KCEC2117 Control Engineering Assignment 1
Q1
Chapter 2
Dynamic Models
Problems and Solutions for Section 2.1
1. Write the di§erential equations for the mechanical systems shown in Fig. 2.39.
For (a) and (b), state whether you think the system will eventually de-
cay so that it has no motion at all, given that there are non-zero initial
conditions for both masses, and give a reason for your answer.
Figure 2.39: Mechanical systems
Solution:
2003

2004 CHAPTER 2. DYNAMIC MODELS
The key is to draw the Free Body Diagram (FBD) in order to keep the
signs right. For (a), to identify the direction of the spring forces on the
object, let x2 = 0 and Öxed and increase x1 from 0. Then the k1 springwill be stretched producing its spring force to the left and the k2 springwill be compressed producing its spring force to the left also. You can use
the same technique on the damper forces and the other mass.
(a)Free body diagram for Problem 2.1(a)
m1x1 = k1x1 b1 _x1 k2 (x1 x2)m2x2 = k2 (x2 x1) k3 (x2 y) b2 _x2
There is friction a§ecting the motion of both masses; therefore the
system will decay to zero motion for both masses.
Free body diagram for Problem 2.1(b)
m1x1 = k1x1 k2(x1 x2) b1 _x1m2x2 = k2(x2 x1) k3x2
Although friction only a§ects the motion of the left mass directly,
continuing motion of the right mass will excite the left mass, and
that interaction will continue until all motion damps out.

2005
Figure 2.40: Mechanical system for Problem 2.2
m1 m2
x1 x2
k (x - x )2 1 2 k (x - x )2 1 2
k x1 1
b (x - x )1 1 2 b (x - x )1 1 2. .. .
F
Free body diagram for Problem 2.1(c)
m1x1 = k1x1 k2(x1 x2) b1( _x1 _x2)
m2x2 = F k2(x2 x1) b1( _x2 _x1)
2. Write the di§erential equations for the mechanical systems shown in Fig. 2.40.
State whether you think the system will eventually decay so that it has
no motion at all, given that there are non-zero initial conditions for both
masses, and give a reason for your answer.
Solution:
The key is to draw the Free Body Diagram (FBD) in order to keep the
signs right. To identify the direction of the spring forces on the left side
object, let x2 = 0 and increase x1 from 0. Then the k1 spring on the leftwill be stretched producing its spring force to the left and the k2 springwill be compressed producing its spring force to the left also. You can use
the same technique on the damper forces and the other mass.
m1 m2
x1 x2
x2
k (x - x )2 1 2
k x1 1 k1b (x - x )2 1 2 b (x - x )2 1 2. . . .
Free body diagram for Problem 2.2

Q2
" g Figure 3-81 Spring-loaded pendulum system.
B-3-17. Referring to Examples 3-8 and 3-9, consider the inverted p'endulum system shown in Figure 3-82. Assume that the mass of the inverted pendulum is rn and is evenly distributed along the length of the rod. (The center of grav- ity of the pendulum is located at the center of the rod.) As- suming that 8 is small, derive mathematical models for the system in the forms of differential equations, transfer func- tions, and state-space equations.
Figure 3-82 Inverted pendulum system.
B-3-18. Obtain the transfer functions X , ( s ) / U ( s ) and X,(s)/U(s) of the mechanical system shown in Figure 3-83.
B-3-19. Obtain the transfer function E,(s)/E,(s) of the electrical circuit shown in Figure 3-84.
Figure 3-84 Electrical circuit.
B-3-20. Consider the electrical circuit shown in Figure 3-85. Obtain the transfer function E,(s)/E,(s) by use of the block diagram approach.
Figure 3-85 Electrical circuit.
B-3-21. Derive the transfer function of the electrical cir- cuit shown in Figure 3-86. Draw a schematic diagram of an analogous mechanical system.
Figure 3-83 Mechanical system.
Problems
Figure 3-86 Electrical circuit.


Q3
PROBLEMS
B-2-1. Find the Laplace transforms of the following functions:
(a) fi( t) = 0, fort < O = e-O 4r cos 12t, fort 2 0
(b) f2(t) = 0, fort < O
B-2-2. Find the Laplace transforms of the following functions:
(a) fi(t) = 0, for t < 0 = 3 sin(5t + 45"), fort r 0
(b) f2(t) = 0, fort < O =0.03(1-cos2t), f o r t 2 0
B-2-3. Obtain the Laplace transform of the function de- fined by
f ( t ) = 0, for t < 0 - - t2e-ar , fort 2 0
B-2-4. Obtain the Laplace transforms of the following functions:
(a) f (t) = 0, fort < 0 =sinwt.coswt, f o r t 2 0
(b) f (t) = 0, for t < O = te-' sin 5t, for t 2 0
B-2-5. Obtain the Laplace transform of the function de- fined by
f ( t ) = 0, for t < 0 = cos2ot cos3wt, for t 2 0
B-2-7. Obtain the Laplace transform of the function f (t) shown in Figure 2-6.
0 T ' Function f (t)
B-2-8. Find the Laplace transform of the function f (t) shown in Figure 2-7.Als0, find the limiting value of Y[f (t)] as a approaches zero.
B-2-6. What is the Laplace transform of the function f (t) shown in Figure 2-5? B-2-9. By applying the final-value theorem, find the final
value off (t) whose Laplace transform is given by
10 F(s) = ---- S ( S + 1)
Verify this result by taking the inverse Laplace transform of F ( s ) and letting t -+ m.
B-2-10. Given 1 F(s) = -
(s + 2)2 Figure 2-5 determine the values off (O+) and f (0+). (Use the initial-
0 a a + b t Function f (t). value theorem.)
Problems 5 1


Q4
B-2-11. Find the inverse Laplace transform of B-2-17. A function B ( s ) / A ( s ) consists of the following zeros, poles, and gain K: s + l F ( s ) =
s(s2 + S + 1) zeros at s = -1, s = -2 poles at s = 0, s = -4, s = -6 B-2-12. Obtain the inverse Laplace transform of the fol- gain K = 5 lowing function:
Obtain the expression for B ( s ) / A ( s ) = numlden with MATLAB.
B-2-13. Find the inverse Laplace transforms of the follow- B-2-18. What is the solution of the following differential ing functions: equation?
B-2-19. Solve the differential equation
B-2-14. Find the inverse Laplace transforms of the follow- .i + 2x = S( t ) , x(O-) = 0 ing functions:
I B-2-20. Solve the following differential equation: -
x + 2(w,k + mix = 0, x (0 ) = a, i ( 0 ) = b w ', (b) F2(s) = s(s2 + 2&0,,s + w',) (0 < 5 < 1 )
where a and b are constants. B-2-15. Obtain the partial-fraction expansion of the fol- lowing function witW MATLAB: B-2-21. Obtain the solution of the differential equation
= ( "1 - ( S + 1) ( s + 3) ( s + 5)2 B-2-22. Obtain the solution of the differential equation
Then, obtain the inverse Laplace transform of F(s) . B-2-16. Consider the following function F(s):
s4 + 5s3 + 6s' + 9s + 30 B-2-23. Solve the following differential equation: F ( s ) = s4 + 6s3 + 21s2 + 46s + 30 x + 2 i + l ox = e-', x (0 ) = 0, i ( 0 ) = 0
Using MATLAB, obtain the partial-fraction expansion of The foreing function e-' is given at t = 0 when the system is F(s) . Then, obtain the inverse Laplace transform of F(s) . at rest.
Chapter 2 / The Laplace Transform


Q5
B-2-11. Find the inverse Laplace transform of B-2-17. A function B ( s ) / A ( s ) consists of the following zeros, poles, and gain K: s + l F ( s ) =
s(s2 + S + 1) zeros at s = -1, s = -2 poles at s = 0, s = -4, s = -6 B-2-12. Obtain the inverse Laplace transform of the fol- gain K = 5 lowing function:
Obtain the expression for B ( s ) / A ( s ) = numlden with MATLAB.
B-2-13. Find the inverse Laplace transforms of the follow- B-2-18. What is the solution of the following differential ing functions: equation?
B-2-19. Solve the differential equation
B-2-14. Find the inverse Laplace transforms of the follow- .i + 2x = S( t ) , x(O-) = 0 ing functions:
I B-2-20. Solve the following differential equation: -
x + 2(w,k + mix = 0, x (0 ) = a, i ( 0 ) = b w ', (b) F2(s) = s(s2 + 2&0,,s + w',) (0 < 5 < 1 )
where a and b are constants. B-2-15. Obtain the partial-fraction expansion of the fol- lowing function witW MATLAB: B-2-21. Obtain the solution of the differential equation
= ( "1 - ( S + 1) ( s + 3) ( s + 5)2 B-2-22. Obtain the solution of the differential equation
Then, obtain the inverse Laplace transform of F(s) . B-2-16. Consider the following function F(s):
s4 + 5s3 + 6s' + 9s + 30 B-2-23. Solve the following differential equation: F ( s ) = s4 + 6s3 + 21s2 + 46s + 30 x + 2 i + l ox = e-', x (0 ) = 0, i ( 0 ) = 0
Using MATLAB, obtain the partial-fraction expansion of The foreing function e-' is given at t = 0 when the system is F(s) . Then, obtain the inverse Laplace transform of F(s) . at rest.
Chapter 2 / The Laplace Transform


KCEC2117 Control Engineering Assignment 2 Q1
Since limP1(s) = T, + Tb + ... + Tm s-io
we have
For a unit-step input r ( t ) , since
L m e ( t ) dt = lim E(s) = lim 1 R(s) = lim 1 1 - 1 -
1 - - s-+O 3-0 1 + G(S) s - o I + G ( s ) ~ - ~ ~ ~ s G ( s ) K~
we have
Note that zeros in the left half-plane (that is, positive c,, Tb, . . . , Tm) will improve K,. Poles close to the origin cause low velocity-error constants unless there are zeros nearby.
PROBLEMS
B-5-1. A thermometer requires 1 min to indicate 98% of B-5-4. Figure 5-79 is a block diagram of a space-vehicle the response t'o a step input.Assuming the thermometer to attitude-control system. Assuming the time constant T of be a first-order system, find the time constant. the controller to be 3 sec and the ratio K/J to be rad2/sec2,
If the thermometer is placed in a bath, the temperature find the damping ratio of the system. of which is changing linearly at a rate of lO0/min, how much error does the thermometer show? K(Ts + I)
B-5-2. Consider the unit-step response of a unity-feedback I- Space
control system whose open-loop transfer function is vehicle
1 Figure 5-79 G(s) = - s(s + 1) Space-vehicle attitude-control system.
Obtain the rise time, peak time, maximum overshoot, and settling time.
B-5-3. Consider the closed-loop system given by
Determine the values of 5 and w, so that the system responds to a step input with approximately 5% overshoot and with a settling time of 2 sec. (Use the 2% criterion.)
B-5-5. Consider the system shown in Figure 5-80.The sys- tem is initially at rest. Suppose that the cart is set into mo- tion by an impulsive force whose strength is unity. Can it be stopped by another such impulsive force?
- x
Impulsive
Figure 5-80 Mechanical system.
330 Chapter 5 / Transient and Steady-State Response Analyses

© 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.

Q2
Since limP1(s) = T, + Tb + ... + Tm s-io
we have
For a unit-step input r ( t ) , since
L m e ( t ) dt = lim E(s) = lim 1 R(s) = lim 1 1 - 1 -
1 - - s-+O 3-0 1 + G(S) s - o I + G ( s ) ~ - ~ ~ ~ s G ( s ) K~
we have
Note that zeros in the left half-plane (that is, positive c,, Tb, . . . , Tm) will improve K,. Poles close to the origin cause low velocity-error constants unless there are zeros nearby.
PROBLEMS
B-5-1. A thermometer requires 1 min to indicate 98% of B-5-4. Figure 5-79 is a block diagram of a space-vehicle the response t'o a step input.Assuming the thermometer to attitude-control system. Assuming the time constant T of be a first-order system, find the time constant. the controller to be 3 sec and the ratio K/J to be rad2/sec2,
If the thermometer is placed in a bath, the temperature find the damping ratio of the system. of which is changing linearly at a rate of lO0/min, how much error does the thermometer show? K(Ts + I)
B-5-2. Consider the unit-step response of a unity-feedback I- Space
control system whose open-loop transfer function is vehicle
1 Figure 5-79 G(s) = - s(s + 1) Space-vehicle attitude-control system.
Obtain the rise time, peak time, maximum overshoot, and settling time.
B-5-3. Consider the closed-loop system given by
Determine the values of 5 and w, so that the system responds to a step input with approximately 5% overshoot and with a settling time of 2 sec. (Use the 2% criterion.)
B-5-5. Consider the system shown in Figure 5-80.The sys- tem is initially at rest. Suppose that the cart is set into mo- tion by an impulsive force whose strength is unity. Can it be stopped by another such impulsive force?
- x
Impulsive
Figure 5-80 Mechanical system.
330 Chapter 5 / Transient and Steady-State Response Analyses

© 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.

Q3
B-5-6. Obtain the unit-impulse response and the unit- step respolnse of a unity-feedback system whose open-loop transfer function is
B-5-7. Consider the system shown in Figure 5-81. Show that the transfer function Y ( s ) / X ( s ) has a zero in the right- half s plane. Then obtain y ( t ) when x ( t ) is a unit step. Plot y ( t ) versus t. B-5-8. An oscillatory system is known to have a transfer function of the following form:
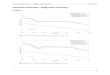
Assume that a record of a damped oscillation is available as shown in Figure 5-82. Determine the damping ratio 5 of the system from the graph. B-5-9. Consider the system shown in Figure 5-83(a). The damping ratio of this system is 0.158 and the undamped nat- ural frequency is 3.16 rad/sec. To improve the relative sta- bility, we employ tachometer feedback. Figure 5-83(b) shows such a tachometer-feedback system.
Determine the value of K, so that the damping ratio of the system is 0.5. Draw unit-step response curves of both the original and tachometer-feedback systems. Also draw the error-versus-time curves for the unit-ramp response of both systems.
- Figurle 5-81 Syste~m with zero in the right-half s plane.
Figure 5-82 Decaying oscillation.
Figure 5-83 (a) Control system; (b) control system with tachometer feedback.
Problems

© 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.

Q4
B-5-10. Referring to the system shown in Figure 5-84, de- B-5-13. Using MATLAB, obtain the unit-step response, termine the values of K and k such that the system has a unit-ramp response, and unit-impulse response of the fol- damping ratio 5 of 0.7 and an undamped natural frequency lowing system: o, of 4 rad/sec.
B-5-11. Consider the system shown in Figure 5-85. Deter- mine the value of k such that the damping ratio { is 0.5.Then obtain the rise time t,, peak time t,, maximum overshoot M,, and settling time t , in the unit-step response.
L A 2 J B-5-12. Using MATLAB, obtain the unit-step response, unit-ramp response, and unit-impulse response of the fol- where is the input and is the output. lowing system:
B-5-14. Obtain both analytically and computationally the
where R ( s ) and C ( s ) are Laplace transforms of the input r ( t ) and output c ( t ) , respectively.
rise time, peak time, maximum overshoot, and settling time in the unit-step response of a closed-loop system given by
I I
Figure 5-84 Closed-loop system.
1 I
Figure 5-85 Block diagram of a system.
Chapter 5 / Transient and Steady-State Response Analyses
B-5-10. Referring to the system shown in Figure 5-84, de- B-5-13. Using MATLAB, obtain the unit-step response, termine the values of K and k such that the system has a unit-ramp response, and unit-impulse response of the fol- damping ratio 5 of 0.7 and an undamped natural frequency lowing system: o, of 4 rad/sec.
B-5-11. Consider the system shown in Figure 5-85. Deter- mine the value of k such that the damping ratio { is 0.5.Then obtain the rise time t,, peak time t,, maximum overshoot M,, and settling time t , in the unit-step response.
L A 2 J B-5-12. Using MATLAB, obtain the unit-step response, unit-ramp response, and unit-impulse response of the fol- where is the input and is the output. lowing system:
B-5-14. Obtain both analytically and computationally the
where R ( s ) and C ( s ) are Laplace transforms of the input r ( t ) and output c ( t ) , respectively.
rise time, peak time, maximum overshoot, and settling time in the unit-step response of a closed-loop system given by
I I
Figure 5-84 Closed-loop system.
1 I
Figure 5-85 Block diagram of a system.
Chapter 5 / Transient and Steady-State Response Analyses

© 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.

Q5
B-5-10. Referring to the system shown in Figure 5-84, de- B-5-13. Using MATLAB, obtain the unit-step response, termine the values of K and k such that the system has a unit-ramp response, and unit-impulse response of the fol- damping ratio 5 of 0.7 and an undamped natural frequency lowing system: o, of 4 rad/sec.
B-5-11. Consider the system shown in Figure 5-85. Deter- mine the value of k such that the damping ratio { is 0.5.Then obtain the rise time t,, peak time t,, maximum overshoot M,, and settling time t , in the unit-step response.
L A 2 J B-5-12. Using MATLAB, obtain the unit-step response, unit-ramp response, and unit-impulse response of the fol- where is the input and is the output. lowing system:
B-5-14. Obtain both analytically and computationally the
where R ( s ) and C ( s ) are Laplace transforms of the input r ( t ) and output c ( t ) , respectively.
rise time, peak time, maximum overshoot, and settling time in the unit-step response of a closed-loop system given by
I I
Figure 5-84 Closed-loop system.
1 I
Figure 5-85 Block diagram of a system.
Chapter 5 / Transient and Steady-State Response Analyses
B-5-10. Referring to the system shown in Figure 5-84, de- B-5-13. Using MATLAB, obtain the unit-step response, termine the values of K and k such that the system has a unit-ramp response, and unit-impulse response of the fol- damping ratio 5 of 0.7 and an undamped natural frequency lowing system: o, of 4 rad/sec.
B-5-11. Consider the system shown in Figure 5-85. Deter- mine the value of k such that the damping ratio { is 0.5.Then obtain the rise time t,, peak time t,, maximum overshoot M,, and settling time t , in the unit-step response.
L A 2 J B-5-12. Using MATLAB, obtain the unit-step response, unit-ramp response, and unit-impulse response of the fol- where is the input and is the output. lowing system:
B-5-14. Obtain both analytically and computationally the
where R ( s ) and C ( s ) are Laplace transforms of the input r ( t ) and output c ( t ) , respectively.
rise time, peak time, maximum overshoot, and settling time in the unit-step response of a closed-loop system given by
I I
Figure 5-84 Closed-loop system.
1 I
Figure 5-85 Block diagram of a system.
Chapter 5 / Transient and Steady-State Response Analyses

© 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.

Q6
B-5-17. Using MATLAB, obtain the unit-step response The unit acceleration input is defined by curve for the unity-feedback control system whose open- loop transfer function is 1
r ( t ) = - t 2 ( t ~ 0 ) 2
B-5-22. Consider the differential equation system given by
Using MATLAB, obtain also the rise time, peak time, max- jj + 3y + 2y = 0, y(0) = 0.1, y(0) = 0.05 imum overshoot, and settling time in the unit-step response curve. Obtain the response y ( t ) , subject to the given initial
condition. B-5-18. Consider the closed-loop system defined by
B-5-23. Determine the range of K for stability of a unity- C ( s ) 25s + 1 feedback control system whose open-loop transfer func- -- - R ( s ) s2 + 25s + 1 tion is
where 5 = 0.2,0.4,0.6,0.8, and 1.0. Using MATLAB, plot G ( s ) = K
a two-dimensional diagram of unit-impulse response S ( S + 1 ) ( s f 2 ) curves. Also plot a three-dimensional plot of the response curves. B-5-24. Consider the unity-feedback control system with
the following open-loop transfer function: B-5-19. Consider the second-order system defined by
G ( s ) = 10
s(s - 1)(2s + 3)
Is this system stable? where 5 = 0.2,0.4, O.6,0.8, 1.0. Plot a three-dimensional diagram of the unit-step response curves. B-5-25. Consider the following characteristic equation:
B-5-20. Obtain the unit-ramp response of the system s4 + 2~~ + ( 4 + K ) S ~ + 9~ + 25 = o defined by
Using Routh stability criterion, determine the range of K for stability.
B-5-26. Consider the closed-loop system shown in Figure 5-88. Determine the range of K for stability. Assume that K > 0.
where u is the unit-ramp input. Use lsim command to obtain the response.
B-5-21. Using MATLAB obtain the unit acceleration R(si B"[Hy (S + l)(s2 + 6s + 25) , c(> response curve of the unity-feedback control system whose open-loop transfer function is
10(s + 1 ) G ( s ) = Figure 5-88
s2(s + 4 ) Closed-loop system.
Chapter 5 / Transient and Steady-State Response Analyses

© 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.

Q7
B-5-27. Consider the satellite attitude control system shown in Figure 5-89(a).The output of this system exhibits continued oscillations and is not desirable. This system can be stabilized by use of tachometer feedback, as shown in Figure 5-89(b). If K/J = 4, what value of Kh will yield the damping ratio to be 0.6?
B-5-28. Consider the servo system with tachometer feedback :shown in Figure 5-90. Determine the ranges of stability for K and Kh. (Note that Ki, must be positive.)
B-5-29. Consider the system x = Ax
where matrix A is given by
A = [ : ] 0 - b2 - bl
(A is called Schwarz matrix.) Show that the first column of the Routh's array of the characteristic equation Is1 - A/ = 0 consists of 1, b,, b,, and b,b3.
Figure 5-89 (a) Unstable satellite attitude control system; (b) stabilized system.
I I
Figure 5-90 Servo system with tachometer feedback.
Problems
B-5-27. Consider the satellite attitude control system shown in Figure 5-89(a).The output of this system exhibits continued oscillations and is not desirable. This system can be stabilized by use of tachometer feedback, as shown in Figure 5-89(b). If K/J = 4, what value of Kh will yield the damping ratio to be 0.6?
B-5-28. Consider the servo system with tachometer feedback :shown in Figure 5-90. Determine the ranges of stability for K and Kh. (Note that Ki, must be positive.)
B-5-29. Consider the system x = Ax
where matrix A is given by
A = [ : ] 0 - b2 - bl
(A is called Schwarz matrix.) Show that the first column of the Routh's array of the characteristic equation Is1 - A/ = 0 consists of 1, b,, b,, and b,b3.
Figure 5-89 (a) Unstable satellite attitude control system; (b) stabilized system.
I I
Figure 5-90 Servo system with tachometer feedback.
Problems

© 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
© 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.

Q8
3043
G 1S
2
G 2
S YR
( a )
G 1S
2
G 7
S YR
( b )
G 3
G 2
G 4S
2
G 6
G 5
G 1G 1 S
2 2
1
G 6
1
S YR
G 7
G 2 G 3 S
11
11
G 4 G 5
( c )
1
1 11
11
Figure 3.53: Block diagrams for Problem 3.20
(b)
Block diagram for Fig. 3.53 (b)
Block diagram for Fig. 3.53 (b): reduced
3042 CHAPTER 3. DYNAMIC RESPONSE
Block diagram reduction for Problem 3.19.
We then move the picko§ point at X2 past the third integrator to gets(b1s+b2)+b3. We have a block with the transfer function b1s
2+b2s+b3at the output. Meanwhile we apply the feedback rule to the Örst inner
loop to get
1s+a1
as shown in the Ögure and repeat for the second and third
loops. We Önally have:
Y
U=
b1s2 + b2s+ b3
s3 + a1s2 + a2s+ a3:
Example on the web in Chapter 3 shows that we can obtain the same
answer using Masonís rule.
20. Find the transfer functions for the block diagrams in Fig. 3.53.
Solution:
(a)
Block diagram for Fig. 3.53 (a)
Y
R=
G11 +G1
+G2:

3042 CHAPTER 3. DYNAMIC RESPONSE
Block diagram reduction for Problem 3.19.
We then move the picko§ point at X2 past the third integrator to gets(b1s+b2)+b3. We have a block with the transfer function b1s
2+b2s+b3at the output. Meanwhile we apply the feedback rule to the Örst inner
loop to get
1s+a1
as shown in the Ögure and repeat for the second and third
loops. We Önally have:
Y
U=
b1s2 + b2s+ b3
s3 + a1s2 + a2s+ a3:
Example on the web in Chapter 3 shows that we can obtain the same
answer using Masonís rule.
20. Find the transfer functions for the block diagrams in Fig. 3.53.
Solution:
(a)
Block diagram for Fig. 3.53 (a)
Y
R=
G11 +G1
+G2:
3043
G 1S
2
G 2
S YR
( a )
G 1S
2
G 7
S YR
( b )
G 3
G 2
G 4S
2
G 6
G 5
G 1G 1 S
2 2
1
G 6
1
S YR
G 7
G 2 G 3 S
11
11
G 4 G 5
( c )
1
1 11
11
Figure 3.53: Block diagrams for Problem 3.20
(b)
Block diagram for Fig. 3.53 (b)
Block diagram for Fig. 3.53 (b): reduced

3044 CHAPTER 3. DYNAMIC RESPONSE
Y
R= G7 +
G1G3G4G6(1 +G1G2)(1 +G4G5)
:
(c)
Top: Block diagram for Fig. 3.53 (c) ; Bottom: Block diagram for
Fig 3.43 (c) reduced.
Y
R= G7 +
G6G4G51 +G4
+G1G2G31 +G2
G4G51 +G4
:
21. Find the transfer functions for the block diagrams in Fig. 3.54, using the
ideas of block diagram simpliÖcation. The special; structure in Fig. 3.54
(b) is called the ìobserver canonical formî and will be discussed in Chap-
ter 7.
Solution:
Part (a): Transfer functions found using the ideas of Figs. 3.8 and 3.9:
(a)
(a) Block diagram for Fig. 3.54 (a).

Q9
3096 CHAPTER 3. DYNAMIC RESPONSE
jt0j = y0e!njjtq1
2;
j0j = y0e!njj0q1
2;
j0 + 2j = y0e!njj(0+2)q1
2= 2 j0j
=) e!njj2 = 2
=) 2 =ln 2
!n jj=
ln 2
!n( 0)
Note: This problem shows that = !n jj (the real part of the poles)is inversely proportional to the time to double.
The further away from the imaginary axis the poles lie, the faster
the response is (either increasing faster for RHP poles or decreasing
faster for LHP poles).
42. Suppose that unity feedback is to be applied around the listed open-loop
systems. Use Routhís stability criterion to determine whether the resulting
closed-loop systems will be stable.
(a) KG(s) = 4(s+2)s(s3+2s2+3s+4)
(b) KG(s) = 2(s+4)s2(s+1)
(c) KG(s) = 4(s3+2s2+s+1)s2(s3+2s2s1)
Solution:
(a)
1 +KG = s4 + 2s3 + 3s2 + 8s+ 8 = 0:
The Rouh array is,
s4 : 1 3 8
s3 : 2 8
s2 : a b
s1 : c
s0 : d

3096 CHAPTER 3. DYNAMIC RESPONSE
jt0j = y0e!njjtq1
2;
j0j = y0e!njj0q1
2;
j0 + 2j = y0e!njj(0+2)q1
2= 2 j0j
=) e!njj2 = 2
=) 2 =ln 2
!n jj=
ln 2
!n( 0)
Note: This problem shows that = !n jj (the real part of the poles)is inversely proportional to the time to double.
The further away from the imaginary axis the poles lie, the faster
the response is (either increasing faster for RHP poles or decreasing
faster for LHP poles).
42. Suppose that unity feedback is to be applied around the listed open-loop
systems. Use Routhís stability criterion to determine whether the resulting
closed-loop systems will be stable.
(a) KG(s) = 4(s+2)s(s3+2s2+3s+4)
(b) KG(s) = 2(s+4)s2(s+1)
(c) KG(s) = 4(s3+2s2+s+1)s2(s3+2s2s1)
Solution:
(a)
1 +KG = s4 + 2s3 + 3s2 + 8s+ 8 = 0:
The Rouh array is,
s4 : 1 3 8
s3 : 2 8
s2 : a b
s1 : c
s0 : d

3097
where
a =2 3 8 1
2= 1 b =
2 8 1 02
= 8;
c =3a 2ba
=8 161
= 24;
d = b = 8:
2 sign changes in the Örst column =) 2 roots not in the LHP=)unstable.
(b)1 +KG = s3 + s2 + 2s+ 8 = 0:
The Routhís array is,
s3 : 1 2
s2 : 1 8
s1 : 6s0 : 8
There are two sign changes in the Örst column of the Routh array.Therefore, there are two roots not in the LHP.
(c)1 +KG = s5 + 2s4 + 3s3 + 7s2 + 4s+ 4 = 0:
The Routh array is,
s5 : 1 3 4
s4 : 2 7 4
s3 : a1 a2
s2 : b1 b2
s1 : c1
s0 : d1
where
a1 =6 72
=12
a2 =8 42
= 2
b1 =7=2 41=2
= 15 b2 =4=2 01=2
= 4
c1 =30 + 2
15=32
15d1 = 4
2 sign changes in the Örst column =) 2 roots not in the LHP =)unstable.
Recommended