining
119909 (0) = 119909119862 (0) + 119909119862 (0) (52)
Equation (49) can now be rewritten as
119909 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579
(53)
Considering that the solution of the closed-loop system(53) can be expressed as
119909 (119905) = 119909119862 (119905) + 119909119862 (119905)+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(54)
and noting that the limit when 119905 997888rarr infin of the third term in(54) is a constant value thus
lim119905997888rarrinfin119890119908119891 (119905) = 0 (55)
The system consensus state can be established by meansof the analysis of 119909119862(119905) and 119909119862(119905) From (53) and (54) 119909119862(119905)is given by
119909119862 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909119862 (0) (56)
Describing the initial state as
119909 (0) = 119909119862 (0) + 119909119862 (0)= 119901sum119892=1
120572119892 (0) 119901119892 +119899119901sum119892=119901+1
120572119892 (0) 119901119892= 119875 [1205721 (0) 120572119901 (0) 0 0]119879+ 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(57)
thus
119909119862 (0) = 119875 [1205721 (0) 120572119901 (0) 0 0]119879119909119862 (0) = 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(58)
where 120572119892(0) 119892 = 1 2 119899119901 are real constants From (58)119909119862(119905) yields119909119862 (119905) = 119875[119890
119869119862119905 00 119890119869119862119905] [1205721 (0) 120572119901 (0) 0 0]
119879 (59)
That is
119909119862 (119905) = 119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]119879
0 ] (60)
8 Mathematical Problems in Engineering
Since 119869119862 is the Jordan block of 119867 corresponding to theeigenvalues of119860+1198611198701 and considering that the pair (119860 119861) iscontrollable it can be concluded that the pair (119860 + 1198611198701 119861) isalso controllable and therefore the right choice of matrix 1198701guarantees that 119909119862(119905) achieves consensus Now 119909119888(119905) is givenby
119909119862 (119905)= 119875[119890119869119862119905 00 119890119869119862119905] [0 0 120572119901+1 (0) 120572119899119901 (0)]
119879 (61)
that yields
119909119862 (119905) = 119875[[0
119890119869119862119905 [120572119901+1 (0) 120572119899119901 (0)]119879]] (62)
And since 119869119862 is the Jordan block of 119867 corresponding tothe eigenvalues of 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 3 119899 thenit can be concluded that for system (28) to achieve consensusmatrices119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 must be Hurwitzwhich implies
lim119905997888rarrinfin119909119862 (119905) = 0 (63)
Considering (60) and (63) the system consensus value isgiven by
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin
119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ]
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1
times (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119890119908119891 (120579 minus 119891120591) 119889120579
(64)
Since it has been shown that lim119905997888rarrinfin119890119908119891(119905) = 0lim119905997888rarrinfin119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579 = 119864(65)
with a real constant vector 119864 thenlim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ] + 119864 (66)
Finally defining
[1205731 (119905) 120573119901 (119905)]119879 = 119890119869119862119905 [1205721 (0) 120572119901 (0)]119879 (67)
and considering that Lemma 4 from [7] proves that the first119901 eigenvectors of119867 are given by 119901119892 = 1119899 otimes 119888119895 for 119892 = 1 119901
1 2 3
456
Figure 1 Communication topology
where 119888119892 are the eigenvectors of 119860 + 1198611198701 and 1119899 isin R119899 is thevector with all of its entries equal to one the consensus value(66) yields
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin1119899
otimes [1198881 119888119901] [1205731 (119905) 120573119901 (119905)]119879 + 119864(68)
Remark 14 It should be noted that the previous proof isbased on the corresponding proof presented in [7] with thedifference that the proof presented in this work includes thepredicted state used in the consensus protocol which resultsin a consensus value affected by the initial injection errorsrepresented by 119864 in (68)
Remark 15 Notice that the prediction-observation schemeproposed here can compensate the time-delay of the agentswhen it is placed either at the input or at the output Inthe case of agents with input time-delay each agent willestimate its own future state and send it to its neighborswhich will use them to calculate its own control thuscompensating their input time-delay In the case where theagents present an output time-delay once again each agentwould estimate its current state from its delayed output andsend the undelayed estimated state to the other agents Inboth cases the consensus will be achieved by means of adecentralized algorithm
6 Numerical Evaluations
Numerical evaluations of the proposed solution carriedout consider two cases the Multiagent Supporting System(MASS) composed by six agents presented in [7] and a mul-tiagent system formed by six agents with unstable dynamicswhose stabilization is achieved in [31] For simplicity inboth cases the communication topology is used depicted inFigure 1 with the corresponding Laplacian matrix given by
L =[[[[[[[[[[[[
1 0 0 0 0 minus1minus1 1 0 0 0 00 minus1 2 minus1 0 00 0 0 1 minus1 00 0 0 minus1 1 0minus1 0 0 0 minus1 2
]]]]]]]]]]]]
(69)
Mathematical Problems in Engineering 9
0 t108642
minus2
0
2
4
6
x11x21x31
x41x51x61
Figure 2 Time evolution of the state MASS system 120591 = 12119904
0 t108642
minus8minus6minus4minus2024
x12x22x32
x42x52x62
Figure 3 Time evolution of the state MASS system 120591 = 12119904
Example 1 In the case of the MASS system the dynamics ofeach agent is given by
119894 (119905) = [[[0 1minus119896119898119894minus119863119898119894]]]119909119894 (119905) + [01] 119906 (119905 minus 120591119894) (70)
where 119909119894(119905) = [119911119894(119905) 119894(119905)]119879 119911119894(119905) is the height of each agent119898119894 is the mass 119863 is the damping at each agent 119896 is thestiffness and 119906119894(119905) is the control input The implementationof the predictor considers a partition of119898 = 4 and the systemparameters 119898119894 = 106 119896 = 120 and 119863 = 505 The initialconditions are set as
1199090 = [minus3 minus15 minus2 minus2 0 1 4 minus1 2 3 6 2]119879 (71)
The gain matrix for the predictor-observer is given byŁ119894 = [1 0 4 0]119879 and the consensus gain vectors 1198701 =[113208 minus02358] and 1198702 = [88687 1] The delay consid-ered is 120591 = 12119904 the results are given in Figures 2 3 4 and 5that represent the evolution in time of the state observationerrors and control signal respectively The evolution of thelogarithm of the homogeneous norm of the prediction erroris depicted in Figure 6 to show its exponential convergence Itcan be seen that with the partition of the predictor-observerlarge delays can be compensated
minus2
0
2
4
6
ew11ew21ew31
ew41ew51ew61
minus8minus6minus4minus2024
ew12ew22ew32
ew42ew52ew62
0 t108642
0 t108642
Figure 4 Time evolution of the estimation errors MASS system120591 = 12119904
minus1
0
1
2
3
4
u1u2u3
u4u5u6
0 t108642
Figure 5 Time evolution of the control signal MASS system 120591 =12119904
Example 2 In a more challenging situation an unstablesystem presented in [31] is taken into account to form amultiagent system with 119899 = 6 and the communicationtopology presented in Figure 1 The dynamics of each agentis given by
(119905) = [minus5 minus63 4 ] 119909 (119905) + [04] 119906 (119905 minus 120591)
119910 (119905) = [minus2 2] 119909 (119905) (72)
10 Mathematical Problems in Engineeringlog((e))
1
0
minus1
minus2
minus3
minus4
minus5
0 t108642
Figure 6 Time evolution of the logarithm of the prediction errorMASS system 120591 = 12119904
0 5 10 t
minus20
minus10
0
10
20
x11x21x31
x41x51x61
0 5 10 tminus20
minus10
0
10
20
x12x22x32
x42x52x62
Figure 7 Time evolution of the state unstable agents 120591 = 1119904
The delay of the system is 120591 = 1119904 the partition of theobserver is119898 = 4 and the initial conditions are set as
1199090 = [minus3 02 minus1 05 3 1 minus15 0 4 minus12 minus2 0]119879 (73)
The gain of each subpredictor is given by119871 119894 = [minus08212 07263]119879 and the control gains are1198701 = [minus05417 minus 075] and 1198702 = [minus4 03] Figures 7and 8 present the evolution in time of the state of the systemand the prediction errors respectively where after a transientperiod the desired convergence is obtained Figure 9 presentsthe evolution of the control signal The logarithm of thenorm of the prediction error is presented in Figure 10
0 5 10 tminus20
minus10
0
10
ew11ew21ew31
ew41ew51ew61
0 5 10 t
minus10
0
10
20
ew12ew22ew32
ew42ew52ew62
Figure 8 Time evolution of the estimation errors unstable agents120591 = 1119904
0 5 10 t
minus6
minus4
minus2
0
2
4
6
u1u2u3
u4u5u6
Figure 9 Time evolution of the control signal unstable agents 120591 =1119904
7 Conclusions
This work deals with the consensus problem for multiagentsystems with LTI dynamics and input time-delay A modifiedpartitioned predictor-observer is proposed to estimate thefuture state values of the agents These predicted states areused in the consensus protocol in order to compensatethe input time-delays Formal proofs for the convergenceof the predictor and consensus are given The performednumerical evaluations show that a larger number of partitions
Mathematical Problems in Engineering 11
0 5 10 t
log((e))
25
2
15
1
05
0
minus05
minus1
Figure 10 Time evolution of the logarithm of the prediction errorunstable agents 120591 = 1119904
in the predictor-observer results in an improvement of theresponse of the system and in a larger time-delay that can becompensated
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] W Ren and E Atkins ldquoDistributed multi-vehicle coordinatedcontrol via local information exchangerdquo International Journal ofRobust and Nonlinear Control vol 17 no 10-11 pp 1002ndash10332007
[2] R Olfati-Saber and R M Murray ldquoDistributed cooperativecontrol ofmultiple vehicle formations using structural potentialfunctionsrdquo IFACWorld Congress 2002
[3] J A Fax and R M Murray ldquoInformation flow and cooperativecontrol of vehicle formationsrdquo IEEE Transactions on AutomaticControl vol 49 no 9 pp 1465ndash1476 2004
[4] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[5] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbour rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[6] L Moreau ldquoConsensus and cooperation in networked multi-agent systemsrdquo IEEE Transactions onAutomatic Control vol 50no 2 pp 169ndash182 2005
[7] J Xi N Cai and Y Zhong ldquoConsensus problems for high-orderlinear time-invariant swarm systemsrdquo Physica A StatisticalMechanics and its Applications vol 389 no 24 pp 5619ndash56272010
[8] W Ren and R W BeardDistributed Consensus in Multi-VehicleCooperative Control Theory and Applications Springer-VerlagLondon UK 2008
[9] L Peng J Yingmin D Junping and Y Shiying ldquoDistributedconsensus protocol for second-order agents with fixed topology
and time-delayrdquo in Proceedings of the 26th Chinese ControlConference (CCC rsquo07) pp 577ndash581 2007
[10] Z Yan D Wu and Y Liu ldquoConsensus of discrete multiagentsystem with various time delays and environmental distur-bancesrdquo Entropy vol 16 no 12 pp 6524ndash6538 2014
[11] D Lee and M W Spong ldquoAgreement with non-uniforminformation delaysrdquo in Proceedings of the American ControlConference IEEE 2006
[12] P Lin and Y Jia ldquoConsensus of a class of second-order multi-agent systems with time-delay and jointly-connected topolo-giesrdquo IEEE Transactions on Automatic Control vol 55 no 3 pp778ndash784 2010
[13] P Lin and Y Jia ldquoConsensus of second-order discrete-timemulti-agent systems with nonuniform time-delays and dynam-ically changing topologiesrdquoAutomatica vol 49 no 5 pp 2154ndash2158 2009
[14] J Xi Z Shi and Y Zhong ldquoConsensus analysis and designfor high-order linear swarm systems with time-varying delaysrdquoPhysicaA StatisticalMechanics and its Applications vol 390 no23-24 pp 4114ndash4123 2011
[15] J Xi Z Wang G Liu and Y Zhong ldquoConsensus problems forlinear time-varying swarm systemswith topology variances andmultiple time delaysrdquo in Proceedings of the 2013 32nd ChineseControl Conference (CCC rsquo13) pp 192ndash198 2013
[16] X Luo X Li S Li and X Guan ldquoConsensus for linear multi-agent systems with constant and time-varying communicationdelays via delay-decomposition approachrdquo in Proceedings of the11th World Congress on Intelligent Control and Automation pp353ndash358 2014
[17] Y Cao T Oguchi P Verhoeckx and H Nijmeijer ldquoConsensuscontrol for a multiagent systemwith time delaysrdquoMathematicalProblems in Engineering vol 2017 Article ID 4063184 11 pages2017
[18] S Mehra and S R Sahoo ldquoTrajectory tracking with input delayinmulti-agent system Double integrator caserdquo in Proceedings ofthe 2016 International Conference onUnmannedAircraft Systems(ICUAS rsquo16) pp 387ndash393 2016
[19] S Mehra A Sen and S R Sahoo ldquoTrajectory tracking inheterogeneous multi-agent system without and with inputdelayrdquo in Proceedings of the 2017 Indian Control Conference (ICCrsquo17) pp 338ndash343 2017
[20] B Zhou and Z Lin ldquoConsensus of high-order multi-agent sys-tems with large input and communication delaysrdquo Automaticavol 50 no 2 pp 452ndash464 2014
[21] C Wang Z Zuo Z Lin and Z Ding ldquoA truncated predictionapproach to consensus control of lipschitz nonlinearmultiagentsystems with input delayrdquo IEEE Transactions on Control ofNetwork Systems vol 4 no 4 pp 716ndash724 2017
[22] P Shi and Q K Shen ldquoObserver-based leader-following con-sensus of uncertain nonlinear multi-agent systemsrdquo Interna-tional Journal of Robust and Nonlinear Control 2017
[23] O J M Smith ldquoCloser control of loops with deadtimerdquoChemical Engineering Progress vol 53 no 5 pp 217ndash219 1957
[24] K Watanabe and M Ito ldquoA process-model control for linearsystems with delayrdquo IEEE Transactions on Automatic Controlvol 26 no 6 pp 1261ndash1269 1981
[25] W Michiels and D Roose ldquoTime-delay compensation inunstable plants using delayed state feedbackrdquo in Proceedings ofthe 40th IEEE Conference on Decision and Control rsquo01 vol 2 pp1433ndash1437 IEEE 2001
12 Mathematical Problems in Engineering
[26] A Manitius and A W Olbrot ldquoFinite spectrum assignmentproblem for systems with delaysrdquo IEEE Transactions on Auto-matic Control vol 24 no 4 pp 541ndash553 1979
[27] Z Artstein ldquoLinear systems with delayed controls a reductionrdquoIEEE Transactions on Automatic Control vol 27 no 4 pp 869ndash879 1982
[28] L Mirkin and N Raskin ldquoEvery stabilizing dead-time con-troller has an observerndashpredictor-based structurerdquo Automaticavol 39 no 10 pp 1747ndash1754 2003
[29] S Mondie and W Michiels ldquoFinite spectrum assignment ofunstable time-delay systems with a safe implementationrdquo IEEETransactions on Automatic Control vol 48 no 12 pp 2207ndash2212 2003
[30] B Zhou ldquoInput delay compensation of linear systems with bothstate and input delays by nested predictionrdquoAutomatica vol 50no 5 pp 1434ndash1443 2014
[31] M Najafi S Hosseinnia F Sheikholeslam and M KarimadinildquoClosed-loop control of dead time systems via sequential sub-predictorsrdquo International Journal of Control vol 86 no 4 pp599ndash609 2013
[32] F Sheikholeslam S Hosseinnia M Najafi and Q WangldquoRobust H infin control of single input-delay systems based onsequential sub-predictorsrdquo IET Control Theory amp Applicationsvol 8 no 13 pp 1175ndash1184 2014
[33] F Cacace F Conte A Germani and G Palombo ldquoOptimalcontrol of linear systems with large and variable input delaysrdquoSystems amp Control Letters vol 89 pp 1ndash7 2016
[34] F Cacace A Germani and C Manes ldquoPredictor-based controlof linear systems with large and variable measurement delaysrdquoInternational Journal of Control vol 87 no 4 pp 704ndash714 2014
[35] F Mazenc and M Malisoff ldquoStabilization and robustness anal-ysis for time-varying systems with time-varying delays usinga sequential subpredictors approachrdquo Automatica vol 82 pp118ndash127 2017
[36] A Germani C Manes and P Pepe ldquoA new approach to stateobservation of nonlinear systems with delayed outputrdquo Instituteof Electrical andElectronics Engineers Transactions onAutomaticControl vol 47 no 1 pp 96ndash101 2002
[37] M Velasco-Villa J Heras-Godınez J A Vazquez-Santacruzand V Fragoso-Rubio ldquoDelayed consensus problem for singleand double integrator systemsrdquo Mathematical Problems inEngineering vol 2015 Article ID 461098 15 pages 2015
[38] V Fragoso-Rubio M Velasco-Villa and M A Hernandez-Perez ldquoConsensus problem for linear time invariant systemswith time-delayrdquo in Proceedings of the National Conference ofAutomatic Control rsquo17 pp 90ndash95 2017
[39] C Godsil and G Royle Algebraic Graph Theory Springer NewYork NY USA 2001
[40] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[41] W Michiels K Engelborghs P Vansevenant and D RooseldquoContinuous pole placement for delay equationsrdquo Automaticavol 38 no 5 pp 747ndash761 2002
[42] K Gu V L Kharitonov and J Chen Stability of Time-DelaySystems Birkhauser 2003
[43] R E Bellman and K L Cooke Differential-Difference Equa-tions Rand Corporation 1963
[44] I Estrada-Sanchez M Velasco-Villa and H Rodrıguez-CortesldquoPrediction-based control for nonlinear systems with inputdelayrdquoMathematical Problems in Engineering vol 2017 ArticleID 7415418 11 pages 2017
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 7
with 119869119867 being the Jordan canonical formof119867 defined in (36)Considering the change of coordinates
119909 = 119875minus1119909 119909 = 119875119909 (45)
(36) yields
119909 = 119875minus1119867119875119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (46)
That is119909 = 119869119867119909+ 119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119898sum
119891=1
119890119908119891 (119905 minus 119891120591) (47)
The solution to system (47) is given by
119909 (119905) = 119890119869119867119905119909 (0)+ 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(48)
Since 119909 = 119875minus1119909 it is possible to write119909 (119905) = 119875119890119869119867119905119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(49)
Let 119867 isin R119899119901times119899119901 with eigenvectors 119901119892 isin C (119892 =1 2 119899119901) Note from Remark 12 that 119901119892 (119892 = 1 2 119899)correspond to the eigenvalues of119860+1198611198701 while eigenvectors119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) correspond to the eigenvalues of119860 + 1198611198701 minus 1205821198711198941198611198702 119894 = 2 3 119899 Then two consensus sub-spaces can be established subspaceC(119867) spanned by119901119892 (119892 =1 2 119899) and a complementary consensus subspace C(119867)spanned by 119901119892 (119892 = 119899 + 1 119899 + 2 119899119901) Therefore theconsensus spaceC119899119901 is given by
C119899119901 = C oplusC (50)
Since the eigenvalues of119867 correspond to the eigenvaluesof119860+1198611198701 and119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 matrix 119890119869119867119905can be written as
119890119869119867119905 = [119890119869119862119905 00 119890119869119862119905] (51)
defining
119909 (0) = 119909119862 (0) + 119909119862 (0) (52)
Equation (49) can now be rewritten as
119909 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909 (0)
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579
(53)
Considering that the solution of the closed-loop system(53) can be expressed as
119909 (119905) = 119909119862 (119905) + 119909119862 (119905)+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579(54)
and noting that the limit when 119905 997888rarr infin of the third term in(54) is a constant value thus
lim119905997888rarrinfin119890119908119891 (119905) = 0 (55)
The system consensus state can be established by meansof the analysis of 119909119862(119905) and 119909119862(119905) From (53) and (54) 119909119862(119905)is given by
119909119862 (119905) = 119875[119890119869119862119905 00 119890119869119862119905]119875minus1119909119862 (0) (56)
Describing the initial state as
119909 (0) = 119909119862 (0) + 119909119862 (0)= 119901sum119892=1
120572119892 (0) 119901119892 +119899119901sum119892=119901+1
120572119892 (0) 119901119892= 119875 [1205721 (0) 120572119901 (0) 0 0]119879+ 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(57)
thus
119909119862 (0) = 119875 [1205721 (0) 120572119901 (0) 0 0]119879119909119862 (0) = 119875 [0 0 120572119901+1 (0) 120572119899119901 (0)]119879
(58)
where 120572119892(0) 119892 = 1 2 119899119901 are real constants From (58)119909119862(119905) yields119909119862 (119905) = 119875[119890
119869119862119905 00 119890119869119862119905] [1205721 (0) 120572119901 (0) 0 0]
119879 (59)
That is
119909119862 (119905) = 119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]119879
0 ] (60)
8 Mathematical Problems in Engineering
Since 119869119862 is the Jordan block of 119867 corresponding to theeigenvalues of119860+1198611198701 and considering that the pair (119860 119861) iscontrollable it can be concluded that the pair (119860 + 1198611198701 119861) isalso controllable and therefore the right choice of matrix 1198701guarantees that 119909119862(119905) achieves consensus Now 119909119888(119905) is givenby
119909119862 (119905)= 119875[119890119869119862119905 00 119890119869119862119905] [0 0 120572119901+1 (0) 120572119899119901 (0)]
119879 (61)
that yields
119909119862 (119905) = 119875[[0
119890119869119862119905 [120572119901+1 (0) 120572119899119901 (0)]119879]] (62)
And since 119869119862 is the Jordan block of 119867 corresponding tothe eigenvalues of 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 3 119899 thenit can be concluded that for system (28) to achieve consensusmatrices119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 must be Hurwitzwhich implies
lim119905997888rarrinfin119909119862 (119905) = 0 (63)
Considering (60) and (63) the system consensus value isgiven by
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin
119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ]
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1
times (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119890119908119891 (120579 minus 119891120591) 119889120579
(64)
Since it has been shown that lim119905997888rarrinfin119890119908119891(119905) = 0lim119905997888rarrinfin119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579 = 119864(65)
with a real constant vector 119864 thenlim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ] + 119864 (66)
Finally defining
[1205731 (119905) 120573119901 (119905)]119879 = 119890119869119862119905 [1205721 (0) 120572119901 (0)]119879 (67)
and considering that Lemma 4 from [7] proves that the first119901 eigenvectors of119867 are given by 119901119892 = 1119899 otimes 119888119895 for 119892 = 1 119901
1 2 3
456
Figure 1 Communication topology
where 119888119892 are the eigenvectors of 119860 + 1198611198701 and 1119899 isin R119899 is thevector with all of its entries equal to one the consensus value(66) yields
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin1119899
otimes [1198881 119888119901] [1205731 (119905) 120573119901 (119905)]119879 + 119864(68)
Remark 14 It should be noted that the previous proof isbased on the corresponding proof presented in [7] with thedifference that the proof presented in this work includes thepredicted state used in the consensus protocol which resultsin a consensus value affected by the initial injection errorsrepresented by 119864 in (68)
Remark 15 Notice that the prediction-observation schemeproposed here can compensate the time-delay of the agentswhen it is placed either at the input or at the output Inthe case of agents with input time-delay each agent willestimate its own future state and send it to its neighborswhich will use them to calculate its own control thuscompensating their input time-delay In the case where theagents present an output time-delay once again each agentwould estimate its current state from its delayed output andsend the undelayed estimated state to the other agents Inboth cases the consensus will be achieved by means of adecentralized algorithm
6 Numerical Evaluations
Numerical evaluations of the proposed solution carriedout consider two cases the Multiagent Supporting System(MASS) composed by six agents presented in [7] and a mul-tiagent system formed by six agents with unstable dynamicswhose stabilization is achieved in [31] For simplicity inboth cases the communication topology is used depicted inFigure 1 with the corresponding Laplacian matrix given by
L =[[[[[[[[[[[[
1 0 0 0 0 minus1minus1 1 0 0 0 00 minus1 2 minus1 0 00 0 0 1 minus1 00 0 0 minus1 1 0minus1 0 0 0 minus1 2
]]]]]]]]]]]]
(69)
Mathematical Problems in Engineering 9
0 t108642
minus2
0
2
4
6
x11x21x31
x41x51x61
Figure 2 Time evolution of the state MASS system 120591 = 12119904
0 t108642
minus8minus6minus4minus2024
x12x22x32
x42x52x62
Figure 3 Time evolution of the state MASS system 120591 = 12119904
Example 1 In the case of the MASS system the dynamics ofeach agent is given by
119894 (119905) = [[[0 1minus119896119898119894minus119863119898119894]]]119909119894 (119905) + [01] 119906 (119905 minus 120591119894) (70)
where 119909119894(119905) = [119911119894(119905) 119894(119905)]119879 119911119894(119905) is the height of each agent119898119894 is the mass 119863 is the damping at each agent 119896 is thestiffness and 119906119894(119905) is the control input The implementationof the predictor considers a partition of119898 = 4 and the systemparameters 119898119894 = 106 119896 = 120 and 119863 = 505 The initialconditions are set as
1199090 = [minus3 minus15 minus2 minus2 0 1 4 minus1 2 3 6 2]119879 (71)
The gain matrix for the predictor-observer is given byŁ119894 = [1 0 4 0]119879 and the consensus gain vectors 1198701 =[113208 minus02358] and 1198702 = [88687 1] The delay consid-ered is 120591 = 12119904 the results are given in Figures 2 3 4 and 5that represent the evolution in time of the state observationerrors and control signal respectively The evolution of thelogarithm of the homogeneous norm of the prediction erroris depicted in Figure 6 to show its exponential convergence Itcan be seen that with the partition of the predictor-observerlarge delays can be compensated
minus2
0
2
4
6
ew11ew21ew31
ew41ew51ew61
minus8minus6minus4minus2024
ew12ew22ew32
ew42ew52ew62
0 t108642
0 t108642
Figure 4 Time evolution of the estimation errors MASS system120591 = 12119904
minus1
0
1
2
3
4
u1u2u3
u4u5u6
0 t108642
Figure 5 Time evolution of the control signal MASS system 120591 =12119904
Example 2 In a more challenging situation an unstablesystem presented in [31] is taken into account to form amultiagent system with 119899 = 6 and the communicationtopology presented in Figure 1 The dynamics of each agentis given by
(119905) = [minus5 minus63 4 ] 119909 (119905) + [04] 119906 (119905 minus 120591)
119910 (119905) = [minus2 2] 119909 (119905) (72)
10 Mathematical Problems in Engineeringlog((e))
1
0
minus1
minus2
minus3
minus4
minus5
0 t108642
Figure 6 Time evolution of the logarithm of the prediction errorMASS system 120591 = 12119904
0 5 10 t
minus20
minus10
0
10
20
x11x21x31
x41x51x61
0 5 10 tminus20
minus10
0
10
20
x12x22x32
x42x52x62
Figure 7 Time evolution of the state unstable agents 120591 = 1119904
The delay of the system is 120591 = 1119904 the partition of theobserver is119898 = 4 and the initial conditions are set as
1199090 = [minus3 02 minus1 05 3 1 minus15 0 4 minus12 minus2 0]119879 (73)
The gain of each subpredictor is given by119871 119894 = [minus08212 07263]119879 and the control gains are1198701 = [minus05417 minus 075] and 1198702 = [minus4 03] Figures 7and 8 present the evolution in time of the state of the systemand the prediction errors respectively where after a transientperiod the desired convergence is obtained Figure 9 presentsthe evolution of the control signal The logarithm of thenorm of the prediction error is presented in Figure 10
0 5 10 tminus20
minus10
0
10
ew11ew21ew31
ew41ew51ew61
0 5 10 t
minus10
0
10
20
ew12ew22ew32
ew42ew52ew62
Figure 8 Time evolution of the estimation errors unstable agents120591 = 1119904
0 5 10 t
minus6
minus4
minus2
0
2
4
6
u1u2u3
u4u5u6
Figure 9 Time evolution of the control signal unstable agents 120591 =1119904
7 Conclusions
This work deals with the consensus problem for multiagentsystems with LTI dynamics and input time-delay A modifiedpartitioned predictor-observer is proposed to estimate thefuture state values of the agents These predicted states areused in the consensus protocol in order to compensatethe input time-delays Formal proofs for the convergenceof the predictor and consensus are given The performednumerical evaluations show that a larger number of partitions
Mathematical Problems in Engineering 11
0 5 10 t
log((e))
25
2
15
1
05
0
minus05
minus1
Figure 10 Time evolution of the logarithm of the prediction errorunstable agents 120591 = 1119904
in the predictor-observer results in an improvement of theresponse of the system and in a larger time-delay that can becompensated
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] W Ren and E Atkins ldquoDistributed multi-vehicle coordinatedcontrol via local information exchangerdquo International Journal ofRobust and Nonlinear Control vol 17 no 10-11 pp 1002ndash10332007
[2] R Olfati-Saber and R M Murray ldquoDistributed cooperativecontrol ofmultiple vehicle formations using structural potentialfunctionsrdquo IFACWorld Congress 2002
[3] J A Fax and R M Murray ldquoInformation flow and cooperativecontrol of vehicle formationsrdquo IEEE Transactions on AutomaticControl vol 49 no 9 pp 1465ndash1476 2004
[4] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[5] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbour rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[6] L Moreau ldquoConsensus and cooperation in networked multi-agent systemsrdquo IEEE Transactions onAutomatic Control vol 50no 2 pp 169ndash182 2005
[7] J Xi N Cai and Y Zhong ldquoConsensus problems for high-orderlinear time-invariant swarm systemsrdquo Physica A StatisticalMechanics and its Applications vol 389 no 24 pp 5619ndash56272010
[8] W Ren and R W BeardDistributed Consensus in Multi-VehicleCooperative Control Theory and Applications Springer-VerlagLondon UK 2008
[9] L Peng J Yingmin D Junping and Y Shiying ldquoDistributedconsensus protocol for second-order agents with fixed topology
and time-delayrdquo in Proceedings of the 26th Chinese ControlConference (CCC rsquo07) pp 577ndash581 2007
[10] Z Yan D Wu and Y Liu ldquoConsensus of discrete multiagentsystem with various time delays and environmental distur-bancesrdquo Entropy vol 16 no 12 pp 6524ndash6538 2014
[11] D Lee and M W Spong ldquoAgreement with non-uniforminformation delaysrdquo in Proceedings of the American ControlConference IEEE 2006
[12] P Lin and Y Jia ldquoConsensus of a class of second-order multi-agent systems with time-delay and jointly-connected topolo-giesrdquo IEEE Transactions on Automatic Control vol 55 no 3 pp778ndash784 2010
[13] P Lin and Y Jia ldquoConsensus of second-order discrete-timemulti-agent systems with nonuniform time-delays and dynam-ically changing topologiesrdquoAutomatica vol 49 no 5 pp 2154ndash2158 2009
[14] J Xi Z Shi and Y Zhong ldquoConsensus analysis and designfor high-order linear swarm systems with time-varying delaysrdquoPhysicaA StatisticalMechanics and its Applications vol 390 no23-24 pp 4114ndash4123 2011
[15] J Xi Z Wang G Liu and Y Zhong ldquoConsensus problems forlinear time-varying swarm systemswith topology variances andmultiple time delaysrdquo in Proceedings of the 2013 32nd ChineseControl Conference (CCC rsquo13) pp 192ndash198 2013
[16] X Luo X Li S Li and X Guan ldquoConsensus for linear multi-agent systems with constant and time-varying communicationdelays via delay-decomposition approachrdquo in Proceedings of the11th World Congress on Intelligent Control and Automation pp353ndash358 2014
[17] Y Cao T Oguchi P Verhoeckx and H Nijmeijer ldquoConsensuscontrol for a multiagent systemwith time delaysrdquoMathematicalProblems in Engineering vol 2017 Article ID 4063184 11 pages2017
[18] S Mehra and S R Sahoo ldquoTrajectory tracking with input delayinmulti-agent system Double integrator caserdquo in Proceedings ofthe 2016 International Conference onUnmannedAircraft Systems(ICUAS rsquo16) pp 387ndash393 2016
[19] S Mehra A Sen and S R Sahoo ldquoTrajectory tracking inheterogeneous multi-agent system without and with inputdelayrdquo in Proceedings of the 2017 Indian Control Conference (ICCrsquo17) pp 338ndash343 2017
[20] B Zhou and Z Lin ldquoConsensus of high-order multi-agent sys-tems with large input and communication delaysrdquo Automaticavol 50 no 2 pp 452ndash464 2014
[21] C Wang Z Zuo Z Lin and Z Ding ldquoA truncated predictionapproach to consensus control of lipschitz nonlinearmultiagentsystems with input delayrdquo IEEE Transactions on Control ofNetwork Systems vol 4 no 4 pp 716ndash724 2017
[22] P Shi and Q K Shen ldquoObserver-based leader-following con-sensus of uncertain nonlinear multi-agent systemsrdquo Interna-tional Journal of Robust and Nonlinear Control 2017
[23] O J M Smith ldquoCloser control of loops with deadtimerdquoChemical Engineering Progress vol 53 no 5 pp 217ndash219 1957
[24] K Watanabe and M Ito ldquoA process-model control for linearsystems with delayrdquo IEEE Transactions on Automatic Controlvol 26 no 6 pp 1261ndash1269 1981
[25] W Michiels and D Roose ldquoTime-delay compensation inunstable plants using delayed state feedbackrdquo in Proceedings ofthe 40th IEEE Conference on Decision and Control rsquo01 vol 2 pp1433ndash1437 IEEE 2001
12 Mathematical Problems in Engineering
[26] A Manitius and A W Olbrot ldquoFinite spectrum assignmentproblem for systems with delaysrdquo IEEE Transactions on Auto-matic Control vol 24 no 4 pp 541ndash553 1979
[27] Z Artstein ldquoLinear systems with delayed controls a reductionrdquoIEEE Transactions on Automatic Control vol 27 no 4 pp 869ndash879 1982
[28] L Mirkin and N Raskin ldquoEvery stabilizing dead-time con-troller has an observerndashpredictor-based structurerdquo Automaticavol 39 no 10 pp 1747ndash1754 2003
[29] S Mondie and W Michiels ldquoFinite spectrum assignment ofunstable time-delay systems with a safe implementationrdquo IEEETransactions on Automatic Control vol 48 no 12 pp 2207ndash2212 2003
[30] B Zhou ldquoInput delay compensation of linear systems with bothstate and input delays by nested predictionrdquoAutomatica vol 50no 5 pp 1434ndash1443 2014
[31] M Najafi S Hosseinnia F Sheikholeslam and M KarimadinildquoClosed-loop control of dead time systems via sequential sub-predictorsrdquo International Journal of Control vol 86 no 4 pp599ndash609 2013
[32] F Sheikholeslam S Hosseinnia M Najafi and Q WangldquoRobust H infin control of single input-delay systems based onsequential sub-predictorsrdquo IET Control Theory amp Applicationsvol 8 no 13 pp 1175ndash1184 2014
[33] F Cacace F Conte A Germani and G Palombo ldquoOptimalcontrol of linear systems with large and variable input delaysrdquoSystems amp Control Letters vol 89 pp 1ndash7 2016
[34] F Cacace A Germani and C Manes ldquoPredictor-based controlof linear systems with large and variable measurement delaysrdquoInternational Journal of Control vol 87 no 4 pp 704ndash714 2014
[35] F Mazenc and M Malisoff ldquoStabilization and robustness anal-ysis for time-varying systems with time-varying delays usinga sequential subpredictors approachrdquo Automatica vol 82 pp118ndash127 2017
[36] A Germani C Manes and P Pepe ldquoA new approach to stateobservation of nonlinear systems with delayed outputrdquo Instituteof Electrical andElectronics Engineers Transactions onAutomaticControl vol 47 no 1 pp 96ndash101 2002
[37] M Velasco-Villa J Heras-Godınez J A Vazquez-Santacruzand V Fragoso-Rubio ldquoDelayed consensus problem for singleand double integrator systemsrdquo Mathematical Problems inEngineering vol 2015 Article ID 461098 15 pages 2015
[38] V Fragoso-Rubio M Velasco-Villa and M A Hernandez-Perez ldquoConsensus problem for linear time invariant systemswith time-delayrdquo in Proceedings of the National Conference ofAutomatic Control rsquo17 pp 90ndash95 2017
[39] C Godsil and G Royle Algebraic Graph Theory Springer NewYork NY USA 2001
[40] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[41] W Michiels K Engelborghs P Vansevenant and D RooseldquoContinuous pole placement for delay equationsrdquo Automaticavol 38 no 5 pp 747ndash761 2002
[42] K Gu V L Kharitonov and J Chen Stability of Time-DelaySystems Birkhauser 2003
[43] R E Bellman and K L Cooke Differential-Difference Equa-tions Rand Corporation 1963
[44] I Estrada-Sanchez M Velasco-Villa and H Rodrıguez-CortesldquoPrediction-based control for nonlinear systems with inputdelayrdquoMathematical Problems in Engineering vol 2017 ArticleID 7415418 11 pages 2017
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

8 Mathematical Problems in Engineering
Since 119869119862 is the Jordan block of 119867 corresponding to theeigenvalues of119860+1198611198701 and considering that the pair (119860 119861) iscontrollable it can be concluded that the pair (119860 + 1198611198701 119861) isalso controllable and therefore the right choice of matrix 1198701guarantees that 119909119862(119905) achieves consensus Now 119909119888(119905) is givenby
119909119862 (119905)= 119875[119890119869119862119905 00 119890119869119862119905] [0 0 120572119901+1 (0) 120572119899119901 (0)]
119879 (61)
that yields
119909119862 (119905) = 119875[[0
119890119869119862119905 [120572119901+1 (0) 120572119899119901 (0)]119879]] (62)
And since 119869119862 is the Jordan block of 119867 corresponding tothe eigenvalues of 119860 + 1198611198701 minus 1205821198711198941198611198702 for 119894 = 2 3 119899 thenit can be concluded that for system (28) to achieve consensusmatrices119860+1198611198701 minus1205821198711198941198611198702 119894 = 2 3 119899 must be Hurwitzwhich implies
lim119905997888rarrinfin119909119862 (119905) = 0 (63)
Considering (60) and (63) the system consensus value isgiven by
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin
119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ]
+ 119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1
times (L otimes 1198611198702 minus 119868119899 otimes 1198611198701) 119890119908119891 (120579 minus 119891120591) 119889120579
(64)
Since it has been shown that lim119905997888rarrinfin119890119908119891(119905) = 0lim119905997888rarrinfin119875 119898sum119891=1
int1199050119890119869119867(119905minus120579)119875minus1 (L otimes 1198611198702 minus 119868119899 otimes 1198611198701)
times 119890119908119891 (120579 minus 119891120591) 119889120579 = 119864(65)
with a real constant vector 119864 thenlim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin119875[119890119869119862119905 [1205721 (0) 120572119901 (0)]1198790 ] + 119864 (66)
Finally defining
[1205731 (119905) 120573119901 (119905)]119879 = 119890119869119862119905 [1205721 (0) 120572119901 (0)]119879 (67)
and considering that Lemma 4 from [7] proves that the first119901 eigenvectors of119867 are given by 119901119892 = 1119899 otimes 119888119895 for 119892 = 1 119901
1 2 3
456
Figure 1 Communication topology
where 119888119892 are the eigenvectors of 119860 + 1198611198701 and 1119899 isin R119899 is thevector with all of its entries equal to one the consensus value(66) yields
lim119905997888rarrinfin119909 (119905) = lim
119905997888rarrinfin1119899
otimes [1198881 119888119901] [1205731 (119905) 120573119901 (119905)]119879 + 119864(68)
Remark 14 It should be noted that the previous proof isbased on the corresponding proof presented in [7] with thedifference that the proof presented in this work includes thepredicted state used in the consensus protocol which resultsin a consensus value affected by the initial injection errorsrepresented by 119864 in (68)
Remark 15 Notice that the prediction-observation schemeproposed here can compensate the time-delay of the agentswhen it is placed either at the input or at the output Inthe case of agents with input time-delay each agent willestimate its own future state and send it to its neighborswhich will use them to calculate its own control thuscompensating their input time-delay In the case where theagents present an output time-delay once again each agentwould estimate its current state from its delayed output andsend the undelayed estimated state to the other agents Inboth cases the consensus will be achieved by means of adecentralized algorithm
6 Numerical Evaluations
Numerical evaluations of the proposed solution carriedout consider two cases the Multiagent Supporting System(MASS) composed by six agents presented in [7] and a mul-tiagent system formed by six agents with unstable dynamicswhose stabilization is achieved in [31] For simplicity inboth cases the communication topology is used depicted inFigure 1 with the corresponding Laplacian matrix given by
L =[[[[[[[[[[[[
1 0 0 0 0 minus1minus1 1 0 0 0 00 minus1 2 minus1 0 00 0 0 1 minus1 00 0 0 minus1 1 0minus1 0 0 0 minus1 2
]]]]]]]]]]]]
(69)
Mathematical Problems in Engineering 9
0 t108642
minus2
0
2
4
6
x11x21x31
x41x51x61
Figure 2 Time evolution of the state MASS system 120591 = 12119904
0 t108642
minus8minus6minus4minus2024
x12x22x32
x42x52x62
Figure 3 Time evolution of the state MASS system 120591 = 12119904
Example 1 In the case of the MASS system the dynamics ofeach agent is given by
119894 (119905) = [[[0 1minus119896119898119894minus119863119898119894]]]119909119894 (119905) + [01] 119906 (119905 minus 120591119894) (70)
where 119909119894(119905) = [119911119894(119905) 119894(119905)]119879 119911119894(119905) is the height of each agent119898119894 is the mass 119863 is the damping at each agent 119896 is thestiffness and 119906119894(119905) is the control input The implementationof the predictor considers a partition of119898 = 4 and the systemparameters 119898119894 = 106 119896 = 120 and 119863 = 505 The initialconditions are set as
1199090 = [minus3 minus15 minus2 minus2 0 1 4 minus1 2 3 6 2]119879 (71)
The gain matrix for the predictor-observer is given byŁ119894 = [1 0 4 0]119879 and the consensus gain vectors 1198701 =[113208 minus02358] and 1198702 = [88687 1] The delay consid-ered is 120591 = 12119904 the results are given in Figures 2 3 4 and 5that represent the evolution in time of the state observationerrors and control signal respectively The evolution of thelogarithm of the homogeneous norm of the prediction erroris depicted in Figure 6 to show its exponential convergence Itcan be seen that with the partition of the predictor-observerlarge delays can be compensated
minus2
0
2
4
6
ew11ew21ew31
ew41ew51ew61
minus8minus6minus4minus2024
ew12ew22ew32
ew42ew52ew62
0 t108642
0 t108642
Figure 4 Time evolution of the estimation errors MASS system120591 = 12119904
minus1
0
1
2
3
4
u1u2u3
u4u5u6
0 t108642
Figure 5 Time evolution of the control signal MASS system 120591 =12119904
Example 2 In a more challenging situation an unstablesystem presented in [31] is taken into account to form amultiagent system with 119899 = 6 and the communicationtopology presented in Figure 1 The dynamics of each agentis given by
(119905) = [minus5 minus63 4 ] 119909 (119905) + [04] 119906 (119905 minus 120591)
119910 (119905) = [minus2 2] 119909 (119905) (72)
10 Mathematical Problems in Engineeringlog((e))
1
0
minus1
minus2
minus3
minus4
minus5
0 t108642
Figure 6 Time evolution of the logarithm of the prediction errorMASS system 120591 = 12119904
0 5 10 t
minus20
minus10
0
10
20
x11x21x31
x41x51x61
0 5 10 tminus20
minus10
0
10
20
x12x22x32
x42x52x62
Figure 7 Time evolution of the state unstable agents 120591 = 1119904
The delay of the system is 120591 = 1119904 the partition of theobserver is119898 = 4 and the initial conditions are set as
1199090 = [minus3 02 minus1 05 3 1 minus15 0 4 minus12 minus2 0]119879 (73)
The gain of each subpredictor is given by119871 119894 = [minus08212 07263]119879 and the control gains are1198701 = [minus05417 minus 075] and 1198702 = [minus4 03] Figures 7and 8 present the evolution in time of the state of the systemand the prediction errors respectively where after a transientperiod the desired convergence is obtained Figure 9 presentsthe evolution of the control signal The logarithm of thenorm of the prediction error is presented in Figure 10
0 5 10 tminus20
minus10
0
10
ew11ew21ew31
ew41ew51ew61
0 5 10 t
minus10
0
10
20
ew12ew22ew32
ew42ew52ew62
Figure 8 Time evolution of the estimation errors unstable agents120591 = 1119904
0 5 10 t
minus6
minus4
minus2
0
2
4
6
u1u2u3
u4u5u6
Figure 9 Time evolution of the control signal unstable agents 120591 =1119904
7 Conclusions
This work deals with the consensus problem for multiagentsystems with LTI dynamics and input time-delay A modifiedpartitioned predictor-observer is proposed to estimate thefuture state values of the agents These predicted states areused in the consensus protocol in order to compensatethe input time-delays Formal proofs for the convergenceof the predictor and consensus are given The performednumerical evaluations show that a larger number of partitions
Mathematical Problems in Engineering 11
0 5 10 t
log((e))
25
2
15
1
05
0
minus05
minus1
Figure 10 Time evolution of the logarithm of the prediction errorunstable agents 120591 = 1119904
in the predictor-observer results in an improvement of theresponse of the system and in a larger time-delay that can becompensated
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] W Ren and E Atkins ldquoDistributed multi-vehicle coordinatedcontrol via local information exchangerdquo International Journal ofRobust and Nonlinear Control vol 17 no 10-11 pp 1002ndash10332007
[2] R Olfati-Saber and R M Murray ldquoDistributed cooperativecontrol ofmultiple vehicle formations using structural potentialfunctionsrdquo IFACWorld Congress 2002
[3] J A Fax and R M Murray ldquoInformation flow and cooperativecontrol of vehicle formationsrdquo IEEE Transactions on AutomaticControl vol 49 no 9 pp 1465ndash1476 2004
[4] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[5] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbour rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[6] L Moreau ldquoConsensus and cooperation in networked multi-agent systemsrdquo IEEE Transactions onAutomatic Control vol 50no 2 pp 169ndash182 2005
[7] J Xi N Cai and Y Zhong ldquoConsensus problems for high-orderlinear time-invariant swarm systemsrdquo Physica A StatisticalMechanics and its Applications vol 389 no 24 pp 5619ndash56272010
[8] W Ren and R W BeardDistributed Consensus in Multi-VehicleCooperative Control Theory and Applications Springer-VerlagLondon UK 2008
[9] L Peng J Yingmin D Junping and Y Shiying ldquoDistributedconsensus protocol for second-order agents with fixed topology
and time-delayrdquo in Proceedings of the 26th Chinese ControlConference (CCC rsquo07) pp 577ndash581 2007
[10] Z Yan D Wu and Y Liu ldquoConsensus of discrete multiagentsystem with various time delays and environmental distur-bancesrdquo Entropy vol 16 no 12 pp 6524ndash6538 2014
[11] D Lee and M W Spong ldquoAgreement with non-uniforminformation delaysrdquo in Proceedings of the American ControlConference IEEE 2006
[12] P Lin and Y Jia ldquoConsensus of a class of second-order multi-agent systems with time-delay and jointly-connected topolo-giesrdquo IEEE Transactions on Automatic Control vol 55 no 3 pp778ndash784 2010
[13] P Lin and Y Jia ldquoConsensus of second-order discrete-timemulti-agent systems with nonuniform time-delays and dynam-ically changing topologiesrdquoAutomatica vol 49 no 5 pp 2154ndash2158 2009
[14] J Xi Z Shi and Y Zhong ldquoConsensus analysis and designfor high-order linear swarm systems with time-varying delaysrdquoPhysicaA StatisticalMechanics and its Applications vol 390 no23-24 pp 4114ndash4123 2011
[15] J Xi Z Wang G Liu and Y Zhong ldquoConsensus problems forlinear time-varying swarm systemswith topology variances andmultiple time delaysrdquo in Proceedings of the 2013 32nd ChineseControl Conference (CCC rsquo13) pp 192ndash198 2013
[16] X Luo X Li S Li and X Guan ldquoConsensus for linear multi-agent systems with constant and time-varying communicationdelays via delay-decomposition approachrdquo in Proceedings of the11th World Congress on Intelligent Control and Automation pp353ndash358 2014
[17] Y Cao T Oguchi P Verhoeckx and H Nijmeijer ldquoConsensuscontrol for a multiagent systemwith time delaysrdquoMathematicalProblems in Engineering vol 2017 Article ID 4063184 11 pages2017
[18] S Mehra and S R Sahoo ldquoTrajectory tracking with input delayinmulti-agent system Double integrator caserdquo in Proceedings ofthe 2016 International Conference onUnmannedAircraft Systems(ICUAS rsquo16) pp 387ndash393 2016
[19] S Mehra A Sen and S R Sahoo ldquoTrajectory tracking inheterogeneous multi-agent system without and with inputdelayrdquo in Proceedings of the 2017 Indian Control Conference (ICCrsquo17) pp 338ndash343 2017
[20] B Zhou and Z Lin ldquoConsensus of high-order multi-agent sys-tems with large input and communication delaysrdquo Automaticavol 50 no 2 pp 452ndash464 2014
[21] C Wang Z Zuo Z Lin and Z Ding ldquoA truncated predictionapproach to consensus control of lipschitz nonlinearmultiagentsystems with input delayrdquo IEEE Transactions on Control ofNetwork Systems vol 4 no 4 pp 716ndash724 2017
[22] P Shi and Q K Shen ldquoObserver-based leader-following con-sensus of uncertain nonlinear multi-agent systemsrdquo Interna-tional Journal of Robust and Nonlinear Control 2017
[23] O J M Smith ldquoCloser control of loops with deadtimerdquoChemical Engineering Progress vol 53 no 5 pp 217ndash219 1957
[24] K Watanabe and M Ito ldquoA process-model control for linearsystems with delayrdquo IEEE Transactions on Automatic Controlvol 26 no 6 pp 1261ndash1269 1981
[25] W Michiels and D Roose ldquoTime-delay compensation inunstable plants using delayed state feedbackrdquo in Proceedings ofthe 40th IEEE Conference on Decision and Control rsquo01 vol 2 pp1433ndash1437 IEEE 2001
12 Mathematical Problems in Engineering
[26] A Manitius and A W Olbrot ldquoFinite spectrum assignmentproblem for systems with delaysrdquo IEEE Transactions on Auto-matic Control vol 24 no 4 pp 541ndash553 1979
[27] Z Artstein ldquoLinear systems with delayed controls a reductionrdquoIEEE Transactions on Automatic Control vol 27 no 4 pp 869ndash879 1982
[28] L Mirkin and N Raskin ldquoEvery stabilizing dead-time con-troller has an observerndashpredictor-based structurerdquo Automaticavol 39 no 10 pp 1747ndash1754 2003
[29] S Mondie and W Michiels ldquoFinite spectrum assignment ofunstable time-delay systems with a safe implementationrdquo IEEETransactions on Automatic Control vol 48 no 12 pp 2207ndash2212 2003
[30] B Zhou ldquoInput delay compensation of linear systems with bothstate and input delays by nested predictionrdquoAutomatica vol 50no 5 pp 1434ndash1443 2014
[31] M Najafi S Hosseinnia F Sheikholeslam and M KarimadinildquoClosed-loop control of dead time systems via sequential sub-predictorsrdquo International Journal of Control vol 86 no 4 pp599ndash609 2013
[32] F Sheikholeslam S Hosseinnia M Najafi and Q WangldquoRobust H infin control of single input-delay systems based onsequential sub-predictorsrdquo IET Control Theory amp Applicationsvol 8 no 13 pp 1175ndash1184 2014
[33] F Cacace F Conte A Germani and G Palombo ldquoOptimalcontrol of linear systems with large and variable input delaysrdquoSystems amp Control Letters vol 89 pp 1ndash7 2016
[34] F Cacace A Germani and C Manes ldquoPredictor-based controlof linear systems with large and variable measurement delaysrdquoInternational Journal of Control vol 87 no 4 pp 704ndash714 2014
[35] F Mazenc and M Malisoff ldquoStabilization and robustness anal-ysis for time-varying systems with time-varying delays usinga sequential subpredictors approachrdquo Automatica vol 82 pp118ndash127 2017
[36] A Germani C Manes and P Pepe ldquoA new approach to stateobservation of nonlinear systems with delayed outputrdquo Instituteof Electrical andElectronics Engineers Transactions onAutomaticControl vol 47 no 1 pp 96ndash101 2002
[37] M Velasco-Villa J Heras-Godınez J A Vazquez-Santacruzand V Fragoso-Rubio ldquoDelayed consensus problem for singleand double integrator systemsrdquo Mathematical Problems inEngineering vol 2015 Article ID 461098 15 pages 2015
[38] V Fragoso-Rubio M Velasco-Villa and M A Hernandez-Perez ldquoConsensus problem for linear time invariant systemswith time-delayrdquo in Proceedings of the National Conference ofAutomatic Control rsquo17 pp 90ndash95 2017
[39] C Godsil and G Royle Algebraic Graph Theory Springer NewYork NY USA 2001
[40] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[41] W Michiels K Engelborghs P Vansevenant and D RooseldquoContinuous pole placement for delay equationsrdquo Automaticavol 38 no 5 pp 747ndash761 2002
[42] K Gu V L Kharitonov and J Chen Stability of Time-DelaySystems Birkhauser 2003
[43] R E Bellman and K L Cooke Differential-Difference Equa-tions Rand Corporation 1963
[44] I Estrada-Sanchez M Velasco-Villa and H Rodrıguez-CortesldquoPrediction-based control for nonlinear systems with inputdelayrdquoMathematical Problems in Engineering vol 2017 ArticleID 7415418 11 pages 2017
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 9
0 t108642
minus2
0
2
4
6
x11x21x31
x41x51x61
Figure 2 Time evolution of the state MASS system 120591 = 12119904
0 t108642
minus8minus6minus4minus2024
x12x22x32
x42x52x62
Figure 3 Time evolution of the state MASS system 120591 = 12119904
Example 1 In the case of the MASS system the dynamics ofeach agent is given by
119894 (119905) = [[[0 1minus119896119898119894minus119863119898119894]]]119909119894 (119905) + [01] 119906 (119905 minus 120591119894) (70)
where 119909119894(119905) = [119911119894(119905) 119894(119905)]119879 119911119894(119905) is the height of each agent119898119894 is the mass 119863 is the damping at each agent 119896 is thestiffness and 119906119894(119905) is the control input The implementationof the predictor considers a partition of119898 = 4 and the systemparameters 119898119894 = 106 119896 = 120 and 119863 = 505 The initialconditions are set as
1199090 = [minus3 minus15 minus2 minus2 0 1 4 minus1 2 3 6 2]119879 (71)
The gain matrix for the predictor-observer is given byŁ119894 = [1 0 4 0]119879 and the consensus gain vectors 1198701 =[113208 minus02358] and 1198702 = [88687 1] The delay consid-ered is 120591 = 12119904 the results are given in Figures 2 3 4 and 5that represent the evolution in time of the state observationerrors and control signal respectively The evolution of thelogarithm of the homogeneous norm of the prediction erroris depicted in Figure 6 to show its exponential convergence Itcan be seen that with the partition of the predictor-observerlarge delays can be compensated
minus2
0
2
4
6
ew11ew21ew31
ew41ew51ew61
minus8minus6minus4minus2024
ew12ew22ew32
ew42ew52ew62
0 t108642
0 t108642
Figure 4 Time evolution of the estimation errors MASS system120591 = 12119904
minus1
0
1
2
3
4
u1u2u3
u4u5u6
0 t108642
Figure 5 Time evolution of the control signal MASS system 120591 =12119904
Example 2 In a more challenging situation an unstablesystem presented in [31] is taken into account to form amultiagent system with 119899 = 6 and the communicationtopology presented in Figure 1 The dynamics of each agentis given by
(119905) = [minus5 minus63 4 ] 119909 (119905) + [04] 119906 (119905 minus 120591)
119910 (119905) = [minus2 2] 119909 (119905) (72)
10 Mathematical Problems in Engineeringlog((e))
1
0
minus1
minus2
minus3
minus4
minus5
0 t108642
Figure 6 Time evolution of the logarithm of the prediction errorMASS system 120591 = 12119904
0 5 10 t
minus20
minus10
0
10
20
x11x21x31
x41x51x61
0 5 10 tminus20
minus10
0
10
20
x12x22x32
x42x52x62
Figure 7 Time evolution of the state unstable agents 120591 = 1119904
The delay of the system is 120591 = 1119904 the partition of theobserver is119898 = 4 and the initial conditions are set as
1199090 = [minus3 02 minus1 05 3 1 minus15 0 4 minus12 minus2 0]119879 (73)
The gain of each subpredictor is given by119871 119894 = [minus08212 07263]119879 and the control gains are1198701 = [minus05417 minus 075] and 1198702 = [minus4 03] Figures 7and 8 present the evolution in time of the state of the systemand the prediction errors respectively where after a transientperiod the desired convergence is obtained Figure 9 presentsthe evolution of the control signal The logarithm of thenorm of the prediction error is presented in Figure 10
0 5 10 tminus20
minus10
0
10
ew11ew21ew31
ew41ew51ew61
0 5 10 t
minus10
0
10
20
ew12ew22ew32
ew42ew52ew62
Figure 8 Time evolution of the estimation errors unstable agents120591 = 1119904
0 5 10 t
minus6
minus4
minus2
0
2
4
6
u1u2u3
u4u5u6
Figure 9 Time evolution of the control signal unstable agents 120591 =1119904
7 Conclusions
This work deals with the consensus problem for multiagentsystems with LTI dynamics and input time-delay A modifiedpartitioned predictor-observer is proposed to estimate thefuture state values of the agents These predicted states areused in the consensus protocol in order to compensatethe input time-delays Formal proofs for the convergenceof the predictor and consensus are given The performednumerical evaluations show that a larger number of partitions
Mathematical Problems in Engineering 11
0 5 10 t
log((e))
25
2
15
1
05
0
minus05
minus1
Figure 10 Time evolution of the logarithm of the prediction errorunstable agents 120591 = 1119904
in the predictor-observer results in an improvement of theresponse of the system and in a larger time-delay that can becompensated
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] W Ren and E Atkins ldquoDistributed multi-vehicle coordinatedcontrol via local information exchangerdquo International Journal ofRobust and Nonlinear Control vol 17 no 10-11 pp 1002ndash10332007
[2] R Olfati-Saber and R M Murray ldquoDistributed cooperativecontrol ofmultiple vehicle formations using structural potentialfunctionsrdquo IFACWorld Congress 2002
[3] J A Fax and R M Murray ldquoInformation flow and cooperativecontrol of vehicle formationsrdquo IEEE Transactions on AutomaticControl vol 49 no 9 pp 1465ndash1476 2004
[4] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[5] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbour rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[6] L Moreau ldquoConsensus and cooperation in networked multi-agent systemsrdquo IEEE Transactions onAutomatic Control vol 50no 2 pp 169ndash182 2005
[7] J Xi N Cai and Y Zhong ldquoConsensus problems for high-orderlinear time-invariant swarm systemsrdquo Physica A StatisticalMechanics and its Applications vol 389 no 24 pp 5619ndash56272010
[8] W Ren and R W BeardDistributed Consensus in Multi-VehicleCooperative Control Theory and Applications Springer-VerlagLondon UK 2008
[9] L Peng J Yingmin D Junping and Y Shiying ldquoDistributedconsensus protocol for second-order agents with fixed topology
and time-delayrdquo in Proceedings of the 26th Chinese ControlConference (CCC rsquo07) pp 577ndash581 2007
[10] Z Yan D Wu and Y Liu ldquoConsensus of discrete multiagentsystem with various time delays and environmental distur-bancesrdquo Entropy vol 16 no 12 pp 6524ndash6538 2014
[11] D Lee and M W Spong ldquoAgreement with non-uniforminformation delaysrdquo in Proceedings of the American ControlConference IEEE 2006
[12] P Lin and Y Jia ldquoConsensus of a class of second-order multi-agent systems with time-delay and jointly-connected topolo-giesrdquo IEEE Transactions on Automatic Control vol 55 no 3 pp778ndash784 2010
[13] P Lin and Y Jia ldquoConsensus of second-order discrete-timemulti-agent systems with nonuniform time-delays and dynam-ically changing topologiesrdquoAutomatica vol 49 no 5 pp 2154ndash2158 2009
[14] J Xi Z Shi and Y Zhong ldquoConsensus analysis and designfor high-order linear swarm systems with time-varying delaysrdquoPhysicaA StatisticalMechanics and its Applications vol 390 no23-24 pp 4114ndash4123 2011
[15] J Xi Z Wang G Liu and Y Zhong ldquoConsensus problems forlinear time-varying swarm systemswith topology variances andmultiple time delaysrdquo in Proceedings of the 2013 32nd ChineseControl Conference (CCC rsquo13) pp 192ndash198 2013
[16] X Luo X Li S Li and X Guan ldquoConsensus for linear multi-agent systems with constant and time-varying communicationdelays via delay-decomposition approachrdquo in Proceedings of the11th World Congress on Intelligent Control and Automation pp353ndash358 2014
[17] Y Cao T Oguchi P Verhoeckx and H Nijmeijer ldquoConsensuscontrol for a multiagent systemwith time delaysrdquoMathematicalProblems in Engineering vol 2017 Article ID 4063184 11 pages2017
[18] S Mehra and S R Sahoo ldquoTrajectory tracking with input delayinmulti-agent system Double integrator caserdquo in Proceedings ofthe 2016 International Conference onUnmannedAircraft Systems(ICUAS rsquo16) pp 387ndash393 2016
[19] S Mehra A Sen and S R Sahoo ldquoTrajectory tracking inheterogeneous multi-agent system without and with inputdelayrdquo in Proceedings of the 2017 Indian Control Conference (ICCrsquo17) pp 338ndash343 2017
[20] B Zhou and Z Lin ldquoConsensus of high-order multi-agent sys-tems with large input and communication delaysrdquo Automaticavol 50 no 2 pp 452ndash464 2014
[21] C Wang Z Zuo Z Lin and Z Ding ldquoA truncated predictionapproach to consensus control of lipschitz nonlinearmultiagentsystems with input delayrdquo IEEE Transactions on Control ofNetwork Systems vol 4 no 4 pp 716ndash724 2017
[22] P Shi and Q K Shen ldquoObserver-based leader-following con-sensus of uncertain nonlinear multi-agent systemsrdquo Interna-tional Journal of Robust and Nonlinear Control 2017
[23] O J M Smith ldquoCloser control of loops with deadtimerdquoChemical Engineering Progress vol 53 no 5 pp 217ndash219 1957
[24] K Watanabe and M Ito ldquoA process-model control for linearsystems with delayrdquo IEEE Transactions on Automatic Controlvol 26 no 6 pp 1261ndash1269 1981
[25] W Michiels and D Roose ldquoTime-delay compensation inunstable plants using delayed state feedbackrdquo in Proceedings ofthe 40th IEEE Conference on Decision and Control rsquo01 vol 2 pp1433ndash1437 IEEE 2001
12 Mathematical Problems in Engineering
[26] A Manitius and A W Olbrot ldquoFinite spectrum assignmentproblem for systems with delaysrdquo IEEE Transactions on Auto-matic Control vol 24 no 4 pp 541ndash553 1979
[27] Z Artstein ldquoLinear systems with delayed controls a reductionrdquoIEEE Transactions on Automatic Control vol 27 no 4 pp 869ndash879 1982
[28] L Mirkin and N Raskin ldquoEvery stabilizing dead-time con-troller has an observerndashpredictor-based structurerdquo Automaticavol 39 no 10 pp 1747ndash1754 2003
[29] S Mondie and W Michiels ldquoFinite spectrum assignment ofunstable time-delay systems with a safe implementationrdquo IEEETransactions on Automatic Control vol 48 no 12 pp 2207ndash2212 2003
[30] B Zhou ldquoInput delay compensation of linear systems with bothstate and input delays by nested predictionrdquoAutomatica vol 50no 5 pp 1434ndash1443 2014
[31] M Najafi S Hosseinnia F Sheikholeslam and M KarimadinildquoClosed-loop control of dead time systems via sequential sub-predictorsrdquo International Journal of Control vol 86 no 4 pp599ndash609 2013
[32] F Sheikholeslam S Hosseinnia M Najafi and Q WangldquoRobust H infin control of single input-delay systems based onsequential sub-predictorsrdquo IET Control Theory amp Applicationsvol 8 no 13 pp 1175ndash1184 2014
[33] F Cacace F Conte A Germani and G Palombo ldquoOptimalcontrol of linear systems with large and variable input delaysrdquoSystems amp Control Letters vol 89 pp 1ndash7 2016
[34] F Cacace A Germani and C Manes ldquoPredictor-based controlof linear systems with large and variable measurement delaysrdquoInternational Journal of Control vol 87 no 4 pp 704ndash714 2014
[35] F Mazenc and M Malisoff ldquoStabilization and robustness anal-ysis for time-varying systems with time-varying delays usinga sequential subpredictors approachrdquo Automatica vol 82 pp118ndash127 2017
[36] A Germani C Manes and P Pepe ldquoA new approach to stateobservation of nonlinear systems with delayed outputrdquo Instituteof Electrical andElectronics Engineers Transactions onAutomaticControl vol 47 no 1 pp 96ndash101 2002
[37] M Velasco-Villa J Heras-Godınez J A Vazquez-Santacruzand V Fragoso-Rubio ldquoDelayed consensus problem for singleand double integrator systemsrdquo Mathematical Problems inEngineering vol 2015 Article ID 461098 15 pages 2015
[38] V Fragoso-Rubio M Velasco-Villa and M A Hernandez-Perez ldquoConsensus problem for linear time invariant systemswith time-delayrdquo in Proceedings of the National Conference ofAutomatic Control rsquo17 pp 90ndash95 2017
[39] C Godsil and G Royle Algebraic Graph Theory Springer NewYork NY USA 2001
[40] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[41] W Michiels K Engelborghs P Vansevenant and D RooseldquoContinuous pole placement for delay equationsrdquo Automaticavol 38 no 5 pp 747ndash761 2002
[42] K Gu V L Kharitonov and J Chen Stability of Time-DelaySystems Birkhauser 2003
[43] R E Bellman and K L Cooke Differential-Difference Equa-tions Rand Corporation 1963
[44] I Estrada-Sanchez M Velasco-Villa and H Rodrıguez-CortesldquoPrediction-based control for nonlinear systems with inputdelayrdquoMathematical Problems in Engineering vol 2017 ArticleID 7415418 11 pages 2017
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

10 Mathematical Problems in Engineeringlog((e))
1
0
minus1
minus2
minus3
minus4
minus5
0 t108642
Figure 6 Time evolution of the logarithm of the prediction errorMASS system 120591 = 12119904
0 5 10 t
minus20
minus10
0
10
20
x11x21x31
x41x51x61
0 5 10 tminus20
minus10
0
10
20
x12x22x32
x42x52x62
Figure 7 Time evolution of the state unstable agents 120591 = 1119904
The delay of the system is 120591 = 1119904 the partition of theobserver is119898 = 4 and the initial conditions are set as
1199090 = [minus3 02 minus1 05 3 1 minus15 0 4 minus12 minus2 0]119879 (73)
The gain of each subpredictor is given by119871 119894 = [minus08212 07263]119879 and the control gains are1198701 = [minus05417 minus 075] and 1198702 = [minus4 03] Figures 7and 8 present the evolution in time of the state of the systemand the prediction errors respectively where after a transientperiod the desired convergence is obtained Figure 9 presentsthe evolution of the control signal The logarithm of thenorm of the prediction error is presented in Figure 10
0 5 10 tminus20
minus10
0
10
ew11ew21ew31
ew41ew51ew61
0 5 10 t
minus10
0
10
20
ew12ew22ew32
ew42ew52ew62
Figure 8 Time evolution of the estimation errors unstable agents120591 = 1119904
0 5 10 t
minus6
minus4
minus2
0
2
4
6
u1u2u3
u4u5u6
Figure 9 Time evolution of the control signal unstable agents 120591 =1119904
7 Conclusions
This work deals with the consensus problem for multiagentsystems with LTI dynamics and input time-delay A modifiedpartitioned predictor-observer is proposed to estimate thefuture state values of the agents These predicted states areused in the consensus protocol in order to compensatethe input time-delays Formal proofs for the convergenceof the predictor and consensus are given The performednumerical evaluations show that a larger number of partitions
Mathematical Problems in Engineering 11
0 5 10 t
log((e))
25
2
15
1
05
0
minus05
minus1
Figure 10 Time evolution of the logarithm of the prediction errorunstable agents 120591 = 1119904
in the predictor-observer results in an improvement of theresponse of the system and in a larger time-delay that can becompensated
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] W Ren and E Atkins ldquoDistributed multi-vehicle coordinatedcontrol via local information exchangerdquo International Journal ofRobust and Nonlinear Control vol 17 no 10-11 pp 1002ndash10332007
[2] R Olfati-Saber and R M Murray ldquoDistributed cooperativecontrol ofmultiple vehicle formations using structural potentialfunctionsrdquo IFACWorld Congress 2002
[3] J A Fax and R M Murray ldquoInformation flow and cooperativecontrol of vehicle formationsrdquo IEEE Transactions on AutomaticControl vol 49 no 9 pp 1465ndash1476 2004
[4] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[5] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbour rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[6] L Moreau ldquoConsensus and cooperation in networked multi-agent systemsrdquo IEEE Transactions onAutomatic Control vol 50no 2 pp 169ndash182 2005
[7] J Xi N Cai and Y Zhong ldquoConsensus problems for high-orderlinear time-invariant swarm systemsrdquo Physica A StatisticalMechanics and its Applications vol 389 no 24 pp 5619ndash56272010
[8] W Ren and R W BeardDistributed Consensus in Multi-VehicleCooperative Control Theory and Applications Springer-VerlagLondon UK 2008
[9] L Peng J Yingmin D Junping and Y Shiying ldquoDistributedconsensus protocol for second-order agents with fixed topology
and time-delayrdquo in Proceedings of the 26th Chinese ControlConference (CCC rsquo07) pp 577ndash581 2007
[10] Z Yan D Wu and Y Liu ldquoConsensus of discrete multiagentsystem with various time delays and environmental distur-bancesrdquo Entropy vol 16 no 12 pp 6524ndash6538 2014
[11] D Lee and M W Spong ldquoAgreement with non-uniforminformation delaysrdquo in Proceedings of the American ControlConference IEEE 2006
[12] P Lin and Y Jia ldquoConsensus of a class of second-order multi-agent systems with time-delay and jointly-connected topolo-giesrdquo IEEE Transactions on Automatic Control vol 55 no 3 pp778ndash784 2010
[13] P Lin and Y Jia ldquoConsensus of second-order discrete-timemulti-agent systems with nonuniform time-delays and dynam-ically changing topologiesrdquoAutomatica vol 49 no 5 pp 2154ndash2158 2009
[14] J Xi Z Shi and Y Zhong ldquoConsensus analysis and designfor high-order linear swarm systems with time-varying delaysrdquoPhysicaA StatisticalMechanics and its Applications vol 390 no23-24 pp 4114ndash4123 2011
[15] J Xi Z Wang G Liu and Y Zhong ldquoConsensus problems forlinear time-varying swarm systemswith topology variances andmultiple time delaysrdquo in Proceedings of the 2013 32nd ChineseControl Conference (CCC rsquo13) pp 192ndash198 2013
[16] X Luo X Li S Li and X Guan ldquoConsensus for linear multi-agent systems with constant and time-varying communicationdelays via delay-decomposition approachrdquo in Proceedings of the11th World Congress on Intelligent Control and Automation pp353ndash358 2014
[17] Y Cao T Oguchi P Verhoeckx and H Nijmeijer ldquoConsensuscontrol for a multiagent systemwith time delaysrdquoMathematicalProblems in Engineering vol 2017 Article ID 4063184 11 pages2017
[18] S Mehra and S R Sahoo ldquoTrajectory tracking with input delayinmulti-agent system Double integrator caserdquo in Proceedings ofthe 2016 International Conference onUnmannedAircraft Systems(ICUAS rsquo16) pp 387ndash393 2016
[19] S Mehra A Sen and S R Sahoo ldquoTrajectory tracking inheterogeneous multi-agent system without and with inputdelayrdquo in Proceedings of the 2017 Indian Control Conference (ICCrsquo17) pp 338ndash343 2017
[20] B Zhou and Z Lin ldquoConsensus of high-order multi-agent sys-tems with large input and communication delaysrdquo Automaticavol 50 no 2 pp 452ndash464 2014
[21] C Wang Z Zuo Z Lin and Z Ding ldquoA truncated predictionapproach to consensus control of lipschitz nonlinearmultiagentsystems with input delayrdquo IEEE Transactions on Control ofNetwork Systems vol 4 no 4 pp 716ndash724 2017
[22] P Shi and Q K Shen ldquoObserver-based leader-following con-sensus of uncertain nonlinear multi-agent systemsrdquo Interna-tional Journal of Robust and Nonlinear Control 2017
[23] O J M Smith ldquoCloser control of loops with deadtimerdquoChemical Engineering Progress vol 53 no 5 pp 217ndash219 1957
[24] K Watanabe and M Ito ldquoA process-model control for linearsystems with delayrdquo IEEE Transactions on Automatic Controlvol 26 no 6 pp 1261ndash1269 1981
[25] W Michiels and D Roose ldquoTime-delay compensation inunstable plants using delayed state feedbackrdquo in Proceedings ofthe 40th IEEE Conference on Decision and Control rsquo01 vol 2 pp1433ndash1437 IEEE 2001
12 Mathematical Problems in Engineering
[26] A Manitius and A W Olbrot ldquoFinite spectrum assignmentproblem for systems with delaysrdquo IEEE Transactions on Auto-matic Control vol 24 no 4 pp 541ndash553 1979
[27] Z Artstein ldquoLinear systems with delayed controls a reductionrdquoIEEE Transactions on Automatic Control vol 27 no 4 pp 869ndash879 1982
[28] L Mirkin and N Raskin ldquoEvery stabilizing dead-time con-troller has an observerndashpredictor-based structurerdquo Automaticavol 39 no 10 pp 1747ndash1754 2003
[29] S Mondie and W Michiels ldquoFinite spectrum assignment ofunstable time-delay systems with a safe implementationrdquo IEEETransactions on Automatic Control vol 48 no 12 pp 2207ndash2212 2003
[30] B Zhou ldquoInput delay compensation of linear systems with bothstate and input delays by nested predictionrdquoAutomatica vol 50no 5 pp 1434ndash1443 2014
[31] M Najafi S Hosseinnia F Sheikholeslam and M KarimadinildquoClosed-loop control of dead time systems via sequential sub-predictorsrdquo International Journal of Control vol 86 no 4 pp599ndash609 2013
[32] F Sheikholeslam S Hosseinnia M Najafi and Q WangldquoRobust H infin control of single input-delay systems based onsequential sub-predictorsrdquo IET Control Theory amp Applicationsvol 8 no 13 pp 1175ndash1184 2014
[33] F Cacace F Conte A Germani and G Palombo ldquoOptimalcontrol of linear systems with large and variable input delaysrdquoSystems amp Control Letters vol 89 pp 1ndash7 2016
[34] F Cacace A Germani and C Manes ldquoPredictor-based controlof linear systems with large and variable measurement delaysrdquoInternational Journal of Control vol 87 no 4 pp 704ndash714 2014
[35] F Mazenc and M Malisoff ldquoStabilization and robustness anal-ysis for time-varying systems with time-varying delays usinga sequential subpredictors approachrdquo Automatica vol 82 pp118ndash127 2017
[36] A Germani C Manes and P Pepe ldquoA new approach to stateobservation of nonlinear systems with delayed outputrdquo Instituteof Electrical andElectronics Engineers Transactions onAutomaticControl vol 47 no 1 pp 96ndash101 2002
[37] M Velasco-Villa J Heras-Godınez J A Vazquez-Santacruzand V Fragoso-Rubio ldquoDelayed consensus problem for singleand double integrator systemsrdquo Mathematical Problems inEngineering vol 2015 Article ID 461098 15 pages 2015
[38] V Fragoso-Rubio M Velasco-Villa and M A Hernandez-Perez ldquoConsensus problem for linear time invariant systemswith time-delayrdquo in Proceedings of the National Conference ofAutomatic Control rsquo17 pp 90ndash95 2017
[39] C Godsil and G Royle Algebraic Graph Theory Springer NewYork NY USA 2001
[40] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[41] W Michiels K Engelborghs P Vansevenant and D RooseldquoContinuous pole placement for delay equationsrdquo Automaticavol 38 no 5 pp 747ndash761 2002
[42] K Gu V L Kharitonov and J Chen Stability of Time-DelaySystems Birkhauser 2003
[43] R E Bellman and K L Cooke Differential-Difference Equa-tions Rand Corporation 1963
[44] I Estrada-Sanchez M Velasco-Villa and H Rodrıguez-CortesldquoPrediction-based control for nonlinear systems with inputdelayrdquoMathematical Problems in Engineering vol 2017 ArticleID 7415418 11 pages 2017
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 11
0 5 10 t
log((e))
25
2
15
1
05
0
minus05
minus1
Figure 10 Time evolution of the logarithm of the prediction errorunstable agents 120591 = 1119904
in the predictor-observer results in an improvement of theresponse of the system and in a larger time-delay that can becompensated
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] W Ren and E Atkins ldquoDistributed multi-vehicle coordinatedcontrol via local information exchangerdquo International Journal ofRobust and Nonlinear Control vol 17 no 10-11 pp 1002ndash10332007
[2] R Olfati-Saber and R M Murray ldquoDistributed cooperativecontrol ofmultiple vehicle formations using structural potentialfunctionsrdquo IFACWorld Congress 2002
[3] J A Fax and R M Murray ldquoInformation flow and cooperativecontrol of vehicle formationsrdquo IEEE Transactions on AutomaticControl vol 49 no 9 pp 1465ndash1476 2004
[4] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[5] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbour rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[6] L Moreau ldquoConsensus and cooperation in networked multi-agent systemsrdquo IEEE Transactions onAutomatic Control vol 50no 2 pp 169ndash182 2005
[7] J Xi N Cai and Y Zhong ldquoConsensus problems for high-orderlinear time-invariant swarm systemsrdquo Physica A StatisticalMechanics and its Applications vol 389 no 24 pp 5619ndash56272010
[8] W Ren and R W BeardDistributed Consensus in Multi-VehicleCooperative Control Theory and Applications Springer-VerlagLondon UK 2008
[9] L Peng J Yingmin D Junping and Y Shiying ldquoDistributedconsensus protocol for second-order agents with fixed topology
and time-delayrdquo in Proceedings of the 26th Chinese ControlConference (CCC rsquo07) pp 577ndash581 2007
[10] Z Yan D Wu and Y Liu ldquoConsensus of discrete multiagentsystem with various time delays and environmental distur-bancesrdquo Entropy vol 16 no 12 pp 6524ndash6538 2014
[11] D Lee and M W Spong ldquoAgreement with non-uniforminformation delaysrdquo in Proceedings of the American ControlConference IEEE 2006
[12] P Lin and Y Jia ldquoConsensus of a class of second-order multi-agent systems with time-delay and jointly-connected topolo-giesrdquo IEEE Transactions on Automatic Control vol 55 no 3 pp778ndash784 2010
[13] P Lin and Y Jia ldquoConsensus of second-order discrete-timemulti-agent systems with nonuniform time-delays and dynam-ically changing topologiesrdquoAutomatica vol 49 no 5 pp 2154ndash2158 2009
[14] J Xi Z Shi and Y Zhong ldquoConsensus analysis and designfor high-order linear swarm systems with time-varying delaysrdquoPhysicaA StatisticalMechanics and its Applications vol 390 no23-24 pp 4114ndash4123 2011
[15] J Xi Z Wang G Liu and Y Zhong ldquoConsensus problems forlinear time-varying swarm systemswith topology variances andmultiple time delaysrdquo in Proceedings of the 2013 32nd ChineseControl Conference (CCC rsquo13) pp 192ndash198 2013
[16] X Luo X Li S Li and X Guan ldquoConsensus for linear multi-agent systems with constant and time-varying communicationdelays via delay-decomposition approachrdquo in Proceedings of the11th World Congress on Intelligent Control and Automation pp353ndash358 2014
[17] Y Cao T Oguchi P Verhoeckx and H Nijmeijer ldquoConsensuscontrol for a multiagent systemwith time delaysrdquoMathematicalProblems in Engineering vol 2017 Article ID 4063184 11 pages2017
[18] S Mehra and S R Sahoo ldquoTrajectory tracking with input delayinmulti-agent system Double integrator caserdquo in Proceedings ofthe 2016 International Conference onUnmannedAircraft Systems(ICUAS rsquo16) pp 387ndash393 2016
[19] S Mehra A Sen and S R Sahoo ldquoTrajectory tracking inheterogeneous multi-agent system without and with inputdelayrdquo in Proceedings of the 2017 Indian Control Conference (ICCrsquo17) pp 338ndash343 2017
[20] B Zhou and Z Lin ldquoConsensus of high-order multi-agent sys-tems with large input and communication delaysrdquo Automaticavol 50 no 2 pp 452ndash464 2014
[21] C Wang Z Zuo Z Lin and Z Ding ldquoA truncated predictionapproach to consensus control of lipschitz nonlinearmultiagentsystems with input delayrdquo IEEE Transactions on Control ofNetwork Systems vol 4 no 4 pp 716ndash724 2017
[22] P Shi and Q K Shen ldquoObserver-based leader-following con-sensus of uncertain nonlinear multi-agent systemsrdquo Interna-tional Journal of Robust and Nonlinear Control 2017
[23] O J M Smith ldquoCloser control of loops with deadtimerdquoChemical Engineering Progress vol 53 no 5 pp 217ndash219 1957
[24] K Watanabe and M Ito ldquoA process-model control for linearsystems with delayrdquo IEEE Transactions on Automatic Controlvol 26 no 6 pp 1261ndash1269 1981
[25] W Michiels and D Roose ldquoTime-delay compensation inunstable plants using delayed state feedbackrdquo in Proceedings ofthe 40th IEEE Conference on Decision and Control rsquo01 vol 2 pp1433ndash1437 IEEE 2001
12 Mathematical Problems in Engineering
[26] A Manitius and A W Olbrot ldquoFinite spectrum assignmentproblem for systems with delaysrdquo IEEE Transactions on Auto-matic Control vol 24 no 4 pp 541ndash553 1979
[27] Z Artstein ldquoLinear systems with delayed controls a reductionrdquoIEEE Transactions on Automatic Control vol 27 no 4 pp 869ndash879 1982
[28] L Mirkin and N Raskin ldquoEvery stabilizing dead-time con-troller has an observerndashpredictor-based structurerdquo Automaticavol 39 no 10 pp 1747ndash1754 2003
[29] S Mondie and W Michiels ldquoFinite spectrum assignment ofunstable time-delay systems with a safe implementationrdquo IEEETransactions on Automatic Control vol 48 no 12 pp 2207ndash2212 2003
[30] B Zhou ldquoInput delay compensation of linear systems with bothstate and input delays by nested predictionrdquoAutomatica vol 50no 5 pp 1434ndash1443 2014
[31] M Najafi S Hosseinnia F Sheikholeslam and M KarimadinildquoClosed-loop control of dead time systems via sequential sub-predictorsrdquo International Journal of Control vol 86 no 4 pp599ndash609 2013
[32] F Sheikholeslam S Hosseinnia M Najafi and Q WangldquoRobust H infin control of single input-delay systems based onsequential sub-predictorsrdquo IET Control Theory amp Applicationsvol 8 no 13 pp 1175ndash1184 2014
[33] F Cacace F Conte A Germani and G Palombo ldquoOptimalcontrol of linear systems with large and variable input delaysrdquoSystems amp Control Letters vol 89 pp 1ndash7 2016
[34] F Cacace A Germani and C Manes ldquoPredictor-based controlof linear systems with large and variable measurement delaysrdquoInternational Journal of Control vol 87 no 4 pp 704ndash714 2014
[35] F Mazenc and M Malisoff ldquoStabilization and robustness anal-ysis for time-varying systems with time-varying delays usinga sequential subpredictors approachrdquo Automatica vol 82 pp118ndash127 2017
[36] A Germani C Manes and P Pepe ldquoA new approach to stateobservation of nonlinear systems with delayed outputrdquo Instituteof Electrical andElectronics Engineers Transactions onAutomaticControl vol 47 no 1 pp 96ndash101 2002
[37] M Velasco-Villa J Heras-Godınez J A Vazquez-Santacruzand V Fragoso-Rubio ldquoDelayed consensus problem for singleand double integrator systemsrdquo Mathematical Problems inEngineering vol 2015 Article ID 461098 15 pages 2015
[38] V Fragoso-Rubio M Velasco-Villa and M A Hernandez-Perez ldquoConsensus problem for linear time invariant systemswith time-delayrdquo in Proceedings of the National Conference ofAutomatic Control rsquo17 pp 90ndash95 2017
[39] C Godsil and G Royle Algebraic Graph Theory Springer NewYork NY USA 2001
[40] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[41] W Michiels K Engelborghs P Vansevenant and D RooseldquoContinuous pole placement for delay equationsrdquo Automaticavol 38 no 5 pp 747ndash761 2002
[42] K Gu V L Kharitonov and J Chen Stability of Time-DelaySystems Birkhauser 2003
[43] R E Bellman and K L Cooke Differential-Difference Equa-tions Rand Corporation 1963
[44] I Estrada-Sanchez M Velasco-Villa and H Rodrıguez-CortesldquoPrediction-based control for nonlinear systems with inputdelayrdquoMathematical Problems in Engineering vol 2017 ArticleID 7415418 11 pages 2017
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

12 Mathematical Problems in Engineering
[26] A Manitius and A W Olbrot ldquoFinite spectrum assignmentproblem for systems with delaysrdquo IEEE Transactions on Auto-matic Control vol 24 no 4 pp 541ndash553 1979
[27] Z Artstein ldquoLinear systems with delayed controls a reductionrdquoIEEE Transactions on Automatic Control vol 27 no 4 pp 869ndash879 1982
[28] L Mirkin and N Raskin ldquoEvery stabilizing dead-time con-troller has an observerndashpredictor-based structurerdquo Automaticavol 39 no 10 pp 1747ndash1754 2003
[29] S Mondie and W Michiels ldquoFinite spectrum assignment ofunstable time-delay systems with a safe implementationrdquo IEEETransactions on Automatic Control vol 48 no 12 pp 2207ndash2212 2003
[30] B Zhou ldquoInput delay compensation of linear systems with bothstate and input delays by nested predictionrdquoAutomatica vol 50no 5 pp 1434ndash1443 2014
[31] M Najafi S Hosseinnia F Sheikholeslam and M KarimadinildquoClosed-loop control of dead time systems via sequential sub-predictorsrdquo International Journal of Control vol 86 no 4 pp599ndash609 2013
[32] F Sheikholeslam S Hosseinnia M Najafi and Q WangldquoRobust H infin control of single input-delay systems based onsequential sub-predictorsrdquo IET Control Theory amp Applicationsvol 8 no 13 pp 1175ndash1184 2014
[33] F Cacace F Conte A Germani and G Palombo ldquoOptimalcontrol of linear systems with large and variable input delaysrdquoSystems amp Control Letters vol 89 pp 1ndash7 2016
[34] F Cacace A Germani and C Manes ldquoPredictor-based controlof linear systems with large and variable measurement delaysrdquoInternational Journal of Control vol 87 no 4 pp 704ndash714 2014
[35] F Mazenc and M Malisoff ldquoStabilization and robustness anal-ysis for time-varying systems with time-varying delays usinga sequential subpredictors approachrdquo Automatica vol 82 pp118ndash127 2017
[36] A Germani C Manes and P Pepe ldquoA new approach to stateobservation of nonlinear systems with delayed outputrdquo Instituteof Electrical andElectronics Engineers Transactions onAutomaticControl vol 47 no 1 pp 96ndash101 2002
[37] M Velasco-Villa J Heras-Godınez J A Vazquez-Santacruzand V Fragoso-Rubio ldquoDelayed consensus problem for singleand double integrator systemsrdquo Mathematical Problems inEngineering vol 2015 Article ID 461098 15 pages 2015
[38] V Fragoso-Rubio M Velasco-Villa and M A Hernandez-Perez ldquoConsensus problem for linear time invariant systemswith time-delayrdquo in Proceedings of the National Conference ofAutomatic Control rsquo17 pp 90ndash95 2017
[39] C Godsil and G Royle Algebraic Graph Theory Springer NewYork NY USA 2001
[40] W Ren R W Beard and E M Atkins ldquoInformation consensusin multivehicle cooperative controlrdquo IEEE Control SystemsMagazine vol 27 no 2 pp 71ndash82 2007
[41] W Michiels K Engelborghs P Vansevenant and D RooseldquoContinuous pole placement for delay equationsrdquo Automaticavol 38 no 5 pp 747ndash761 2002
[42] K Gu V L Kharitonov and J Chen Stability of Time-DelaySystems Birkhauser 2003
[43] R E Bellman and K L Cooke Differential-Difference Equa-tions Rand Corporation 1963
[44] I Estrada-Sanchez M Velasco-Villa and H Rodrıguez-CortesldquoPrediction-based control for nonlinear systems with inputdelayrdquoMathematical Problems in Engineering vol 2017 ArticleID 7415418 11 pages 2017
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
Recommended