EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
CHAPTER 4 : DIFFERENTIATION AND INTEGRATION
4.1 Introduction of Differentiation
4.1.1 Differentiation of Common Functions
Table 1.1
)(xfy = dx
dy
x 1 nx 1−nnx nkx 1−nnkx
Constant 0 xe xe kxe kxke xa aa x ln
xln x
1
kxln x
1
xsin xcos
kxsin kxk cos
xcos xsin−
kxcos kxk sin−
xtan xsek 2
kxtan kxsekk 2
xcot xec 2cos−
xsec xx tan.sec
xeccos - xxec cot.cos
xsinh xcosh
xcosh xsinh
xnsin xxn n cos.sin 1−
xncos xxn n sin.cos 1−−
xntan xsekxn n 21 .tan −
* k is a constant

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
Example 1 :
Find dx
dy in each of the following cases :
a) 3
13x
y = b) 54xy = c) xy 2=
d) 2
x
ey = e) 2
cosx
y = f) xy 3sin=
Solutions :
a.)
b) c)
d)
e) f)
Example 2 :
Write down the derivatives of the following :
a) xe3 b) x2 c) x3sin2
d) xe53 e)
2
xx ee −+ f) 4 cos
2x + 9 - 9 3x
Solutions :
a) b) c) d) e) f)

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
Example 3 :
Find dx
dy in each of the following cases :
a) x
xxy
2346 2 −+=
b) 2)5( −= xy
c) ( )2+= xxy
d) xe
yx
5ln8722
+=
e) xexy x
23
cos2 64 −+=
f) xx
y 2cos45
3 2−=
Solutions :
a) b)
c) d)
e) f)

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
4.2 Techniques of Differentiation 4.2.1 Techniques of Differentiation ;The Chain Rule, Product Rule
and Quotient Rule) 4.2.1.1 The Chain Rule If y is a function of x then ;
dx
du
du
dy
dx
dy ×=
Example 4 :
Differentiate ( )32 2 −= xy
Solution :
Example 5 :
Differentiate ( )42 1+= xy
Solution :

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
Example 6 :
Differentiate the following :
a) 6)54( −= xy b) ( )52 63 xxy −= c) 246 2 −+= xxy
d)
41
+=x
xy e) ( )23 4
1
−=x
y f) 1
22 ++
=xx
y
Solutions :
a) b) c) d) e) f) 4.2.1.2 Differentiation of a Product
If y = uv, where u and v are functions of x, then
dx
duv
dx
dvu
dx
dy +=

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
Example 7 :
Find dx
dy in each of the following cases :
a) ( )( )212 +−= xxy
b) )7)(6()( 43 xxxf = c) 423 )3(2)( += xxxf
Solutions:
a) b)
c)
4.2.1.3 Differentiation of a Quotient
If v
uy = , where u and v are functions of x, then,
dx
dy=
2v
vuvu ′−′
Example 8 :
Find dx
dy in each of the following cases :
a) 11
2
2
+−=
x
xy
b) x
xy
21+=
c) 6
2)(
3
2
+−+=
x
xxxf

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
Solutions :
a) b)
c)
4.2.2 Implicit Differentiation
A method of finding the derivative of an implicit function by taking the derivative of each
term with respect to the independent variable while keeping the derivative of the
dependent variable with respect to the independent variable in symbolic form and then
solving for that derivative.
If ),( yxfy = , where ),( yxf is implicit function , then,
dx
dyyxf
dy
dyxf
dx
d
dx
dy •+= ),(),(
Example 9 :
Assume that y is a function of x . Find dx
dyy =′ for x3 + y3 = 4
Solution :

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
Example 10 :
Assume that y is a function of x . Find dx
dyy =′ for )43sin( yxy +=
Solution :
4.2.3 Parametric Differentiation
Parametric differentiation: if x = x(t) and y = y(t) then
dt
dxdt
dy
dx
dy = ; provided 0≠dt
dx
Example 11 :
Find dx
dy when ttx −= 3 and 24 ty −= .
Solution :

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
Example 12 :
Find dx
dy when x = 3 cos t, y = 3 sin t
Solution :
4.2.4 Logarithmic and Trigonometric Differentiation
Table 1.2
y (u is a function of x) dx
dy
un nun-1 dx
du
kun nkun-1 dx
du
eu eu dx
du
au au ln (a) dx
du
ln (u) dx
du
u
1
sin (u) dx
duu)cos(
cos (u) dx
duu)sin(−
tan (u) dx
duu)(sec2
sec (u) dx
duuu )tan()sec(
cosec (u) dx
duuuec )cot()(cos−
sinh (u) dx
duu)cosh(
cosh (u) dx
duu)sinh(

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
• Properties of ln ;
a) ana n lnln =
b) baab lnlnln +=
c) bab
alnlnln −=
Example 13 :
Differentiate :
a) )(sin 2xy = b) xy 2sin= c) ( )2ln xy =
d) xey 3sin= d) ( )xy 2cosln= f) xy 5cos3=
Solutions :
a)
b)
c)
d) e) f)

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
Example 14 :
Determine
a) ( )[ ]xxdx
d3sin 4 + b) xxe
dx
d cos2 + c) )43(ln xdx
d +
Solutions :
a) b)
c)
Example 15 :
Find dx
dy in each of the following cases :
a) xxy tan2= b) xxy 3ln3=
c) xxy 5sin3= d) xey x ln3=
e) xey x 3ln4= f) )cos(23
)sin()(
t
tty
−=
Solutions :
a)
b)

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
c) d)
e)
f)
4.2.5 Tangents and Normals
Theory:
Consider the function: y = f(x), with point (x1,y1) lying on the function graph. The tangent
line to the function at (x1,y1) is the straight line that touches
y = f(x) at that point. Both the graph of y = f(x) and the tangent line pass through the
point, and the tangent line has the same gradient, 'm', as the function at that point.
The normal line to function y = f(x) at the point (x1,y1) is the straight line that passes
through the point making a 90º angle with the graph. The gradient of the normal line is -
1/m, where 'm' is the gradient of the tangent line at the same point.
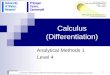
For example, consider the function y = x2. The tangent and normal lines at the point (1,1)
are shown on the diagram below:

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
The equation of the tangent line to y = f(x) at the point (x1,y1): ( 'm' is the gradient at (x1,y1) )
11)( yxxmy +−=
The equation of the normal line to y = f(x) at (x1,y1) is:
11)(1
yxxm
y +−−=
The derivative of y = f(x) at (x1,y1) gives us the gradient 'm'.
Example 16 :
Calculate the tangent and normal lines to the function: y = x2, when x = 1. Solution :
At x = 1, y = 12 = 1. So (x1,y1) = (1,1) The gradient 'm' at x = 1 is found by calculating the derivative of the function at that
point. For y = x2, xdx
dy2= . At x = 1, 2)1(2 ==
dx
dy.

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
So 'm' = 2.
The tangent line is given by:
11)( yxxmy +−=
Substituting, we have: y = 2(x - 1) + 1
Expanding and simplifying: y = 2x - 2 + 1
so: y = 2x – 1
Normal line:
11)(1
yxxm
y +−−=
23
21)1(
21 +−=+−−= xxy
Example 17 :
Find the equation of the tangent and normal line to 743 2 +−= xxy at x = 1.
Solution :

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
4.3 Introduction of Integration
Definitions
Given a function f(x) an anti-derivative of f(x) is any function F(x) such that
)()( xfxF =′
If F(x) is any anti-derivative of f(x) then the most general anti-derivative of f(x) is called
an indefinite integral and denoted,
∫ += cxFdxxf )()( , c is any constant
In this definition ∫ the is called the integral symbol, f(x) is called the integrand, x is
called the integration variable and the “c” is called the constant of integration.
4.3.1 The Indefinite Integrals
Table 1.3
∫ dxx n Cn
x n ++1
dxx∫1
ln x + C
∫+
dxbax
1 Cbax
a++ln
1
∫ dxe x ex + C
∫ dxekx Ck
ekx +
∫ dxa x C
a
a x
+ln
( )dxbax∫ + Cbaxan
n +++
+1)())(1(
1
∫ dxxsin Cx +− cos
∫ dxxcos Cx +sin
∫ dxxtan Cx +secln
∫ dxxcot Cx +sinln
∫ dxx2sec tan x + C
∫ dxxec2cos Cx +− cot
∫ dxxx tansec Cx +sec

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
∫ dxxxec cotcos Cxec +− cos
∫ dxxsinh cosh x + C
∫ dxxcosh sinh x + C
( )∫ + dxbaxsin ( ) Cbaxa
++− cos1
( )∫ + dxbaxcos ( ) Cbaxa
++sin1
( )∫ + dxbax2sec ( ) Cbaxa
++tan1
∫−
dxx 21
1 Cx +−1sin
∫−−
dxx 21
1 Cx +−1cos
∫+
dxx 211
Cx +−1tan
∫+
dxx 1
12
Cx +−1sinh
∫−
dxx 1
12
Cx +−1cosh
∫−
dxx 211
Cx +−1tanh
Let p and q be the functions of x then ;
( )∫ ∫ ∫+=+ dxqdxpdxqp
( )∫ ∫ ∫−=− dxqdxpdxqp
∫ ∫= dxpkdxkp where k is a constant
Example 18 :
Evaluate each of the following indefinite integrals.
a) ( )∫ + dttt 23 65
b) ( )∫−− dxxx 44
c) ∫ dy
d) ( )( )[ ]∫ −+ dwwww 23 4

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
Solution :
a) b) c) d)
4.3.2 The Definite Integrals
A definite integral is an integral
∫b
a
dxxf )(
with upper and lower limits it mean f(x) continuous on closed interval [a, b] and F(x) is the antiderivative (indefinite integral) of f(x) on [a,b], then
[ ]∫ −=b
a
b
aaFbFxFdxxf )()()()( (Fundamental Theorems of Calculus)
Example 19 :
Evaluate the integrals
a) ( )∫ +2
1
23 65 dttt
b) ( ) xdxx∫−−
4
1
44
c) ∫5
0dy
d) ( )( )[ ]∫ −+1
0
23 4 dwwww
Solutions :
a) b) c) d)

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
4.3.3 The u-substitution; change of variables
If u = g(x) is a differentiable function whose range is an interval I and f(x) continuous on I, then
∫ ∫=′ duufdxxgxgf )()())(( where ),( ∞−∞∈I
Example 20 :
Evaluate each of the following integrals.
a) ∫ + dxx 16
b) ∫ −dx
x
x
241
c) ( )∫ −
2
1 253 y
dy
d) ( )∫−
−
++1
2 34
3
2
12dw
ww
w
Solutions :
a)
b)
c)
d)

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
4.4 Techniques of Integration
4.4.1 Integration by-parts
Integration by parts formula is given by ;
∫ ∫ ′−=′ dxvuuvdxvu
Or
∫∫ ′−=′ dxxfxgxgxfdxxgxf )()()()()()(
Example 21 :
Determine ∫ + dxxx 2cos)15(
Solution:
Example 22 :
Evaluate the integrals
a) dxxx∫ )sin(2
b) ∫ + dxxx ))1(2
c) ∫π
0))3(sin( dttt
Solutions :
a)

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
b)
c)
4.4.2 Using Partial Fraction
Consider the rational function
)()(
)(xQ
xPxf = where P and Q are polynomials
The rules of partial fractions are as follows ; a) The degree of P(x) must be less than the degree of Q(x). We factorize the
denominator, Q(x) into its prime factor. It is important to determine the shape of the partial fractions.
Example : dxxxx
xx∫
−+−+23213
23
2
b) The degree of P(x) greater than the degree of Q(x). Divide out by long division.
Example : dxx
xx∫
−+1
3

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
c) Factorize the denominator into its prime factors.
d) A linear factor )( bax + gives a partial fraction of the form : bax
A
+
e) Factors ( )2bax + give partial fractions : ( )2bax
B
bax
A
++
+
f) Factors ( )3bax + give partial fraction : ( ) ( )32bax
C
bax
B
bax
A
++
++
+
g) A quadratic factor ( )cbxax ++2 gives a partial fraction cbxax
BAx
+++
2
Example 23 :
Find ∫ +++
dxx
xx
113 2
Solution :
Use long division
23
3
22
12
33
1312
2
−
−−+−
+
+++x
x
x
xx
xxx
1
323
1
13 2
++−=
+++
xx
x
xx
cxxx
dxx
xx
xx +++−=
++−=
+++
∫∫ 1ln322
3
1
323
1
13 22
Example 24 :
Find ∫ −+
dxx
xx
1
3
Solution :

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
Example 25 :
Evaluate the following integrals
a) dxxxx
x∫ +++
+6116
123
2
b) dxxx
xx∫ −
−−−23
2
7
49142
c) ∫ +++++
dxxx
xxx
33
324
23
d) ∫ ++−+−xxx
xxx35
32
2
21
Solution :
a)
b)

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
c)
d)

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
4.4.3 Integration of Trigonometric Functions
Example 26 :
Determine a) ∫ dxx3cos b) ∫ dxxx 2cos4sin
Solutions :
a) b.)
Example 27 :
Find
a) dxx
∫ − 2364
1 b) dx
x
x∫ + 94
c) dxx
∫ −
−4
1
0 241
1
Solutions :
a)
b) c)

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
4.5 Applications of Differentiation and Integration
4.5.1 Displacement, Velocity, and Acceleration
Given an equation for the displacement of a moving object, find an equation for its velocity and an equation for its acceleration, and use the equations to analyze the motion.
Example 1
Suppose a football is punted into the air. As it rises and falls, its displacement (directed distance) from the ground is a function of the number of seconds since it was punted.
y = -16t2 + 37t + 37 where y is the football’s displacement in feet and t is the number of seconds since it was punted. The velocity of the ball gives its speed and the direction in which it’s going. Because velocity is the instantaneous rate of change, it is a derivative.
velocity = dy/dt = y’ = -32t + 37 Find velocity at t = 1 at t = 2 The dy/dt symbol reminds you of the units for velocity (ft/sec). Speed is the absolute value of velocity. Speed tells how fast an object is going without regard to its direction. Describe the speed and velocity at t = 1 and t = 2 sec. Note that the velocity changes from t = 1 to t = 2 sec. The instantaneous rate of change in velocity is called acceleration. Using v for velocity, v = -32t + 37. Find acceleration. The dv/dt symbol for the derivative gives the units of acceleration. dv/dt is in (feet/second)/sec and written “ft/sec2” Interpret the idea of negative acceleration.
PROPERTIES: Velocity, Speed, and Acceleration If x is the displacement of a moving object from a fixed plane (such as the ground), and t is time, then Velocity: v = x’ = dx/dt
Acceleration: a = v’ = dv/dt = x’’ = d2x/dt2
Speed: |v|

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
Note that the acceleration is constant, -32 ft/sec2, for an object acted on only by gravity. To tell quickly whether an object is speeding up or slowing down, compare the signs of the velocity and acceleration.
Example 2
The position of a ball thrown into the air is observed to be described by the equation
216t12t20y(t) −+=
where y is in feet. We wish to determine the equation of its velocity, and its acceleration.
Solution:
The word indefinite is used because an antiderivative always has an unspecified constant, C, added. This constant is called the constant of integration. The velocity of a moving object is the antiderivative of the acceleration, and the displacement of the object is the antiderivative of the velocity.
TECHNIQUE: Speeding Up or Slowing Down • If velocity and acceleration have the same sign, the object is speeding up. • If velocity and acceleration have different signs, the object is slowing
down.
DEFINITION: Antiderivative, or Indefinite Integral
Function g is an antiderivative (or indefinite integral) of function f iff g’(x) = f(x).

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
4.5.2 Related Rates
The term rate implies a change in a quantity with respect to another quantity, often time. A car’s rate, for example, is its speed and is the distance traveled in a unit of time. If two rates are related, the rate of change of one quantity is tied to the rate of change of another quantity. The Chain Rule offers ways to treat such problems.
Example 3
Suppose air is blown into a spherical balloon at a rate of 36 in3/sec. How fast is the radius of the balloon increasing at the instant that the radius is 3 inches?
Solution:
A procedure for handling a related rates problem like the one above is as follows:
1 Draw a picture of the situation.
2 Introduce variables for quantities that are
changing. Let V be volume and r the radius of the balloon.
3 Write down explicitly what rates are involved. We know that
dt
dV = 36 in3/sec.
We want dt
dr when r = 3 in.
Note: decreasing quantity means a negative derivative.
4 Find an equation relating the quantities involved. V = (
3
4) π r3.
5 Differentiate both sides with respect to t (like implicit differentiation), considering the changing quantities as functions of t.
V = (3
4) π r3, so
dt
dV = (
3
4) π (3 r2
dt
dr)
= 4 π r2 dt
dr
Warning: don't forget the chain rule!
6 Substitute the given rates and other constants. 36 = 4 π 32
dt
dr
Warning: this comes after

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
A few relationships that we will find useful are concentrated in the table shown below
Volume of sphere 3
3
4rV π=
Surface area of sphere 24 rS π= Area of circle 2rA π= Perimeter of circle rP π2= Volume of cylinder hrV 2π=
Volume of cone hrV 2
3
1π=
Area of rectangle xyA =
Perimeter of rectangle yxP 22 +=
Volume of box xyzV =
Sides of Pythagorean triangle 222 bac +=
Example 4
The area of an ink blot at time t is A 2cm , where ttA += 23 . Determine the rate of change in the blot area when t =5. Solution:
differentiating! 7 Solve for the desired rate.
dt
dr=
)34(
362π
= π36
36 =
π1.
So dt
dris approximately 0.32 in/sec

EQT 101: Engineering Mathematics 1 Chapter 4 (Differentiation & Integration)
©Universiti Malaysia Perlis
Exercises
1. The position of an object is observed to be described by the equation,
10358)( 23 −+−= tttts
where s is in meters. We wish to determine the equation of its velocity, and its acceleration.
2. The position of an object is observed to be described by the equation
2)43( −= ts
where s is in meters. We wish to determine the equation of its velocity, and its acceleration.
3. At time t, the volume V 3cm of water leaking tank is V, where 23100 ttV −−= .
Find the rate of water flow from the tank at t = 6 seconds.
4. The radius, r , of a spherical balloon at time t is given by ttr += 2 . Express the volume if the balloon 3Vcm in terms of t and find the rate of change of the volume at 4=t seconds.
5. The radius r cm of a circle increases at a constant rate of 0.5 1−cms . If the
initial radius is 3.5cm, find the radius of the circle after 10 seconds.
6. The radius of the circle is increasing at the rate of 5cm per minute. Find (a) the rate of change of the area of the circle when its radius is 12 cm. (b) the radius of the circle when its area is increasing at a rate of 50π 12 −scm . 7. The volume of a constant height cone is decreasing at a rate of 4 13 −scm . Find
the rate of change in its cross sectional radius when the radius is 5 cm and the height is 8 cm.
Recommended