Automatic Synthesis of Fault-Tolerance
Ali Ebnenasir
Software Engineering and Network Systems Laboratory
Computer Science and Engineering Department
Michigan State University
Advisor: Dr. Sandeep Kulkarni

2
Problem
• Given a program p and a class of faults f,
Question: How do we add desired fault-tolerance properties to p in order to create a new program p’ such that:
Requirements:
1. In the absence of f, the resulting fault-tolerant program p’ behaves similar to p
2. In the presence of f, the resulting fault-tolerant program p’ satisfies the desired fault-tolerance property.

3
Solution Strategies
• Two possible approaches
1. Redesign p’ and verify its correctness w.r.t problem requirements• Expensive approach
2. Automatically synthesize p’ from p• Correct by construction

4
Previous Work on Automated Synthesis

5
Synthesis: Specification-Based
Specification of p(Temporal Logic Expressions/
Automata)
Synthesis Algorithm(prove the satisfiability
of the specification)
FaultsFault-tolerance requirements
(Temporal Logic Expressions)
Fault-tolerant program p’
Program synthesis: Fault-Tolerance synthesis:
[EmersonClarke 1982] [AroraAttieEmerson 1998][AttieEmerson 2001][KupfermannVardi 2001]

6
Synthesis: Calculational
[KulkarniArora 2000] [KulkarniAroraChippada 2001]
Fault-intolerant program p(Transitions)
Synthesis Algorithm(Calculate the set of transitions)
Fault-tolerant program p’(Transitions)
Fault-tolerancerequirements Faults
(Transitions)

7
The Complexity of Calculational Synthesis
• High atomicity model: processes can atomically read/write all program variables– Polynomial in the state space of the fault-intolerant program p [KA00]
• Low atomicity model (distributed programs): processes have read/write restrictions with respect to program variables
– Exponential in the state space of the fault-intolerant program p for synthesizing masking fault-tolerance [KA00]
[KA00] S.S. Kulkarni and A. Arora, Automating the addition of fault-tolerance, FTRTFT 2000.
Propose techniques for the synthesis of fault-tolerant distributed programs

8
Outline• Preliminary concepts
• Synthesis problem
• Current results
– Theoretical issues
• Step-wise automation
• Polynomial-time boundary
• Heuristics
• Pre-synthesized fault-tolerance components
– Practical issues
• A framework for the synthesis of fault-tolerant programs
• Contributions
• Open problems

9
Preliminary Concepts:Programs and Faults
• Program– Finite number of variables with finite domains
– Finite number of processes
• State: a valuation of program variables
• Finite state space Sp
• State predicate X X Sp
• Program p, Fault f { (s0, s1) | (s0, s1) Sp Sp }
• Closure: X is closed in p
XSp
p

10
Preliminary Concepts:Specifications and Fault-Tolerance
• Safety specification: something bad never happens
– Representation { (s0, s1) | (s0, s1) Sp Sp }• E.g., transitions that change the value of a counter from non-zero
values to zero• Liveness specification: something good will eventually happen
– In the absence of faults, fault-tolerant program p’ satisfies the liveness specification of the fault-intolerant program p
• Invariant S, fault-span T Sp
• Fault-tolerance: Failsafe, Nonmasking, Masking
ST
p/f p
f
Sp Program
Fault

11
Preliminary Concepts:Distribution Model
• Read/Write restrictions (low atomicity model)– Assumption: a process cannot write a variable that it cannot read.
• Example: program p• Two processes j, k• Two Boolean variables a and b• Process j cannot read b, but can read and write a
• Write restrictions– Can we include the following transition in the set of transitions of process j?
Write restrictions identify the set of transitions of each process.
a=0,b=0 a=1,b=1
j k
a b

12
Preliminary Concepts:Distribution Model – Continued
• Read restrictions– Can we include the following transition in the set of
transitions of process j?
Groups of transitions (instead of individual transitions) must be chosen.
a=0,b=0 a=1,b=0
a=0,b=1 a=1,b=1
Only if we include the transition

13
Outline• Preliminary concepts
• Synthesis problem
• Current results
– Theoretical issues
• Step-wise automation
• Polynomial-time boundary
• Heuristics
• Pre-synthesized fault-tolerance components
– Practical issues
• A framework for the synthesis of fault-tolerant programs
• Contributions
• Open problems

14
Synthesis Problem
Synthesis Algorithm
Fault-intolerant program p
Specification Spec
Invariant S
(Masking/Nonmasking/Failsafe) Fault-tolerant program p'
Invariant S'Faults f
Distribution restrictions
• Requirements1. No new behaviors are added in the absence of faults.2. In the presence of faults, p’ provides desired level of fault-tolerance.
Desired level of Fault-intolerance (Masking/Nonmasking/Failsafe)

15
Outline• Preliminary concepts
• Synthesis problem
• Current results– Theoretical issues
• step-wise automation
• Polynomial-time boundary
• Heuristics
• Pre-synthesized fault-tolerance components
– Practical issues• A framework for the synthesis of fault-tolerant programs
• Contributions
• Open problems

16
Theoretical Issues:Step-Wise Automation
Intolerant Program
Nonmasking fault-tolerant
Masking fault-tolerant
Failsafe fault-tolerant
Failsafe
[KA
00]

17
Outline• Preliminary concepts
• Synthesis problem
• Current results– Theoretical issues
• step-wise automation
• Polynomial-time boundary
• Heuristics
• Pre-synthesized fault-tolerance components
– Practical issues• A framework for the synthesis of fault-tolerant programs
• Contributions
• Open problems

18
Theoretical Issues: Polynomial-Time Boundary
• Complexity: reduction from 3-SAT to the problem of synthesizing failsafe fault-tolerant distributed programs
In general, the problem of synthesizing failsafe fault-tolerant distributed programs from their fault-intolerant version is
NP-complete.• Intuitively, the exponential complexity is due to the inability of a
process to safely estimate unreadable variables even in the absence of faults (grouping issue).
• What are the necessary and sufficient conditions for polynomial synthesis of failsafe fault-tolerant distributed programs?
• Restrictions on– The transitions of the fault-intolerant programs– Specifications

19
Theoretical Issues: Monotonicity of Specifications
• Definition: A specification spec is positive monotonic with respect to a Boolean variable x iff:
• For every (s0, s1) and (s’0, s’1) grouped together due to inability of reading x
s1s0
x = falsex = false
If
Does not violate safety
s’0 s’1
x = truex = true
Does not violate safety
Then

20
Theoretical Issues: Monotonicity of Programs
• Definition: Program p with invariant S is positive monotonic with respect to a Boolean variable x iff:
• For every (s0, s1) and (s’0, s’1) grouped together due to inability of reading x
s1s0
Invariant S
x = falsex = false
s’0 s’1
x = truex = true
Monotonicity requirements capture the notion that safe assumptions can be made about variables that cannot be read

21
Theoretical Issues: Monotonicity Theorem
• Sufficiency: if
• Program is negative monotonic, and• Spec is positive monotonic
– Or• Program is positive monotonic, and• Spec is negative monotonic
Then Synthesis of failsafe fault-tolerance can be done in polynomial time
• Necessity: If only one of these conditions is satisfied then synthesizing failsafe fault-tolerance remains NP-complete.
• For many problems, these requirements are easily met (e.g., Byzantine agreement, consensus, atomic commit)

22
Theoretical Issues: An Example for Monotonicity Theorem
• Dijkstra’s guarded commands (actions)– Guard Statement– { (s0, s1) | Guard holds at s0 and atomic execution of Statement yields s1 }
• Example: Byzantine agreement– Safety Specification of Byzantine agreement:
• Agreement: No two non-Byzantine non-generals can finalize with different decisions• Validity: If g is not Byzantine then no non-Byzantine process can finalize with a
different decision with respect to g
– Processes: General, g, and three non-generals j, k, and l– d.g : {0, 1}– d.j, d.k, d.l : {0, 1, ┴ }– b.g, b.j, b.k, b.l : {0, 1}– f.j, f.k, f.l : {0, 1}
g
lkj

23
Theoretical Issues: An Example for Monotonicity Theorem
• Program actions for process jd.j = ┴ f.j = 0 d.j := d.gd.j ≠ ┴ f.j = 0 f.j := 1
• Fault transitions for process j¬b.g ¬b.j ¬b.k ¬b.l b.j := 1b.j d.j :=0|1
• Read/Write restrictions:– Readable variables for process j:
• b.j, d.j, f.j, d.g, d.k, d.l– Process j can write d.j, f.j

24
Theoretical Issues: An Example for Monotonicity Theorem – Continued
• Observation 1: Negative monotonicity of specification with respect to f.j
• Observation 2: Positive monotonicity of program, consisting of the transitions of j, with respect to f.k
• Observation 3: Positive monotonicity of specification with respect to b.j
– The specification does not stipulate anything about the Byzantine processes
• Observation 4: Negative monotonicity of program, consisting of the transitions of j, with respect to b.k
Synthesis of agreement program that is failsafe to Byzantine faults can be done in polynomial time.

25
Outline• Preliminary concepts
• Synthesis problem
• Current results– Theoretical issues
• step-wise automation
• Polynomial-time boundary
• Heuristics
• Pre-synthesized fault-tolerance components
– Practical issues• A framework for the synthesis of fault-tolerant programs
• Contributions
• Open problems

26
Theoretical Issues: Heuristics
• Heuristic: A strategy for making deterministic decisions to reduce the complexity of synthesis
– Example: Reuse the structure of nonmasking programs in the synthesis of their masking versions
Intolerant Program
Nonmasking fault-tolerant
Masking fault-tolerant
Fault-ToleranceEnhancement

27
Outline• Preliminary concepts
• Synthesis problem
• Current results– Theoretical issues
• step-wise automation
• Polynomial-time boundary
• Heuristics
• Pre-synthesized fault-tolerance components
– Practical issues• A framework for the synthesis of fault-tolerant programs
• Contributions
• Open problems

28
Theoretical Issues:
Pre-Synthesized Fault-Tolerance Components• What if existing heuristics fail?
• How can we reuse the techniques used in the synthesis of a program, in the synthesis of another program?
• Can we encapsulate commonly encountered synthesis patterns in terms of pre-synthesized fault-tolerance components?
• Detectors and correctors are necessary and sufficient in the design of fault-tolerance [AK98]– Detectors and correctors have the potential to provide a rich library of pre-
synthesized fault-tolerance components
[AK98] A. Arora and S.S. Kulkarni, Detectors and Correctors: A Theory of Fault-Tolerance , IEEE ICDCS 1998.

29
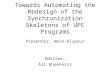
Theoretical Issues:Using Pre-Synthesized Components
• If available heuristics fail to add recovery from a deadlock state sd
Automatically specify the required component
Extract the component from the component library
Verify the interference-freedom of the composition
Add extracted component to the fault-intolerant program

30
Theoretical Issues:Pre-Synthesized Components - Achievements
• Reducing the chance of failure in the synthesis
• Providing a mechanism for the reuse of synthesis techniques
• Extending the scope of synthesis problem where the state space is expanded during the synthesis
• Controlling the way new variables are introduced

31
Outline• Preliminary concepts
• Synthesis problem
• Current results– Theoretical issues
• step-wise automation
• Polynomial-time boundary
• Heuristics
• Pre-synthesized fault-tolerance components
– Practical issues• A framework for the synthesis of fault-tolerant programs
• Contributions
• Open problems

32
Practical Issues:Framework Goals
• Goals of the framework design
– Ability to synthesize fault-tolerant programs from their fault-intolerant versions
– Ability to integrate new heuristics into the framework
– Ability to change implementation

33
Practical Issues:Synthesis Framework
Synthesis algorithm
Interactive user interface
The user(Fault-tolerance developer)
Query
QueryResults
Resultsp, S, f, spec
p, S, f, spec p’, S’
p’, S’
Guarded commands,State predicates
Guarded commands/Promela,State predicates
Library of pre-synthesized fault-tolerance components
Pre-synthesizeddetectors/correctors
Component specification

34
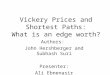
Practical Issues:Framework Internals –Synthesis Algorithm
Remove bad transitions
Remove bad states
Expand the reachability graph
Initialization
Ensure safety
Ensure deadlock freedom
Calculate a valid fault-span
Preserve Invariant
Ensure deadlock freedom
Calculate a valid invariant
Modify Invariant
Resolve non-progress cycles
Reachability graph of the fault-tolerant program
Interaction pointsp, S, f, spec
p’, S’Fault-tolerant program
Fault-intolerant program

35
Practical Issues:Current Status of the Framework
• Example synthesized programs:– Token ring with 7 processes – Byzantine agreement with 4 non-general processes and one general
process– An agreement program that is subject to both Byzantine and fail-stop
faults (1.3 million states)
• Currently, the framework can– handle different types of faults (e.g., process restart, Byzantine, fail-
stop)– synthesize programs that are simultaneously subject to multiple types
of faults

36
Outline• Preliminary concepts
• Synthesis problem
• Current results– Theoretical issues
• step-wise automation
• Polynomial-time boundary
• Heuristics
• Pre-synthesized fault-tolerance components
– Practical issues• A framework for the synthesis of fault-tolerant programs
• Contributions
• Open problems

37
Contributions
• Showing the NP-completeness of synthesizing failsafe fault-tolerance
• Identifying the necessary and sufficient conditions for polynomial-time
synthesis of failsafe fault-tolerance
• Reusing the computational structure of fault-intolerant programs to reduce the
complexity of synthesis (enhancement)
• Identifying synthesis patterns as pre-synthesized fault-tolerance components
• Developing a framework for the synthesis of fault-tolerant programs

38
Outline• Preliminary concepts
• Synthesis problem
• Current results– Theoretical issues
• step-wise automation
• Polynomial-time boundary
• Heuristics
• Pre-synthesized fault-tolerance components
– Practical issues• A framework for the synthesis of fault-tolerant programs
• Contributions
• Open problems

39
Open Problems• Theoretical issues
– Non-monotonic programs/specifications to monotonic ones
• Extending the scope of the programs that can reap the benefit of efficient
automation
– Necessary and sufficient conditions for simultaneous addition of multiple
pre-synthesized fault-tolerance components
– Necessary and sufficient conditions for polynomial-time synthesis of
nonmasking fault-tolerant programs
– Automated synthesis of multitolerance

40
Open Problems - Continued
• Practical issues– Distributed synthesis algorithm
– Symbolic synthesis of fault-tolerance
Distributed Synthesis Algorithm
SAT solver SAT solver
Verify safety Y/N Closure Y/N Cycle detection
Y/N
. . .SAT solver

41
Open Problems - Continued
• Using model checkers for acquiring behavioral information during synthesis
Distributed Synthesis Algorithm
. . .SPIN SPIN SPIN

42
Publications• Published papers
– Sandeep S. Kulkarni and Ali Ebnenasir. "Enhancing The Fault- Tolerance of Nonmasking Programs". IEEE ICDCS 2003.
– Ali Ebnenasir. "Algorithmic Synthesis of Fault-Tolerant Distributed Programs". Doctoral Symposium of ICDCS 2003.
– Sandeep S. Kulkarni and Ali Ebnenasir. "The Complexity of Adding Failsafe Fault-Tolerance". IEEE ICDCS 2002.
• Submitted papers – Sandeep S. Kulkarni and Ali Ebnenasir. "Adding Fault-
Tolerance Using Pre-Synthesized Components". Submitted to CBSE7, ICSE 2004.
– Ali Ebnenasir and Sandeep S. Kulkarni . "A Framework for Automatic Synthesis of Fault-Tolerance". Submitted to DSN 2004.
– Sandeep S. Kulkarni and Ali Ebnenasir. "Automated Synthesis of Multitolerance". Submitted to DSN 2004.

43
Thank you!
Questions and comments?
Recommended