-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
1/59
MATB 314 & MATB 253 - LINEAR ALGEBRA
2009 Bulletin Data: Systems of Linear Equations and
Matrices,
Determinants, Euclidean Vector Spaces,
General Vector Spaces, Inner Product
Spaces, Eigenvalues and Eigenvectors,
Applications.
Textbook: Anton H. and Rorres C.: Elementary Linear
Algebra (Applications Version), 9 th Edition,
John Wiley & Sons, Inc, 2005.
Objectives:
At the end of the course, students should be able to solve
systems of linear equations using the Gaussian/ Gauss-Jordan
elimination, Cramers rule and theinverse of a matrix, calculate the
determinants, find the standard matrix of linear transformations
from R n to R m , determine whether a set of objects together
withoperations defined on it form a vector space, test for a
subspace, show whether aset of vectors is a basis, determine the
dimension of a vector space, find a basis for the row space, column
space and nullspace of a matrix, calculate the rank andnullity of a
matrix, give examples of inner product spaces, use the Gram-
Schmidt
process to find an orthonormal basis, find the eigenvalues and
the correspondingeigenvectors of a square matrix, how to
diagonalize a matrix. Some applications of linear algebra to
engineering are discussed.
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
2/59
2
Chapter 1
SYSTEMS OF LINEAR EQUATIONS AND MATRICES
Contents
Contents.....................................................................................................................
2
1.1 Introduction to Systems of Linear Equations
....................................................3
................................................................................................................................
3
1.2 Matrices and Matrix
Operations........................................................................
10
1.3 Gaussian Elimination
......................................................................................
18
____________________________________________________................................................29
Hence,......................................................................................................................
29
Recall
:......................................................................................................................29
1.4 Properties of Matrix
Operations........................................................................29
Let
...........................................................................................................................
36
1.5 Elementary Matrices and a Method for Finding
...............................................36
1.6 Further Results on Systems of Equations and
..............................................48
Invertibility.......................................................................................................
481.7 Application to Electrical Networks
..................................................................54
1.8 Diagonal and Triangular Matrices
.................................................................59
___________________________________________________ _
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
3/59
3
Introduction to Linear Algebra
SYSTEMS OF LINEAR EQUATIONS AND MATRICES
1.1 Introduction to Systems of Linear Equations
Linear algebra is the branch of mathematics concerned with
thestudy of vectors, vector spaces (or linear spaces), linear
transformations, and systems of linear equations in
finitedimensions. Vector spaces are a central theme in
modernmathematics; thus, linear algebra is widely used in both
abstractalgebra and functional analysis. Linear algebra also has
aconcrete representation in analytic geometry and it isgeneralized
in operator theory. It has extensive applications inthe natural
sciences and the social sciences, since nonlinear models can often
be approximated by a linear model.
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
4/59
4
In mathematics and linear algebra, a system of linear
equationsis a set of linear equations such as
1 2 3
1 2 3
1 2 3
4 6
3 2 7
2 2 3 3
x x x
x x x
x x x
+ = + =+ =
A standard problem is to decide if any assignment of values for
the unknowns can satisfy all three equations simultaneously, andto
find such an assignment if it exists. The existence of asolution
depends on the equations, and also on the availablevalues (whether
integers, real numbers , and so on).
There are many different ways to solve systems of linear
equations, such as substitution, elimination, matrix
anddeterminants. However, one of the most efficient ways isgiven by
Gaussian elimination (matrix).
In general, a system with m linear equations and n unknownscan
be written as
11 1 12 2 1 1
21 1 22 2 2 2
1 1 2 2
...
...
...
n n
n n
m m mn n m
a x a x a x b
a x a x a x b
a x a x a x b
+ + + =+ + + =
+ + + =
M M
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
5/59
5
where 1 2, ,..., n x x x are the unknowns and the numbers
11 12, ,..., mna a a are the coefficients of the system.
We can collect the coefficients in a matrix as follows:
If we represent each matrix by a single letter, this becomes
[ ] [ ] [ ] A x b=where A is an mn matrix, x is a column vector
with n entries,and b is a column vector with m entries.
Gauss-Jordan elimination applies to all these systems, even if
the coefficients come from an arbitrary field.
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
6/59
6
11 12 1 1 1
21 22 2 2 2
1 1
, ,
n
n
m m mn n m
a a a x b
a a a x b A x b
a a a x b
= = =
K
K M M L M M M
K
If the field is infinite (as in the case of the real or
complexnumbers), then only the following three cases are
possible(exactly one will be true)
For any given system of linear equations :
the system has no solution (the system is over determined)
the system has a single solution (the system is
exactlydetermined)
the system has infinitely many solutions (the system
isunderdetermined).
A system of equations that has at least one solution is
calledconsistent ; if there is no solutions it is said to be
inconsistent .
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
7/59
7
___________________________________________________ _
A system of the form 0 Ax = is called a homogeneous systemof
linear equations. The set of all solutions of such ahomogeneous
system is called the nullspace of the matrix A.
Example 1 :
11 1 12 2 1
21 1 22 2 2
1 1 2 2
... 0
... 0
... 0
n n
n n
m m mn n
a x a x a x
a x a x a x
a x a x a x
+ + + =+ + + =
+ + + =M M
If the system is homogeneous and 1 2 ... 0n x x x= = = = thenwe
have a trivial solution.
If the system is homogeneous and at least one x i 0 , thenwe
have a nontrivial solution.
Since a homogeneous linear system always has the
trivialsolution; there are only 2 possibilities for its
solution.
(a) The system has only the trivial solution
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
8/59
8
(b) The system has infinitely many solutions in
addition to the trivial solution.
(Howard,2005)
___________________________________________________
_
Augmented Matrices
Linear Equations matrix form
Augmented Matrix
11 12 1 1
21 22 2 2
1 1
n
n
m m mn m
a a a b
a a a b
a a a b
K
K
M M L M M
K
TheoremA homogeneous system of linear equations with more
unknownsthan equations has infinitely many solution.
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
9/59
9
To find the solution(s) of a given system of linear equations,
we
have to reduce an augmented matrix to row echelon form or
reduced row-echelon form . The reduction is done by using
operations on the rows of the augmented matrix. The
operations
are called the elementary row operations.
_____________________________________________________________________________
_
Elementary Row Operation
An elementary row operations (ERO) on a matrix A is one of
thefollowing :
1. Multiply a row by a nonzero constant, c cR i R i
2. Switching any two rows R i R j
3. Add c times of one row to another row cR i + R j R j
Elementary row operations are used to reduce an augmentedmatrix
or matrix to row echelon form or reduced row-echelonform . Reducing
the matrix to row echelon form is calledGaussian elimination and to
reduced row-echelon form is called GaussJordan elimination .
Gaussian elimination is anefficient algorithm for solving systems
of linear equations. An
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
10/59
10
extension of this algorithm, GaussJordan elimination, reducesthe
matrix further to reduced row echelon form.
In mathematics , GaussJordan elimination is a version of
Gaussian elimination that puts zeros both above and below each
pivot element as it goes from the top row of the givenmatrix to the
bottom. (http://en.wikipedia.org )
_____________________________________________________________________________
_
1.2 Matrices and Matrix Operations
Matrix
Matrix is a rectangular array of numbers or, moregenerally, a
table consisting of abstract quantities that can
be added and multiplied .
The numbers in the array are called the entries in the matrix
Matrices are used to describe linear equations , keep track of
the coefficients of linear transformations and to record
datathat depend on two parameters.
http://en.wikipedia.org/wiki/Mathematicshttp://en.wikipedia.org/w/index.php?title=Pivot_element&action=edithttp://en.wikipedia.org/w/index.php?title=Pivot_element&action=edithttp://en.wikipedia.org/http://en.wikipedia.org/wiki/Numberhttp://en.wikipedia.org/wiki/Ring_(mathematics)http://en.wikipedia.org/wiki/Ring_(mathematics)http://en.wikipedia.org/wiki/System_of_linear_equationshttp://en.wikipedia.org/wiki/Coefficienthttp://en.wikipedia.org/wiki/Linear_transformationhttp://en.wikipedia.org/wiki/Mathematicshttp://en.wikipedia.org/w/index.php?title=Pivot_element&action=edithttp://en.wikipedia.org/http://en.wikipedia.org/wiki/Numberhttp://en.wikipedia.org/wiki/Ring_(mathematics)http://en.wikipedia.org/wiki/Ring_(mathematics)http://en.wikipedia.org/wiki/System_of_linear_equationshttp://en.wikipedia.org/wiki/Coefficienthttp://en.wikipedia.org/wiki/Linear_transformation
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
11/59
11
Matrices can be added, multiplied, and decomposed invarious
ways, making them a key concept in linear algebra and matrix theory
.
Definitions and notations
The horizontal lines in a matrix are called rows and thevertical
lines are called columns.
A matrix with m rows and n columns is called an m-by- nmatrix
(written mn) and m and n are called its dimensions.
The dimensions of a matrix are always given with thenumber of
rows first, then the number of columns.
The entry of a matrix A that lies in the i -th row and the
j-thcolumn is called the i,j entry or ( i, j)-th entry of A. This
iswritten as a ij or ( A)ij. The row is always noted first ,
thenthe column.
We often write to define an mn matrix A with eachentry in the
matrix [ a ij]mxn called a ij for all 1 i m and
1 j n
http://en.wikipedia.org/wiki/Linear_algebrahttp://en.wikipedia.org/wiki/Matrix_theoryhttp://en.wikipedia.org/wiki/Linear_algebrahttp://en.wikipedia.org/wiki/Matrix_theory
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
12/59
12
(Adapted from http://en.wikipedia.org )
A matrix where one of the dimensions equals one is oftencalled a
vector , and interpreted as an element of realcoordinate space.
A 1 n matrix (one row and n columns) is called a rowvector , and
an m 1 matrix (one column and m rows) iscalled a column vector
.
Example 8 :
http://en.wikipedia.org/http://en.wikipedia.org/
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
13/59
13
[ ]
[ ]
12 4 1 3
0or 1
21 0 2 5 0
4
Row vector Column vector
A square matrix is a matrix which has the same number of rows
and columns.
A square matrix of order n and the entries a 11, a 22, . . . , a
nn arethe main diagonal of A.
The unit matrix or identity matrix I n, with elements onthe main
diagonal set to 1 and all other elements set to 0,satisfies M I n=M
and I n N=N for any m-by- n matrix M andn -by- k matrix N .
Example 9 :
if n = 3: I 3 =
1 0 0
0 1 0
0 0 1
__________________________________________________________
Operations on MatricesDefinitionTwo matrices are defined to be
equal if they have the samesize and their corresponding entries are
equal .
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
14/59
14
In matrix notation, if A= [ a ij] and B = [ b ij] have the same
size,then A = B if and only if ( A)ij= ( B)ij
Example 10
0 2 1 2
3 1 1 82 1 5 5
a c
b d e f
=
1, 8, 0, 3, 2 1a b c d e and f = = = = = =
__________________________________________________________
Addition and Subtraction ( Only on same size matrices )
Given m-by- n matrices A and B ,their sum A + B is the m-by- n
matrix computed by addingcorresponding entries
( A + B )ij = ( A) ij + ( B) ij
= a ij + b ij their difference A B is the m-by- n matrix
computed bysubtracting corresponding entries ( A - B)ij = ( A) ij -
( B) ij
= a ij - b ij Example 11 :
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
15/59
15
1. Addition
1 0 2 1 2 3 2 2 1
3 1 3 4 5 6 7 6 32 1 5 7 8 9 5 7 14
+ =
2. Subtraction
1 0 2 1 2 3 0 2 5
3 1 3 4 5 6 1 4 92 1 5 7 8 9 9 9 4
=
_____________________________________________________________________________
_
Scalar Multiples
If A is any matrix and c is any scalar, then the product cA is
thematrix obtained by multiplying each entry of the matrix A byc.
The matrix cA is said to be a scalar multiple of A. In
matrixnotation, if A = a ij , then ( cA) ij = c(A) ij = ca ij
Example 12 :
Linear combination c1A1 + c2A2 + . . . + cnAn
1 0 1 2 4 3 1 0 0
3 2 3 0 2 1 3 0 5 3 2 1
0 4 1 0 2 6 5 4 0
+
6 8 9
7 5 5
25 28 15
=
Multiplying Matrices
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
16/59
16
Multiplication of two matrices is well-defined only if thenumber
of columns of the left matrix is the same as thenumber of rows of
the right matrix.
If A is an m-by- n matrix and B is an n -by- p matrix, thentheir
matrix product AB is the m- by - p matrix ( m rows, pcolumns) given
by
Example 13
2 1 (2)(3) ( 1)(1) (2)(1) ( 1)(2)3 1
( ) 0 2 (0)(3) (2)(1) (0)(1) (2)(2)1 2
1 3 (1)(3) (1)( 3) (1)(1) ( 3)(2)
5 02 4
0 5
i
+ + = + + + +
=
______________________________________________
( )ii Find the (2,3) th in the following matrix multiplication
:
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
17/59
17
(2,3)
4 1 4 3 _ _ _ _ 1 2 40 1 3 1 _ _ _ _ 2 6 02 1 5 2
=
(2,3) th entry : [ ]4
2 6 0 3 8 (18) 0 26
5
= + + =
Matrix Products as Linear Combination
11 12 1 1
21 22 2 2
1 1
,
n
n
m m mn n
a a a x
a a a x A x
a a a x
= =
K
K
M M L M M
K
Then
11 12 1
21 22 21 2
1 1
n
nn
m m mn
a a a
a a a Ax x x x
a a a
= + + +
LM M M
11 1 12 2 1
21 1 22 2 2
1 1 2 2
...
...
...
n n
n n
m m mn n
a x a x a x
a x a x a x
a x a x a x
+ + ++ + +
=
+ + +M M M
_____________________________________________________________________________
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
18/59
18
1.3 Gaussian Elimination
Echelon Forms
Reducing the augmented matrix of a system to row-echelonform
To be in this form, a matrix must have the following
properties:
1. If there are any rows that consist entirely of zeros, then
theyare grouped together at the bottom of the matrix.
2. If a row does not consist entirely of zeroes, then the
firstnonzero number in the row is 1, We call this a leading 1.
3. If any two successive rows that do not consist entirelyzeros,
the leading 1 in the lower row occurs farther to theright than the
leading 1 in the higher row.
4. In Reduced Row-Echelon , each column that contains aleading 1
has zeros everywhere else in the higher row.
____________________________________________________________________________
Row-Echelon
Example 2 :
01 0 3
0 1 1 2
0 0 11
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
19/59
19
0 1 2 3 2
70 0 1 120 0 0 100 0 0 0
,
1 4 6 3 1
30 0 1 350 0 0 100 0 0 0
_____________________________________________________________________________
_
Reduced Row-Echelon
Example 3 :
1 0 0 3
0 1 0 2
0 0 1 1
,
0 1 0 0 2
0 0 1 0 0
0 0 0 1 2
0 0 0 0 0
,
1 0 0 0 2
0 1 0 0 3
0 0 1 0 2
0 0 0 1 1
___________________________________________________ _
The augmented matrix for a system of linear equations is put
inreduced row-echelon form, and then the solution set of thesystem
will be evident by inspection or after a few simple steps.
Suppose that the augmented matrix for a system of linear
equations has been reduced by row operations to the givenreduced
row-echelon form.
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
20/59
20
Example 4:
(a)
1 0 0 50 1 0 2
0 0 1 4
means by
1 2 35 , 2 , 4 x x x= = =
(b)
1 0 0 4 1
0 1 0 2 6
0 0 1 3 2
means by
3 4 2 4 1 43 2 , 2 6 , 4 1 x x x x x x+ = + = + =
(c)
1 6 0 0 4 2
0 0 1 0 3 1
0 0 0 1 5 2
0 0 0 0 0 0
use first 3 rows to solve the system of linear equation
(d) 1 0 0 3
0 1 0 2
0 0 0 4
means no solution
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
21/59
21
___________________________________________________ _
Solutions of Linear Systems
Elimination Methods : Gaussian Elimination andBack
Substitution
Example 5 :
Solve the system by Gaussian Elimination
1.1 2 3
1 2 3
1 3
2 3 5
2 5 3 3
8 17
x x x
x x x
x x
+ + =+ + =
+ =
Solution
Gaussian Elimination
1 2 2
1 3 3 2 3 3
1 2 3 5 2 1 2 3 5 1 2 3 5
2 5 3 3 0 1 3 7 0 1 3 7
1 0 8 17 0 2 5 12 2 0 0 1 2
R R R
R R R R R R
+ + +
3 3
1 2 3 5
0 1 3 7( 1)
0 0 1 2 R R
Back Substitution
1 2 3 2 3 32 3 5 , 3 7 , 2 x x x x x x+ + = = =
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
22/59
22
( )( ) ( ) ( ) ( )
2 2
1 1
3 2 7 7 6 1
2 1 3 2 5 5 2 6 1
x x
x x
= = + =
+ + = = + =
1 2 31 , 1 , 2 x x x = = =
_____________________________________________________________________________
_
2.1 2 3
1 2 3
1 2 3
2 2 2 4
3 2 3
4 3 2 3
x x x
x x x
x x x
+ = + =
+ =
Solution
1 1
2 2 2 4 1 1 1 21
3 2 1 3 3 2 1 324 3 2 3 4 3 2 3
R R
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
23/59
23
1 2 2
1 3 3
2 2
1 1 1 23 1 1 1 2
4 30 5 4 3 0 1
5 54 0 7 6 5 1 0 7 6 5
5
R R R
R R R R R
+ +
3 32 3 3
51 1 1 2 1 1 1 2
7 24 3 4 3
0 1 0 15 5 5 52 4 0 0 1 2
0 05 5
R R R R R
+
1 2 3 2 3 3
4 31 2 , , 2
5 5 x x x x x x+ = = =
( )
( ) ( ) ( ) ( )
2 2
1 1
4 3 3 8 52 , 1
5 5 5 5 5
1 2 2 , 2 1 2 1
x x
x x
= = + = =
+ = = + =
1 2 31 , 1 , 2 x x x = = =
Gauss - Jordan Elimination
Example 6 :
(a) Consider the linear system1 2 3
1 2 3
1 3
2 3 5
2 5 3 3
8 17
x x x
x x x
x x
+ + =+ + =
+ =.
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
24/59
24
Solve the system using Gauss-Jordan elimination method.
Solution (a)
Gauss - Jordan Elimination
1 2 2 2 1 1
1 3 3 2 3 3
1 2 3 5 2 1 2 3 5 2 1 0 9 19
2 5 3 3 0 1 3 7 0 1 3 71 0 8 17 0 2 5 12 2 0 0 1 2
R R R R R R
R R R R R R
+ +
+ +
3 1 1
3 33 2 2
1 0 9 19 9 1 0 0 1
0 1 3 7 0 1 0 1( 1)
0 0 1 2 3 0 0 1 2
R R R
R R R R R
+ +
1 2 31 , 1 , 2 x x x = = =
(b) Consider
1 2 3
1 2 3
1 2 3
2 2 2 4
3 2 3
4 3 2 3
x x x
x x x
x x x
+ = + =
+ =.
Solve the system using Gauss-Jordan elimination method.
Solution (b)Gauss-Jordan elimination
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
25/59
25
1 1
2 2 2 4 1 1 1 213 2 1 3 3 2 1 324 3 2 3 4 3 2 3
R R
1 2 2
1 3 3
1 1 1 2 3 1 1 1 2
3 2 1 3 0 5 4 3
4 3 2 3 4 0 7 6 5
R R R
R R R
+ +
2 21 1 1 1 25
4 30 1
5 50 7 6 5
R R
( ) 2 1 1
2 3 3
1 71 0 5 514 3
0 15 5
7 2 40 0
5 5
R R R
R R R
+ +
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
26/59
26
3 1 1
3 2 23 3
1 7 11 05 5 1 0 0 154 3
0 1 0 1 0 15 5 4 0 0 1 25 0 0 1 2
52
R R R
R R R R R
+ +
1 2 31 , 1 , 2 x x x = = =
Homogeneous Linear Systems
Example 7 :
(a) Solve
0
2 0
3 4 0
x y z
x y z
x y z
+ =+ + =+ =
Solution (a)
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
27/59
27
1 2 2
1 3 3
2 3 3
0
2 03 4 0
1 1 1 0 1 1 1 01 2 1 0 0 1 2 0
3 4 1 0 3 0 1 2 0
1 1 1 00 1 2 00 0 0 0
x y z
x y z
x y z
R R R
R R R
R R R
many solutions
+ =+ + =
+ =
+
+
+
Since last row is entirely zero entries, the homogeneous
systemhas nontrivial solution (many solutions )
( ) ( )
1 2 3 2 3
3
2 2
1 1
0 , 2 0
2 0 2
2 0 3
x x x x x
Let x t
x t x t
x t t x t
+ = + =
=
+ = =
+ = =
1 2 33 , 2 , x t x t x t = = =
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
28/59
28
(b) Solve
2 5 0
3 2 2 0
4 4 5 0
x y z
x y z
x y z
+ = + =
+ =
Solution (b)
1 2 2
1 3 3
1 2 5 0 3 1 2 5 0
3 2 2 0 0 4 13 0
4 4 5 0 4 0 4 15 0
R R R
R R R
+
+
2 22 3 3
1 01 2 51 2 5 0 4
130 4 13 0 0 1 0
4
0 0 2 0 0 0 2 0
R R R R R
+
3 32 1 1
0 03 311 0 1 02 22 2
13 130 1 0 0 1 0
4 40 0 2 0 0 10 0
R R R R R
+
3 2 2
3 1 1
131 0 0 040 1 0 0
3 0 0 1 02
R R R
R R R
+ +
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
29/59
29
Therefore the system has exactly one solution. ( Trivialsolution
)
1 2 30 , 0 , 0 x x x = = =
___________________________________________________
_
Hence,
Recall :
Since a homogeneous linear system always has the
trivialsolution; there are only 2 possibilities for its
solution.
(a) The system has only the trivial solution
(b) The system has infinitely many solutions in
addition to the trivial solution.
(Howard,2005)
1.4 Properties of Matrix Operations
Properties of Matrix Arithmetic
Assuming that the sizes of the matrices are such that
theindicated operations can be performed, the following rules of
matrix arithmetic are valid. A, B ,C are matrices and a ,b, c are
any constant
(a) A + B = B + A (Commutative law for addition)(b) A + (B + C)
= (A + B) +C (Associative law for addition)
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
30/59
30
(c) A(BC) = (AB)C (Associative law for multiplication)(d) A (B +
C) = AB + AC (Left distributive law)(e) (B + C) A = BA + CA (Right
distributive law)(f) A (B C) = AB AC(g) (B C) A = BA CA(h) a (B +
C) = aB + aC(i) a (B C) = aB aC(j) (a + b)C = aC + bC(k) (a b)C =
aC bC(l) a (bC) = ( ab ) C
(m) a (BC) = ( aB)C = B( aC)
_____________________________________________________________________________
_
Zero Matrices
[ ]0 0 0
0 0 0 0 0 00 , , 0 0 0 ,
0 0 0 0 0 00 0 0
Properties of Zero Matrices
(a) A + 0 = 0 + A = A(b) A-A = 0(c) 0 A = A(d) A0 = 0 ; 0A
=0
_____________________________________________________________________________
_
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
31/59
31
Identity Matrices
2
3
4
1 0 0 01 0 0
1 0 0 1 0 0
, 0 1 0 ,0 1 0 0 1 00 0 1
0 0 0 1 I
I I
Inverse of A
Example 14
2 3 8 3Consider and .
5 8 5 2
Find and
A B
AB BA
= =
Definition
If A is a square matrix, and if a matrix B of the same size can
be found such that AB = BA= I, then A is to be invertible andB is
called an inverse of A . If no such matrix B can be found,then A is
said to be singular .
Theorem
If R is the reduced row-echelon form of an nxn matrix A ,
then either R has a row of zeros or R is the identity matrix I
n.
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
32/59
32
Solution
2 3 8 3 1 0 5 8 5 2 0 1
8 3 2 3 1 0.
5 2 5 8 0 1
AB
BA
= =
= =
Note: A
1
= B and B
1
= A
_________________________________________________________
Method of finding inverse of 2 x 2 invertible matrix
Properties of Inverses
1) If B and C are both inverses of the matrix A, then B = C
2) A A 1 = A 1A = I
3) If A and B are invertible matrices of the same size ,
Theorem
The matrix a b Ac d =
is invertible if 0ad bc , in
which case the inverse is given by the formula
1 1 - -=-
- -
d bd b ad bc ad bc Ac a c aad bc
ad bc ad bc
=
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
33/59
33
then AB is invertible and (A B) 1 = B 1A1
_________________________________________________________________________________________
Power of a Matrix
Definition If A is a square matrix, then we define the
nonnegative integer powersof A to be
a. A 0 = I
b. A n = A . A . A . . . A (n> 0)
n factors
c. A n = (A 1)n = A 1 . A1 . . . A1
n factors
Laws of Exponents
a . If A is a square matrix and r and s are integers, then
Ar A s = Ar+s
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
34/59
34
b. ( Ar ) s = A r s
c. If A is an invertible matrix, then : A1 is invertible and
( A1 ) 1 = A
d. If A is an invertible matrix, then : An is invertible and
( An ) 1 = ( A1 )n for n = 1, 2,
e. For any nonzero scalar k , the matrix kA is invertible
and
(kA)1 = (1/ k ) A1
__________________________________________________________________________________________
Transpose of a Matrix (AT)i j = (A) j i
Example 15 :
T T1 0 1 1 2 0 1 4
1 2 31. 2 3 0 0 3 4 2. 2 5
4 5 60 4 1 1 0 1 3 6
= =
DefinitionIf A is any m x n matrix, then the transpose of A,
denoted by
A T, is defined to be the n x m matrix that the results
frominterchanging the rows and columns of A ; that is, the
firstcolumn of AT is the first row of A, the second column of
AT
is the second row of A, and so forth.
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
35/59
35
Properties of the Transpose
If the sizes of the matrices are such that the stated operations
can be performed, then
(a) (( A )T)T = A
(b) ( A+ B)T= A T + B T and ( A B)T= A T B T
(c) (k A )T= k A T , where k is any scalar
(d) ( AB )T= B T A T
Invertibility of a Transpose
Example 16 :
Theorem
If A is an invertible matrix, then A T is also invertible
and
( A T)1 =( A 1)T
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
36/59
36
Let 12 3 8 3
and .5 8 5 2
A A = =
( )
( )
1
1 1
2 5 8 5 8 51= and = =
3 8 3 2 3 21
8 3 8 51and =
5 2 3 21
T T
T
A A
A A
=
_____________________________________________________________________________________
1.5 Elementary Matrices and a Method for Finding 1 A
Recall :
Given a system of linear equations, then for the matrixequation
Ax =b in which A is invertible n x n matrix for eachn x 1 matrix b,
has a unique solution x = A1b
In this section we will develop a method for finding the
inverseof a matrix, if it exists. To use this method, we do not
have tofind out first whether A1 exists. We start to find A1 ; if
in thecourse of the computation we hit a certain situation, then
weknow that A1 does not exists.. Otherwise we proceed tothe endand
obtain A1 . This method requires that the elementary roeoperations
be performed on A.
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
37/59
37
The Algorithm involved :If we place A and I n side-by-side to
form an augmented matrix[ A | I n ], then row operations on this
matrix produce identicaloperations on A and on I n. Then either
there are row operationsthat transform A to I n and I n to A1 , or
else A is not invertible.
1
A I
I A
Example :17
0 1 2
Given 1 0 3
4 3 8
A
=
0 1 2 1 0 0
1 0 3 0 1 0
4 3 8 0 0 1
1 0 3 0 1 00 1 2 1 0 0
4 3 8 0 0 1
A I
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
38/59
38
1 0 3 0 1 0
0 1 2 1 0 0
0 3 4 0 4 1
1 0 3 0 1 0
0 1 2 1 0 0
0 0 2 3 4 1
1 0 3 0 1 0
0 1 2 1 0 0
0 0 1 3/ 2 2 1/ 3
___________________________________________________ _
Elementary Matrices
.DefinitionAn n x n matrix is called an elementary matrix if it
can beobtained from the n x n identity matrix I n by performing
a
single elementary row operation
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
39/59
39
Example 18 :I E 1
1 3 3
1 0 0 1 0 00 1 0 0 1 0 .
0 0 1 1 0 1 R R R
I E +
= =
Row Operations and Inverse Row Operations
Rowoperation on Ithat producesE
Example Rowoperationon E thatreproducesI
Example
Multiply row i by c 0
[I] R 1 = 3R 1 [E] Multiplyrow i by 1/ c
1/3R 1[E] = [I] R 1
Interchangerows i and j
[I] 3 2 R R [E] Interchangerows i and j
[E] 2 3 R R [I]
Add c timesrow i to row j
[I] R 1 = R 1 +2R 3 [E] Add c times row i to row j
R 12R 3[E] =[I] R 1
To find the inverse of an invertible matrix A , find a sequence
of elementary row operations that reduces A to the identity andthen
perform this same sequence of operations on I n to obtain
A1
__________________________________________________________
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
40/59
40
Example 19 :
Given matrix
1 2 1
2 3 1
3 1 2
A
=
. Find the product of EA.
Let E is obtained from3 3 12 R R R= .
Solution
1 3 3
1 0 0 1 0 02
0 1 0 0 1 0
0 0 1 2 0 1
R R R I E
+ = = =
1 0 0 1 2 1 1 2 1
0 1 0 2 3 1 2 3 1
2 0 1 3 1 2 1 3 0
EA
= =
Theorem ROW OPERATIONS BY MATRIX MULTIPLICATION
Let A an m x n matrix , and let an elementary row operation be
performed on A to yielad matrix B. Let E obtained from
I m ( I n) by performing the same row operation as was
performedon A . Then B =EA .
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
41/59
41
By Theorem
1 3 3
1 2 1 1 2 12
2 3 1 = 2 3 13 1 2 1 3 0
R R R A B EA
+ =
= =
_____________________________________________________________________________
_
A method for Inverting Matrices
E k . . . E 2 E 1 A = I n A1 = E k . . . E 2 E 1 I n = E k . . .
E 2 E 1
A1
TheoremEvery elementary matrix is invertible, and the inverse is
alsoan elementary matrix
Theorem EQUIVALENT STATEMENTS
If A is an n x n matrix, then the following statements are
equivalent,that is, all true or all false.
(a) A is invertible(b) Ax = 0 has only the trivial solution(c)
The reduced row-echelon form of A is I n (d) A is a product of
elementary matrices
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
42/59
42
A = E 1 1 E 2 1 . . . E k 1 I n = E 1 1 E 2 1 . . . E k 1
(Elemetary matrices are invertible)
Consider the following :
1 0 1
0 1 1
1 1 0
A
=
1 3 3
2 3 3
1 0 1 1 0 0
0 1 1 0 1 0
1 1 0 0 0 1
1 0 1 1 0 0
0 1 1 0 1 0
0 1 1 1 0 1
1 0 1 1 0 00 1 1 0 1 0
0 0 2 1 1 1
R R R
R R R
+
+
3 3
1 0 1 1 0 01
0 1 1 0 1 0 20 0 11/ 2 1/ 2 1/ 2
R R
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
43/59
43
3 1 1
3 2 2
1 0 1 1/ 2 1/ 2 1/ 2
0 1 0 1/ 2 1/ 2 1/ 2
0 0 1 1/ 2 1/ 2 1/ 2
R R R
R R R
+ +
Example 20 :
Let A be a 3 3 X matrix such that 3 2 1 3 E E E A I = where1 E
is obtained from 3 I by performing the operation
1 3 1 R R R +
2 E is obtained from 3 I by performing the operation
2 1 22 R R R +
3 E is obtained from 3 I by performing the operation 3 2 R R
Find A and A1
using elementary matrices.(Note : E 3E2 E1 A = I 3 A = E 1 1 E2
1 E3 1
A1 = E 3E2 E1)
Solution
13 1 1 1 1
1 0 0 1 0 1 1 0 10 1 0 0 1 0 ; 0 1 0
0 0 1 0 0 1 0 0 1
I R R R E E = + = =
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
44/59
44
11 2 2 2 2
1 0 0 1 0 0 1 0
0 1 0 2 2 1 0 ; 2 1 00 0 1 0 0 1 0 0
I R R R E E = + = =
13 2 3 3
1 0 0 1 0 0 1 0 0
0 1 0 0 0 1 ; 0 0 1
0 0 1 0 1 0 0 1 0
I R R E E = = =
1 1 11 2 3
1 0 1 1 0 0 1 0 00 1 0 2 1 0 0 0 1
0 0 1 0 0 1 0 1 0
1 0 1 1 0 0 1 1 0
2 1 0 0 0 1 2 0 10 0 1 0 1 0 0 1 0
A E E E = =
= =
13 2 1
1 0 0 1 0 0 1 0 1
0 0 1 2 1 0 0 1 00 1 0 0 0 1 0 0 1
1 0 0 1 0 1 1 0 10 0 1 0 1 0 0 0 12 1 0 0 0 1 2 1 2
A E E E = =
= =
Try this
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
45/59
45
1 1 0
2 0 1
0 1 0
1 0 10 0 12 1 2
=
_ _ _
_ _ _
_ _ _
Row Operation to find A 1 [ A | I ] [ I | A1]
Example 21 :
Find the inverse of 1 2 34 5 6
3 1 2
A =
Solution 1 2 3 1 0 0 1 2 3 1 0 0
4 5 6 0 1 0 0 3 6 4 1 0
3 1 2 0 0 1 0 5 11 3 0 1
5 201 0 11 0 0 3 31 2 3
4 1 4 10 1 2 0 0 1 2 0
3 3 3 311 5 3 11 5 30 0 3 0 0 3
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
46/59
46
5 201 0 1 16 7 13 3 1 0 0 3 3
4 1 26 110 1 2 0 0 1 0 23 33 3 0 0 1 51111 5 13 30 0 1 1
3 3
1
16 7 13 3 16 7 31
26 11 2 26 11 63 3 311 5 3511 13 3
A
= =
Try this
1
16 7 3 1 2 3 _ _ _ 1 26 11 6 4 5 6 _ _ _ 3
11 5 3 3 1 2 _ _ _
A A
= =
_____________________________________________________________________________
_
Showing That a Matrix Is Not Invertible
Example 22 :
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
47/59
47
Show that A is not invertible
1 6 4
2 4 1
1 2 5
A
=
Solution
1 6 4 1 0 0
2 4 1 0 1 0
1 2 5 0 0 1
1 6 4 1 0 0
0 8 9 2 1 0
0 8 9 1 0 1
1 6 4 1 0 0
0 8 9 2 1 0
0 0 0 1 1 1
There is a row of zeros . Therefore A is not invertible.
A Consequence of Invertibility
Let A =
1 2 5
3 2 2
4 4 5
. If A is invertible , then
1. the homogeneous system has only the trivial solution .
2 5 0
3 2 2 0
4 4 5 0
x y z
x y z
x y z
+ = + =
+ =
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
48/59
48
2. the nonhomogeneous system has exactly one solution.
2 5 1
3 2 2 2
4 4 5 1
x y z
x y z
x y z
+ = + =
+ =
3. the linear system is consistent (the linear system has a
solution )
1
2
3
2 5
3 2 2
4 4 5
x y z b
x y z b
x y z b
+ = + =
+ =
__________________________________________________________
1.6 Further Results on Systems of Equations and
Invertibility
Basic Theorem
TheoremEvery system of linear equations has no solutions, or
hasexactly one solution, or has infinitely many solutions.
Linear Systems by Matrix Inversion
Theorem
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
49/59
49
If A is an invertible n x n matrix, then for each n x 1 matrix b
,the system of equations Ax =b has exactly one solution,namely , x
= A 1b
Solution of a Linear System Using A 1
Write as A x = b. Find A 1 then A 1(A x) = A 1b x = A 1b
Example 23 :
Consider the system of linear equations
1
2 10
2
x y
x z
y
= + =
=.
Solve using matrix inversion. ( using A1 )
Solution
A =
1 1 0
2 0 1
0 1 0
and A1 =
1 0 10 0 1
2 1 2
(from Example 18 )
1 0 1 1 3
0 0 1 10 2
2 1 2 2 4
=
x = 3 , y = 2 , z =
4
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
50/59
50
Solving Two Linear System at Once
Example 24 :
Solve the systems
2 2
2 5 1
3 7 2 1
x y z
x y z
x y z
+ = + + = + =
and
2 12 5 13 7 2 0
x y z
x y z
x y z
+ =+ + = + =
Solution
Linear system with a common coefficient matrix
1 2 1 2 1 1 2 1 2 1
2 5 1 1 1 0 9 1 5 3
3 7 2 1 0 0 1 1 5 3
1 2 1 2 1 1 2 1 2 1
0 9 1 5 3 0 9 1 5 30 0 10 50 30 0 0 1 5 3
1 2 0 3 2 1 2 0 3 2
0 9 0 0 0 0 1 0 0 0
0 0 1 5 3 0 0 1 5 3
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
51/59
51
1 0 0 3 2
0 1 0 0 00 0 1 5 3
First system : x = 3 , y = 0 , z = 5
Second system : x = 2 , y = 0 , z = 3
__________________________________________________________
Properties of Invertible Matrices
AB = I and BA = I for A & B are square
matrices
_____________________________________________________________________________
_
TheoremLet A be a square matrix,
(a) If B is a square matrix satisfying BA = I , then B = A 1
(b) If B is a square matrix satisfying AB = I , then B = A 1
Theorem EQUIVALENT STATEMENTS
If A is an n x n matrix, then the following statements
areequivalent, that is, all true or all false.
a) A is invertible b) A x = 0 has only the trivial solutionc)
The reduced row-echelon form of A is I n d) A is expressible as a
product of elementary
matrices.e) A x = b is consistent for every nx1 matrix bf) A x =
b has exactly one solution for every n x 1
matrix b
TheoremLet A and B be a square matrices of the same size.If AB
is invertible, then A and B must also be invertible.
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
52/59
52
__________________________________________________________
Determining Consistency by Elimination
Example 25:
Find the conditions that the bs must satisfy the system to
beconsistent . ( solution exists )
(a) 1 2 3 1
1 2 3 2
1 2 3 3
2 2 2
3 5
4 7 2
x x x b
x x x b
x x x b
+ =+ + =
=
(b)
1 2 3 1
1 2 3 2
1 2 3 3
2
2 3
3 7 4
x x x b
x x x b
x x x b
+ + = + =
+ =
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
53/59
53
Solution
(a)
11
2 2 1
33 1
11 1 122 2 2
33 5 1 0 2 4
24 7 2 20 3 6
bb
b b b
b b b
+
1 1
2 1 2 1
3 1 3 1 2 1
1 1 11 1 12 2
2 3 2 30 1 2 0 1 2
4 42 2 2 3
0 1 2 0 0 03 3 4
b b
b b b b
b b b b b b
+ +
3 1 2 12 2 3Therefore 03 4
b b b b+ =
3 1 2 14 8 6 9
012 12
b b b b+ + =
1 2 36 4 0b b b + + =
1 236
4b b
b =
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
54/59
54
(b)
1 1
2 1 2
3 3 1
1 1 2 1 1 21 2 3 0 1 5
3 7 4 0 10 2 3
b b
b b b
b b b
+
( ) ( )
1 1
1 2 1 2
3 1 1 2 3 1
1 1 2 1 1 2
0 1 5 0 1 5
0 10 2 3 0 0 52 10 3
b b
b b b b
b b b b b b
+
( ) ( )
1
1 2
1 2 3 1
1 1 2
0 1 5
0 0 1 10 3
52
b
b b
b b b b
+
Therefore b3 has no condition for the linear system to
beconsistent.
1.7 Application to Electrical Networks
Objective: Be able to obtain systems of linear equations
whosesolution yield the currents flowing in an electrical circuit
basedon the basic laws of electrical circuits.
The electrical circuits consist of two basic components
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
55/59
55
1. Electrical sources create currents in an
electricalcircuit
2. Resistors limits the magnitudes of the currents
There are 3 basic quantities associated with electrical
circuits:
- electrical potential (E) in volt, V- resistance (R) on ohms, -
current (I) in amperes, A
Electrical potential is associated with two points in an
electricalcircuit and is measured by a device called voltmeter
.
In an electrical circuit, the electrical potential between two
points is called the voltage drop.
The current and voltage drop can be positive (+ve) or negative(
ve).
The flow of current is governed by:
1. ohms Law the voltage drop across a resistor is the product of
the current passing through it and its
resistance E = IR
2. Kirchhoffs current Law The sum of the currentsflowing into
any point equals the sum of the currentsflowing out from the
point.
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
56/59
56
3. Kirchhoffs voltage Law Around any closed loop, thealgebraic
sum of the voltage drops is zero.
_________________________________________________ _
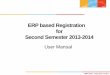
Example 1 :
Find the currents in the circuit.
Solution
2 1 3
2 1
2 3
3 2 14 03 4 24 0
I I I
I I
I I
= ++ =+ =
1 2 3
1 2
2 3
02 3 14
3 4 24
I I I
I I
I I
+ = + =
+ =
1 1 1 0
2 3 0 14
0 3 4 24
2 1 2
1 1 1 0
0 5 2 142
0 3 4 24 R R R
= +
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
57/59
57
3 2 3
3 3
1 1 1 0
0 5 2 143 5
0 0 26 78
1 1 1 0
0 5 2 1410 0 1 326
R R R
R R
= +
=
3
2 3 2 2
1 2 3 1 1
3
205 2 14 5 2(3) 14 45
0 4 3 0 1
I
I I I I
I I I I I
=
= = = =
+ = + = =
1 2 31 , 4 , 3 I I I = = =
______________________________________________
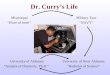
Example 2 :
Consider the electrical network shown in Figure 1.
ApplyKirchhoffs Law to find a system of linear equations
relating
the currents I 1, I 2 and I 3 .Determine the currents in the
circuit.
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
58/59
58
Solutions :
1 2 3
1 2
2 3
02 4
4 22
I I I
I I
I I
+ = =
+ =
1
2
3
1 1 1 0
2 1 0 4
0 1 4 22
I
I
I
=
1 2 33 , 2 , 5 I I I = = =
-
7/27/2019 Chapter_1-Slides(Sem 1 2013)
59/59
59
1.8 Diagonal and Triangular Matrices
Diagonal MatricesA diagonal matrix is a square n x n matrix
whose nondiagonal entries are zero .
Example 1
1 0 0
0 5 0
0 0 2
D
=
____________________________________________________________________________________________________________________
_
Triangular MatricesA Triangular matrix is an m x n matrix whose
entries either above or
below the main diagonal are zeros.
Example 2
1 2 3
0 5 6
0 0 2
A
=
1 0 0
4 5 0
3 1 2
B
=
Upper Triangular Lower Triangular
___________________________________________________________________________